Блок датчиків положення штурвалу літака
Номер патенту: 16306
Опубліковано: 29.08.1997
Автори: Кригін Юрій Максимович, Русаков Вадим Євгенійович, Маслов Валентин Тимофійович, Войтко Олексій Федорович
Формула / Реферат
Блок датчиков положення штурвала самолета, содержащий входной вал с жестко закрепленным на нем приводным элементом, выходные валы, на каждом из которых установлены зубчатое колесо и ограничитель поворота, отличающийся тем, что, с целью повышения надежности работы блока, зубчатые колеса и ограничители поворота жестко закреплены на выходных валах, приводной элемент выполнен в виде разнесенных вдоль оси входного вала двух зубчатых и двух цилиндрических секторов, взаимодействующих с соответствующими зубчатыми колесами и ограничителями поворота, каждый из которых выполнен в виде двух упоров с цилиндрической рабочей поверхностью, концентричной поверхности сопрягаемого с ним цилиндрического сектора, причем центральный угол между упорами равен полному рабочему ходу соответствующего выходного вала.
Текст
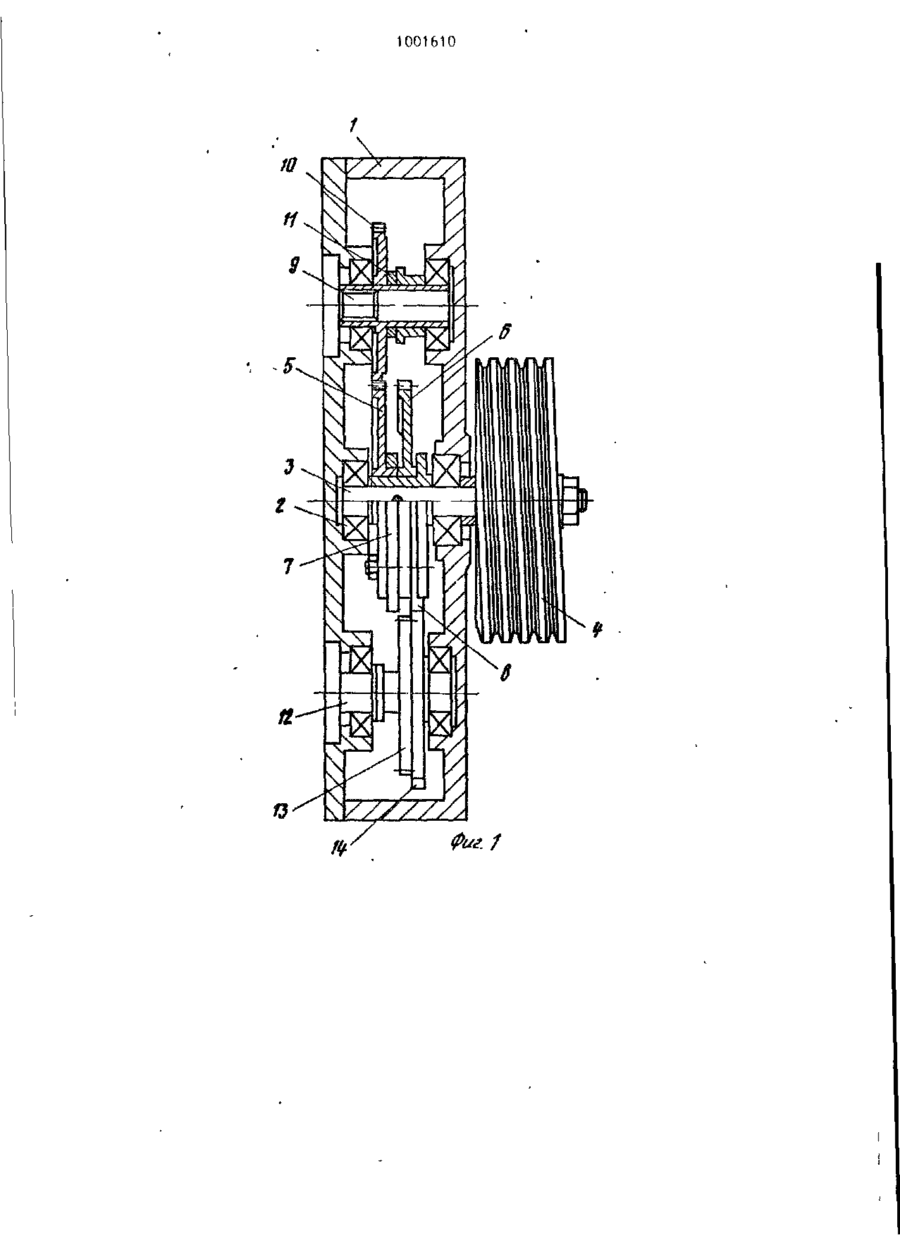
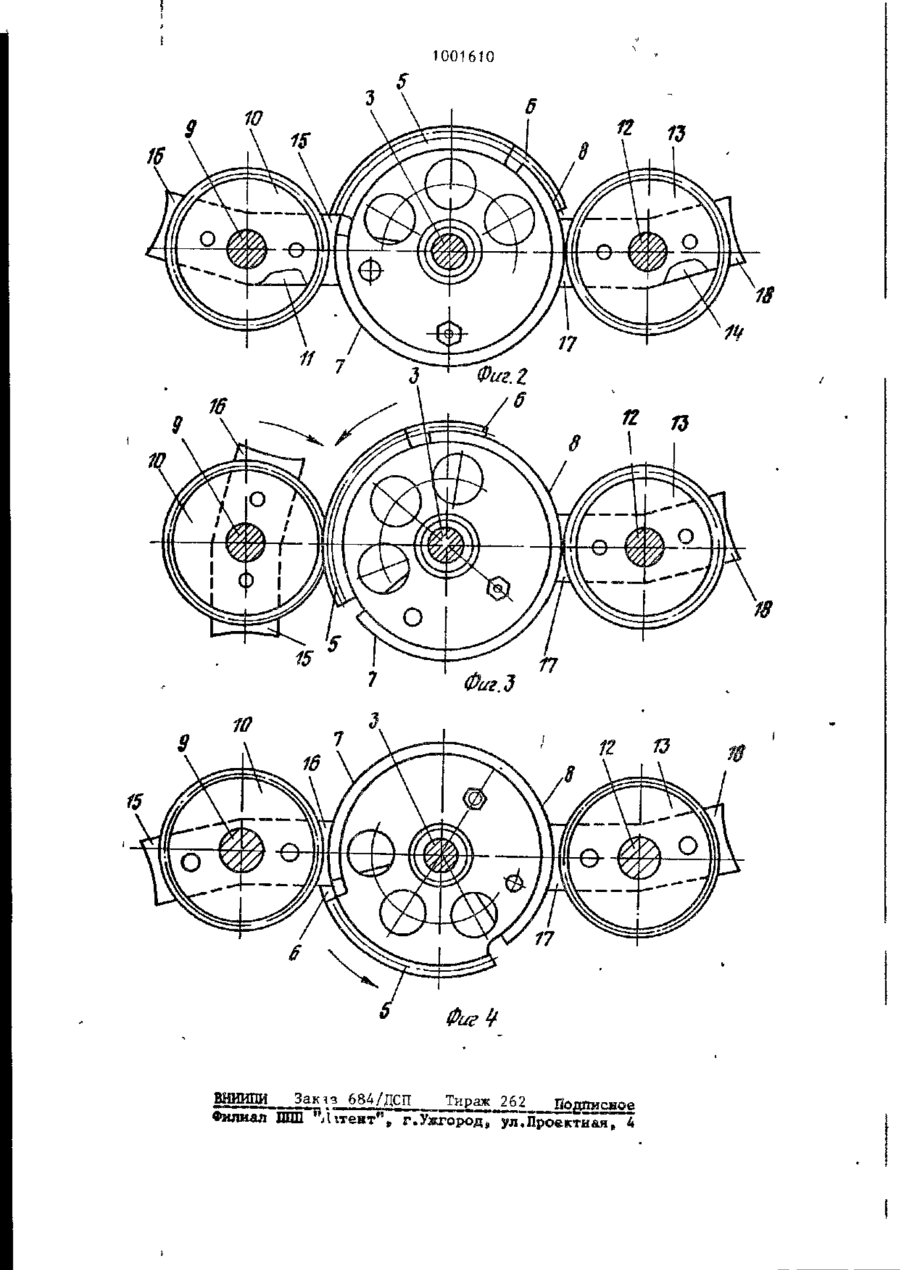
БЛОК ДАТЧИКОВ П Л Ж Н Я ОО Е И Ш У В Л САМОЛЕТА, содержащий входТРАА ной вал с жестко закрепленным на нем приводным элементом, выходные валы, на каждом из которых установлены зубчатое колесо и ограничитель поворота, о т л и ч а ю щ и й с я тем, что, с целью повышения надежності_ работы блока, зубчатые колеса и ограничители поворота жестко закреплены на выходных в ш а х , приводной . элемент выполнен в виде разнесенных вдоль оси входного вала двух зубчатых и двух цилиндрических секторов, , взаимодействующих с соответствующими зубчатыми колесами и ограничителями поворота, каждый из которых выполнен в виде двух упоров с цилиндрической рабочей поверхностью, концентричной поверхности сопрягаемого с ним цилиндрического сектора, причем центральный угол между упорами равен полному рабочему ходу соответствующего выходного вала. 1 1 1001 610 штурвала. На его входном валу жестко Изобретение относится к конструкзакреплен барабан, связанный с помоции устройстз для управления летатепь щью тросовой проводки со штурвалом. ным аппаратом, в частности к устройУстройство содержит приводной элествам задающих и управляющих элементов дистанционных систем управления , мент, выполненный в виде зубчатого колеса, жестко закрепленного