Кроковий конвеєр
Номер патенту: 15751
Опубліковано: 17.07.2006
Автори: Завірюха Олександр Васильович, Міхеєв Володимир Костянтинович, Єрьомін Константін Владіміровіч, Андрєєв Сергій Олегович
Формула / Реферат
Кроковий конвеєр, що містить встановлену на основі нерухому раму, рухому раму, з’єднану з механізмом підйому та переміщення рухомої рами, який зв'язаний із приводом та містить синхронізуючу тягу, який відрізняється тим, що на нерухомій та рухомій рамі, на відстані одна від одної, встановлені паралельні горизонтальні напрямні таким чином, що відстань між напрямними нерухомої рами перевищує горизонтальний розмір поперечного перерізу напрямних рухомої рами, а механізм підйому та переміщення рухомої рами виконаний у вигляді двох, встановлених паралельно та зв'язаних вказаною синхронізуючою тягою, валів, на яких за допомогою підшипникової опори встановлена рухома рама та кінці яких з’єднані з нерухомою рамою з можливістю обертання зазначених валів, а один з кінців одного з валів з'єднаний з приводом обертання, до того ж кожний кінець кожного із валів містить дві додаткові ділянки з циліндричними поверхнями, а поздовжні осі симетрії кожного вала і двох, належних одному із його кінців, ділянок паралельні і розташовані на відстані між собою, причому вказані ділянки одного кінця кожного вала являють собою дзеркальне відображення ділянок другого кінця вала, крім того, зазначена синхронізуюча тяга виконана з кільцеподібними кінцями, що з’єднані з відповідними циліндричними поверхнями валів, які не з'єднані з рухомою та нерухомою рамами, причому пристрій додатково містить орієнтуючий барабан, встановлений над рухомою рамою таким чином, що його поздовжня вісь симетрії розташована горизонтально і перпендикулярна напрямним рухомої рами.
Текст
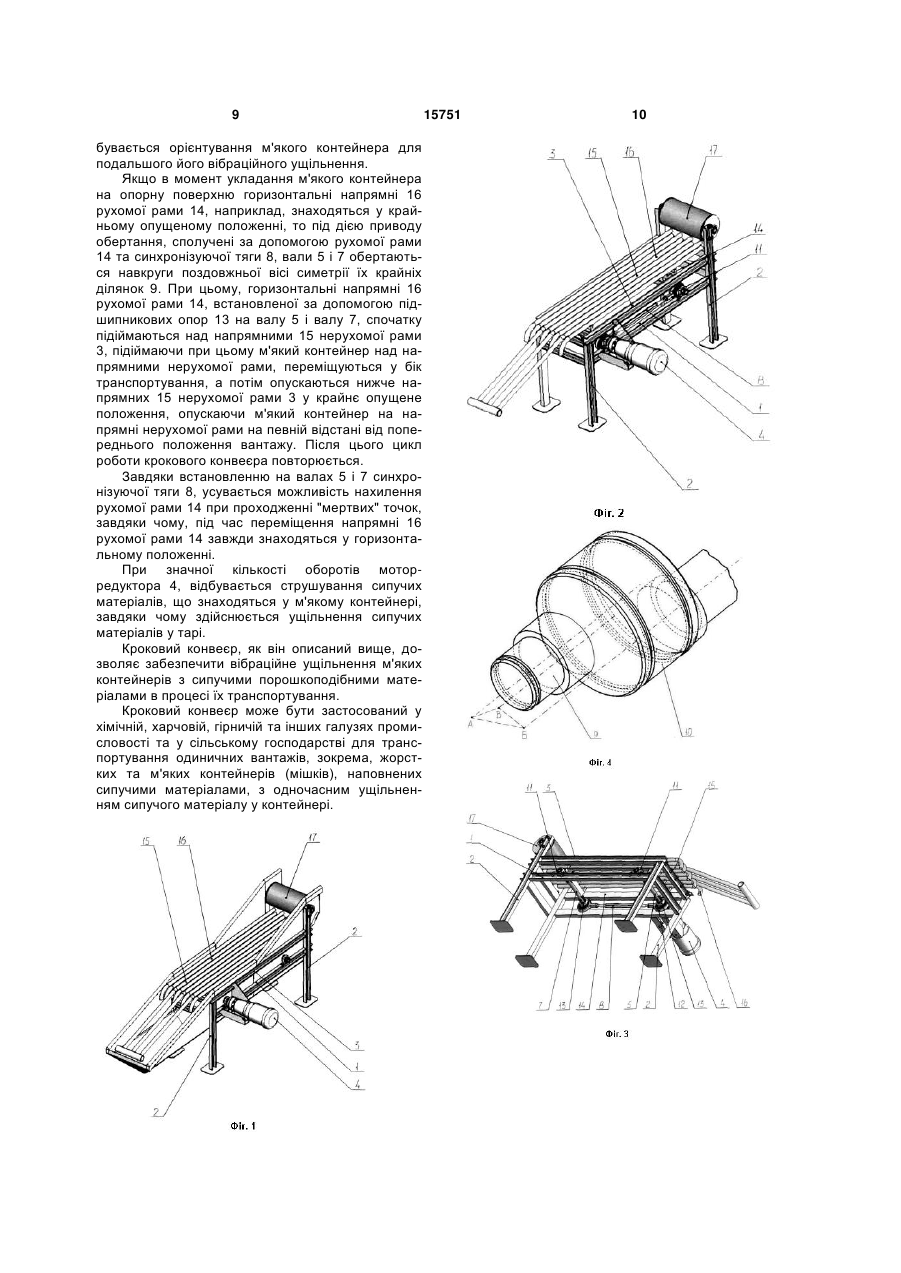
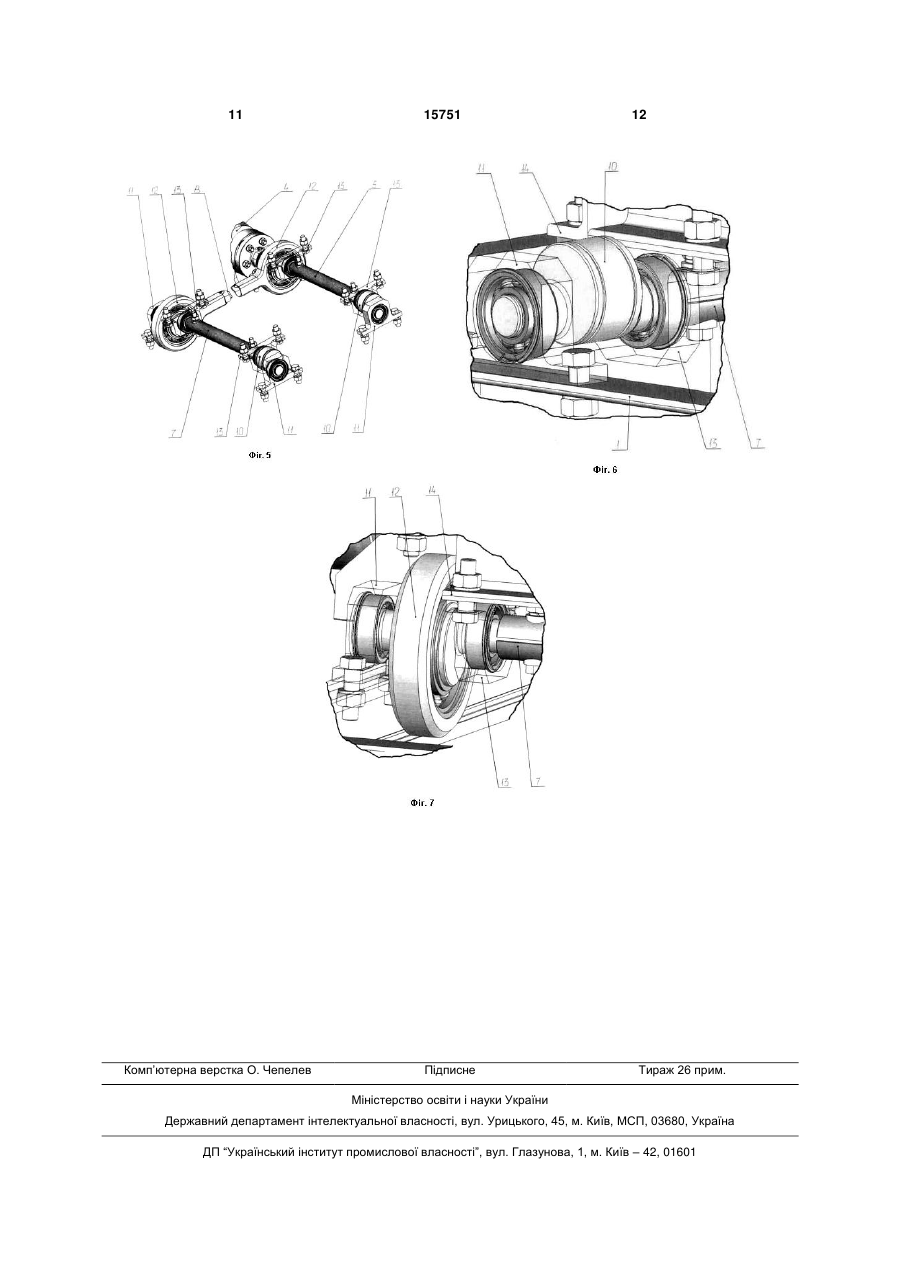
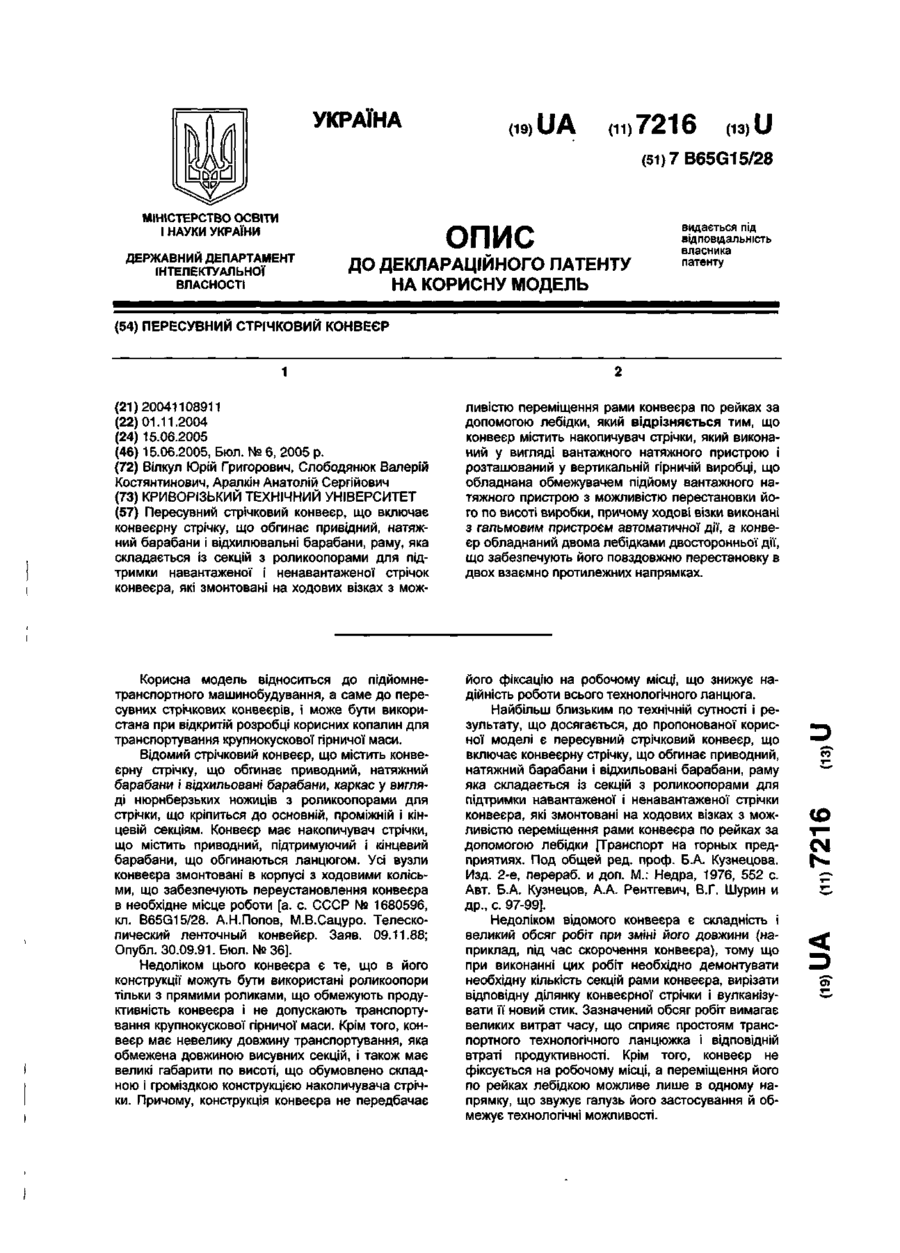
Кроковий конвеєр, що містить встановлену на основі нерухому раму, рухому раму, з’єднану з механізмом підйому та переміщення рухомої рами, який зв'язаний із приводом та містить синхронізуючу тягу, який відрізняється тим, що на нерухомій та рухомій рамі, на відстані одна від одної, встановлені паралельні горизонтальні напрямні таким чином, що відстань між напрямними нерухомої рами перевищує горизонтальний розмір поперечного перерізу напрямних рухомої рами, а механізм підйому та переміщення рухомої рами виконаний у вигляді двох, встановлених парале U 1 3 Як зазначено в описі винаходу, у вихідному положенні вантаж знаходиться на першій носійній опорі, що розташована вище другої опори. Спочатку через трубки (колектор) подають тиск в пружні елементи вертикального переміщення. Під дією тиску кривизна цих пружних елементів змінюється і кінці Їх переміщуються до верху, піднімають закріплені на них трубчасті елементи горизонтального переміщення із закріпленою на них першою носійною опорою. Підіймаючись над другою опорою, перша опора відриває від неї вантаж. Потім через колектор із гнучкими трубками подають тиск в пружні елементи горизонтального переміщення. Кривизна пружних елементів горизонтального переміщення змінюється під дією тиску, і перша опора разом із вантажем переміщується у горизонтальному напрямку на величину кроку h