Гідравлічна система управління
Номер патенту: 46532
Опубліковано: 15.05.2002
Автори: Пономаренко Анатолій Олександрович, Мокроуз Василь Климентійович
Формула / Реферат
1. Гідравлічна система управління, що містить живильну установку з електропривідним насосом і основним гідробаком з компенсаційно-підтисковим пристроєм, механізм управління, що включає електромеханічний перетворювач, гідропідсилювач, підживлюючі і запобіжні клапани, гідростопори і електромагніти управління гідростопорів, клапанну коробку з перемикачем режимів роботи і зворотними клапанами, гідроциліндр з двостороннім штоком, сполучений з гідроприводом стабілізатора гармати і з її ручним гідропідіймачем, яка відрізняється тим, що вузол гідростопора виконаний у вигляді запірного конічного клапана з розміщеним всередині нього підпружиненим розвантажувальним клапаном з можливістю переміщення його, а потім і запірного клапана плунжером електромагніта.
2. Система по п.1, яка відрізняється тим, що на ручному гідропідіймачі додатково встановлений гідробак, причому порожнина додаткового гідробака через додатково встановлений зворотний клапан сполучена з основним гідробаком.
Текст
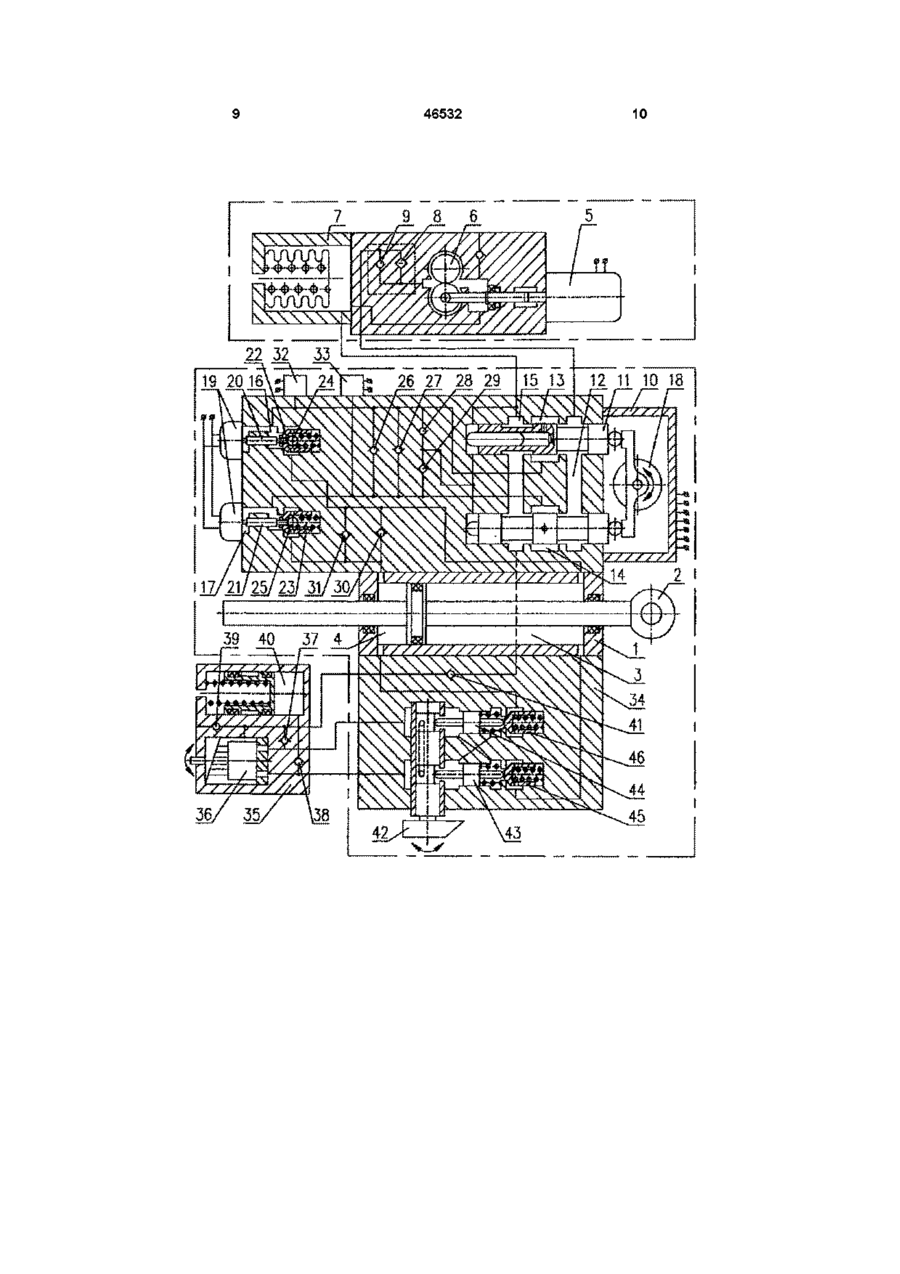
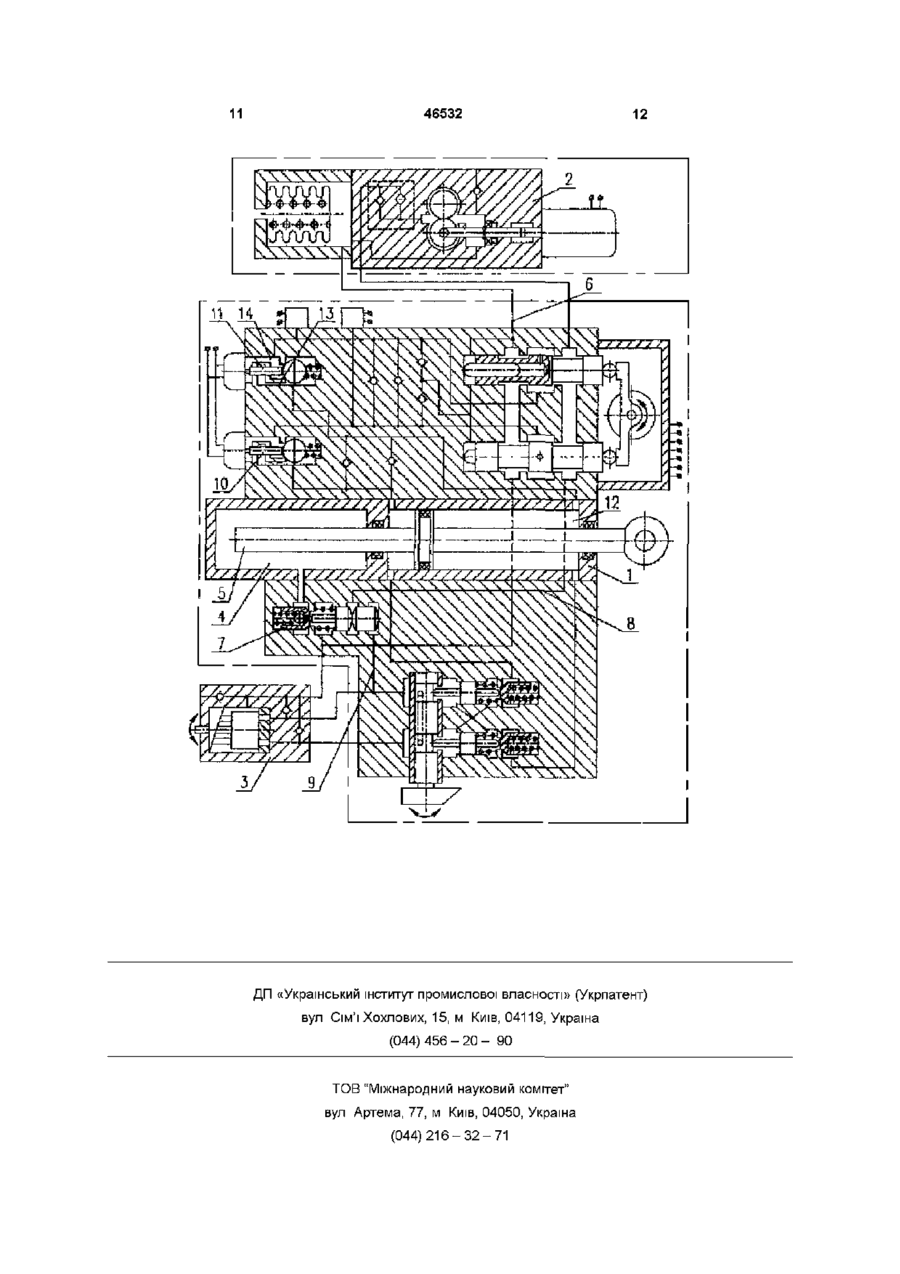
1 Гідравлічна система управління, що містить живильну установку з електропривідним насосом і основним пдробаком з компенсаційно-підтисковим пристроєм, механізм управління, що включає електромеханічний перетворювач, пдропідсилювач, ПІДЖИВЛЮЮЧІ І запобіжні клапани, пдростопори і електромагніти управління пдростопорів, клапанну коробку з перемикачем режимів роботи і зворотними клапанами, гідроциліндр з двостороннім штоком, сполучений з пдроприводом стабілізатора гармати і з и ручним пдропідіймачем, яка відрізняється тим, що вузол пдростопора виконаний у вигляді запірного конічного клапана з розміщеним всередині нього підпружиненим розвантажувальним клапаном з можливістю переміщення його, а потім і запірного клапана плунжером електромагніта 2 Система по п 1, яка відрізняється тим, що на ручному пдропідіймачі додатково встановлений гід робак, причому порожнина додаткового пдробака через додатково встановлений зворотний клапан сполучена з основним пдробаком Запропонований пристрій відноситься до електрогідравлічних систем управління і може бути використаний в машинобудуванні, переважно як виконавчий механізм управління наведенням зброї, змонтованої на транспортних засобах Найбільш широке застосування винахід може знайти в гідравлічних системах управління в танковій промисловості з істотним технічним і економічним ефектом В сучасних пристроях і системах управління зброєю, змонтованою на транспортних засобах, пред'являються жорсткі вимоги до надійності і ДОВГОВІЧНОСТІ вузлів приводної частини, забезпеченню безвідмовної роботи на всіх режимах експлуатації, до енергетичних і габаритно-масових характеристик ВІДОМІ гідравлічні приводні механізми, в яких кут піднімання ствола змінюється і фіксується циліндром з поршнем, який має, наприклад, отвір, що закривається і крізь який робоча рідина для зміни положення ствола перетікає із камери, розміщеної з одного боку поршня, в камеру на ІНШІЙ стороні при відкритому отворі, а для фіксації ствола при визначеному куті підняття отвір закривається (1) Відоме управління гідравлічними пристроями установлення положення зброї танка електричними засобами з використанням електронної апара тури для обробки даних про рух і місцезнаходження танка, які необхідні для наведення зброї Системи управління вогнем для підвищення надійності можуть містити підсистеми, що автономно функціонують і зв'язані пристроями сполучення (2) Відомий пристрій управління зброєю, що містить блок управління з багатошвидкісним гідравлічним двигуном, за допомогою якого здійснюється наведення зброї