на входорганами летательного аппарата с прином валу, и управляющие механизмы, водом от штурвала или ручки управлерасположенные симметрично по обе стония самолетом, и может быть использороны от входного вала, каждый управвано в системах поперечного управления летательных аппаратов, например !0 ляющий механизм выполнен в виде шестерни, взаимодействующей с приводным для управления интерцепторами, рабозубчатым колесом, и подпружиненного тающими в элеронном режиме. выходного вала, причем шестерня и Известна система управления интер выходной вал установлены в корпусе цепторами-элеронами, содержащая корсоосно. їїа Шестернях выполнены торцопус с установленным в нем входным !5 вые выступы, а на выходных валах-равалом, механически связанным провоцдиальные выступы. Кроме того, устройкой управления со штурвалом, приводство имеет ограничители поворота выной элемент и управляющие механизмы. ходных валов, выполненные на корпусе Приводной элемент выполнен в виде кулачка, закрепленного на входном ва-, 0 в виде упоров, взаимодействующих с радиальными выступами выходных валов, лу и имеющего две рабочие поверхноскоторые при помощи шлицев связаны ти, одна из которых выполнена дугой с задающими устройствами электро-дисокружности, а другая определенным танционной системы управления интеробразом спрофилирована. Управляющие механизмы расположены симметрично ,- цепторами-элеронами С 2 3 относительно оси кулачка и каждый Недостатком известного устройства из них выполнен в виде подпружиненявляется низкая надежность его рабоной качалки с роликом, взаимодействуты, обусловленная отсутствием посющим с соответствующей поверхностою тоянной механической связки между кулачка. Подпружиненные качалки уст элементами устройства, а также изменеройства через систему тяг связанные 30 нием механических свойств пружин и с входами гидроприводов интерцепторов- тросовой проводки управления в проэлеронов» цессе длительной эксплуатации и приводящая к возможности рассогласования При повороте входного вала в одну положений штурвала самолета и органа из сторон отклоняется та подпружинен35 управления летательным аппаратом. ная качалка, которая своим роликом Целью изобретения является повывзаимодействует с рабочей профилирошение надежности работы устройства. ванной поверхностью задающего кулачка. Ролик другой подпружиненной каУказанная цель