відносно другої носійної опори. Потім знижують тиск у пружних елементах вертикального переміщення і перша опора опускає вантаж на другу опору в іншому місці на відстані h. У цей момент одночасно знижують тиск у пружних елементах горизонтального переміщення, і перша опора повертається у початкове положення. Потім подають тиск в пружні елементи горизонтального переміщення другої опори, тим самим переміщуючи другою опорою вантаж у горизонтальному напрямку на один крок відносно першої опори. Після цього подають тиск в пружні елементи вертикального переміщення і цикл повторюється. Як тільки перша опора піднімає вантаж, переміщений на відстань 2h відносно колишнього положення над другою опорою, у цей момент знижують тиск у пружних елементах горизонтального переміщення другої опори і вони повертаються у початкове положення. Описаний пристрій має ряд суттєвих недоліків. Так, наявність декількох приводів зворотнопоступального руху вантажоносіїв, що містять відповідні порожні пружні елементи, суттєво ускладнює конструкцію пристрою та підвищує експлуатаційні витрати. Крім того, застосування порожніх пружних елементів безумовно потребує додаткових витрат на постійне створення тиску. Подача тиску у пружні елементи може відбуватися лише синхронно у певній послідовності, та потребує додаткових витрат часу. Обов'язкова синхронність дії пружних елементів суттєво знижує надійність пристрою, порушення вказаної синхронності відразу призведе до зупинки переміщення вантажу та може призвести до пошкодження чи руйнування конструктивних елементів самого пристрою. Описаний пристрій, у разі збільшення швидкості руху носійних опор, може забезпечити вібраційне ущільнення м'яких контейнерів з сипучими порошкоподібними матеріалами, однак, з урахуванням необхідності забезпечення синхронної дії пружних елементів, а також загального конструктивного виконання рухомої частини пристрою, застосування описаного пристрою для переміщення вантажів, який являє собою кроковий конвеєр, для ущільнення м'яких контейнерів призведе до зменшення надійності пристрою, його значно швидкого зносу та виходу з ладу. 15751 4 Крім того, відомий кроковий конвеєр (Патент Російської Федерації № 2193515, МПК В 65 G 25/04, дата публікації 27.11.2002). Згідно із описом до вказаного патенту, кроковий конвеєр містить плоский лінійний асинхронний двигун, що складається з індукторів, встановлених жорстко на основі, і ротора, що одночасно є жорстким транспортуючим елементом. Останній складається з пластин та листа. Перша пластина виконана з металу, що має високу електропровідність (алюміній, мідь), друга пластина - з феромагнітного металу, а лист, прикріплений до другої пластини і звернений до вантажу, що транспортується, виконаний з матеріалу з високими фрикційними властивостями. Транспортуючий елемент з боку напрямку транспортування та з протилежного боку жорстко з'єднаний з пружними елементами, закріпленими, у свою чергу, на основі. Ролики, встановлені на штангах з пружними елементами, розташовують транспортуючий елемент паралельно до нерухомої рами та індукторів. Штанги встановлені в отворах основи перпендикулярно до транспортуючого елемента. При вільному стані пружних елементів лист транспортуючою поверхнею виступає над поверхнею нерухомої