Подача гідравлічної рідини до пдродвигуна регулюється гідравлічною слідкуючою системою, робота якої визначається величиною і напрямом електричного сигналу, що надходить до неї від командного блоку, який містить потенціометр і підсилювач Пристрій містить блок ручного управління для установлення положення потенціометра з метою зміни швидкості і напряму наведення зброї Для зміни режиму роботи гідравлічного двигуна існує блок управління двигуном При установленні потенціометра в проміжне положення наведення зброї відбувається з відносно малою швидкістю, при установленні в крайнє положення - з відносно великою (3) ВІДОМІ електрогідравлічні системи управління зброєю, змонтованою на транспортних засобах, наприклад, системи управління виконавчим механізмом наведення гармати танка, що передбачають роботу в автоматичному і ручному режимах, со Ю (О 46532 пдростопоршня і похідний режим, в яких управління здійснюється по електричним командам, які виробляє бортова електронно-обчислювальна машина (ЕОМ) після обробки необхідних даних, що містять живильну установку з гідравлічним баком, механізм управління з блоком пдропідсилювача, запобіжні, зворотні та ІНШІ клапани, замки пдростопорів, ручний пдропідіймач, гідроциліндр із двостороннім штоком, серед яких аналогом технічного рішення, що заявляється є, наприклад, пристрій управління для механізму наводки гармати, що має електрогідравлічні контури наводки і стабілізації, зв'язані в блок управління В схемі передбачене управління в режимах автоматичному, ручному і в режимі стабілізації Тиск робочої рідини створюється реверсивним насосом регульованої подачі Подача робочої рідини регулюється електрокерованим чотирипоясковим ходовим сервоклапаном, що зв'язує схематично напірний і зливний трубопроводи На першу ступінь сервоклапана керуючий тиск подається крізь вмикальний клапан, підключений до напірного трубопроводу і електрокерований логічною схемою SL Сервоклапан керується контуром KRK наводки і контуром SK стабілізації через електронний регулятор RE В контурі наводки, захищеному двома клапанами обмеження тиску, передбачені два керованих зворотних клапана Технічне рішення дало змогу зменшити габарити пристрою Застосування сервоклапана зменшило можливість не контрольованого переміщення зброї (4) З приведеного дослідження рівня техніки слідує, що для такого калібру зброї на транспортному засобі, яким є гармата танка, найбільш прийнятної є електрогідравлічна схема управління приводом наведення, яка частіше використовує як виконавчий елемент гідроциліндр, подача робочої рідини в порожнині якого здійснюється в залежності від електричного сигналу, сформованого логічним блоком і поданого на пристрій управління клапанами Передбачається можливість і ручного управління Незважаючи на різноманітність технічних рішень, залишаються проблеми підвищення надійності, живучості керуючих систем, поліпшення габаритно-масових характеристик, зменшення не контрольованого переміщення зброї в зв'язку з появою підвищених вимог до нових розробок бойових машин Найбільш близьким прототипом запропонованого винаходу є гідравлічна система управління гармати, яка має переваги в порівнянні з відомими аналогами, принципова схема якої приведена в Додатку 1 до матеріалів заявки (5) Система містить робочий двоштоковий гідроциліндр 1 (далі в заявці -гідроциліндр з двостороннім штоком), сполучений з пдроприводом стабілізатора гармати і з її ручним гидропідйомним механізмом 3 (далі в заявці ручний пдропідіймач), живильну установку 2 і відрізняється тим, що, з метою підвищення ефективності роботи, корпус робочого двоштокового гідроциліндра виконаний ступінчастим, при цьому додаткова ступінь корпусу 4, в якій розміщений вільний кінець штоку 5, сполучена з ЛІНІЄЮ зливу 6 через керований зворотний клапан 7, підключений