Пристрій для переміщення по ферромагнітній поверхні
Номер патенту: 4029
Опубліковано: 27.12.1994
Автори: Полуянов Михайло Олександрович, Гільман Кім Муневич, Забіяка Леонід Феодосеєвич, Кучернюк Валентин Антонович, Яновський Василь Юрійович, Балакіров Юрій Айрапетович, Кірпа Володимир Володимирович
Формула / Реферат
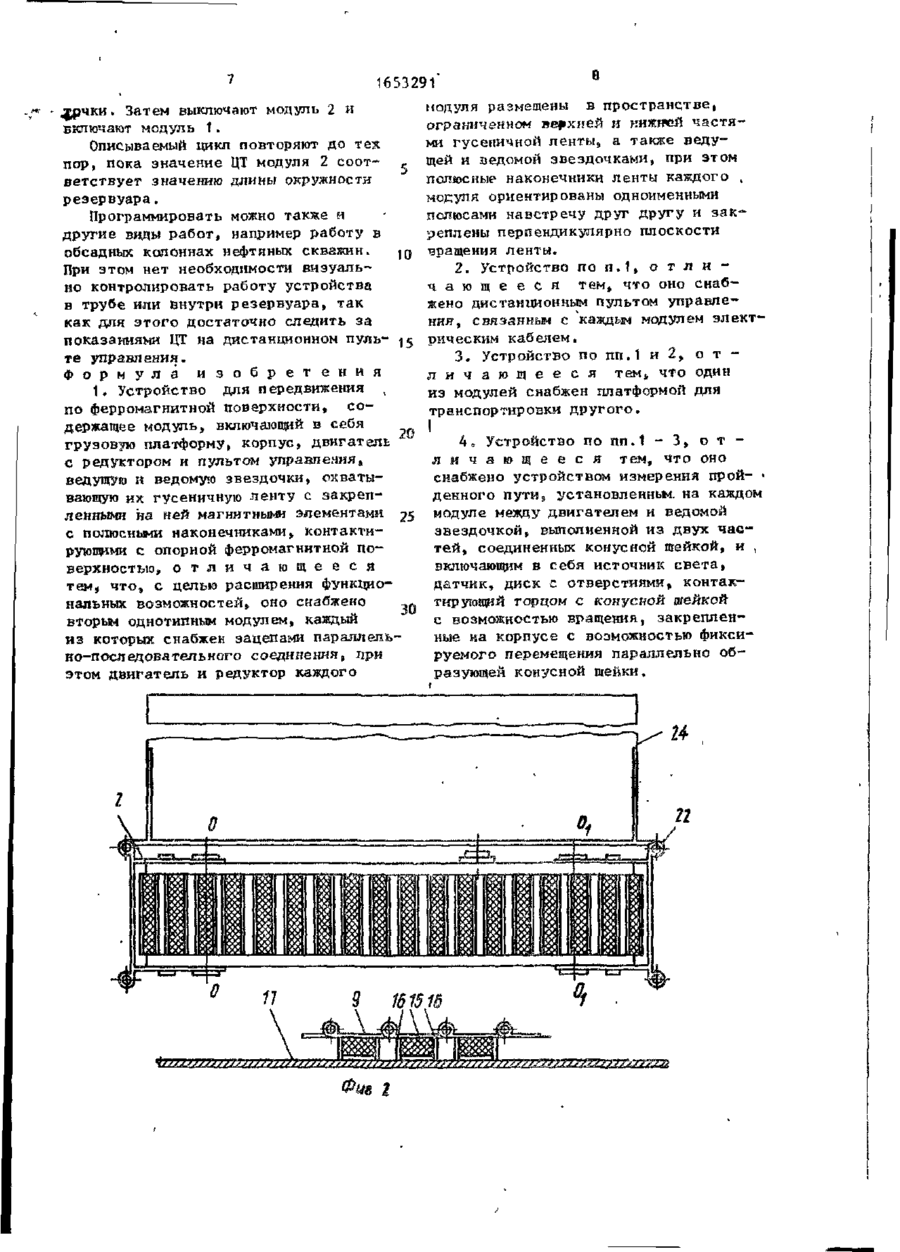
1. Устройство для передвижения по ферромагнитной поверхности, содержащее модуль, включающий в себя грузовую платформу, корпус, двигатель с редуктором и пультом управления, ведущую и ведомую звездочки, охватывающую их гусеничную ленту с закрепленными на ней магнитными элементами с полюсными наконечниками, контактирующими с опорной ферромагнитной поверхностью, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено однотипным модулем, каждый из которых снабжен зацепами параллельно-последовательного соединения, при этом двигатель и редуктор каждого модуля размещены в пространстве, ограниченном верхней и нижней частями гусеничной ленты, а также ведущей и ведомой звездочками, при этом полюсные наконечники ленты каждого модуля ориентированы одноименными полюсами навстречу друг другу и закреплены перпендикулярно плоскости вращения ленты.
2. Устройство по п. 1, отличающееся тем, что оно снабжено дистанционным пультом управления, связанным с каждым модулем электрическим кабелем.
3. Устройство по пп. 1 и 2, отличающееся тем, что один из модулей снабжен платформой для транспортировки другого.
4. Устройство по пп. 1-3, отличающееся тем, что оно снабжено устройством для измерения пройденного пути, установленным на каждом модуле между двигателем и ведомой звездочкой, выполненной из двух частей, соединенных конусной шейкой, и включающим в себя источник света, датчик, диск с отверстиями, контактирующий торцом с конусной шейкой с возможностью вращения, закрепленные на корпусе с возможностью фиксируемого перемещения параллельно образующей конусной шейки.