рами. Транспортуючий елемент може обмежено переміщатися на пружних елементах перпендикулярно, а на роликах паралельно робочій поверхні індукторів. Індуктори підключені до джерела змінного струму через блок керування. Вантаж, що транспортується, розташований на транспортуючому елементі, причому ширина останнього менше ширини вантажу. Як зазначено в описі до патенту, блок керування підключає індуктори до джерела змінного струму. Індуктори створюють електромагнітне поле, яке прикладають до пластини транспортуючого елемента, в результаті чого останній, стискаючи пружні елементи, притягується до робочої поверхні індукторів. В результаті цього, в деякий момент вантаж, що транспортується, лягає на нерухому раму. Потім електромагнітне поле, спрямоване уздовж пластини, спонукає у ній електрорушійну силу й електричний струм. При взаємодії електромагнітного поля і електричного струму виникає електромагнітна сила, що приводить транспортуючий елемент у рух на роликах у напрямку електромагнітного поля, наприклад убік пружного елемента. При цьому перший пружний елемент стискається, а другий елемент розтягується. Після відключення блоком керування індукторів від джерела змінного струму електромагнітні сили зникають, потенційна енергія пружних елементів повертається транспортуючому елементові. Під дією попередньо стиснутих пружних елементів транспортуючий елемент піднімається і піднімає вантаж, що транспортується, над нерухомою рамою. Потім під дією пружних елементів на роликах транспортуючий елемент разом з вантажем переміщується убік транспортування. Створення електромагнітного поля індукторів, необхідного як для притягання транспортуючого елемента до робочої поверхні індукторів, так і для створення електрорушійної сили, що приводить транспортуючий елемент у рух на роликах, призведе до значних витрат електроенергії. Крім того, 5 робота крокуючого конвеєра, а саме вертикальне та горизонтальне переміщення транспортуючого елемента, може відбуватися лише поетапно, у певній послідовності, та потребує додаткових витрат часу. Описаний пристрій, у разі збільшення швидкості руху транспортуючого елемента, може забезпечити вібраційне ущільнення м'яких контейнерів з сипучими порошкоподібними матеріалами, однак, з урахуванням загального конструктивного виконання рухомої частини пристрою та способу його роботи, застосування описаного пристрою для переміщення вантажів, який являє собою кроковий конвеєр, для ущільнення м'яких контейнерів призведе до зменшення надійності пристрою, значно швидкого зносу виробу та до суттєвого підвищення, і без того значних, витрат електроенергії. Найбільш близьким за технічною суттю до крокового конвеєра, що заявляється, та обраним за найбільш близький аналог є кроковий конвеєр за патентом України № 9573 (МПК В 65 G 25/08, дата публікації 17.10.2005). Згідно з описом до вказаного патенту, кроковий конвеєр містить нерухому раму, виконану у вигляді зварених плит, які закріплені на фундаменті, рухому носійну раму, виконану у вигляді зварної металоконструкції, яка встановлена між плитами нерухомої рами та одноплечові важелі, шарнірно встановлені одним боком на фундаменті, а другим боком взаємно поєднані опорними і фіксуючими роликами з рухомою носійною рамою, при цьому опорні