до пдроприводу стабілізатора гармати ЛІНІЄЮ 8 і до ручного пдропідйомного механізму ЛІНІЄЮ 9 Даний прототип хоч і має переваги в порівнянні з відомими аналогами, однак ряд його істотних недоліків, не дозволяє досягнути технічного результату по поставленій задачі До них належать такі як 1 Наявність значного самоходу гармати при відключених автоматичній і ручній системах управління під впливом неврівноваженого моменту гармати через наявність гарантованого зазору по золотниках 10 і 11 електромагнітів пдростопорів Так, наприклад, при зазорі 0,006 0,010 мм по золотниках пдростопорів самохід гармати складає до 12 мм/мін, а зменшення зазорів нижче за 0,006 - 0,010 мм приводить до нестабільної роботи пдростопорів При прикладенні навантаження, наприклад, на висунення штоку, в робочій порожнині 12 гідроциліндра 1 створюється тиск, під впливом якого робоча рідина витісняється по каналу 13, через гарантований зазор золотника 11 в порожнину 14 електромагніту і далі через кромки золотника пдропідсилювача в ЛІНІЮ зливу 6 і бак Через наявність витоків відбувається переміщення штоку гідроциліндра При ЗМІНІ знаку навантаження на штоку відбувається його переміщення на втягування аналогічним образом 2 Низька живучість гідросистеми через наявність гумових рукавів, що з'єднують живильну установку і ручний пдропідйомний механізм з гідроциліндром 3 Відсутність резервування ручної системи управління при ВІДМОВІ автоматичного управління При пориві гумових шлангів або розгерметизації пдробаку відбувається одночасна відмова як автоматичної, так і ручної (аварійної) систем управління, оскільки ручний пдропідйомний механізм сполучений також з основним пдробаком 4 Низька надійність і порівняно малий ресурс, наприклад 250 годин, гідравлічної системи управління через наявність перетікання робочої рідини з порожнини додаткової ступіні корпусу гідроциліндра (третьої порожнини) в пдробак і зворотно при роботі як в автоматичному, так і в ручному (аварійному) режимах управління, що приводить до швидкого зносу елементів сільфонного компенсаЦІЙНО-ПІДТИСКОВОГО пристрою, розміщеного в пдробаку, який відпрацьовує переміщення еквівалентні об'єму робочої рідини, витісненою і відібраною третьою порожниною В основу винаходу поставлено завдання удосконалення гідравлічної системи, взятої за прототип, шляхом зміни відомих і введення нових елементів, за рахунок чого забезпечується зменшення не контрольованого переміщення гармати, поліпшення габаритно-масових характеристик, підвищення живучості, надійності і ресурсу, можливість незалежної роботи ручним пдропідіймачем при ВІДМОВІ автоматичного режиму роботи системи Поставлене завдання досягається тим, що в гідравлічної системі управління, що містить живильну установку з електроприводним насосом і основним пдробаком з компенсаційно-підтисковим пристроєм, механізм управління, що включає електромеханічний перетворювач, пдропідсилювач, ПІДЖИВЛЮЮЧІ і запобіжні клапани, пдростопори і 46532 електромагніти управління пдростопорів, клапанну коробку з перемикачем режимів роботи і зворотними клапанами, гідроциліндр з двостороннім штоком, сполучений з пдроприводом стабілізатора гармати і з и ручним пдропідіймачем, згідно з винаходом вузол пдростопору виконаний у вигляді запірного конічного клапана з розміщеним всередині нього під пружиненим розвантажувальним клапаном з можливістю переміщення його, а потім і запірного клапана плунжером електромагніту, а на ручному пдропідіймачу додатково встановлений пдробак, причому порожнина додаткового пдробаку через додатково встановлений зворотний клапан сполучена з основним гідробаком В запропонованої гідравлічної системі управління між ВІДМІТНИМИ ознаками і технічним результатом, що досягається, є причинно-слідчий зв'язок 1 За рахунок застосування зміненої конструкції вузла