Текст
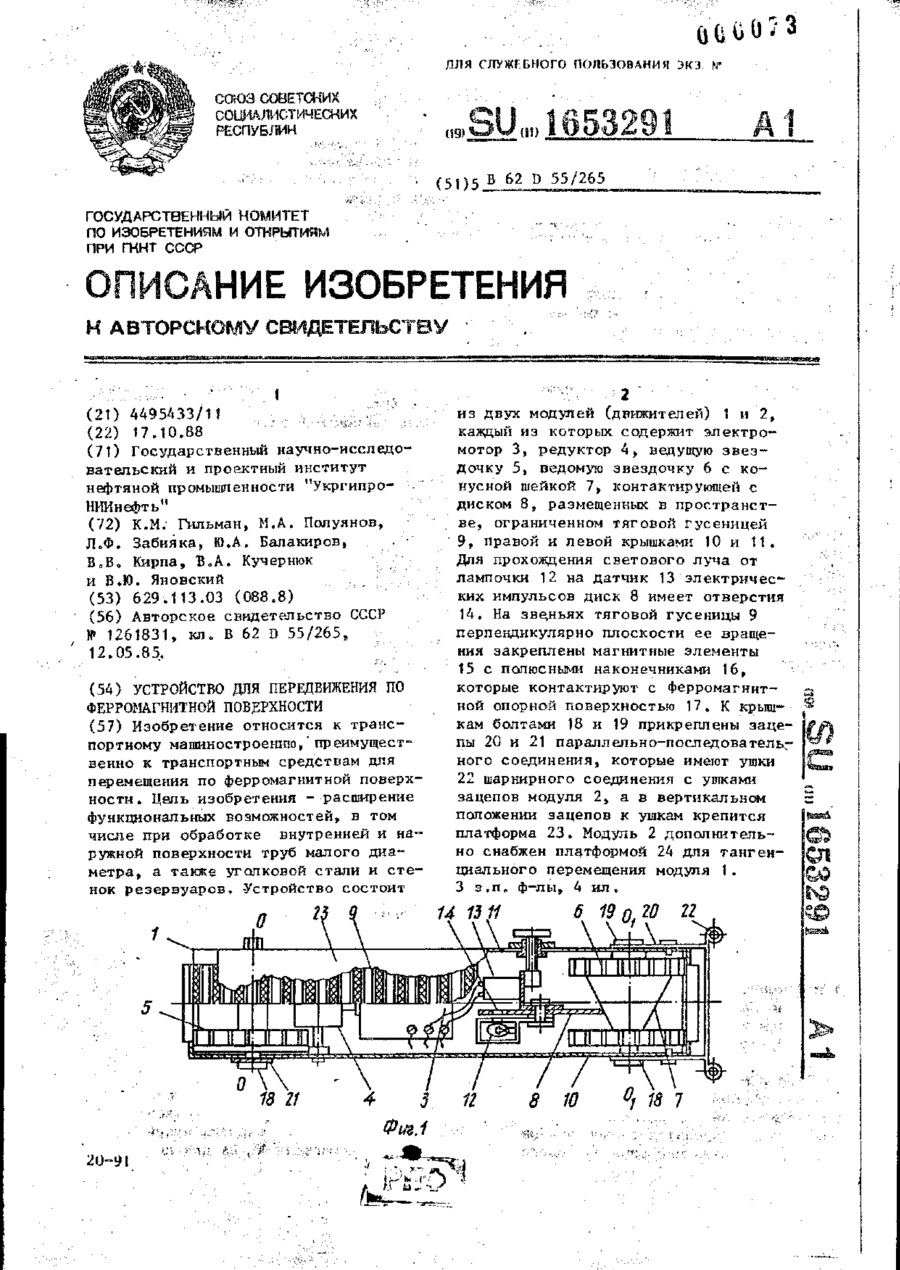
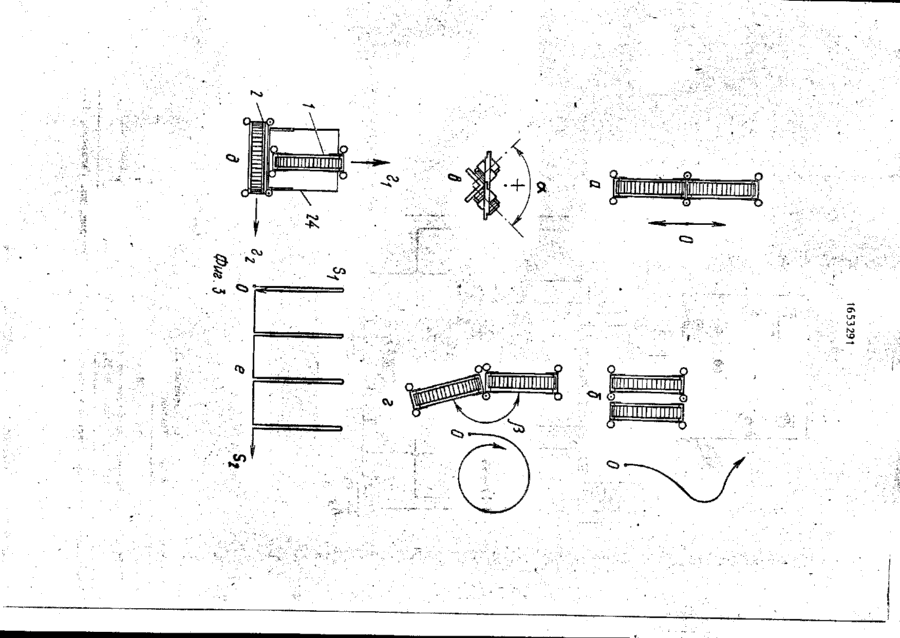
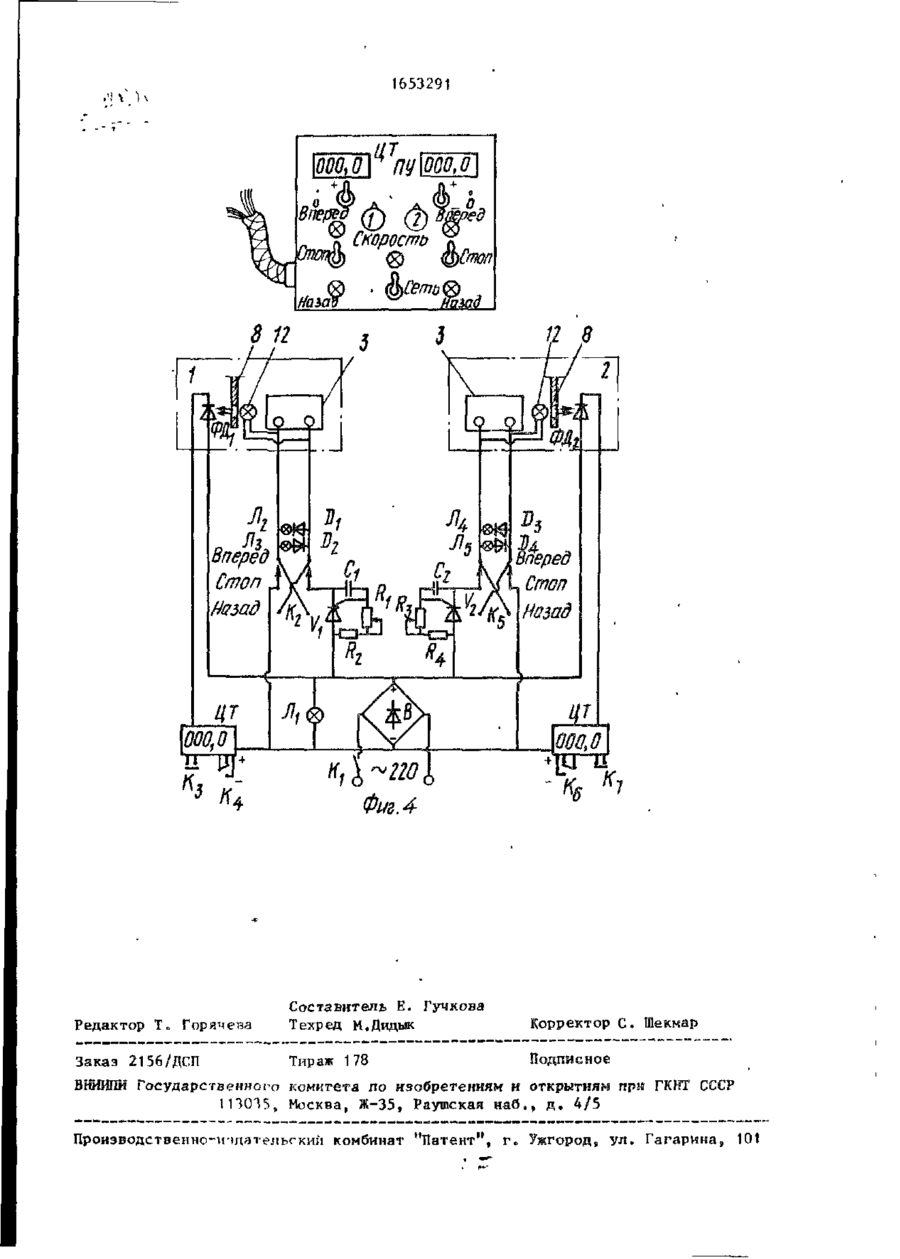
Изобретение относится к транспортному машиностроению,' преимущественно к транспортным средствам для перемещения по ферромагнитной поверхности. Цель изобретения - расширение функциональных возможностей, в том числе при обработке внутренней и наружной поверхности труб малого диаметра, а также уголковой стали и стенок резервуаров. Устройство состоит 8 18 21 Фиг.1 20-91 из двух модулей (движителей) 1 и 2, каждый из которых содержит электромотор 3, редуктор 4, ведущую з в е з дочку 5, ведомую звездочку 6 с конусной шейкой 7, контактирующей с диском 8, размещенных в пространстве, ограниченном тяговой гусеницей 9, правой и левой крышками 10 и 11. Для прохождения светового луча от лампочки 12 на датчик 13 электрических импульсов диск 8 имеет отверстия 14. На звеньях тяговой гусеницы 9 перпендикулярно плоскости ее вращения закреплены магнитные элементы 15 с полюсными наконечниками 16, которые контактируют с Ферромагнитной опорной поверхностью 17, К крышкам болтами 18 и 19 прикреплены зацепы 20 и 21 параллельно-последовательг ного соединения, которые имеют ушки 22 шарнирного соединения с утками зацепов модуля 2, а в вертикальном положении зацепов к ушкам крепится платформа 23, Модуль 2 дополнительно снабжен платформой 24 для тангенциального перемещения модуля 1. 3 з . п . ф-лы, 4 и л . 10 °i 18 7 1653291 Изобретение относится к транспорт ному машиностроению. ' Цель изобретения - расширение функциональных возможностей. На фиг„1 и 2 показано предлагаемое устройство, общий вид; на ф и г . З положения автономных модулей и траектории их движения; на фиг.4 - принципиальная электрическая схема уп10 равления модулями„ Устройство состоит из двух модулей (движителей) 1 и 2, каждый из которых содержит электромотор З в редуктор 4, ведущую звездочку 5» ведо- 15 мую звездочку 6 с конусной шейкой 7, контактирующей с диском 8, которые размещены в пространстве, ограниченном тяговой гусеницей 9» а также правой и левой крышками 10 и И . Для 20 прохождения светового луча от лампочки 12 на датчик 13 электрических импульсов диск 8 имеет отверстия 14. На звеньях тяговой гусеницы 9 перпендикулярно плоскости ее вращения 25 закреплены магнитные элементы 15 с полюсными наконечниками 16, которые контактируют с ферромагнитной опорной поверхностью 17О Для увеличения сил примагничивания к ферромагнитной 30 опорной поверхности наконечники 16 смежных элементов 15 ориентированы так, что их одноименные магнитные полюса обращены друг к другу о К крышкам 10 и 11 болтами 18 и 19 прикреплены зацепы 20 и 21 параллель- 35 но-последовательного соединения с возможностью их поворота вокруг