ролики встановлені на осях важелів, а фіксуючі ролики встановлені на осях кронштейнів, шарнірно закріплених на осях важелів. Важелі зв'язані між собою тягами, які регулюються гайками. Привод підйому є перший гідроциліндр, а привід переміщення - другий гідроциліндр. Як зазначено в описі до патенту, спочатку одноплечові важелі знаходяться в крайньому похилому положенні, при цьому рухома носійна рама знаходиться в зоні приймання вантажу з першої позиції у крайньому опущеному положенні. Вантаж за допомогою окремих транспортних засобів встановлюється на першу позицію нерухомої рами. Під дією першого гідроциліндра важелі повертаються навколо шарніра і установлюються у вертикальному положенні, піднімаючи носійну раму, яка спирається на опорні ролики важелів, у крайнє верхнє положення. При цьому рухома носійна рама підхоплює вантаж і трохи піднімає його вище рівня нерухомої рами. Далі під дією другого гідроциліндра рухома носійна рама з вантажем переміщується на встановлений крок на опорних роликах важелів. Потім під дією першого гідроциліндра важелі обертаються навколо осі і установлюються у крайньому нахиленому положенні, опускаючи при цьому рухому носійну раму нижче рівня нерухомої рами та встановлюючи таким чином вантаж на другу позицію нерухомої рами. Далі під дією гідроциліндра рухома носійна рама повертається у початкове положення, перемішуючись на опорних роликах важелів. Після цього цикл роботи конвеєра повторюється, переміщуючи вантажі з однієї позиції на другу через інтервали часу, які відповідають ритму технологічного процесу. 15751 6 Отже, наявність двох приводів (у вигляді двох гідроциліндрів) зворотно-поступального руху рухомої рами - в площині напрямку транспортування та у площині, що перпендикулярна останній, суттєво ускладнює конструкцію пристрою та підвищує експлуатаційні витрати. Крім того, застосування гідроциліндрів безумовно потребує додаткових витрат на створення в них тиску. Робота гідроциліндрів, як і елементів механізму підйому та переміщення рухомої рами, може відбуватися лише синхронно у певній послідовності та потребує додаткових витрат часу. Обов'язкова синхронність дії гідроциліндрів суттєво знижує надійність пристрою. Описаний пристрій, у разі збільшення швидкості руху рухомої рами, може забезпечити вібраційне ущільнення м'яких контейнерів з сипучими порошкоподібними матеріалами, однак, з урахуванням необхідності забезпечення синхронної дії гідроциліндрів, а також загального конструктивного виконання рухомої частини пристрою, застосування описаного пристрою для переміщення вантажів, який являє собою кроковий конвеєр, для ущільнення м'яких контейнерів призведе до зменшення надійності пристрою та до значно швидкого зносу виробу. З урахуванням вищезазначеного, ознаками найбільш близького аналога, що збігаються з суттєвими ознаками запропонованої корисної моделі, є встановлена на основі нерухома рама, рухома рама, поєднана з механізмом підйому та переміщення рухомої рами, який пов'язаний з приводом та містить синхронізуючу тягу. В основу корисної моделі поставлено задачу створення крокового конвеєра з можливістю забезпечення вібраційного ущільнення м'яких контейнерів з сипучими порошкоподібними матеріалами в процесі їх транспортування. Поставлена