Система керування роботою активних оптико-електронних систем з механічним модулятором
Номер патенту: 36695
Опубліковано: 10.11.2008
Автори: Альошин Олександр Михайлович, Квасніков Володимир Павлович, Ребрін Юрій Костянтинович, Сібрук Леонід Вікторович, Архипов Микола Іванович, Туренко Сергій Михайлович
Формула / Реферат
1. Система керування роботою активних оптико-електронних систем з механічним модулятором, що містить пульт керування і блок керування, при цьому пульт керування і блок керування містять комплекти задавальних і виконавчих елементів, причому пульт керування зв'язаний із блоком керування, а зазначена система керування зв'язана через блок керування з активною оптико-електронною системою з механічним модулятором, яка розміщена на літальному апараті, за допомогою кабелів бортової мережі зазначеного літального апарата, яка відрізняється тим, що до складу пульта керування додатково введені плата режимів, випрямляч для живлення ротора електродвигуна, який входить до складу активної оптико-електронної системи з механічним модулятором, задатчики/перемикачі частот і комутаційні елементи типу рознімань і розеток, а до складу блока керування додатково введені схема електроживлення з контактором, схема включення інфрачервоного випромінювача, схема керування електродвигуном, схема контролю і стабілізації частоти, схема керування вентиляторами охолодження та схема вбудованого контролю, при цьому до складу плати режимів входять плата стабілізації і плата керування, причому плата стабілізації містить формувач еталонного інтервалу зі схемами керування, формувач сигналу зворотного зв'язку, схему порівняння і керування частотою обертання електродвигуна, допоміжну схему керування контактором, допоміжну схему формування сигналів "відмова" і "робота", і схему "відмови" по випромінюванню, плата керування містить схему пам'яті режимів, що виконана на мікропроцесорних елементах, схему вибору режимів, перетворювач живлення "27В-5В" і комутаційні елементи типу перемикачів/кнопок.
2. Система за п. 1, яка відрізняється тим, що на блоці керування також розміщують комутаційні елементи типу рознімань і розеток.
3. Система за п. 1, яка відрізняється тим, що активна оптико-електронна система з механічним модулятором, яка з'єднана з блоком керування системи керування, містить блок випромінювача, до складу якого входять обертовий модулятор, електродвигун, вентилятори для охолодження обертового модулятора, фотодіод і джерело інфрачервоного випромінювання.
Текст
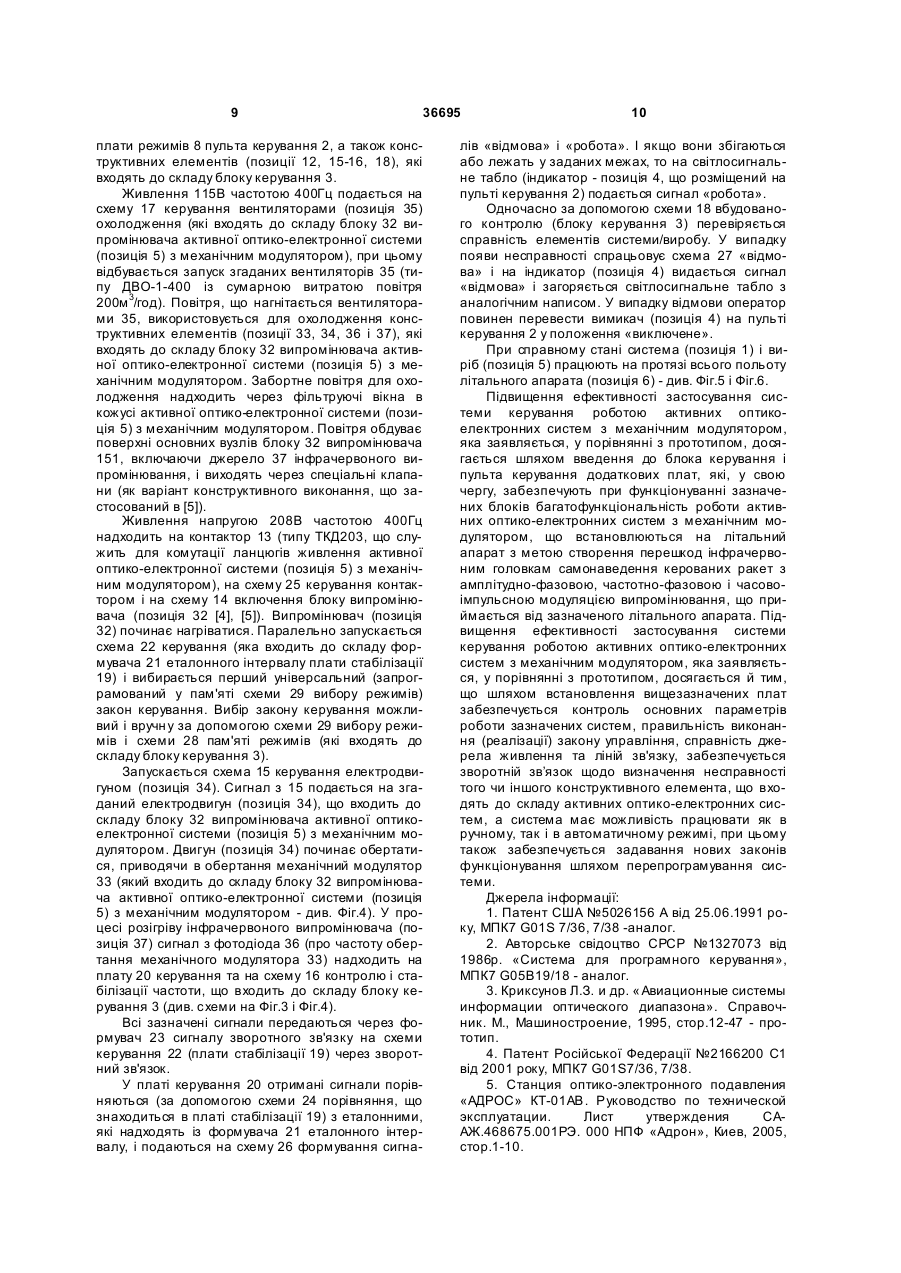
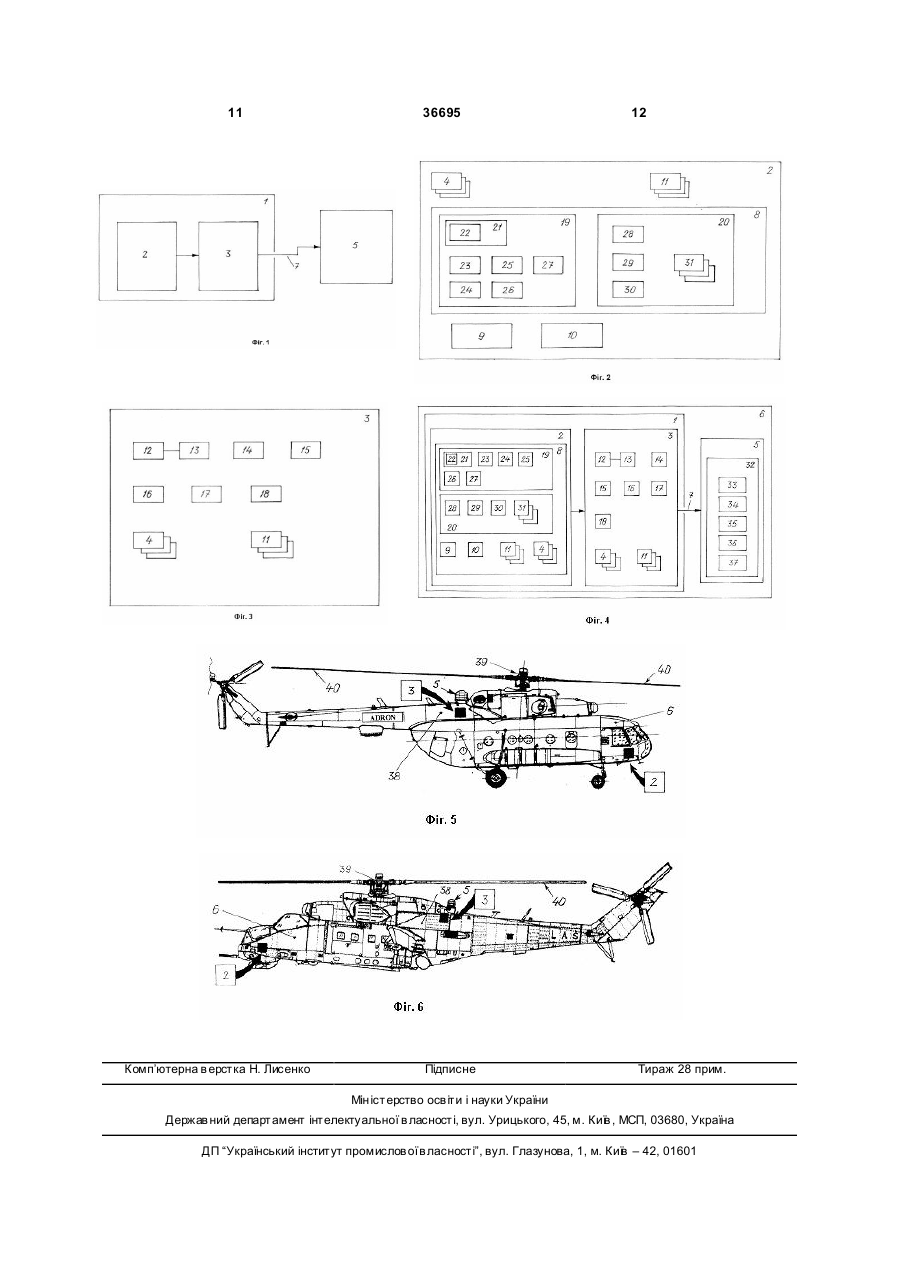
1. Система керування роботою активних оптико-електронних систем з механічним модулятором, що містить пульт керування і блок керування, при цьому пульт керування і блок керування містять комплекти задавальних і виконавчих елементів, причому пульт керування зв'язаний із блоком керування, а зазначена система керування зв'язана через блок керування з активною оптикоелектронною системою з механічним модулятором, яка розміщена на літальному апараті, за допомогою кабелів бортової мережі зазначеного літального апарата, яка відрізняється тим, що до складу пульта керування додатково введені плата режимів, випрямляч для живлення ротора електродвигуна, який входить до складу активної оптико-електронної системи з механічним модулятором, задатчики/перемикачі частот і комутаційні елементи типу рознімань і розеток, а до складу U 2 (19) 1 3 36695 систем, не контролюється правильність виконання (реалізації) закону управління, справність джерела живлення та ліній зв'язку. Відома система керування роботою активних оптико-електронних систем, що містить пульт керування і блок керування, при цьому пульт керування і блок керування містять, кожний, комплекти задаючих і виконавчих елементів, причому пульт керування зв'язаний із блоком керування, а зазначена система керування зв'язана через блок керування з оптико-електронною системою [2]. До недоліків відомої системи керування роботою активних оптико-електронних систем відноситься те, що при відомому конструктивному