Адаптивний захватний пристрій інтелектуального робота
Номер патенту: 14569
Опубліковано: 15.05.2006
Автори: Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович



Формула / Реферат
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи, у губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість взаємодії з першим датчиком зусилля і другим датчиком, з'єднаним із джерелом напруги, напрямні пази кожної з губок розташовані під кутом до подовжньої осі адаптивного захватного пристрою інтелектуального робота, поверненим вершиною вниз, а блок керування приводом губок містить послідовно з'єднані блок затримки, перший суматор і другий формувач сигналу, послідовно з'єднані перший ключ, третій ключ, другий суматор, другий вхід якого через п'ятий ключ підключено до виходу першого ключа, третій формувач сигналу, вихід якого з'єднано з керуючим входом п'ятого ключа, і четвертий ключ, вихід якого підключено до третього виходу блока керування, послідовно з'єднані другий ключ, сигнальний вхід якого з'єднано з другим входом блока керування, шостий ключ, керуючий вхід якого підключено до виходу четвертого ключа, і третій суматор, другий вхід якого з'єднано з першим входом блока керування, а також послідовно з'єднані перший формувач сигналу, вхід якого з'єднано з третім входом блока керування, а вихід - з керуючим входом першого ключа, і сьомий ключ, керуючий вхід якого підключено до виходу четвертого ключа, а вихід - до першого виходу блока керування, причому четвертий вхід блока керування з'єднано з інвертованим входом першого суматора, входом блока затримки і другим виходом блока керування, вихід другого формувача сигналу підключено до керуючих входів другого, третього і четвертого ключів, сигнальний вхід сьомого ключа підключено до виходу першого формувача сигналу, керуючий вхід п'ятого ключа з'єднано з виходом третього формувача сигналу, при цьому вихід третього суматора підключено до четвертого виходу блока керування, який відрізняється тим, що рухливі елементи виконано у вигляді роликів, осі яких розміщені в напрямних пазах, виконаних у вигляді прорізів у стінках губок, контактні поверхні роликів покрито пружним еластичним матеріалом, причому принаймні в одному з напрямних пазів у верхній частині однієї з губок виконано поглиблення для фіксації у первинному стані осі рухливого елемента, що при цьому пружно зв'язана з другим датчиком стискального зусилля, підключеним до джерела напруги через восьмий ключ і зашунтованим за допомогою дев'ятого ключа, керуючий вхід якого підключено до першого виходу блока керування приводом губок, до першого входу якого через четвертий формувач сигналу підключено керуючий вхід восьмого ключа, причому до інтерфейсу блока керування приводом включено додатковий п'ятий вхід, до якого підключено вихід джерела напруги і сигнальний вхід першого ключа.
Текст
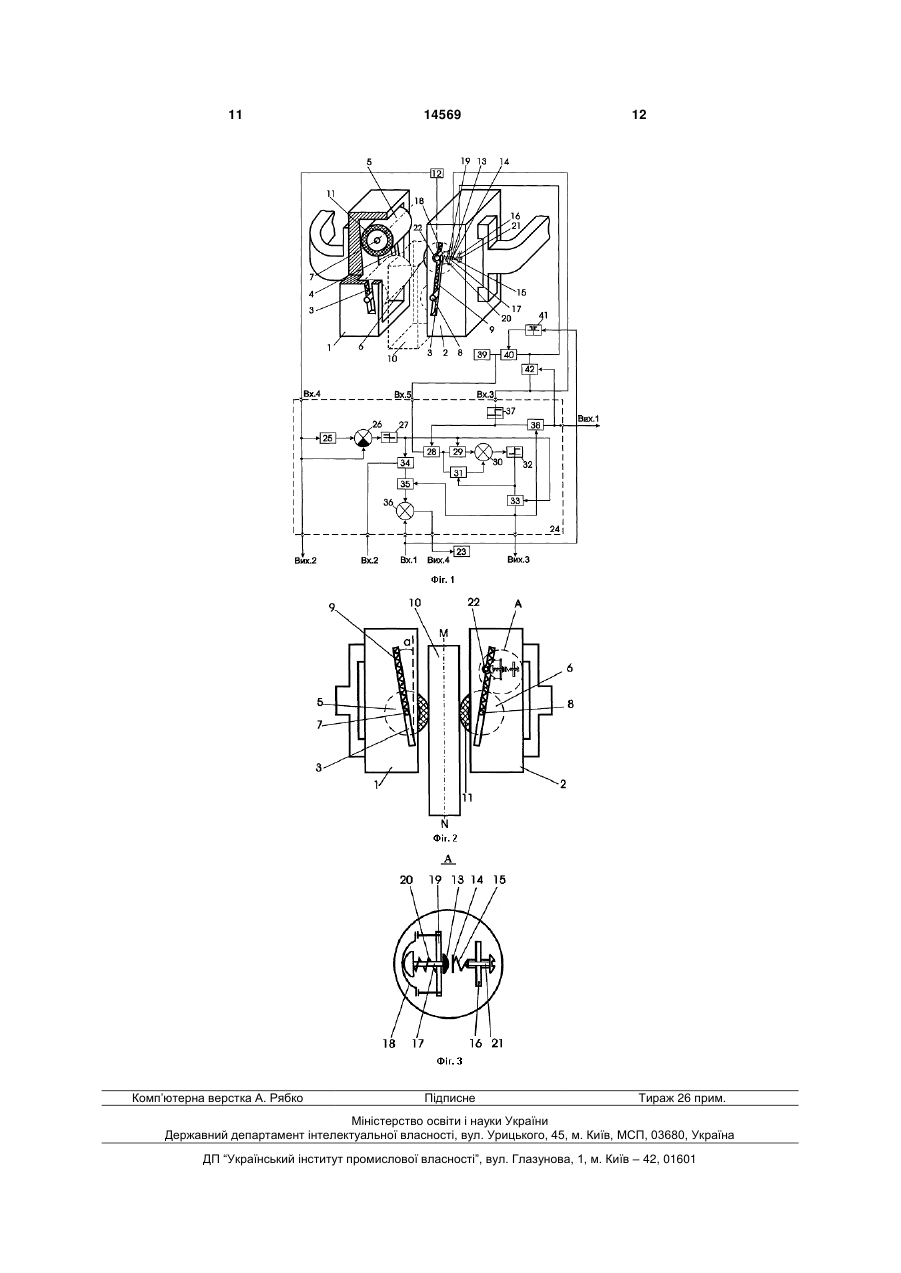
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи, у губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість взаємодії з першим датчиком зусилля і другим датчиком, з'єднаним із джерелом напруги, напрямні пази кожної з губок розташовані під кутом до подовжньої осі адаптивного захватного пристрою інтелектуального робота, поверненим вершиною вниз, а блок керування приводом губок містить послідовно з'єднані блок затримки, перший суматор і другий формувач сигналу, послідовно з'єднані перший ключ, третій ключ, другий суматор, другий вхід якого через п'ятий ключ підключено до виходу першого ключа, третій формувач сигналу, вихід якого з'єднано з керуючим входом п'ятого ключа, і четвертий ключ, вихід якого підключено до третього виходу блока керування, послідовно з'єднані другий ключ, сигнальний вхід якого з'єднано з другим входом блока керування, шостий ключ, керуючий вхід якого підключено до виходу четвертого ключа, і третій суматор, другий U 2 (11) 1 3 пристрою є адаптивний захватний пристрій, до складу якого входять губки з приводом їхнього переміщення, блок керування приводом і датчик проковзування, виконаний у вигляді ролика і встановлений принаймні на одній з губок, а також систему реєстрації проковзування у вигляді джерела і приймача світла [Козырев Ю.