осей 0-0 и 0^-0* соответственно ведущей 5 и ведомой 6 звездочек. При этом зацепы фиксируются в вертикальном или горизонтальном положении. Зацепы 20 и 21 имеют ушки 22 для шарнирного соединения с аналогичными (ответными) ушками зацепов второго мо45 дуля 2, а в вертикальном положении зацепов 20 и 21 к ушкам 22 предусмотрено крепление грузовой платформы 23. С помощью указанных зацепов модули 1 и 2 могут быть соединены последо50 вательно или параллельно, а также под углом друг к другу как Б вертикальной, так и в горизонтальной плоскостях. Второй модуль 2 дополнительно снабжен платформой 24 для тангенциального перемещения первого модуля 1. Платформа 24 крепится своими ушками к угакам 22 слева или справа второго 4 модуля 2. Нижняя часть платформы 24 контактирует с поверхностью 17 Устройство снабжено дистанционным 1 пультом управления, связанным с обоими модулями электрическим кабелем. Пуль содержит органы контроля и упраапения каждым модулем в отдельности, а именно: два цифровых табло для контроля пройденных расстояний S V H S 4 (при движении вперед - численное значение на табло увеличивается, а при движении назад - уменьшается), общий включатель и лампочку "Сеть", два переключателя с положениями "Вперед" - "Стоп" - "Назад", две ручки "Скорость", переключатель "Вправо-Влево" и четыре сигнальных мигающих лампочки (красные - "Вперед' 1 , синие - "Назад"). Перфорированный диск 8 вращается благодаря контакту с конусной шейкой 7, жестко прикрепленной к ведомой звездочке 6, приводимой во вращательное движение тяговой гусеницей 9. Диск 8 при повороте винта перемещается параллельно оси 0^-0^ конусной шейки 7 для изменения степени редукции. Это необходимо для изменения масштаба показаний (мм, см, м) пройденного расстояния на цифровом табло (ЦТ), а также для достижения соответствия показания табло с действительным пройденным устройством расстоянием. Перемещение диска 8 перпендикулярно оси шейки 7 осуществляется движением гайки вдоль паза. Датчик представляет собой фото- ' диод ФД,д, который открыт для прохождения постоянного электрического тока только в момент, когда на него попадает луч света от лампочки 12 через отверстие 14 диска 8 при его вращении. При этом через ф^.одиод прерывистый постоянный ток подается на Ц пульта управления (ПУ), покаТ зывающее сумму импульсов пропорционально пройденному устройством пути. П содержит включатель электриУ ческой сети К^» лампу Л(, выпрямитель тока В, регулятор скорости хода устройства, состоящий из тиристора V (, резисторов R ( и Rg и конденсатора С,, переключатель К 2 на три положения "Вперед-Стоп-Назад"» лампы Л а и Л 3 "Ход вперед" и "Ход назад" с диодами Д, и Д Ї соответственно, ЦТ с кнопкой Кз установки нулей на ЦТ и переключатель