виконанні не забезпечується багатофункціональність роботи активних оптико-електронних систем, не контролюються основні параметри роботи зазначених систем, не контролюється правильність виконання (реалізації) закону управління, справність джерела живлення та ліній зв'язку, немає зворотного зв’язку щодо несправності того чи іншого конструктивного елемента, що входять до складу активних оптико-електронних систем. До недоліків відноситься й те, що система працює лише на заданій частоті, закон управління вибирається тільки вручн у. Найбільш близьким технічним рішенням, як по суті, так і по задачах, які вирішуються, що обрано за найближчий аналог (прототип), є система керування роботою активних оптико-електронних систем з механічним модулятором, яка містить пульт керування і блок керування, при цьому пульт керування і блок керування містять комплекти задаючих і виконавчих елементів, причому пульт керування зв'язаний із блоком керування, а зазначена система керування зв'язана через блок керування з активною оптико-електронною системою з механічним модулятором, яка розміщена на літальному апараті, за допомогою кабелів бортової мережі зазначеного літального апарата [3]. До недоліків відомої системи керування роботою активних оптико-електронних систем з механічним модулятором, що обрана за найближчий аналог (прототип), відноситься те, що вона працює на заданій частоті, працює від джерел живлення з напругою 27В постійного струму, має невелику кількість законів модуляції, які вибираються вручну, керування електродвигуном ІЧ-випрмінювача, що входить до складу активних оптикоелектронних систем з механічним модулятором, здійснюєть лише по одній програмі модуляції, що введена у пам'ять пристрою/виробу, охолодження модулятора, що обертається, здійснюється постійним потоком повітря. До недоліків відноситься й те, що відсутній вбудований контроль всієї системи/виробу - контролюється тільки частота обертання механічного модулятора. В основу корисної моделі покладена задача шляхом усунення недоліків прототипу забезпечити багатофункціональність роботи активних оптикоелектронних систем з механічним модулятором, що встановлюються на літальний апарат з метою створення перешкод інфрачервоним головкам самонаведення керованих ракет з амплітуднофазовою, частотно-фазовою і часово-імпульсною 4 модуляцією випромінювання, що приймається від зазначеного літального апарата. Суть корисної моделі у системі керування роботою активних оптико-електронних систем з механічним модулятором, яка містить пульт керування і блок керування, при цьому пульт керування і блок керування містять комплекти задаючих і виконавчих елементів, причому пульт керування зв'язаний із блоком керування, а зазначена система керування зв'язана через блок керування з активною оптико-електронною системою з механічним модулятором, яка розміщена на літальному апараті, за допомогою кабелів бортової мережі зазначеного літального апарата, полягає в тому, що до складу пульта керування додатково введені плата режимів, випрямляч для живлення ротора електродвигуна, який входить до складу активної оптико-електронної системи з механічним модулятором, задатчики/перемикачі частот і комутаційні елементи типу рознімань і розеток, а до складу блоку керування додатково введені схема електроживлення з контактором, схема включення інфрачервоного випромінювача, схема керування електродвигуном, схема контролю і стабілізації частоти, схема керування вентиляторами охолодження та схема вбудованого контролю. Суть корисної моделі полягає і в тому, що до складу плати режимів входять плата стабілізації і плата керування. Суть корисної моделі полягає також і в тому, що плата стабілізації містить формувач еталонного інтервалу зі схемами керування, формувач сигналу зворотного зв'язку, схему порівняння і керування частотою обертання електродвигуна, допоміжну схему керування контактором, допоміжну схему формування сигналів «відмова» і «робота», і схему «відмови» по випромінюванню, плата керування містить схему пам'яті режимів, що виконана на