достигается тем, чалки обкатывается в это время по поверхности кулачка, выполненной дугой 40 что в блоке датчиков положения штурвала самолета, содержащем входной окружности и вторая качалка остаетвал с жестко закрепленным на нем ся неподвижной [1]. приводным элементом, выходные валы, Указанное устройство представляет на каждом из которых установлены собой сложную систему кинематических звеньев ,что приводит к значительному 45 зубчатое колесо и ограничитель поворота, последние жестко закреплены весу устройства и уменьшению его нана выходных валах, приводной элемент дежности. Кроме того, наличие люфтов выполнен в виде разнесенных вдоль в кинематических звеньях снижает точ оси входного вала двух зубчатых и ность срабатывания устройства и ус50 двух цилиндрических секторов, взаимоловия его регулировки. действующих с соответствующими зубИзвестно наиболее близкое по техничатыми колесами и ограничителями ческой сущности устройство для разповорота, каждый из которых выполнен дельного управления интерцепторамив виде двух упоров с цилиндрической элеронами летательного аппарата. Это устройство служит для привода 5 5 рабочей поверхностью, концентричной поверхности сопрягаемого с ним цизадающих датчиков электродисганционлиндрического сектора, причем центной системы управления интерцепторамиральный угол между упорами равен элеронами в зависимости от положения З 1001 610 полному рабочему ходу соответствующего выходного вала. На фиг. 1 показан предлагаемый блокs общий вид; на фиг. 2-4 - положение элементов блока, соответствую- 5 щее различным положениям штурвала самолета. В корпусе 1 на подшипниках 2 установлен входной вал 3, на котором установлен барабан 4 тросовой провод-JQ ки к штурвалу* На валу 3 жестко установлены зубчатые секторы 5 и 6. Входной вал выполнен с двумя цилиндрическими секторами 7 и 8, которые соосны с валом и имеют выборку, длина кото- t5 рой превышает длину дуги, описанной по вершинам зубьев зубчатых секторов 5 и 6. На выходном валу 9 установлены зубчатое колесо 10 и ограничитель поворота 11, которые взаимо20 действуют с зубчатым сектором 5 и цилиндрическим сектором 7. На выходном валу 12 установлены зубчатое колесо 13 и ограничитель поворота 14, которые взаимодействуют с зубчатым 6 25 и цилиндричесуим сектором 8. Ограничители поворота 11, 14 снабжены упорами 15, 16 и 17, 18 соответственно . Рабочая поверхность упоров 15, 16 и 17, 18 выполнена цилинд30 рической, концентричной поверхностям секторов 7, 8. Упоры 15, 16 и 17, 18 расположены под центральным углом, равным полному рабочему ходу соответствующего выходного вала и связанного с ним задающего датчика электродистанционной системы управления. Блок работает следующим образом. При нейтральном положении штурвала -входной вал 3 и выходные валы 9 и 12 установлены так, что зубчатые секто- 40 ры 5 и 6 находятся вне зацепления с зубчатыми колесами 10 и 13, а ограничители поворота 11 и 14 упорами 15 и 17 контактируют с цилиндрическими секторами 7 и 8, т.е. выходные валы 9 и 12 заторможены. При повороте штурвала поворачивается барабан 4, входной вал 3, зубчатые секторы 5 и 6 и цилиндрические сек 4 торы 7 и 8, причем последние скользят по цилиндрическим поверхностям упоров 15 и 17 ограничителей поворота 11 и 14 до тех пор, пока зубчатый сектор, напрргмер 5, не войдет в зацепление с зубчатым колесом 10. Одновременно упор 15 перестает контактировать с поверхностью сектора 7, так как на ней начинается выборка. Таким образом, выходной вал 9 освобождается и начинает вращаться, поворачивая входное звено задающего элемента электродистанционной системы управления. Выходной вал 12 при этом остается неподвижным, так как зубчатый сектор 6 не взаимодействует с зубчатым колесом 13, а сектор 8 входного вала 3 контактирует с поверхностью упора 17. Таким образом, при повороте штурвала в одно из крайних положений один из выходных валов блока датчиков поворачивается на полный рабочий угол, а другой выходной вал остается неподвижным. Увеличение хода штурвала в результате вытяжки тросовой проводки управления не влияет на величину полного рабочего хода выходного вала, т.к. при этом зубчатый сектор 5 выходит из зацепления с зуб чатым колесом 10, а цилиндрический сектор 7 начинает контактировать с ответной поверхностью упора 16, т.е. выходной вал 9 остается зафиксированным. При повороте штурвала в нейтральное или другое крайнее положение последовательность работы механизма аналогична описанной выше. Предлагаемый блок повышает точность установки входного звена задающего устройства электродистанционной системы в крайних и нейтральном положениях независимо от величины вытяжки троса при эксплуатации, отсутствие пружин в составе блока позволяет снизить усилия на пгурвале. Это улучшает летно-технические характеристики самолета и повышает надежность системы. 1001610 Фиг. 7 1001610 12 эз 684/ДСП _Тиражц262 л _Порписиое Филиал ПШ Літент"» г.Ужгород, ул.ПроектнаЯв 4 1Ъ