задача вирішена за рахунок того, що у кроковому конвеєрі, що містить встановлену на основі нерухому раму, рухому раму, поєднану з механізмом підйому та переміщення рухомої рами, який пов'язаний із приводом та містить синхронізуючу тягу, відповідно до корисної моделі, на нерухомій та рухомій рамі, на відстані одна від одної, встановлені паралельні горизонтальні напрямні таким чином, що відстань між напрямними нерухомої рами перевищує горизонтальний розмір поперечного перетину напрямних рухомої рами, а механізм підйому та переміщення рухомої рами виконаний у вигляді двох, встановлених паралельно та пов'язаних вказаною синхронізуючою тягою, валів, на яких за допомогою підшипникової опори встановлена рухома рама та кінці яких поєднані з нерухомою рамою з можливістю обертання зазначених валів, а один з кінців одного з валів з'єднаний з приводом обертання, до того ж, кожний кінець кожного із валів містить дві додаткові ділянки з циліндричними поверхнями, а поздовжні вісі симетрії кожного валу і двох, приналежних одному із його кінців, ділянок паралельні і розташовані на відстані між собою, при цьому, вказані ділянки одного кінця кожного валу являють собою дзеркальне відображення ділянок другого кінця валу, крім того, зазначена синхронізуюча тяга виконана з кільцеподібними кінцями, що поєднані з 7 відповідними циліндричними поверхнями валів, які не поєднані з рухомою та нерухомою рамами, при цьому, пристрій додатково містить орієнтуючий барабан, встановлений над рухомою рамою таким чином, що його поздовжня вісь симетрії розташована горизонтально і перпендикулярна напрямним рухомої рами. Саме ці ознаки необхідні і достатні для вирішення поставленого завдання. Встановлення на нерухомій та рухомій рамі, на відстані одна від одної, паралельних горизонтальних напрямних таким чином, що відстань між напрямними нерухомої рами перевищує горизонтальний розмір поперечного перетину напрямних рухомої рами, призводить до утворення опорної поверхні нерухомої рами та носійної опорної поверхні рухомої рами, які, виходячи із свого конструктивного виконання, забезпечуватимуть необхідне вібраційне ущільнення м'яких контейнерів під час транспортування. Виконання механізму підйому та переміщення рухомої рами у вигляді двох, встановлених паралельно та пов'язаних вказаною синхронізуючою тягою, валів, на яких за допомогою підшипникової опори встановлена рухома рама, поєднання кінців валів з нерухомою рамою з можливістю обертання зазначених валів, з'єднання одного з кінців одного валу з приводом обертання, виконання кожного кінця кожного з валів з двома додатковими ділянками з циліндричними поверхнями, те, що поздовжні осі симетрії кожного валу і двох, приналежних одному з його кінців, ділянок паралельні і розташовані на відстані між собою, а також те, що вказані ділянки одного кінця кожного валу являють собою дзеркальне відображення ділянок другого кінця валу, виконання синхронізуючої тяги з кільцеподібними кінцями, що поєднані з відповідними циліндричними поверхнями валів, які не поєднані з рухомою та нерухомою рамами, забезпечує надійність рухомої частини пристрою при значної швидкості руху рухомої рами, тобто, у вібраційному режимі роботи пристрою. Введення у пристрій орієнтуючого барабану, встановленого