Г. Промышленные роботы: Справочник. - М.: Машиностроение, 1983. - с.247, позиція 4]. Такий пристрій має наступні проблеми: - низька швидкодія, через необхідність виконання виконавчим органом інтелектуального робота декількох спробних рухів для створення захватним пристроєм необхідного стискального зусилля, що відповідає масі захоплюваної деталі; спробні рухи виконуються доти, поки не зникне ефект проковзування деталі між пальцями адаптивного захватного пристрою і тільки після цього робот може виконувати необхідні маніпуляційні операції з деталлю; - похибка у точності визначення необхідного стискального зусилля, що залежить від величини кроку дискретизації, тобто від заздалегідь встановленої величини збільшення стискального зусилля адаптивного захватного пристрою після кожного спробного руху. Найбільш близьким аналогом є адаптивний захватний пристрій інтелектуального робота [а.с. СРСР №1373565]. Захватний пристрій містить кінематичне зв'язані з приводом губки, принаймні на одній з яких встановлено перший датчик стискального зусилля, зв'язаний із блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи. У губках виконано напрямні пази, у яких з можливістю переміщення щодо губок встановлені рухливі елементи (накладки), пружно зв'язані з відповідною губкою і мають можливість взаємодії з першим датчиком стискального зусилля. На кожній з губок встановлено стискальний елемент, підпружинений відносно відповідної накладки в напрямку, перпендикулярному подовжній осі адаптивного стискального пристрою, принаймні на одному стискальному елементі встановлено другий датчик стискального зусилля, що має можливість взаємодії з однією із накладок, при цьому накладки виконано клиноподібними, напрямні пази кожної з губок розташовано під кутом, зверненим вершиною вниз, до подовжньої осі адаптивного захватного пристрою, а другий датчик стискального зусилля з'єднано із блоком керування приводом губок і з джерелом напруги. Інтерфейс блоку керування приводом має 4 входи і 4 виходи. Блок керування приводом губок містить: послідовно з'єднані блок затримки, перший суматор і другий формувач сигналу, послідовно з'єднані джерело опорної напруги, перший ключ, третій ключ другий суматор, другий вхід якого через п'ятий ключ підключено до виходу першого ключа, третій формувач сигналу, вихід якого з'єднано з керуючим входом п'ятого ключа, і четвертий ключ, вихід якого підключено до третього виходу блоку керування, послідовно з'єднані другий ключ, сигнальний вхід якого з'єднано із другим входом блоку керування, шостий ключ, керуючий вхід якого підключено до виходу четвертого ключа, і третій суматор, другий 14569 4 вхід якого з'єднано з першим входом блоку керування, а також послідовно з'єднані перший формувач сигналу, вхід якого з'єднано із третім входом блоку керування, а вихід - з керуючим входом першого ключа, і сьомий ключ, керуючий вхід якого підключено до виходу четвертого ключа, а вихід до першого виходу блоку керування, причому четвертий вхід блоку керування з'єднано з інвертованим входом першого суматора, входом блоку затримки і другим виходом блоку керування, вихід другого формувача сигналу підключено до керуючих входів другого, третього і четвертого ключів, сигнальний вхід сьомого ключа підключено до виходу першого формувача сигналу, керуючий вхід п'ятого ключа з'єднано з виходом третього формувача сигналу, при цьому вихід третього суматора підключено до четвертого виходу блоку керування. Такий адаптивний захватний пристрій інтелектуального робота має наступні проблеми: - складність конструкції через виконання кожного пальця адаптивного захватного пристрою інтелектуального робота у вигляді трьох рухливих частин: губки, рухливого елементу (накладки) і стискального елементу, підпружиненого щодо накладки; - дуже високі вимоги щодо допусків при виготовленні з'єднання "напрямний паз - виступ" для забезпечення надійного функціонування захватного пристрою, тобто для надійного переміщення накладок щодо