мікропроцесорних елементах, схему вибору режимів, перетворювач живлення «27В5В» і комутаційні елементи типу перемикачів/кнопок, на блоці керування також розміщують комутаційні елементи типу рознімань і розеток, а активна оптико-електронна система з механічним модулятором, яка з'єднана з блоком керування системи керування, містить блок випромінювача, до складу якого входять обертовий модулятор, електродвигун, вентилятори для охолодження обертового модулятора, фотодіод і джерело інфрачервоного випромінювання. Порівняльний аналіз технічного рішення з прототипом показує, що система керування роботою активних оптико-електронних систем з механічним модулятором, яка заявляється, відрізняється тім, що до складу пульта керування додатково введені плата режимів, випрямляч для живлення ротора електродвигуна, який входить до складу активної оптико-електронної системи з механічним модулятором, задатчики/перемикачі частот і комутаційні елементи типу рознімань і розеток, а до складу блоку керування додатково введені схема електроживлення з контактором, схема включення інфрачервоного випромінювача, схема керування електродвигуном, схема контролю і стабілізації частоти, схема керування вентиляторами охоло 5 36695 дження та схема вбудованого контролю, при цьому до складу плати режимів входять плата стабілізації і плата керування, причому плата стабілізації містить формувач еталонного інтервалу зі схемами керування, формувач сигналу зворотного зв'язку, схему порівняння і керування частотою обертання електродвигуна, допоміжну схему керування контактором, допоміжну схему формування сигналів «відмова» і «робота», і схему «відмови» по випромінюванню, плата керування містить схему пам'яті режимів, що виконана на мікропроцесорних елементах, схему вибору режимів, перетворювач живлення «27В-5В» і комутаційні елементи типу перемикачів/кнопок, на блоці керування також розміщують комутаційні елементи типу рознімань і розеток, а активна оптико-електронна система з механічним модулятором, яка з'єднана з блоком керування системи керування, містить блок випромінювача, до складу якого входять обертовий модулятор, електродвигун, вентилятори для охолодження обертового модулятора, фотодіод і джерело інфрачервоного випромінювання. Таким чином, система керування роботою активних оптико-електронних систем з механічним модулятором, яка заявляється, відповідає критерію корисної моделі «новизна». Суть корисної моделі пояснюється за допомогою ілюстрацій, де на Фіг.1 показана блок-схема системи керування роботою активних оптико-електронних систем з механічним модулятором, яка заявляється, на Фіг.2 показана блок-схема пульта керування, який входить складовою частиною до системи керування роботою активних оптико-електронних систем з механічним модулятором, яка заявляється, на Фіг.3 показана блок-схема блока керування, який входить складовою частиною до системи керування роботою активних оптико-електронних систем з механічним модулятором, яка заявляється, на Фіг.4 показана блок-схема системи керування роботою активних оптико-електронних систем з механічним модулятором, яка заявляється, з розкриттям конструкції кожного з конструктивних елементів, на Фіг.5 показана схема розміщення конструктивних елементів системи керування роботою активних оптико-електронних систем з механічним модулятором і зазначеної оптико-електронної системи з механічним модулятором на вертольоті типу Мі-8 (як варіант конструктивного виконання), на Фіг.6 показана схема розміщення конструктивних елементів системи керування роботою активних оптико-електронних систем з механічним модулятором і зазначеної оптико-електронної системи з механічним модулятором на вертольоті типу Мі-24 (як варіант конструктивного виконання). Система (позиція 1) керування роботою активних оптико-електронних систем з механічним модулятором (як варіант конструктивного виконання див. Фіг.1 і Фіг.4) містить пульт керування 2 (див. Фіг.2 і Фіг.4) і блок керування 3 (див. Фіг.3-4). Конструктивно пульт керування 2 і блок керування 3 містить (кожний) комплекти