ДивитисяДодаткова інформація
Назва патенту англійськоюPosition sensor unit of aircraft steering control
Автори англійськоюRusakov Vadym Yevheniiovych, Voitko Oleksii Fedorovych, Maslov Valentyn Tymofiiovych, Kryhin Yurii Maksymovych
Назва патенту російськоюБлок датчиков положения штурвала самолета
Автори російськоюРусаков Вадим Евгеньевич, Войтко Алексей Федорович, Маслов Валентин Тимофеевич, Крыгин Юрий Максимович
МПК / Мітки
МПК: B64C 13/00
Мітки: датчиків, штурвалу, літака, положення, блок
Код посилання
<a href="https://ua.patents.su/6-16306-blok-datchikiv-polozhennya-shturvalu-litaka.html" target="_blank" rel="follow" title="База патентів України">Блок датчиків положення штурвалу літака</a>
Блок датчиків положення штурвала літака
Номер патенту: 16564
Опубліковано: 29.08.1997
Автори: Русаков Вадим Євгенійович, Штейнберг Григорій Мойсейович, Маслов Валентин Тимофійович, Войтко Олексій Федорович
МПК: B64C 13/00
Мітки: штурвала, літака, положення, датчиків, блок
Формула / Реферат:
Блок датчиков положення штурвала самолета по авт.св. № 1001610, отличающийся тем. что, с целью повышения надежности работы устройства путем исключения заклинивания зубчатых колес выходных валов в момент начала их зацепления с зубчатыми секторами входного вала, он снабжен свободно вращающимися подпружиненными роликами, установленными в корпусе устройства, а на каждом выходном валу выполнены по два профилированных выступа, контактирующих...
Пристрій блокування двох важелів управління систем літака
Номер патенту: 16321
Опубліковано: 29.08.1997
Автори: Поляченко Юхим Абрамович, Снєжков Олександр Дмитрович, Саранча Володимир Петрович
МПК: B64C 13/00
Мітки: двох, літака, систем, управління, блокування, важелів, пристрій
Формула / Реферат:
Устройство блокировки двух рычагов управления систем самолета, установленных на шарнирах с параллельными осями вращения, содержащее ограничители хода рычагов, отличающееся тем, что, с целью упрощения конструкции и снижения массы, ограничители хода рычагов выполнены в виде поворотных планок, жестко соединенных друг с другом под прямым углом, причем ось поворота планок расположена между рычагами управления в плоскости, перпендикулярной осям...