губок; - низька надійність адаптивного захватного пристрою, яка обумовлена постійно ввімкненим у роботу другим датчиком зусилля, через контакти якого в процесі всього циклу захоплювання деталі з формуванням необхідного стискального зусилля, протікає струм. При цьому функціональне призначення другого датчика полягає у формуванні сигналу тільки на етапі створення мінімального стискального зусилля. В основу корисної моделі поставлено задачу удосконалення адаптивного захватного пристрою інтелектуального робота шляхом зміни конструкції рухливих елементів, напрямних елементів та електронного блоку управління приводом губок, що призводить до спрощення конструкції адаптивного захватного пристрою інтелектуального робота та підвищення її надійності. Поставлена задача вирішується тим, що в запропонованому адаптивному захватному пристрої інтелектуального робота, що містить кінематичне зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи, у губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість взаємодії з першим датчиком зусилля і другим датчиком, з'єднаним із джерелом напруги, напрямні пази кожної з губок розташовані під кутом до подовжньої осі адаптивного захватного пристрою інтелектуального робота, зверненим вершиною вниз, а блок керування приводом губок містить послідовно з'єднані блок затримки, перший суматор і другий формувач сиг 5 налу, послідовно з'єднані перший ключ, третій ключ, другий суматор, другий вхід якого через п'ятий ключ підключено до виходу першого ключа, третій формувач сигналу, вихід якого з'єднано з керуючим входом п'ятого ключа, і четвертий ключ, вихід якого підключено до третього виходу блока керування, послідовно з'єднані другий ключ, сигнальний вхід якого з'єднано з другим входом блока керування, шостий ключ, керуючий вхід якого підключено до виходу четвертого ключа, і третій суматор, другий вхід якого з'єднано з першим входом блока керування, а також послідовно з'єднані перший формувач сигналу, вхід якого з'єднано із третім входом блока керування, а вихід - з керуючим входом першого ключа, і сьомий ключ, керуючий вхід якого підключено до виходу четвертого ключа, а вихід - до першого виходу блока керування, причому четвертий вхід блока керування з'єднано з інвертованим входом першого суматора, входом блока затримки і другим виходом блока керування, вихід другого формувача сигналу підключено до керуючих входів другого, третього і четвертого ключів, сигнальний вхід сьомого ключа підключено до виходу першого формувача сигналу, керуючий вхід п'ятого ключа з'єднано з виходом третього формувача сигналу, при цьому вихід третього суматора підключено до четвертого виходу блока керування, згідно з корисною моделлю рухливі елементи виконано у вигляді роликів, осі яких розміщені в напрямних пазах, виконаних у вигляді прорізів у стінках губок, контактні поверхні роликів покрито пружним еластичним матеріалом, причому, принаймні, в одному з напрямних пазів у верхній частині однієї з губок виконано поглиблення для фіксації у первинному стані осі рухливого елемента, що при цьому пружно зв'язана з другим датчиком стискального зусилля, підключеним до джерела напруги через восьмий ключ і зашунтованим за допомогою дев'ятого ключа, керуючий вхід якого підключено до першого виходу блока керування приводом губок, до першого входу якого через четвертий формувач сигналу підключено керуючий вхід восьмого ключа, причому до інтерфейсу блока керування приводом включено додатковий п'ятий вхід, до якого підключено вихід джерела напруги і сигнальний вхід першого ключа. Винахідницький рівень забезпечується виконанням рухливих елементів у вигляді роликів, контактні поверхні яких покрито пружним еластичним матеріалом, із двома ступенями рухливості, що дозволило якісно поліпшити процес "самозатиску" деталі, перейшовши від тертя ковзання до тертя кочення при зміні положення рухливих елементів. При цьому усувається можливість перекосу стискальних елементів при стисканні об'єкту (деталі). Технічний результат відноситься до всієї сукупності істотних ознак, оскільки використання роликів із двома