задаючих і виконавчих 6 елементів 4 (див. Фіг.2-4). Конструктивно і те хнологічно пульт керування 2 зв'язаний із блоком керування 3, а зазначена система 1 керування зв'язана через блок керування 3 з активною оптикоелектронною системою (позиція 5) з механічним модулятором, яка розміщена на літальному апараті (позиція 6 -див. Фіг.5), за допомогою кабелів 7 бортової мережі зазначеного літального апарата 6. Конструктивно до складу пульта керування 2 додатково введені плата 8 режимів, випрямляч 9 для живлення ротора електродвигуна, який входить до складу активної оптико-електронної системи (позиція 5) з механічним модулятором, задатчики/перемикачі 10 частот і комутаційні елементи 11 типу рознімань і розеток (див. Фіг.2). Конструктивно до складу блоку керування 3 додатково введені схема електроживлення 12 з контактором 13, схема 14 включення інфрачервоного випромінювача, схема 15 керування електродвигуном, схема 16 контролю і стабілізації частоти, схема 17 керування вентиляторами охолодження та схема 18 вбудованого контролю (див. Фіг.3). Конструктивно до складу плати 8 режимів входять плата 19 стабілізації і плата 20 керування (див. Фіг.2 та Фіг.4). Конструктивно плата 19 стабілізації містить формувач 21 еталонного інтервалу зі схемами 22 керування, формувач 23 сигналу зворотного зв'язку, схему 24 порівняння і керування частотою обертання електродвигуна, допоміжну схему 25 керування контактором, допоміжну схему 26 формування сигналів «відмова» і «робота», і схему 27 «відмови» по випромінюванню (див. Фіг.2). Конструктивно плата 20 керування містить схему 28 пам'яті режимів, що виконана на мікропроцесорних елементах, схему 29 вибору режимів, перетворювач живлення «27В-5В» (позиція 30) і комутаційні елементи 31 типу перемикачів/кнопок. На блоці керування З також розміщують комутаційні елементи 11 типу рознімань і розеток (див. Фіг.3 та Фіг.4). Активна оптико-електронна система (позиція 5) з механічним модулятором (що розміщена на літальному апараті 6), яка з'єднана з блоком керування 3 системи керування 1, містить (як варіант конструктивного виконання [4]) блок випромінювача 32, до складу якого входять обертовий модулятор 33 (обтюратор [4]), електродвигун 34, вентилятори 35 для охолодження обертового модулятора 33, фото діод 36 і джерело 37 інфрачервоного випромінювання. Система керування роботою активних оптикоелектронних систем з механічним модулятором, яка заявляється, працює/експлуатується (використовується у встановленому виді на літальному апараті, наприклад, на вертольоті типу Мі-8 або Мі-24 всіх модифікацій - див., відповідно, Фіг.5 та Фіг.6) наступним чином. Попередньо виготовляють: - для пульта керування (позиція 2) - виконавчі елементи 4, випрямляч 9 для живлення ротора електродвигуна, який входить до складу активної оптико-електронної системи (позиція 5) з механічним модулятором, задатчики/перемикачі 10 частот і комутаційні елементи 11 типу рознімань і розеток. Також для зазначеного пульта керування (позиція 7 36695 2) виготовляють плату 19 стабілізації (яка конструктивно містить формувач 21 еталонного інтервалу зі схемами 22 керування, формувач 23 сигналу зворотного зв'язку, схему 24 порівняння і керування частотою обертання електродвигуна, допоміжну схему 25 керування контактором, допоміжну схему 26 формування сигналів «відмова» і «робота», і схему 27 «відмови» по випромінюванню), і плату 20 керування (яка конструктивно містить схему 28 пам'яті режимів, що виконана на мікропроцесорних елементах, схему 29 вибору режимів, перетворювач живлення «27В-5В» (позиція 30) і комутаційні елементи 31 типу перемикачів/кнопок). Плата 19 стабілізації призначена для стабілізації частоти обертання модулятора 33 виробу (позиція 5). Схема 24 порівняння і керування частотою обертання електродвигуна (позиція 34) призначена для узгодження за рівнем напруги і стр уму сигналів керування ключовим транзистором із ТТЛ рівнями. Схема 26 формування сигналів «відмова» і «робота» призначена для вироблення сигналу « відмова», який запалює світлове табло з написом «відмова» на