пдростопору, виконаного у вигляді запірного конічного клапана з розміщеним всередині нього під пружиненим розвантажувальним клапаном з можливістю переміщення його, а потім і запірного клапана плунжером електромагніту при подачі на нього електричних керуючих сигналів, практично усунений самохід штоку гідроциліндра при прикладенні до нього знакозмінних навантажень через відсутність в схемі каналу 13, що сполучує порожнини гідроциліндра через зазори золотника 11, порожнину 14, кромки золотника пдропідсилювача з ЛІНІЄЮ зливу 2 Підвищення надійності і ресурсу гідросистеми, забезпечення незалежної роботи ручним пдропідіймачем досягнуте шляхом установлення на пдропідіймачі додаткового пдробаку, порожнина якого через додатково встановлений зворотний клапан сполучена з основним гідробаком, а також шляхом виключення додаткового ступеня корпусу гідроциліндра, в якому в прототипі розміщений вільний кінець штоку Зворотний клапан призначений для вирівнювання тиску в пдробаках і відсікання основного пдробаку від додаткового у разі розгерметизації основного пдробаку 3 Усунені високочастотні переміщення елементів компенсаційно-підтискового пристрою, розміщеного в основному пдробаку, що приводили до їх швидкого зносу, через відсутність додаткового ступеня корпусу гідроциліндра, переміщення в якій вільного кінця штоку приводили до змін об'єму робочої рідини в основному пдробаку Таке технічне рішення дало змогу підвищити ресурс системи, що заявляється, до 500 годин безвідмовної роботи тоді як ресурс в прототипі становить 250 годин На кресленні зображена принципова схема пропонованої гідравлічної системи управління, на якій показані гідроциліндр 1, що містить двосторонній шток 2, утворюючий з корпусом циліндра робочі порожнини 3 і 4, живильна установка, що містить електродвигун 5, з'єднаний з насосом 6, основної пдробак 7, фільтр 8, перепускний клапан фільтра 9, механізм управління 10, що містить пдропідсилювач 11, порожнина 12 якого сполучена через робочі щілини з розточками 13, 14 і 15, розточки 13 і 14, в свою чергу, сполучені з розточками 16 і 17 ВІДПОВІДНО, електромеханічний перетворювач 18, електромагніти 19 управління пдростопорів, виконаних у вигляді плунжерів 20 і 21 і підпружинених запірних конічних клапанів 22 і 23, всередині яких розміщені розвантажувальні клапани 24 і 25, запобіжні клапани 26 і 26 насоса 6, ПІДЖИВЛЮЮЧІ клапани 28 і 29, запобіжні клапани ЗО і 31 гідроциліндра, датчики тиску 32 і 33, клапанна коробка 34, яка сполучена за допомогою гумових рукавів з ручним пдропідіймачем 35, що містить гідронасос 36, ПІДЖИВЛЮЮЧІ клапани 37 і 38, заправний клапан 39, додатковий пдробак 40, робоча порожнина якого сполучена з картерною порожниною гідронасоса 36 і через зворотний клапан 41 з порожниною основного пдробаку 7, в коробці розміщені перемикач режимів роботи 42, в якому встановлені підпружинені штовхачі 43 і 44 із зворотними клапанами 45 і 46 Гідравлічна система управління працює в таких режимах 1 Автоматичному - коли переміщення штоку гідроциліндра здійснюється по електричних командах, що поступають на електромеханічний перетворювач 2 Ручному (аварійному) - коли при ВІДМОВІ автоматичної системи управління переміщення штоку гідроциліндра здійснюється оператором при допомозі ручного пдропідіймачу 3 Гідростопоршня (утримання) - коли гідроциліндр застопорений пдростопорами 4 Похідному - коли гармата механічно застопорена, а робочі порожнини гідроциліндра закільцьовані між собою Робота гідросистеми управління в автоматичному режимі здійснюється таким чином При подачі напруги живлення, наприклад 27 В, одночасно на клеми електродвигуна 5 і електромагніти 19 відбувається обертання насоса 6, який всмоктує робочу рідину з основного пдробаку 7 і одночасно нагнітає II в порожнину 12 пдропідсилювача 11,і яка, проходячи