над рухомою рамою таким чином, що його поздовжня вісь симетрії розташована горизонтально і перпендикулярна напрямним рухомої рами, забезпечує необхідне орієнтування м'яких контейнерів на паралельних горизонтальних напрямних для здійснення вібраційного ущільнення під час транспортування. Суть корисної моделі пояснюється кресленнями, де зображено на: Фіг.1 - загальний вигляд крокового конвеєра; Фіг.2 - загальний вигляд крокового конвеєра без корпуса; Фіг.3 - вигляд знизу крокового конвеєра без корпуса; Фіг.4 - схема розташування осей кінця валу; Фіг.5 - механізм підйому та переміщення рухомої рами; Фіг.6 - кінець валу; Фіг.7 - кінець валу, поєднаний з синхронізуючою тягою. Один з можливих варіантів виконання крокового конвеєра складається із встановленої на основі 15751 8 1 за допомогою вертикальних опор 2 нерухомої рами 3, виконаної у вигляді поперечних та поздовжніх жорстких елементів. На основі 1 закріплений мотор-редуктор 4 (привід обертання), вал якого з'єднаний з кінцем ведучого валу 5 механізму 6 підйому та переміщення рухомої рами. Механізм 6 підйому та переміщення рухомої рами складається з ведучого валу 5, паралельно встановленого йому веденого валу 7, синхронізуючої тяги 8. Кожний кінець валу 5 і валу 7 містить ділянку 9 і 10, які мають циліндричні поверхні. Поздовжні осі симетрії кожного валу і приналежних одному із його кінців циліндричних ділянок 9 і 10 паралельні та розташовані на відстані між собою. При цьому, у конкретному варіанті виконання вони можуть лежати у різних площинах, таким чином, що у поперечному перетині утворюють вершини умовного трикутника АБВ. До того ж, вказані ділянки 9, 10 одного кінця валу являють собою дзеркальне відображення ділянок 9, 10 другого кінця валу. Циліндричні ділянки 9 кінців валу 5 і валу 7 за допомогою підшипникових опор 11 поєднані з основою 1. Циліндрична поверхня ділянки 10 одного з кінців валу 5, за допомогою підшипників та кільцеподібних кінців 12 синхронізуючої тяги 8, поєднана з відповідною циліндричною поверхнею 10 одного з кінців валу 7. На основних (центральних) частинах валу 5 і валу 7, за допомогою підшипникових опор 13, встановлена рухома рама 14. На нерухомій рамі 3 та рухомій рамі 14, на відстані одна від одної, встановлені паралельні горизонтальні напрямні 15 і напрямні 16 відповідно таким чином, що відстань між напрямними нерухомої рами 3 перевищує горизонтальний розмір поперечного перетину напрямних рухомої рами 14. Зазначені напрямні 15 нерухомої рами 3, що розташовані в одній площині, та напрямні 16 рухомої рами 14, які також розташовані у одній площині, утворюють опорні поверхні для вантажу, що транспортується. Над рухомою рамою 14, з боку подачі м'яких контейнерів, що транспортуються, на вертикальних опорах встановлений орієнтуючий барабан 17, його поздовжня вісь симетрії розташована горизонтально і перпендикулярна напрямним 15 і 16. Робота крокового конвеєра здійснюється таким чином. Спочатку запускають мотор-редуктор, який приводить у рух механізм 6 підйому та переміщення рухомої рами. Не залежно від вертикального положення напрямних 16 рухомої рами 14, м'які контейнери опускаються на частину циліндричної поверхні барабану 17, що знаходиться за умовною вертикальною площиною, у якій розташована