ступенями рухливості в якості рухливих елементів дозволило удосконалити конструкцію напрямних пазів, що привело до створення технологічних з'єднань "проріз-вісь" замість "паз-виступ" у порівнянні з прототипом, а також дозволило удосконалити конструкцію другого датчика стискального зусилля, пружно зв'язавши його з віссю одного з рухливих елементів у її первинному стані, для 14569 6 чого, принаймні, в одному з напрямних пазів у верхній частині однієї з губок виконано відповідне поглиблення. Використання восьмого та дев'ятого ключів, а також четвертого формувача сигналу для керування процесами підключення другого датчика стискального зусилля до джерела напруги при взаємодії з блоком керування приводом губок забезпечило виконання конструкції другого датчика зусилля таким чином, щоб при використанні керованого шунтуючого дев'ятого ключа робочі контакти другого датчика було включено в електричний ланцюг тільки до моменту створення мінімального значення стискального зусилля, а протягом всього процесу функціонування адаптивного захватного пристрою робочі контакти будуть знеструмлені. При цьому суттєво підвищується надійність адаптивного захватного пристрою інтелектуального робота. Така сукупність нових ознак і складає винахідницький задум, що відрізняється новизною й істотними відмінностями. Такий адаптивний захватний пристрій інтелектуального робота може бути широко застосований у промисловості, зокрема, для автоматизації складальних операцій, якщо необхідно попередньо розпізнавати складові частини об'єкта зборки, що відрізняються за масою, чи для автоматизації сортувальних операцій при обслуговуванні роботом конвеєра, деталі на який надходять випадковим чином. Адаптивний захватний пристрій дозволить автоматизувати процеси з крихкими деталями і деталями, що легко піддаються деформації. При реєстрації зміни маси об'єкта маніпулювання в процесі виконання інтелектуальним роботом відповідної технологічної операції його система керування може здійснювати адаптивну самокорекцію параметрів алгоритму керування з урахуванням поточних значень маси об'єкта маніпулювання, що дозволить суттєво підвищити точність реалізації бажаної траєкторії руху захватного пристрою інтелектуального робота. На фіг.1 наведено схему адаптивного захватного пристрою інтелектуального робота (загальний вигляд) із блоком керування приводом губок; на фіг.2 - схема адаптивного захватного пристрою інтелектуального робота з деталлю (фасадна проекція); на фіг.3 - вузол "А" другого датчика стискального зусилля, що виділений штриховим фрагментом "А" на фіг.2. У губках 1 і 2 (фіг.1) адаптивного захватного пристрою інтелектуального робота виконано напрямні пази 3 і 4, у яких з можливістю переміщення щодо губок 1 і 2 встановлено рухливі елементи 5 і 6, кожний з яких може бути виконаний у вигляді ролика. Осі роликів 7 і 8 розміщено в пазах 3 і 4 відповідних губок 1 і 2. Напрямні пази 3 і 4 виконано у вигляді прорізів у стінках губок 1 і 2, при цьому напрямні пази 3 і 4 кожної з губок 1 і 2 розташовано під кутом до подовжньої осі MN адаптивного захватного пристрою, зверненим вершиною вниз. Ролики 5 і 6, крім кінематичного з'єднання "проріз-вісь", зв'язано з відповідною губкою 1 і 2 за допомогою пружних елементів 9, розміщених у прорізах 3 і 4. Поверхню кожного ролика 5 і 6, що контактує з об'єктом 10 (фіг.1, 2), покрито пружним еластичним шорсткуватим матеріалом 7 11, наприклад гумою. Адаптивний захватний пристрій інтелектуального робота обладнано першим датчиком 12 стискального зусилля, що реєструє переміщення рухливого елемента 6 при нарощуванні стискального зусилля адаптивного захватного пристрою. Датчик 12 стискального зусилля може бути виконаний, наприклад, потенціометричним, ємнісним чи індуктивним. Другий датчик стискального зусилля закріплено на зовнішній стінці губки 2. Він складається (фіг.3) із двох електропровідних контактів (пластин) 13 і 14. Контакт 14 за допомогою пружного елемента 15 підпружинено відносно стійки 16, жорстко закріпленої на губці 2, а контакт 13 закріплено на одному з кінців штока 17, інший кінець