робочі щілини золотників пдропідсилювача, подається в розточки 13 і 14, потім в розточки 16 і 17 і через відкриті плунжерами 20 і 21 запірні КОНІЧНІ клапани 22 і 23 в робочі порожнини 3 і 4 гідроциліндра 1 Так як керуючі електричні сигнали ще не поступають на електромеханічний перетворювач 18, то шток 2 залишається нерухомим, а робоча рідина при цьому зливається через робочі щілини золотників пдропідсилювача і розточку 15 в основної пдробак 7 При надходженні електричних сигналів управління від бортової ЕОМ на електромеханічний перетворювач 18 відбувається переміщення золотників пдропідсилювача 11 пропорційне керуючому сигналу і відповідне ЗМІНІ В розточках 13 і 14 прохідних перетинів робочих щілин, що розподіляють потік робочої рідини в робочі порожнини 3 і 4 гідроциліндра, що спричиняє переміщення штоку 2 в тій або інший бік з швидкістю пропорційною керуючому сигналу При відсутності навантажень на штоку 2 гідроциліндра 1 здійснюється режим неробочого ходу, в якому енергоспоживання мінімальне При наявності навантаження на штоку 2 тиск за насосом 6 зростає до величини пропорційній навантаженню, 46532 яке забезпечує заданий режим роботи насоса При перевищенні навантаження більш встановленої величини відбувається спрацювання запобіжних клапанів 26 або 27, які перепускають робочу рідину в З або 4 робочу порожнину гідроциліндра 1, сполучену в цей час через робочі щілини золотників пдропідсилювача 11 з основним пдробаком 7, тим самим захищаючи насос 6 від руйнування При переміщенні штоку 2 з великими швидкостями від впливу на нього ЗОВНІШНІХ динамічних навантажень відбувається спрацювання підживлюючих клапанів 28 або 29, що здійснюють підживлення робочих порожнин гідроциліндра від основного пдробаку 7 і що забезпечують нерозривність потоку робочої рідини Гідростопоршня штоку 2 гідроциліндра здійснюється по спеціальній команді, що виробляється бортовою ЕОМ, яка знімає напругу живлення з клем електромагнітів 19, при цьому плунжери 20 і 21 втягуються, а під впливом пружин запірні КОНІЧНІ клапани 22 і 23 встановлюються в свої сідла і відсікають робочі порожнини 3 і 4 гідроциліндра 1 від насоса 6, при цьому шток 2 загальмовується При подачі напруги живлення, наприклад 27 В, на електромагніти 19, плунжери 20 і 21 переміщують розвантажувальні клапани 24 і 25, відкриваючи прохід робочої рідини від пдропідсилювача 11 в робочі порожнини 3 і 4 гідроциліндра 1, при цьому розвантажуються запірні КОНІЧНІ клапани 22 і 23, які також при цьому відкриваються плунжерами 20 і 21, відновлюючи автоматичний режим управління Робота гідравлічної системи управління в ручному (аварійному) режимі здійснюється таким чином При відсутності напруги живлення одночасно на клемах електродвигуна 5, електромагнітів 19 автоматично здійснюється перехід гідросистеми управління на ручний режим роботи, оскільки при відсутності напруги живлення на електромагнітах 19 запірні КОНІЧНІ клапани 22 і 23 встановлюються в свої сідла під впливом пружин і відсікають робочі порожнини 3 і 4 гідроциліндра 1 від пдропідсилювача 11 Управління штоком 2 тепер здійснюється від ручного пдропідіймачу 35 При обертанні вала гідронасоса 36 по або проти годинникової стрілки під впливом тиску робочої рідини відкривається зворотний клапан, наприклад 45, тоді через штовхач 44 відкривається клапан 46 Під впливом тиску робочої рідини, що поступає від зворотного клапана 45 в порожнину 3, шток 2 переміщується, наприклад ліворуч, витісняючи робочу рідину з по 8 рожнини 4 через відкритий зворотний клапан 46 на вхід в гідронасос 36 При ЗМІНІ напряму обертання вала гідронасоса 36 розподіл робочої рідини в порожнині 3 і 4 здійснюється аналогічним чином При виникненні досить великих швидкостей на штоку 2 від дії динамічних навантажень об'єкта підживлення робочих порожнин 3 і 4 здійснюється