поздовжня вісь симетрії барабану 17, з боку напрямних 16. При цьому, під дією ваги м'якого контейнера, барабан 17 вільно обертається, завдяки чому м'який контейнер перевертається і лягає на напрямні 15 і/або напрямні 16 стороною або поверхнею, яка має найбільшу площу. Таким чином від 9 бувається орієнтування м'якого контейнера для подальшого його вібраційного ущільнення. Якщо в момент укладання м'якого контейнера на опорну поверхню горизонтальні напрямні 16 рухомої рами 14, наприклад, знаходяться у крайньому опущеному положенні, то під дією приводу обертання, сполучені за допомогою рухомої рами 14 та синхронізуючої тяги 8, вали 5 і 7 обертаються навкруги поздовжньої вісі симетрії їх крайніх ділянок 9. При цьому, горизонтальні напрямні 16 рухомої рами 14, встановленої за допомогою підшипникових опор 13 на валу 5 і валу 7, спочатку підіймаються над напрямними 15 нерухомої рами 3, підіймаючи при цьому м'який контейнер над напрямними нерухомої рами, переміщуються у бік транспортування, а потім опускаються нижче напрямних 15 нерухомої рами 3 у крайнє опущене положення, опускаючи м'який контейнер на напрямні нерухомої рами на певній відстані від попереднього положення вантажу. Після цього цикл роботи крокового конвеєра повторюється. Завдяки встановленню на валах 5 і 7 синхронізуючої тяги 8, усувається можливість нахилення рухомої рами 14 при проходженні "мертвих" точок, завдяки чому, під час переміщення напрямні 16 рухомої рами 14 завжди знаходяться у горизонтальному положенні. При значної кількості оборотів моторредуктора 4, відбувається струшування сипучих матеріалів, що знаходяться у м'якому контейнері, завдяки чому здійснюється ущільнення сипучих матеріалів у тарі. Кроковий конвеєр, як він описаний вище, дозволяє забезпечити вібраційне ущільнення м'яких контейнерів з сипучими порошкоподібними матеріалами в процесі їх транспортування. Кроковий конвеєр може бути застосований у хімічній, харчовій, гірничій та інших галузях промисловості та у сільському господарстві для транспортування одиничних вантажів, зокрема, жорстких та м'яких контейнерів (мішків), наповнених сипучими матеріалами, з одночасним ущільненням сипучого матеріалу у контейнері. 15751 10 11 Комп’ютерна верстка О. Чепелев 15751 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюStep conveyor
Автори англійськоюZaviriukha Oleksandr Vasyliovych
Назва патенту російськоюШаговый конвейер
Автори російськоюЗавирюха Александр Васильевич, Еремин Константин Владимирович
МПК / Мітки
МПК: B65G 25/00
Код посилання
<a href="https://ua.patents.su/6-15751-krokovijj-konveehr.html" target="_blank" rel="follow" title="База патентів України">Кроковий конвеєр</a>
Гвинтовий конвеєр

Номер патенту: 24467
Опубліковано: 21.07.1998
Автор: Мельнік Сергій Михайлович
МПК: B65G 33/14, B65G 33/00
Формула / Реферат:
Гвинтовий конвеєр, що містить завантажувальну і розвантажувальну магістралі, виконані у вигляді кожухів і встановлених в них робочих спіралей шнеків закріплених на привідних валах, які в опорах закріплені в перевантажувальному патрубку, проміжний вал, встановлений паралельно до привідних валів і кінематичне з ними зв'язаний, який відрізняється тим, що привідні вали розташовані в горизонтальній площині, а проміжний вал закріплений на...