Кл. на два по 1653291 ложенил "+Расстояние вперед" в " - Р а с ры устройства и не понижая тягового стояние н а з а д " . Пульт управления с о е усилия. Исполнительное приспособление динен кабелем с модулем 1 . Два пропри этом -закрепляют на переднем з а вода подсоединены к электромотору 3 цепе или грузовой платформе 23 модуи два - к датчику импульсов (фотоля 1„ Устройство продвигается по внутдиод ФД^ и лампочка 12, между к о т о ренней поверхности трубы до заданного рыми размещен диск 8 ) , места, определяемого по ЦТ на пульте Схема управления модулем 2 а н а управления. Затем включают в работу логична описанной* Переключатели Kj- 10 приспособление для обработки поверхК4» лампы JI^-JIj, ручка резистора R^ ности, например краскопульт, и вклюи индикатор ЦТ» а также аналогичные чают тумблер "Назад" до выхода усторганы управления модулем 2 выведеройства из трубы. ны на переднюю панель пульта управП р и м е р 2 О Обработка наружной ления. поверхности труб, стальных уголков, а также площадей сложной конфигурации Устройство работает следующим (фиг.36, в ) . образом. Предварительно модули устройства Модули 1 и 2 с помощью зацепов соединяют т а к , что их расположение соединяют параллельно, а для более соответствует роду выполняемой рабо- 20 надежного примагничивания устройства ты. Затем на пульте управления уста-* к стальной поверхности, в частности» навливают положение тумблеров на к стальным уголкам или трубе, модули " С е т ь " и "Вперед". При этом на устанавливают еще и под некоторым у г электромотор 3 соответствующего молом $[, друг к другу в вертикальной дуля подают постоянный электрический 25 плоскости* т о к о Электромотор 3 через редуктор П р и м е р 3 . Обработка днищ или 4 приводит во врэщательное движени'е потолочной части резервуаров, а такведущую звездочку 5» которая увлекаже сферических крыш (фиГоЗг). ет за собой тяговую гусеницу 9 ч в е Модули 1 и 2 соединяют последовадомую звездочку 6 . Модуль перемещает30 тельно и устанавливают под некоторым ся вперед, прочно удерживаясь на феруглом jb друг к другу в горизонтальромагнитной опорной поверхности 17j /ной плоскости. При этом траектория благодаря взаимодействию последней движения устройства будет в виде спис полюсными наконечниками 16 магнитрали или круга в зависимости от ных элементов 15* программы5 заложенной на пульте уп35 равления. Конусная шейка 7 приводит во враП р и м е р 4 . Обработка вертищательное движение контактирующий с кальных стенок резервуаров (емкостей) ней диск 8, который своими отверстия(фигоЗд). ми 14 открывает прохождение светового луча от лампочки 12 к датчику 13. 