через ПІДЖИВЛЮЮЧІ клапани 37 і 38 ручного пдропідіймачу 35, сполучені з додатковим пдробаком 40 В режимі гідростопоршня (утримання), коли гідроциліндр 1 застопорений запірними конічними клапанами 22 і 23, при рушенні об'єкта по пересіченій місцевості на штоку 2 виникають досить великі інерційні навантаження При виникненні на штоку 2 навантаження, наприклад, що перевищує настройку запобіжного клапана ЗО, шток 2 починає переміщатися на висунення, при цьому робоча рідина з порожнини З через клапан ЗО, що відкрився, перетікає в порожнину 4 При ЗМІНІ знаку навантаження на штоку 2 робота здійснюється аналогічним чином У похідному режимі, коли гармата застопорена механічними упорами, а внаслідок наявності люфтів можливі незначні переміщення штоку 2, для зняття навантажень в робочих порожнинах 3 і 4 гідроциліндра передбачено кільцювання цих порожнин за допомогою перемикача 42 При повороті перемикача 42, наприклад, на кут 60°, відбувається переміщення штовхачів 43, 44 і відкриття клапанів 45, 46, при цьому порожнини 3 і 4 сполучаються між собою, забезпечуючи перетікання робочої рідини з однієї в іншу Технічне рішення, що заявляється, має винахідницький рівень, оскільки явним чином не слідує з рівня техніки, і є промислово застосовним У цей час по запропонованому пристрою "Гідравлічна система управління" здійснені випробування дослідних зразків, які показали їх технічну придатність ВИКОРИСТАНІ ДЖЕРЕЛА 1 Заявка № 0281767 на Європейський патент, кл F4IF 23/32, 21/04, 1988 2 Заявка ФРН№ 3613097, кл F4IG 5/24, 1988 3 Патент США № 4558827, кл F4IG 5/02, 1985 4 Патент ФРН №3538858, кл F4IG 5/04, 1986 5 Збірник рефератів винаходів, серія З, вип 15, М , ЦНІІнформ , 1978, авт свід СРСР № 94177, кл F15B9/00, 1975 46532 10 11 46532 12 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюPonomarenko Anatolii Oleksandrovych, Mokrouz Vasyl Klymentiiovych
Автори російськоюПономаренко Анатолий Александрович, Мокроуз Василий Климентьевич
МПК / Мітки
МПК: F41G 5/00
Мітки: управління, система, гідравлічна
Код посилання
<a href="https://ua.patents.su/6-46532-gidravlichna-sistema-upravlinnya.html" target="_blank" rel="follow" title="База патентів України">Гідравлічна система управління</a>
Об’єднана гідравлічна система транспортного засобу
Номер патенту: 21378
Опубліковано: 02.12.1997
Автори: Восковец Сергій Валентинович, Заграновський Ілля Васильович, Чайковський Валерій Станіславович, Подригало Михайло Абович, Войчак Григорій Васильович, Рудий Леонід Хомич, Лисенко Анатолій Миколаєвич
МПК: B60T 13/10
Мітки: гідравлічна, транспортного, об'єднана, система, засобу
Формула / Реферат:
Об'єднана гідравлічна система транспортного засобу, яка складається з гідробака, гідронасоса, запобіжного клапана, розподільчої апаратури і послідовно включених не менше трьох споживачів енергії, яка відрізняється тим, що споживач, на роботу якого впливає величина тиску в зливній гідролінії, під'єднується в гідросистемі відносно інших споживачів останнім, а гідророзподільник з плаваючим положенням золотника з'єднує поршневу і штокову...
Гідравлічна система керування
Номер патенту: 37034
Опубліковано: 16.04.2001
Автори: Павлюк Євген Вікторович, Волковський Сергій Валентинович, Пономаренко Анатолій Олександрович, Мокроуз Василь Климентійович
МПК: F41G 5/00
Мітки: керування, система, гідравлічна
Формула / Реферат:
Гідравлічна система керування, що містить сполучені між собою гідропідсилювач, ручний гідропідіймач, гідробак і гідроциліндр з двостороннім штоком, вільний кінець якого утворює спільно з додатковим ступенем корпусу третю порожнину гідроциліндра, сполучену з гідробаком крізь керований зворотний клапан, приєднаний до ручного гідропідіймача і гідропідсилювача, шток має внутрішню порожнину, в якій розміщений поршень, який розділяє внутрішню...