Пересувний стрічковий конвеєр
Номер патенту: 7216
Опубліковано: 15.06.2005
Автори: Вілкул Юрій Григорович, Аралкін Анатолій Сергійович, Слободянюк Валерій Костянтинович
МПК: B65G 15/00
Мітки: стрічковій, конвеєр, пересувний
Формула / Реферат:
Пересувний стрічковий конвеєр, що включає конвеєрну стрічку, що обгинає привідний, натяжний барабани і відхилювальні барабани, раму, яка складається із секцій з роликоопорами для підтримки навантаженої і ненавантаженої стрічок конвеєра, які змонтовані на ходових візках з можливістю переміщення рами конвеєра по рейках за допомогою лебідки, який відрізняється тим, що конвеєр містить накопичувач стрічки, який виконаний у вигляді вантажного...
Електромеханічний реверсивний кроковий двигун
Номер патенту: 73219
Опубліковано: 15.06.2005
Автор: Вишневський Людвиг Федорович
МПК: H02K 37/00
Мітки: кроковий, двигун, реверсивний, електромеханічний
Формула / Реферат:
Електромеханічний реверсивний кроковий двигун, що містить вихідний кривошипний вал і нерухомо встановлений у корпусі електромагніт, на осі якоря якого жорстко закріплено кулісу, вилкою якої охоплено цапфу кривошипного вала, який відрізняється тим, що введено аналогічний електромагніт з кулісою, при цьому осі куліс зміщені відносно одна одної так, що куліси утворюють кут від 0° до 180° і з'єднані відповідними пружними зв'язками з корпусом,...
Кільцевий скребковий конвеєр, замкнений в горизонтальній площині
Номер патенту: 844
Опубліковано: 16.07.2001
Автори: Омеляненко Володимир Миколайович, Колесніков Вадим Миколайович, Ситнік Анатолій Володимирович, Косарєв Василь Васильович, Лаптєв Анатолій Григорович, Мізін Вадим Олександрович
МПК: B65G 19/04
Мітки: площині, скребковий, конвеєр, кільцевий, горизонтальний, замкнений
Формула / Реферат:
1. Кільцевий скребковий конвеєр, замкнений в горизонтальній площині, що складається з рами, натяжного пристрою скребкового ланцюга, привода, який включає двигун, редуктор і привідну зірку, який відрізняється тим, що привід жорстко закріплений на кінцевій секції, що установлена з можливістю переміщення відносно рами за допомогою натяжного пристрою, виконаного у вигляді гідроциліндра, закріпленого на рамі уздовж її поздовжньої осі.2....
Кроковий підйомник
Номер патенту: 6094
Опубліковано: 29.12.1994
Автори: Назаренко Віктор Філіпович, Іванов Іван Васильович, Ситник Микола Петрович, Вертійов Сергій Антонович
Формула / Реферат:
1. Шаговый подъемник, содержащий раму с направляющими, подъемную платформу, закрепленные на раме гидроцилиндры, на штоках которых закреплена траверса для взаимодействия с платформой, секции для установки на платформу, имеющие элементы фиксации между собой, и шарнирно закрепленную на одной из секций опорную пяту, отличающийся тем, что, с целью расширения его технологических возможностей путем уменьшения габаритов в исходном положении,...
Попередній патент: Спосіб трансплантації стромальних стовбурових клітин на багатокомпонентному тримірному носії для заміщення тангенціальних дефектів кісток кінцівок
Наступний патент: Тринога для утримування стояка горизонтальної опалубки
Випадковий патент: Спосіб лікування хворих на хронічний гепатит с