40 Электрические импульсы, вырабатываеНа зацепах или грузовой платформые датчиком с частотой.» пропорциоме 23 модуля 1 устанавливают испопнальной ч а с т о т е вращения диска 8, нительный инструмент, например Kpscподаются на блок числового табло, к о копульт, а на модуле 2 крепят платторый суммирует эти импульсы. Датчик форму 24, на которой размещают мо13, лампочка 12 и"соединенный с нидуль 1 перпендикулярно модулю 2. ми диск 8 закреплены с возможностью Включают тумблер "Вперед" модуля 1, их перемещения параллельно оси конусподают краску в краскопульт и контроной шейки 7, благодаря чему обеспелируют движение вверх модуля 1 по ЦТ. чена возможность изменения степени Затем переводят тумблер в положение 50 редукции, а следовательно» изменения "Назад", при этом наносят второй масштаба измерения пройденного пути. слой краски по обратной траектории. П р и м е р 1. Обработка внутренПо положению ЦТ " 0 м определяют, что ней поверхности трубы с помощью с п е модуль 1 заходит на площадку платциальных приспособлений, установленформы 2 4 . После этого включают тумб55 лер "Вперед" модуля 2 и по ЦТ этого ных на устройстве ( ф и г . З а ) . , модуля определяют местоположение моМодули 1 и 2 соединяют последовадуля 2 с платформой 24, загруженной тельно с помощью зацепов20 и 2 1 , модулем 1, например 1 м от исходной уменьшая тем самым поперечные разме В 1653291 модуля разметены в пространстве, „трчки. Затем выключают модуль 2 и ограниченном верхней и кижігей частявключают модуль f. ми гусеничной ленты, а также ведуОписываемый цикл повторяют до тех пор, пока значение Ц модуля 2 соот- ^ щей и ведомой звездочками, при этом Т полюсные наконечники ленты каждого , ветствует значению длимы окружности модуля ориентированы одноименными резервуара. полюсами навстречу друг другу и закПрограммировать можно также и реплены перпендикулярно плоскости другие виды работ, например работу в обсадных колоннах нефтяных скважин. JQ вращения ленты. При этом нет необходимости внзуаль" 2. Устройство по п . 1 , о т л и но контролировать работу устройства ч а ю щ е е с я тем, что оно снабв трубе или внутри резервуара, так жено дистанционным пультом управлекак для этого достаточно следить за ния, связанном с каждым модулем электпоказаниями ЦТ на дистанционном пуль- 15 рическим кабелем. те управления. 3. Устройство по пп,1 и 2, о т Формула и з о б р е т е н и я л и ч а ю щ е е с я темІ что один 1. Устройство для передвижения из модулей снабжен платформой для по ферромагнитной поверхности, сотранспортировки другого. держащее модуль, включающий в себя I грузовую платформу, корпус» двигатель 4, Устройство по пп.1 - 3, о т с редуктором и пультом управления^ л н ч а ю щ е е с я тем, что оно ведущую и ведомую звездочки, окватыснабжено устройством измерения прой- • вающую их гусеничную ленту с закрепденного пути установленным, на