якого контактує з пружною накладкою 18, кінці якої закріплено на стійці 19. Відносно стійки 19 шток 17 підпружинено за допомогою пружного елемента 20. Інтервал між контактами 13 і 14 можна регулювати за допомогою регулювального гвинта 21. При цьому контакти 13 і 14 повинні бути ізольовані від струмопровідних частин другого датчика зусилля, що може бути досягнуто шляхом виконання стійок 16 і 19 з діелектричного матеріалу. У напрямному прорізі 3 губки 2, на якій встановлено другий датчик зусилля, виконано поглиблення 22 для фіксації у первинному стані осі 8 ролика 6. Інтерфейс блока 24 керування приводом 23 має 5 входів і 4 виходи. Привід 23 губок 1 і 2 адаптивного захватного пристрою інтелектуального робота підключено до четвертого виходу (фіг.1) блока 24 керування приводом, до четвертого та третього входів якого також підключено перший 12 і другий датчики стискального зусилля відповідно. До складу блока 24 керування приводом 23 входять послідовно з'єднані блоки затримки 25, перший суматор 26 і другий формувач сигналу 27, послідовно з'єднані перший ключ 28, третій ключ 29, другий суматор 30, другий вхід якого через п'ятий ключ 31 підключено до виходу першого ключа 28, третій формувач сигналу 32, вихід якого з'єднано з керуючим входом п'ятого ключа 31, і четвертий ключ 33, вихід якого підключено до третього виходу блока керування 24. Крім того, блок 24 містить послідовно з'єднані другий ключ 34, сигнальний вхід якого з'єднано із другим входом блока керування 24, шостий ключ 35, керуючий вхід якого підключено до виходу четвертого ключа 33, і третій суматор 36, другий вхід якого з'єднано з першим входом блока керування 24, а також послідовно з'єднані перший формувач сигналу 37, вхід якого з'єднано з третім входом блока керування 24, а вихід - з керуючим входом першого ключа 28, і сьомий ключ 38, керуючий вхід якого підключено до виходу четвертого ключа 33, а вихід - до першого виходу блока керування 24. Вихід датчика 12 зусилля з'єднано з інвертованим входом першого суматора 26, входом блока затримки 25 і другим виходом блока керування 24, а вихід другого формувача сигналу 27 підключено до керуючих входів другого 34, третього 29 і четвертого 33 ключів. Другий датчик зусилля (контакт 13) підключено до джерела напруги 39 через восьмий ключ 40, керуючий вхід якого через четвертий формувач сигналу 41 з'єднано з першим входом блока керування 24 приводом 23. Контакти 13 і 14 14569 8 зашунтовані дев'ятим ключем 42, керуючий вхід якого підключено до першого виходу блока керування 24 приводом 23, третій вхід якого з'єднано безпосередньо з контактом 14 другого датчика стискального зусилля. Вихід джерела напруги 39 підключено також до п'ятого входу блока керування 24, що з'єднано із сигнальним входом першого ключа 28. Запропонований пристрій працює таким чином. У первинному стані (перед захоплюванням об'єкта 10) перший 28, третій 29, п'ятий 31 і дев'ятий 42 ключі знаходяться в розімкнутому стані, а другий 34, четвертий 33, шостий 35, сьомий 38 і восьмий 40 ключі - замкнуті. При подачі командного сигналу на другий вхід блока керування 24, що відповідає команді "захоплювання об'єкта", привід 23 через замкнуті ключі 34 і 35 одержує живлення і створює обертальний момент, що через кінематичні зв'язки викликає переміщення губок 1 і 2 назустріч одна одній для захоплювання об'єкта 10. При контакті стискальних роликів з деталлю 10 і подальшій роботі приводу 23 нарощується стискальне зусилля (відбувається деформація пружних поверхонь 11 роликів 5 і 6) до мінімального (заздалегідь заданого) значення, величина якого визначається величиною інтервалу між контактними поверхнями контактів 13 і 14. При цьому вісь 8 ролика 6 виходить із заглиблення 22, що призводить до зміщення штока 17 з рухливим контактом 13. В момент спрацьовування другого датчика зусилля вихідний сигнал Uвих.39 джерела напруги 39 через замкнутий восьмий ключ 40 подається на вхід першого формувача сигналу 37 з характеристикою 0, якщо Uвх.37 0 Uвих .37 . 