пульті керування 2, і для керування контактором 13, а також для запалювання світлового табло з написом «робота» на зазначеному пульті керування 2; - для блока керування (позиція 3) - виконавчі елементи 4, схему електроживлення 12 з контактором 13, схему 14 включення інфрачервоного випромінювача, схему 15 керування електродвигуном, схему 16 контролю і стабілізації частоти, схему 17 керування вентиляторами охолодження та схему 18 вбудованого контролю. Після цього із відповідних зазначених деталей і вузлів збирають пульт керування (позиція 2) і блок керування (позиція 3). Конструктивно і технологічно на корпусі пульта керування (позиція 2) закріплюють комутаційні елементи 31 типу перемикачів/кнопок, виконавчі елементи 4 (світлосигнальні табло, перемикачі, вимикачі тощо), комутаційні елементи 11 типу рознімань і розеток. На корпусі блока керування (позиція 3) закріплюють виконавчі елементи 4 (типу світлосигнальних табло, перемикачів, вимикачів тощо), комутаційні елементи 11 типу рознімань і розеток. Блок керування (позиція 3) встановлюють на літальному апараті 6, наприклад, на вертольоті типу Мі-8 чи Мі-24 усі х модифікацій в салоні вертольота (як варіант конструктивного виконання), а пульт керування (позиція 2) встановлюють на зазначеному літальному апараті 6 в кабіні екіпажу (як варіант конструктивного виконання) (див., відповідно, Фіг.5 і Фіг.6). Активну оптико-електронну систему (позиція 5) з механічним модулятором встановлюють зверху фюзеляжу 38 вертольоту (позиція 6) за втулкою 39 несучого гвинта (позиція 40) (як варіант конструктивного виконання) (див., відповідно, Фіг.5 і Фіг.6). Принцип роботи активної оптико-електронної системи (позиція 5) з механічним модулятором полягає в тому, що інфрачервоне випромінювання, що створюється нагрівачем зазначеного пристрою, за допомогою електромеханічного модулятора (позиція 33) перетвориться в імпульси інфрачервоного випромінювання, які випливають із частотою, що підпорядковується 8 складному багатомірному закону. Така послідовність несе в собі перекручену інформацію про місце розташування об'єкта авіаційної техніки, який захищається, щодо оптичної осі інфрачервоної головки самонаведення, що розміщена на ракеті, яка атакує зазначений об'єкт авіаційної техніки. У результаті впливу завадового випромінювання в каналі керування ракети (і в інфрачервоній головці самонаведення) відбувається руйнування сигналу від цілі. Це приводить до руху координатора згаданої інфрачервоної головки самонаведення по спіралі з наступною втратою повітряної цілі - літального апарата, який атакувався ракетою [5]. Після встановлення зазначених конструктивних елементів на літальному апараті 6, блок керування (позиція 3) з'єднують з пультом керування (позиція 2) і з активною оптико-електронною системою (позиція 5) з механічним модулятором (див. Фіг.1, Фіг.4-5), при цьому зазначена система 1 керування є зв'язаною через блок керування 3 з активною оптико-електронною системою (позиція 5) з механічним модулятором, яка розміщена на літальному апараті (позиція 6 - див. Фіг.5), за допомогою кабелів 7 бортової мережі зазначеного літального апарата 6 (наприклад, за допомогою рознімань (позиція 11) типу СНЦ-23, ШР48 або 2РМ18). Пульт керування 2 з'єднується з блоком випромінювача (позиція 32) активної оптикоелектронної системи (позиція 5) з механічним модулятором за допомогою рознімання (позиція 11) типу 2РМ24. Система керування роботою активних оптикоелектронних систем з механічним модулятором, яка заявляється, працює наступним чином. За допомогою задатчиків/перемикачів частот 10 (які розміщені на лицьовій панелі пульта керування 2) вибираються різні частоти (які йдуть на перемикач блоку керування 3 для оперативного перемикання частот у польоті). З пульта керування 2 можливо переключення різних раніше запрограмованих на блоці керування 3 частот. Значення частот визначається положенням виконавчих елементів (позиція 4) - перемикачів, що розміщені на ліцевій панелі блока керування 3. Після включення вимикача (позиція 31) «ЖИВЛЕННЯ» на пульті