каждом ленными на ней магнитными элементами 25 модуле между9 двигателем и ведомой с полюсными наконечниками, контактизвездочкой, выполненной из двух часрующими с опорной ферромагнитной потей, соединенных конусной шейкой, и , верхностью, о т л и ч а ю щ е е с я включающим в себя источник света, TSMS что„ с целью расширения функциодатчик., диск с отверстиями» контакнальных возможностей, оно снабжено ,^ тирующий торцом с конусной шейкой вторым однотипным модулем, каждый с возможностью вращения, закреплениз которых снабжен зацепами параллельные на корпусе с возможностью фиксино-последовательного соединенияs при руемого перемещения параллельно обэтом двигатель и редуктор каждого разующей конусной шейки. 'і* ) \ 1653291 Фиг. 4 Редактор То Горячева Составитель Е. Гучкова Техред М.Дидык Корректор С. Шекмар Заказ 2156/ДСП Тираж 178 В Ш И Государственного комитета по изобретениям и открытиям ш П 113015, Москва, Ж-35, Раушская наб., д . 4/5 Проиэводственно-ичдательгкин комбинат "Патент", г, Ужгород, ул. Гагарина,
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for displacement on ferromagnetic surface
Автори англійськоюHilman Kim Munevych, Poluianov MykhailoOleksandrovych, Zabiiaka Leonid Feodoseievych, Balakirov Yurii Airapetovych, Kirpa Volodymyr Volodymyrovych, Kucherniuk Valentyn Antonovych, Yanovskyi Vasyl Yuriiovych
Назва патенту російськоюУстройство для перемещения по ферромагнитной поверхности
Автори російськоюГильман Ким Муневич, Полуянов Михаил Александрович, Забияка Леонид Феодосеевич, Балакиров Юрий Айрапетович, Кирпа Владимир Владимирович, Кучернюк Валентин Антонович, Яновский Василий Юрьевич
МПК / Мітки
МПК: B62D 55/18
Мітки: пристрій, поверхні, ферромагнітній, переміщення
Код посилання
<a href="https://ua.patents.su/6-4029-pristrijj-dlya-peremishhennya-po-ferromagnitnijj-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Пристрій для переміщення по ферромагнітній поверхні</a>
Пристрій для переміщення і передачі виробів
Номер патенту: 338
Опубліковано: 30.04.1993
Автори: Бурлика Анатолій Пилипович, Гелев Георгій Наумович, Фрідман Роман Аркадійович, Ларіонов Михайло Тихонович, Кундін Станіслав Ісакович
МПК: B65G 47/53
Мітки: пристрій, переміщення, виробів, передачі
Формула / Реферат:
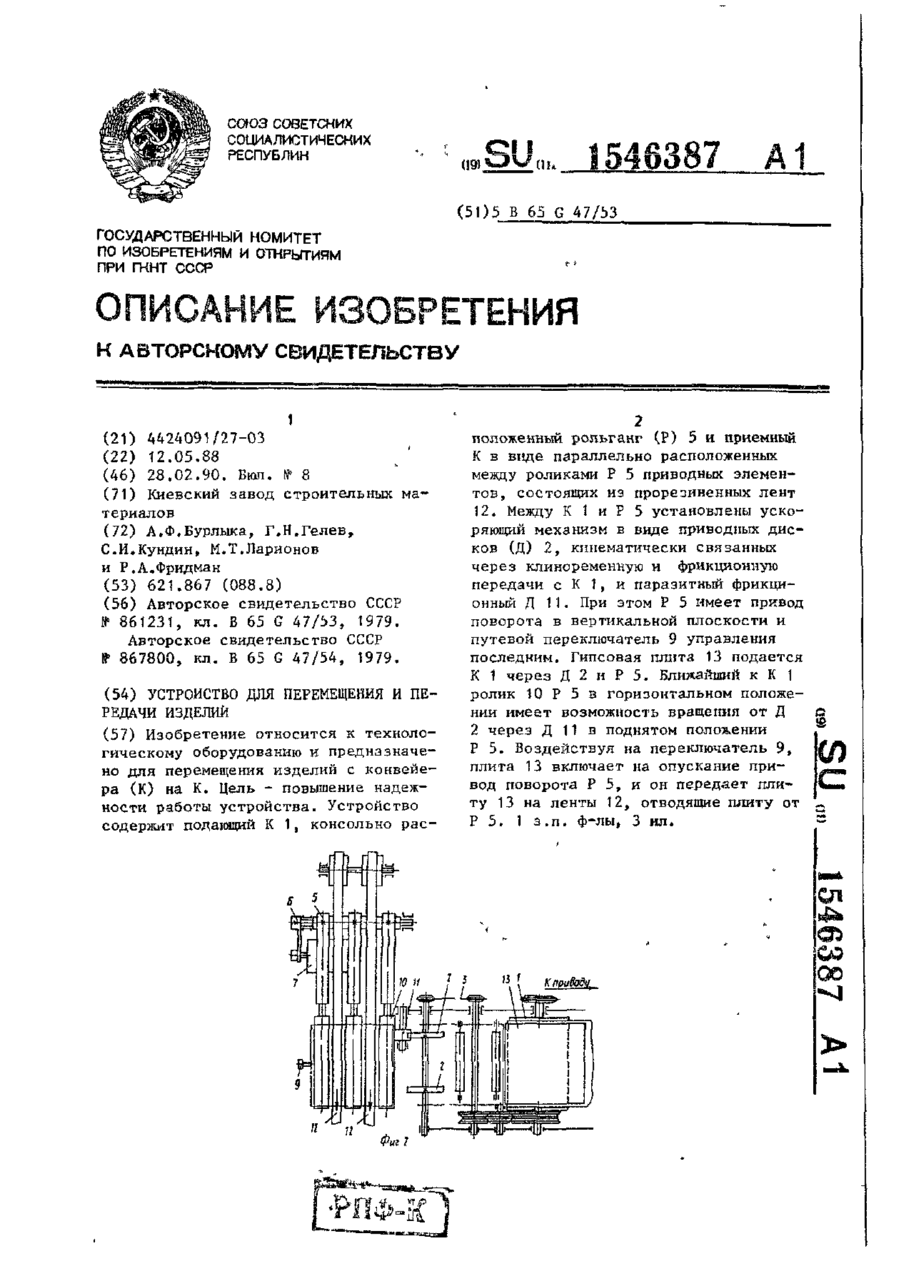
Ф о р м у л а и з о б р е т е н и я 1. Устройство для перемещения и передачи изделий, включающее подающий конвейер, консольно расположенный рольганг с приводом поворота в вертикальной плоскости и путевым переключателем управления последним и приемный конвейер в виде параллельно расположенных между роликами рольганга приводных элементов, о т л и ч а ю щ е е с я тем, что, с целью повышения надежности работы устройства, оно снабжено...