1 якщо Uвх.37 Uвих .39 , При необхідності інтервал між контактами 13 і 14 можна змінювати шляхом зміни положення регулювального гвинта 21. Поява на виході першого формувача 37 сигналу Uвих.37=1 приводить до замикання першого ключа 28, а також до появи на першому виході блока керування 24 командного сигналу на виконання спробного руху адаптивного захватного пристрою інтелектуального робота на підйом об'єкта 10 догори. Одночасно дев'ятий ключ 42 замикається, контакти 13 і 14 при цьому шунтуються, і продовжується нарощування стискального зусилля губок 1 і 2 за допомогою приводу 23. Коли сили тертя, що виникають між покриттями 11 стискальних роликів і об'єктом 10, перевищують протидіючу силу пружних елементів 9 відбувається зсув стискальних роликів 5 і 6 щодо стискальних губок 1 і 2. Це приводить до зміни сигналу на виході датчика зусилля 12. Вихідний сигнал датчика 12 U(t) подається одночасно на вхід блоку затримки 25, на виході якого в процесі захоплювання об'єкта 10 формується сигнал U(t- ), де - час затримки, і на інвертований вхід першого суматора 26. На прямий вхід першого суматора 26 при цьому поступає сигнал U(t- ). При зміні сигналу U(t) на виході першого суматора 26 з'являється сигнал U(t)=U(t- )-U(t), що приводить до спрацьовування другого формувача 27 з характеристикою 9 0, якщо U( t ) 0 . 1 якщо U( t ) 0 , При цьому розмикаються другий 34 і четвертий 33 ключі і замикається третій ключ 29. Одночасно відключається живлення від приводу 23, а вихідний сигнал Uвих.39 джерела напруги 39 надходить до входу третього формувача сигналу 32 з характеристикою 0, якщо Uвх.32 0 Uвих .32 . 1 якщо Uвх.32 Uвих .39 , Uвих .27 Третій формувач сигналу 32 при цьому замикає п'ятий ключ 31. Таким чином, у момент спрацьовування першого датчика стискального зусилля 12 при виникненні зсуву губок 1 і 2 щодо роликів 5 і 6 припиняється стиснення губок 1 і 2, тому що привід 23 відключається, а забезпечується лише рух адаптивного захватного пристрою догори (шляхом керування механічною рукою інтелектуального робота). При цьому виконання напрямних 3 і 4 у вигляді прорізів, розміщених під кутом до подовжньої осі конструкції, приводить до того, що в міру підйому адаптивного захватного пристрою інтелектуального робота стискальні ролики 5 і 6 зміщуються вниз (фіг.1) щодо губок 1 і 2, нарощуючи при цьому стискальне зусилля. Цей процес відбувається до тих пір, поки стискальне зусилля стискальних роликів 5 і 6 не забезпечить утримання і надійний підйом об'єкта 10. Величина стискального зусилля формується в залежності від маси об'єкта 10. При зсуві роликів 5 і 6 щодо губок 1 і 2 в момент спрацьовування першого датчика 12 контакти 13 і 14 другого датчика розмикаються, не змінюючи при цьому режиму роботи блоку керування 24, оскільки контакти 13 і 14 будуть при цьому зашунтовані замкнутим дев'ятим ключем 42. Ролики 5 і 6 у зміщеному положенні показані на фіг.1 (штриховою лінією) і на фіг.3. Переміщення роликів 5 і 6 у пазах 3 і 4 губок 1 і 2 припиняється після здійснення "самозатиску" об'єкта 10, а на виході датчика стискального зусилля 12, як і на другому виході блоку керування 23, формуються сигнали, що відповідають величині стискального зусилля чи величині маси об'єкта 10. Оскільки вихідний сигнал першого датчика стискального зусилля 12 при цьому не змінюється, то на виході першого суматора 26 встановлюється сигнал нульового рівня, а отже, на виході другого формувача сигналу 27 з'являється сигнал Uвих.27=0. Це одночасно приводить до: а) розмикання третього ключа 29, але робота блока керування 24 не порушується, тому що третій ключ 29 зашунтовано п'ятим ключем 31, що знаходиться в замкнутому стані; б) замикання другого ключа 34, однак привід 23 не одержує живлення, тому що одночасно з замиканням другого ключа 34 розмикається шостий ключ 35 (див. наступний пункт); в) замикання четвертого ключа 33, вихідний сигнал Uвих.33 якого при цьому розмикає шостий 35 і сьомий 38 ключі. У результаті на першому виході блока керування 24 встановлюється сигнал нульового рівня, що припиняє спробний рух адаптивного захватного пристрою і свідчить про створення адаптивним 14569 10 захватним пристроєм інтелектуального