Система управління рульовими поверхнями літака
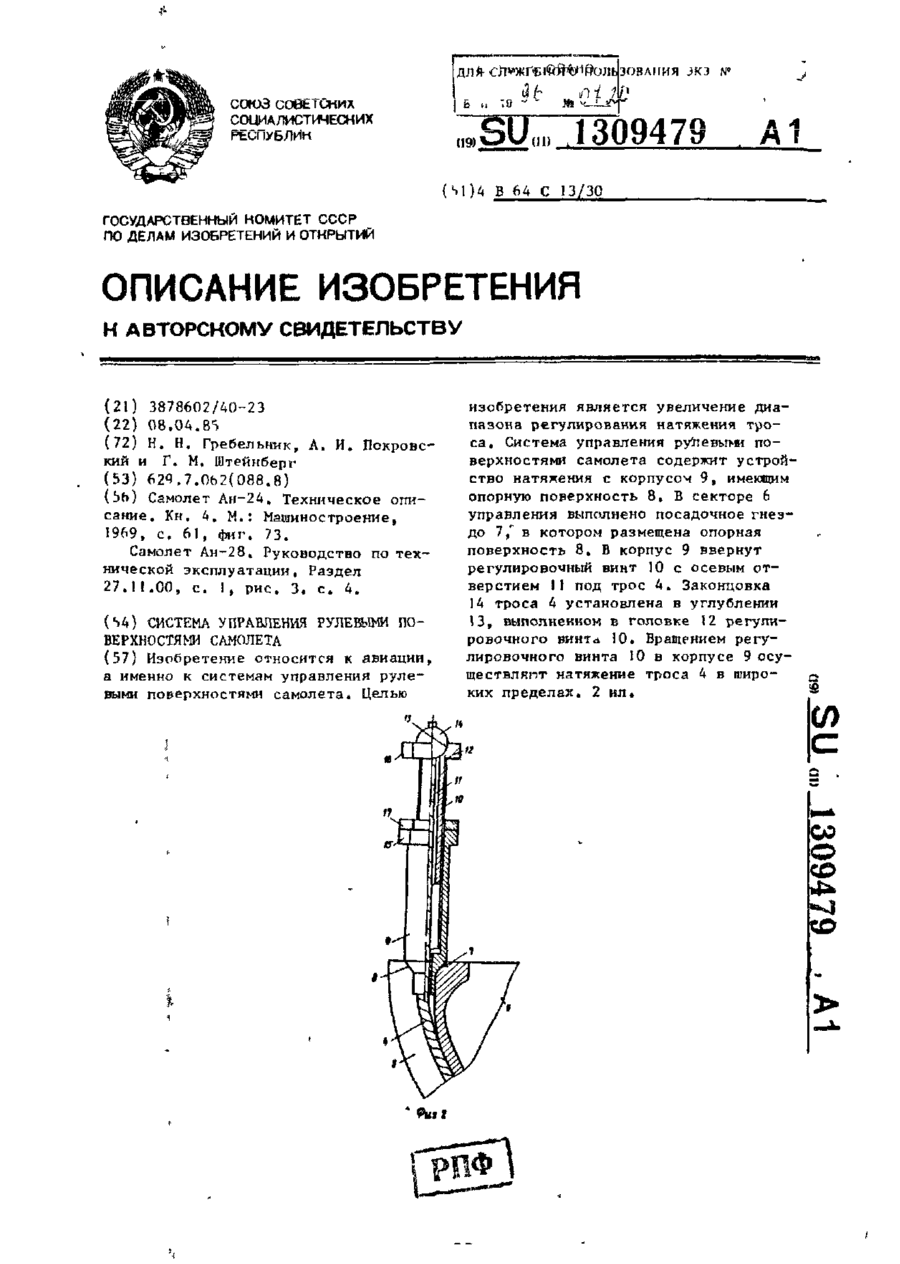
Номер патенту: 16316
Опубліковано: 29.08.1997
Автори: Гребельник Микола Никифорович, Покровський Альберт Іванович, Штейнберг Григорій Мойсейович
МПК: B64C 13/00
Мітки: літака, рульовими, система, поверхнями, управління
Формула / Реферат:
Система управлення рулевыми поверхностями самолета, содержащая сектор управления, тросс с законцовкой и устройство натяжения, включающее корпус с установленным на одном его конце регулировочным винтом, отличающаяся тем, что, с целью увеличения диапазона регулирования натяжения троса, корпус устройства натяжения выполнен с опорной поверхностью, а сектор управления-с ответным посадочным гнездом, при этом в регулировочном винте образовано осевое...
Система управління аеродинамічними поверхнями літака
Номер патенту: 15873
Опубліковано: 30.06.1997
Автори: Шмушкович Олександр Михайлович, Круглов Анатолій Анатолійович, Штейнберг Григорій Мойсейович
МПК: B64C 13/00
Мітки: літака, управління, поверхнями, аеродинамічними, система
Формула / Реферат:
(57) Система управления аэродинамическими поверхностями самолета, содержащая привод, соединенный с трансмиссией, винтовые механизмы, включающие винтовую пару и редуктор, отличающаяся тем, что винтовая пара и редуктор выполнены в виде отдельных модулей, при этом винтовая пара снабжена корпусом, закрепленным на конструкции крыла, с центрирующим буртом и шлицевой втулкой, гайка винтовой пары закреплена на аэродинамической поверхности, а...
Фюзеляж літака
Номер патенту: 12317
Опубліковано: 25.12.1996
Автори: Жан Рьодер, Леслі Джеймс Жерінг
МПК: B64C 1/00
Формула / Реферат:
(57) 1. Фюзеляж самолета, содержащий центральную часть, расположенную перед перегородкой наддува и выполненную в виде двух долей, имеющих шпангоуты и соединенных между собой с образованием верхнего и нижнего стыков, размещенных в вертикальной плоскости симметрии фюзеляжа, пол кабины, пол грузового отсека, средства крепления пола кабины, опоры, установленные на полу кабины, при этом средства крепления и опоры расположены в вертикальной...
Попередній патент: Балансний вантаж рульової поверхні літака
Наступний патент: Пристрій для навантажування літального апарату
Випадковий патент: Спосіб оцінки водневої крихкості сталей