Пристрій для переміщення зварювальної головки
Номер патенту: 2640
Опубліковано: 26.12.1994
Автори: Молчанов Костянтин Вікторович, Хомін Ігор Богданович, Куляк Михайло Васильович
МПК: H01L 21/60
Мітки: головки, переміщення, зварювальної, пристрій
Формула / Реферат:
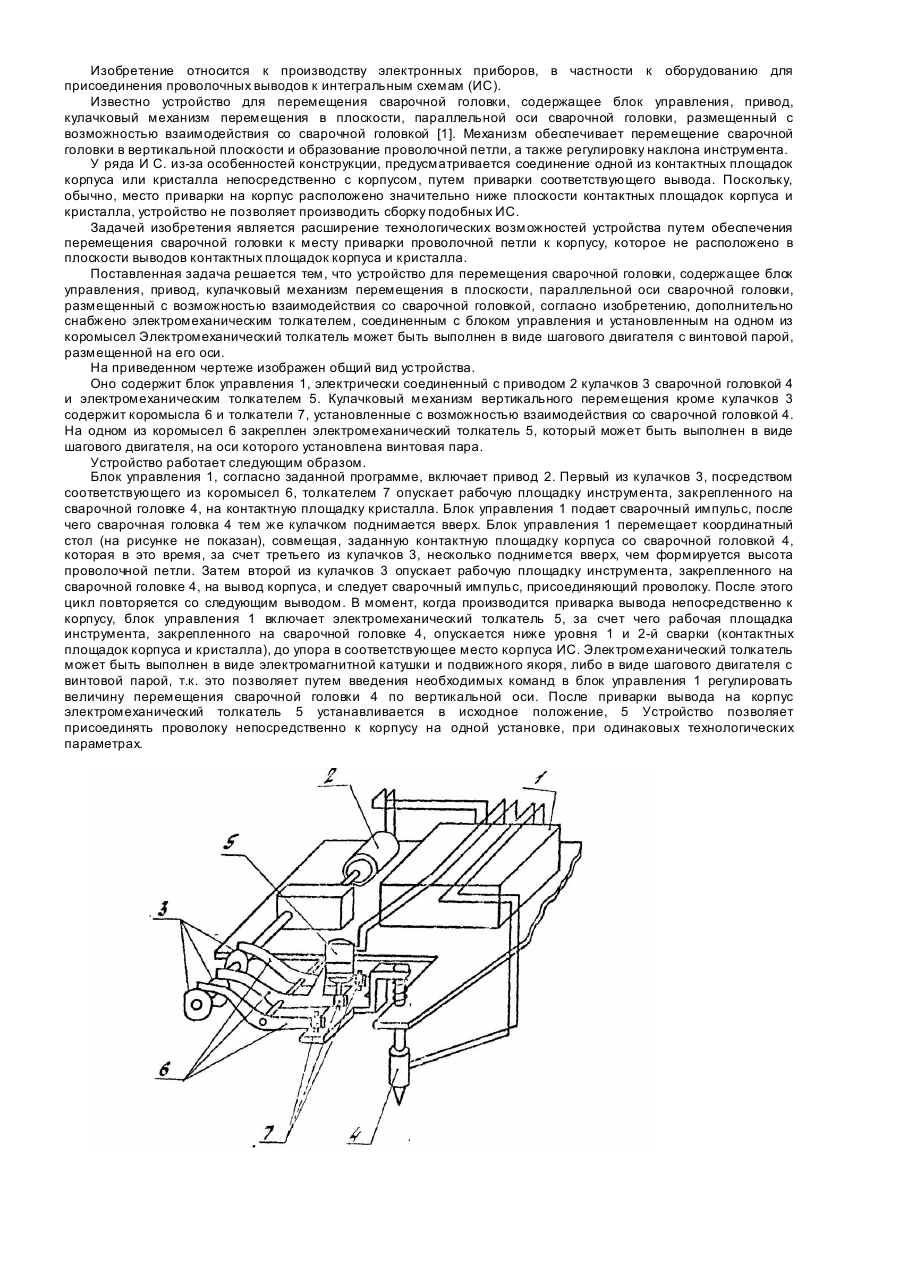
1. Устройство для перемещения сварочной головки, содержащее блок управления, привод, кулачковый механизм перемещения в плоскости, параллельной оси сварочной головки, размещенный с возможностью взаимодействия со сварочной головкой, отличающееся тем, что кулачковый механизм перемещения снабжен электромеханическим толкателем, соединенным с блоком управления и установленным на одном из коромысел.2. Устройство по п.1, отличающееся тем, что...