робота необхідного значення стискального зусилля. У той же час на третьому виході блока керування 24 з'являється сигнал Uвих.32=1, що являє собою команду на виконання роботом запланованих маніпуляційних операцій з об'єктом 10. При появленні на першому виході блока керування 24 сигналу нульового рівня дев'ятий ключ 42 розмикається, перший формувач 37 втрачає живлення, переводячи при цьому перший ключ 28 у розімкнутий стан, а отже і всі елементи блока керування 24 - у первинний стан. Якщо в процесі виконання маніпуляційних операцій з об'єктом 10 його маса збільшується (ємність, у яку доливається рідина чи додається сипучий матеріал), то адаптивний захватний пристрій, працюючи автоматично, без будь-яких зовнішніх команд забезпечує нарощування стискального зусилля до необхідної величини, а на другому виході блоку керування 24 при цьому формується сигнал, за допомогою якого можна оцінити масу об'єкта 10. Цей сигнал можна використовувати для ідентифікації (розпізнавання) об'єктів 10, які відрізняються за масою, що дуже важливо при виконанні інтелектуальним роботом складальних чи сортувальних операцій з попередньою ідентифікацією об'єктів. Для вивільнення об'єкта 10 із адаптивного захватного пристрою інтелектуального робота на перший вхід блоку керування 24 подається сигнал, по якому привід 23 забезпечує розстискання губок 1 і 2. Одночасно четвертий формувач сигналу 41 з характеристикою 0, якщо Uвх.41 0 Uвих .41 1 якщо Uвх.41 0 , розмикає восьмий ключ 40, не допускаючи помилкового спрацьовування другого датчика зусилля (замикання контактів 13 і 14) при переміщенні стискальних роликів 5 і 6 під дією пружних елементів 9 у первинний стан. Після вивільнення об'єкта 10 з адаптивного захватного пристрою інтелектуального робота привід 23 знеструмлюється (через перший вхід блока керування 24), восьмий ключ 40 замикається й адаптивний захватний пристрій переводиться до первинного стану. Позитивний ефект проявляється в тому, що в порівнянні з адаптивним захватним пристроєм інтелектуального робота за а.с. СРСР №1373565 даний пристрій має більш просте конструктивне виконання, оскільки кожен палець адаптивного захватного пристрою складається тільки з двох частин: губки і рухливого елементу - ролика. Виконання напрямних пазів у вигляді прорізів у губках значно підвищує технологічність виготовлення з'єднання "проріз-вісь" у порівнянні з з'єднанням "паз-виступ" у прототипі. Підвищення надійності за рахунок зменшення рухливих частин кожного пальця, за рахунок використання з'єднання типу "проріз-вісь" і за рахунок короткочасного включення в роботу контактів другого датчика зусилля приблизно в 2 рази підвищує довговічність роботи адаптивного захватного пристрою інтелектуального робота в порівнянні з найближчим аналогом. 11 Комп’ютерна верстка А. Рябко 14569 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive gripping device of intellectual robot
Автори англійськоюKondratenko Yurii Panteliiovych, Shvets' Eduard Anatoliiovych
Назва патенту російськоюАдаптивное захватное устройство интеллектуального робота
Автори російськоюКондратенко Юрий Пантелеевич, Швец Эдуард Анатольевич
МПК / Мітки
МПК: B25J 15/00
Мітки: інтелектуального, пристрій, адаптивний, робота, захватний
Код посилання
<a href="https://ua.patents.su/6-14569-adaptivnijj-zakhvatnijj-pristrijj-intelektualnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Адаптивний захватний пристрій інтелектуального робота</a>
Адаптивний логічний пристрій
Номер патенту: 60508
Опубліковано: 15.10.2003
Автор: Кучмієв Володимир Гавриїлович
МПК: G06F 7/00
Мітки: пристрій, логічний, адаптивний
Формула / Реферат:
Адаптивний логічний пристрій, що має п'ять входів пристрою, вихід пристрою, два елементи І, елемент АБО, мультиплексор, причому п'ятий вхід пристрою з'єднаний з першим входом першого елемента І, який відрізняється тим, що перший вхід пристрою з'єднаний з першим адресним входом мультиплексора, другий вхід пристрою з'єднаний з другим адресним входом мультиплексора, третій вхід пристрою з'єднаний з першим входом другого елемента І, четвертий...