керування 2, бортове електроживлення напругою +27В, однофазною напругою 115В частотою 400Гц і напругою 208В частотою 400Гц надходить у блок керування 3, а живлення +27В - у пульт керування 2. Живлення +27В в пульті керування 2 і в блоці керування 3 перетвориться за допомогою схеми електроживлення 12 (яка розміщена в блоці керування 3 і з'єднана з контактором 13) і стабілізується за допомогою плати 19 стабілізації (яка входить до складу плати 8 режимів пульта керування 2) (див. Фіг.2 і Фіг.4). При цьому також використовується випрямляч 9 (який входить до складу пульта керування 2) і перетворювач 30 живлення (який входить до складу плати стабілізації 19 зазначеного пульта керування 2) (див. Фіг.2 та Фіг.4). Живлення +5В використовується для електроживлення електричних систем всіх конструктивних елементів (позиції 21-27, 28-31), які входять до складу, відповідно, плати 19 стабілізації та плати 20 керування 9 36695 плати режимів 8 пульта керування 2, а також конструктивних елементів (позиції 12, 15-16, 18), які входять до складу блоку керування 3. Живлення 115В частотою 400Гц подається на схему 17 керування вентиляторами (позиція 35) охолодження (які входять до складу блоку 32 випромінювача активної оптико-електронної системи (позиція 5) з механічним модулятором), при цьому відбувається запуск згаданих вентиляторів 35 (типу ДВО-1-400 із сумарною витратою повітря 200м 3/гoд). Повітря, що нагнітається вентиляторами 35, використовується для охолодження конструктивних елементів (позиції 33, 34, 36 і 37), які входять до складу блоку 32 випромінювача активної оптико-електронної системи (позиція 5) з механічним модулятором. Забортне повітря для охолодження надходить через фільтруючі вікна в кожусі активної оптико-електронної системи (позиція 5) з механічним модулятором. Повітря обдуває поверхні основних вузлів блоку 32 випромінювача 151, включаючи джерело 37 інфрачервоного випромінювання, і виходять через спеціальні клапани (як варіант конструктивного виконання, що застосований в [5]). Живлення напругою 208В частотою 400Гц надходить на контактор 13 (типу ТКД203, що служить для комутації ланцюгів живлення активної оптико-електронної системи (позиція 5) з механічним модулятором), на схему 25 керування контактором і на схему 14 включення блоку випромінювача (позиція 32 [4], [5]). Випромінювач (позиція 32) починає нагріватися. Паралельно запускається схема 22 керування (яка входить до складу формувача 21 еталонного інтервалу плати стабілізації 19) і вибирається перший універсальний (запрограмований у пам'яті схеми 29 вибору режимів) закон керування. Вибір закону керування можливий і вручн у за допомогою схеми 29 вибору режимів і схеми 28 пам'яті режимів (які входять до складу блоку керування 3). Запускається схема 15 керування електродвигуном (позиція 34). Сигнал з 15 подається на згаданий електродвигун (позиція 34), що входить до складу блоку 32 випромінювача активної оптикоелектронної системи (позиція 5) з механічним модулятором. Двигун (позиція 34) починає обертатися, приводячи в обертання механічний модулятор 33 (який входить до складу блоку 32 випромінювача активної оптико-електронної системи (позиція 5) з механічним модулятором - див. Фіг.4). У процесі розігріву інфрачервоного випромінювача (позиція 37) сигнал з фотодіода 36 (про частоту обертання механічного модулятора 33) надходить на плату 20 керування та на схему 16 контролю і стабілізації частоти, що входить до складу блоку керування 3 (див. схеми на Фіг.3 і Фіг.4). Всі зазначені сигнали передаються через формувач 23 сигналу зворотного зв'язку на схеми керування 22 (плати стабілізації 19) через зворотний зв'язок. У платі керування 20 отримані сигнали порівняються (за допомогою схеми 24 порівняння, що знаходиться в платі стабілізації 19) з еталонними, які надходять із формувача 21 еталонного інтервалу, і подаються на схему 26 формування сигна 10 лів «відмова» і «робота». І якщо вони збігаються або лежать у заданих межах, то на світлосигнальне табло (індикатор - позиція 4, що розміщений на пульті керування 