Пристрій для переміщення і обслуговування хворих
Номер патенту: 4475
Опубліковано: 27.12.1994
Автор: Монда Юрій Юрійович
МПК: A61G 7/10
Мітки: пристрій, переміщення, обслуговування, хворих
Формула / Реферат:
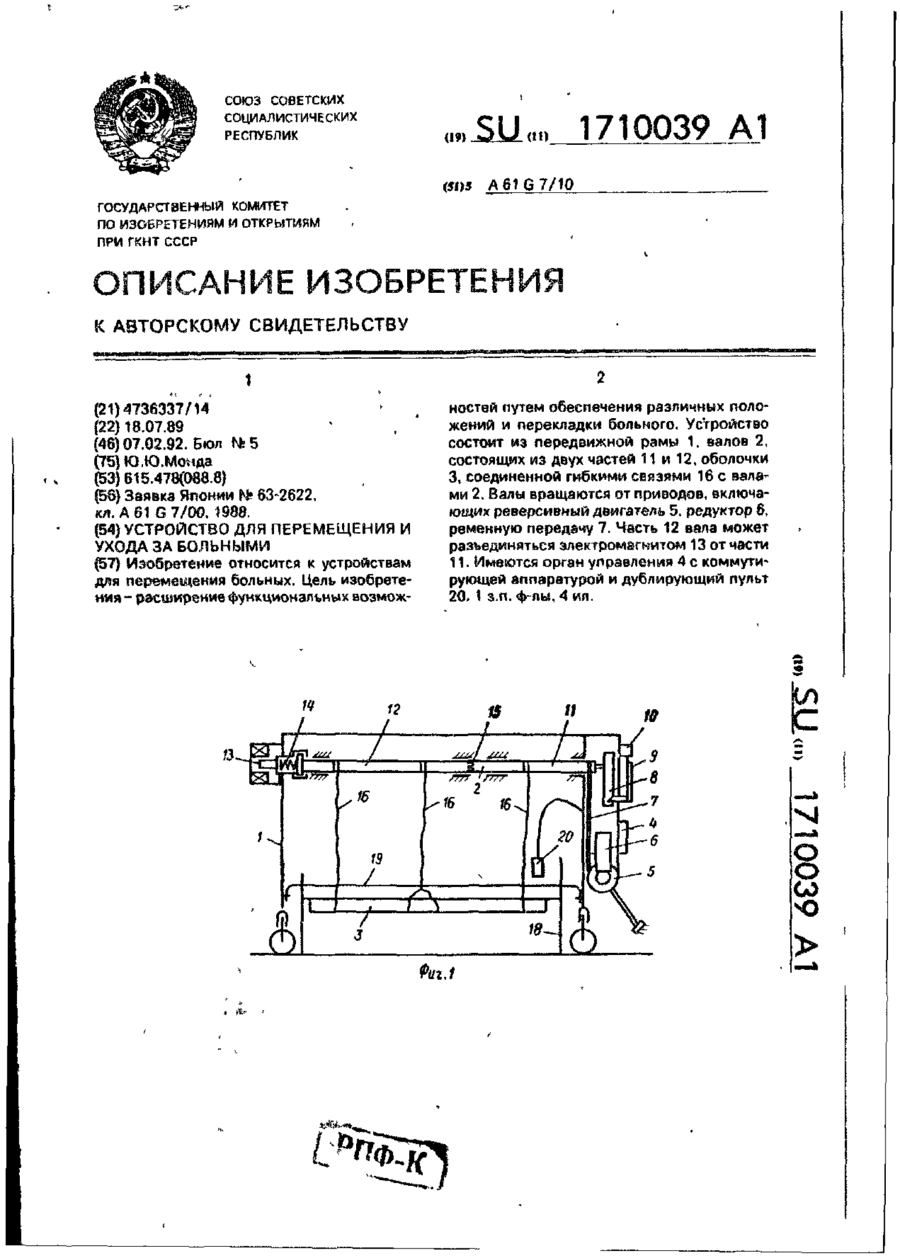
1. Устройство для перемещения и ухода за больными, содержащее передвижную раму с двумя валами, эластичную оболочку, установленную на валах, и органы управления, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения различных положений и перекладок больного, каждый вал снабжен реверсивным приводом, эластичная оболочка выполнена съемной, а соединение оболочки с валами выполнено в виде гибких связей.2....
Пристрій для змазування поверхні тертя
Номер патенту: 1407
Опубліковано: 25.03.1994
Автори: Сукачьов Володимир Леонідович, Дунаєвський Леонід Маркович, Ващенко Микола Миколайович, Бойчук Володимир Борисович, Матяш Віктор Олександрович, Шабадей Олександр Арсенійович
МПК: F16N 7/00
Мітки: поверхні, пристрій, тертя, змазування
Формула / Реферат:
Устройство для смазки поверхности трения, преимущественно вала и подшипника, содержащее резервуар, канал подачи смазки из резервуара к поверхности трения, запорный орган, установленный в резервуаре с возможностью открытия своей нижней частью канала подачи при воздействии на него тепла узла трения и включающий две внутренние, полости, одна из которых выполнена герметичной й заполнена легкоиспаряющимся агентом, а также ограничитель перемещения...
Пристрій для переміщення матеріалу в відвал
Номер патенту: 4487
Опубліковано: 27.12.1994
Автори: Бугайов Семен Петрович, Бугайов Сергій Семенович
МПК: E21C 47/00
Мітки: переміщення, матеріалу, відвал, пристрій
Формула / Реферат:
Устройство для перемещения материала в отвал, включающее отвалообразователь, рама ходового оборудования которого связана с рамой разгрузочной тележки отвального конвейера, отличающееся тем, что, с целью повышения надежности работы при продольной укладке пород в отвал, связь рамы ходового оборудования отвало-образоватсля с рамой разгрузочной тележки отвального конвейера выполнена в виде тяг, шарнирно связанных между собой с образованием...
Попередній патент: Капсуль конденсаторного мікрофона
Наступний патент: Спосіб одержання трифенілсульфонієвих солей
Випадковий патент: Спосіб виготовлення електроізоляційної трубки