Адаптивний корелятор
Номер патенту: 56002
Опубліковано: 15.04.2003
Автори: Рожанківський Ігор Володимирович, Погрібний Володимир Олександрович, Грень Ярослав Володимирович
МПК: G06F 17/15
Мітки: адаптивний, корелятор
Формула / Реферат:
Адаптивний корелятор, що містить перший та другий акумулятори, перший та другий субтрактори, перший та другий компаратори, блок керування та Р-канальний процесор, перший канал якого містить помножувач, перший та другий акумулятори, подільник та субтрактор, а кожний з наступних каналів містить регістр зсуву, помножувач, перший, другий та третій акумулятори, подільник та субтрактор, причому інформаційний вхід першого акумулятора з'єднаний з...
Пристрій для виміру електричної ємності хімічних джерел струму
Номер патенту: 70359
Опубліковано: 15.10.2004
Автори: Косюк Віктор Іванович, Косюк Андрій Вікторович
МПК: H01M 10/48, H01M 10/44, H02J 7/00, G01R 31/36
Мітки: струму, ємності, виміру, пристрій, джерел, хімічних, електричної
Формула / Реферат:
Пристрій для вимірювання електричної ємності хімічних джерел струму, що реалізує алгоритм:,де Qел - електрична ємність джерела струму, що вимірюється, А*год;С - ємність конденсатора, що заряджається, Ф;U - напруга на джерелі струму, що вимірюється, В;tзар - час заряду конденсатора від джерела струму, що вимірюється, с;k -...
Адаптивний пристрій обробки радіосигналів нвч-діапазону
Номер патенту: 67080
Опубліковано: 15.06.2004
Автори: Пашков Дмитро Павлович, Жихарев Володимир Яковлевич, Корольова Наталія Анатоліївна, Козелкова Марина Борисівна
МПК: H04B 7/165
Мітки: радіосигналів, обробки, адаптивний, пристрій, нвч-діапазону
Формула / Реферат:
1. Адаптивний пристрій обробки радіосигналів надвисокочастотного діапазону, що містить перемножувач, інтегратор, лінію затримки на такт, блок визначення знака вхідної величини, формувач опорного коливання, причому з'єднані між собою сигнальний вхід перемножувача, вхід лінії затримки на такт і вхід формувача опорного коливання є входом пристрою, вихід перемножувача з'єднаний із входом блока визначення знака вхідної величини, вихід блока...
Пристрій для вимірювання швидкості та температури потоку
Номер патенту: 30477
Опубліковано: 15.11.2000
Автори: Івахів Орест Васильович, Шигера Ігор Юрійович
МПК: G01P 5/10
Мітки: потоку, температури, вимірювання, пристрій, швидкості
Формула / Реферат:
Пристрій для вимірювання швидкості та температури потоку, що містить високостабільний постійний резистор, з'єднаний нижнім виводом через перетворювач швидкості-температури з землею та виходом ключа, вхід керування якого з'єднано з виходом генератора опорної частоти, перший і другий підсилювачі змінного струму, відрізняється тим, що в нього додатково введено джерело змінного струму, джерело постійного струму, диференційний підсилювач,...
Попередній патент: Пластичне протизадирне мастило
Наступний патент: Застосування шламу хімводопідготовки тец з вологістю до 10 %
Випадковий патент: Піротехнічний склад аерозольного білого диму