Гідравлічна система управління силовим приводом суднової рульової машини
Номер патенту: 6250
Опубліковано: 29.12.1994
Автор: Дьокін Борис Григорович
МПК: B63H 25/06
Мітки: суднової, силовим, приводом, система, машини, гідравлічна, управління, рульової
Формула / Реферат:
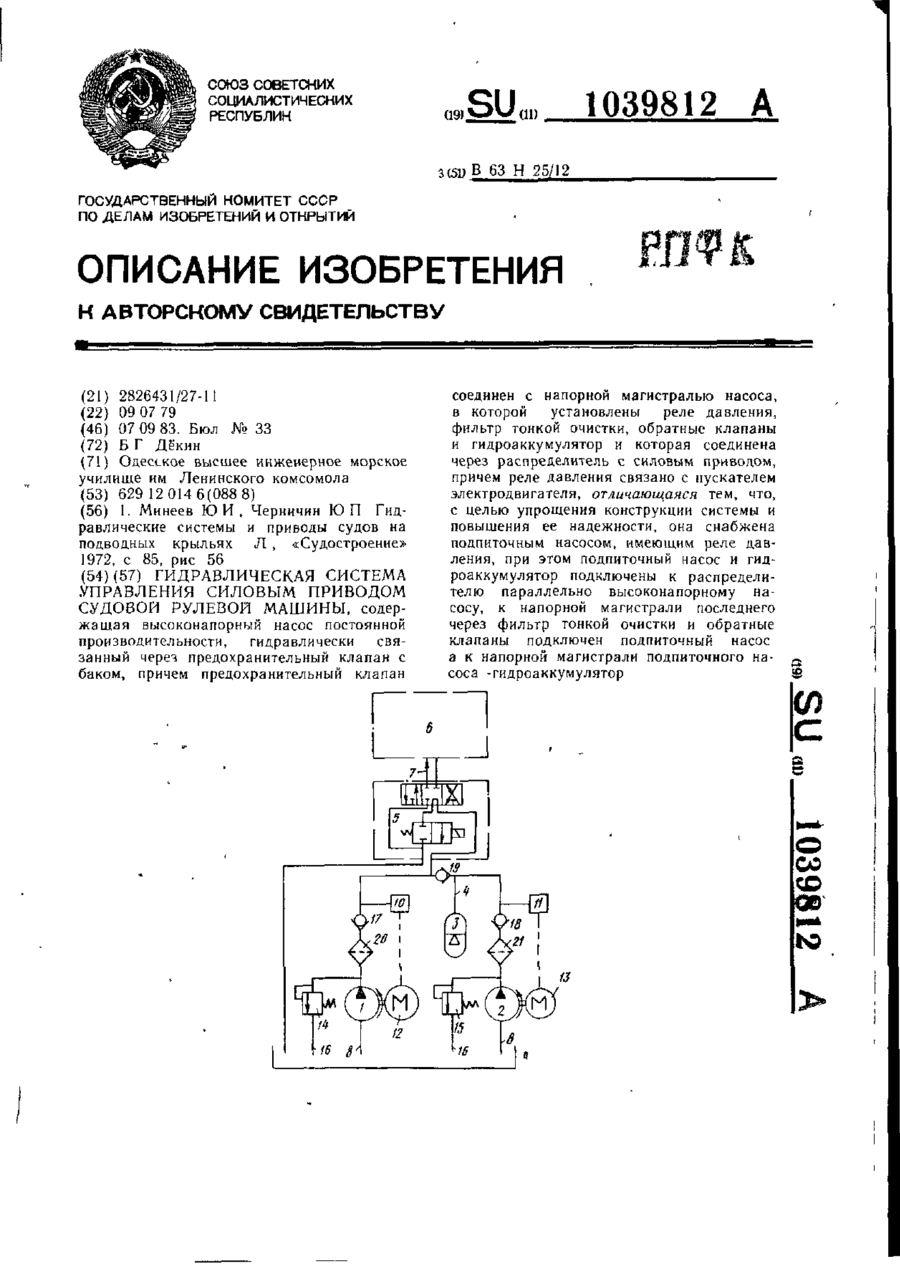
Гидравлическая система управления силовым приводом судовой рулевой машины, содержащая высоконапорный насос постоянной производительности, гидравлически связанный через предохранительный клапан с баком, причем предохранительный клапан соединен с напорной магистралью насоса, в которой установлены реле давления, фильтр тонкой очистки, обратные клапаны и гидроаккумулятор и которая соединена через распределитель с силовым приводом, причем...