2) подається сигнал «робота». Одночасно за допомогою схеми 18 вбудованого контролю (блоку керування 3) перевіряється справність елементів системи/виробу. У випадку появи несправності спрацьовує схема 27 «відмова» і на індикатор (позиція 4) видається сигнал «відмова» і загоряється світлосигнальне табло з аналогічним написом. У випадку відмови оператор повинен перевести вимикач (позиція 4) на пульті керування 2 у положення «виключене». При справному стані система (позиція 1) і виріб (позиція 5) працюють на протязі всього польоту літального апарата (позиція 6) - див. Фіг.5 і Фіг.6. Підвищення ефективності застосування системи керування роботою активних оптикоелектронних систем з механічним модулятором, яка заявляється, у порівнянні з прототипом, досягається шляхом введення до блока керування і пульта керування додаткових плат, які, у свою чергу, забезпечують при функціонуванні зазначених блоків багатофункціональність роботи активних оптико-електронних систем з механічним модулятором, що встановлюються на літальний апарат з метою створення перешкод інфрачервоним головкам самонаведення керованих ракет з амплітудно-фазовою, частотно-фазовою і часовоімпульсною модуляцією випромінювання, що приймається від зазначеного літального апарата. Підвищення ефективності застосування системи керування роботою активних оптико-електронних систем з механічним модулятором, яка заявляється, у порівнянні з прототипом, досягається й тим, що шляхом встановлення вищезазначених плат забезпечується контроль основних параметрів роботи зазначених систем, правильність виконання (реалізації) закону управління, справність джерела живлення та ліній зв'язку, забезпечується зворотній зв’язок щодо визначення несправності того чи іншого конструктивного елемента, що входять до складу активних оптико-електронних систем, а система має можливість працювати як в ручному, так і в автоматичному режимі, при цьому також забезпечується задавання нових законів функціонування шляхом перепрограмування системи. Джерела інформації: 1. Патент США №5026156 А від 25.06.1991 року, МПК7 G01S 7/36, 7/38 -аналог. 2. Авторське свідоцтво СРСР №1327073 від 1986р. «Система для програмного керування», МПК7 G05В19/18 - аналог. 3. Криксунов Л.З. и др. « Авиационные системы информации оптического диапазона». Справочник. М., Машиностроение, 1995, стор.12-47 - прототип. 4. Патент Російської Федерації №2166200 С1 від 2001 року, МПК7 G01S7/36, 7/38. 5. Станция оптико-электронного подавления «АДРОС» КТ-01АВ. Руководство по технической эксплуатации. Лист утверждения СААЖ.468675.001РЭ. 000 НПФ «Адрон», Киев, 2005, стор.1-10. 11 Комп’ютерна в ерстка Н. Лисенко 36695 Підписне 12 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for control of operation of active optical-electronic systems with mechanical modulator
Автори англійськоюArkhypov Mykola Ivanovych, Alioshyn Oleksandr Mykhailovych, Kvasnikov Volodymyr Pavlovych, Rebrin Yurii Kostiantynovych, Sibruk Leonid Viktorovych, Turenko Serhii Mykhailovych
Назва патенту російськоюСистема управления работой активных оптико-электронных систем с механическим модулятором
Автори російськоюАрхипов Николай Иванович, Алешин Александр Михайлович, Квасников Владимир Павлович, Ребрин Юрий Константинович, Сибрук Леонид Викторович, Туренко Сергей Михайлович
МПК / Мітки
МПК: G05G 11/00, G05B 19/00, G05B 13/00, G05B 21/00, G05B 24/00
Мітки: оптико-електронних, роботою, модулятором, механічним, систем, система, керування, активних
Код посилання
<a href="https://ua.patents.su/6-36695-sistema-keruvannya-robotoyu-aktivnikh-optiko-elektronnikh-sistem-z-mekhanichnim-modulyatorom.html" target="_blank" rel="follow" title="База патентів України">Система керування роботою активних оптико-електронних систем з механічним модулятором</a>
Спосіб контролю та регулювання параметрів оптико-телевізійних систем керування вогнем та пристрій для його здійснення
Номер патенту: 80242
Опубліковано: 27.08.2007