Об’єднана гідравлічна система транспортних засобів
Номер патенту: 10635
Опубліковано: 25.12.1996
Автори: Рудий Леонід Фомич, Восковец Сергій Валентинович, Подригало Михайло Абович, Заграновський Ілля Васильович, Чайковський Валерій Станіславович, Войчак Григорій Васильович
МПК: B60T 13/10
Мітки: засобів, система, транспортних, об'єднана, гідравлічна
Формула / Реферат:
Об'єднана гідравлічна система транспортних засобів, що складається з одного гідробака із якого робоча рідина одним гідронасосом введена безпосередньо через розподільник гальма і в гідравлічну систему гальма і в гідравлічну систему рульового управління, а також мас гідравлічну систему навіски, яка відрізняється тим, що між гідравлічною системою рульового управління і гідравлічною системою навіски встановлений додатковий двохпо-зиційний...
Гідравлічна система рульового управління транспортного засобу
Номер патенту: 15953
Опубліковано: 29.08.1997
Автори: Завгородній Віталій Євгенович, Кузьмінов Вадим Георгійович, Пономарьов Володимир Миколайович, Соболєв Анатолій Ігорович, Анюхін Володимир Михайлович, Умеренко Аркадій Аркадійович
МПК: B62D 5/06
Мітки: система, засобу, рульового, транспортного, гідравлічна, управління
Формула / Реферат:
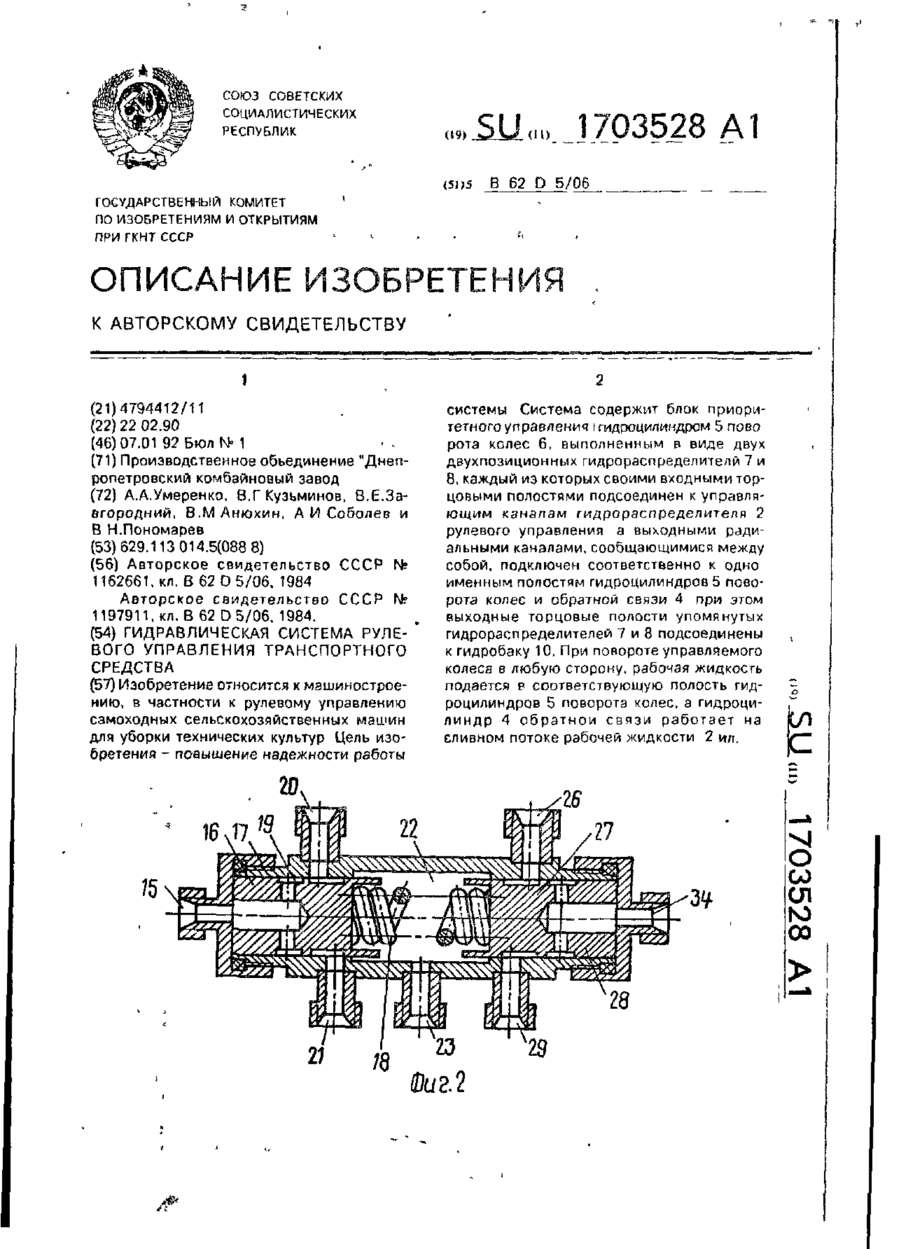
Гидравлическая система рулевого управления транспортного средства, содержащая гидрораспределитель рулевого управления, кинематически связанный с рулевым колесом и гидроцилиндром обратной связи и гидравлически соединенный с насосом, гидробаком, исполнительным гидроцилиндром, гидравлически соединенным с гидроцидиндром обратной связи, отличающаяся тем, что,с целью повышения надежности работы системы, она снабжена двумя двухпозиционными...
Попередній патент: Спосіб обробки води
Наступний патент: Комбайн вузькозахватний
Випадковий патент: Спосіб визначення твердості деревини