Автори: Свириденко Анатолій Олексійович, Піронер Ян Михайлович, Ковальчук Лідія Ігорівна, Колесник Костянтин Іванович, Немчин Олександр Федорович, Медвідь Володимир Станіславович, Яковлев Віталій Васильович, Протасов Володимир Георгійович, Яновський Юрій Васильович, Гузь Володимир Іванович
Мітки: контролю, здійснення, параметрів, регулювання, керування, оптико-телевізійних, вогнем, систем, пристрій, спосіб
Формула / Реферат:
1. Спосіб контролю та регулювання параметрів оптико-телевізійних систем керування вогнем, при якому на об'єкт контролю від джерела тестових сигналів послідовно подають рівні керованих вхідних амплітуд тестових сигналів, вимірюють за допомогою вимірювального пристрою сукупність значень вихідних інформаційних параметрів об'єкта контролю - еквівалентні значення амплітуд, обробляють значення вхідних амплітуд тестових сигналів та вихідних...
Пристрій для управління і контролю за роботою двох електронних керуємих систем
Номер патенту: 2103
Опубліковано: 26.12.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G05B 19/18
Мітки: двох, роботою, електронних, пристрій, систем, управління, керуємих, контролю
Формула / Реферат:
Устройство для управления и контроля за работой двух электронных управляемых систем, содержащее генератор импульсов, выход которого соединен с информационными входом первого счетчика импульсов, подключенного выходами к входам дешифратора, а также блок триггеров, первый и второй блоки элементов И-НЕ, отличающееся тем, что, с целью расширения области применения за счет обеспечения асинхронного управления работой дублированных электронных...
Система керування роботою модуля нагріву
Номер патенту: 35458
Опубліковано: 25.09.2008
Автори: Семенюк Андрій Олександрович, Шевчук Микола Федорович
МПК: F24H 1/00
Мітки: керування, модуля, роботою, нагріву, система
Формула / Реферат:
1. Система керування роботою модуля нагріву, яка відрізняється тим, що містить електронний блок, який задає послідовність включення окремих нагрівальних елементів модуля та інтервал між їх включеннями у залежності від різниці заданої температури та поточної температури теплоносія та від швидкості підвищення температури теплоносія з можливістю переходу на форсований режим роботи модуля нагріву.2. Система за п. 1, яка відрізняється тим,...
Оптико-телевізійна система керування вогнем
Номер патенту: 36182
Опубліковано: 10.10.2008
Автори: Гузь Володимир Іванович, Піронер Ян Михайлович, Медвідь Володимир Станіславович, Немчин Олександр Федорович, Яновський Юрій Васильович, Колесник Костянтин Іванович, Протасов Володимир Георгійович, Свириденко Анатолій Олексійович, Ковальчук Лідія Ігорівна, Яковлев Віталій Васильович
Мітки: вогнем, система, оптико-телевізійна, керування
Формула / Реферат:
1. Оптико-телевізійна система керування вогнем, що містить оптико-електронний модуль, блок керування механізмами системи керування вогнем, блок озброєння, привід вертикального наведення, привід горизонтального наведення, пульт командира системи керування вогнем, відеомонітор командира, електродвигун приводу вертикального наведення та електродвигун приводу горизонтального наведення, при цьому до складу оптико-електронного модуля входять...
Спосіб керування потужністю в замкненій системі керування потужністю системи зв’язку з режимом паралельного доступу з кодовим розподілом каналів (пдкр) (варіанти) та замкнена система керування потужністю систем
Номер патенту: 57747
Опубліковано: 15.07.2003
Автор: Сеінтс Кіт В.
МПК: H04B 7/00
Мітки: потужністю, системі, замкнений, варіанти, режимом, доступу, зв'язку, каналів, кодовим, спосіб, керування, замкнена, розподілом, паралельного, пдкр, система, систем
Формула / Реферат:
1. Спосіб керування потужністю в замкненій системі керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в:вимірюванні значення енергії у смузі частот,вимірюванні енергії пілот-каналу,перерахунку зазначеної енергії пілот-каналу відповідно до значення пілотної складової для одержання значення неперешкоджаючої енергії.відніманні зазначеного значення...
Попередній патент: Система для гасіння полум`я
Наступний патент: Швидкодіючий диференціальний вимикач комбінований