Система керування технологічним об`єктом
Номер патенту: 51692
Опубліковано: 26.07.2010
Автори: Бабічева Ольга Федорівна, Храмцов Анатолій Дмитрович, Лукашова Наталя Павлівна, Єсаулов Сергій Михайлович, Браславець Оксана Сергіївна

Формула / Реферат
Система керування технологічним об'єктом, що містить послідовно з'єднані вимірник розузгодження, перший регулятор, суматор, об'єкт керування, вихід якого підключений до першого входу вимірника розузгодження, до другого входу якого підключено задатчик, до виходу вимірника розузгодження підключені також послідовно з'єднані перший блок порівняння і другий регулятор, вихід якого з'єднаний з другим входом суматора, до виходу якого підключені також послідовно з'єднані модель чистого запізнювання об'єкта керування, другий блок порівняння, модель об'єкта без запізнювання, вихід якої підключений до другого входу першого блока порівняння, а до другого входу другого блока порівняння підключений вихід першого регулятора, яка відрізняється тим, що до неї додатково введено послідовно з'єднані блок контролю керуючої величини, блок коректування часу запізнювання, вихід якого підключений до другого входу моделі чистого запізнювання, а вхід блока контролю керуючої величини з'єднаний з другим виходом об'єкта керування.
Текст
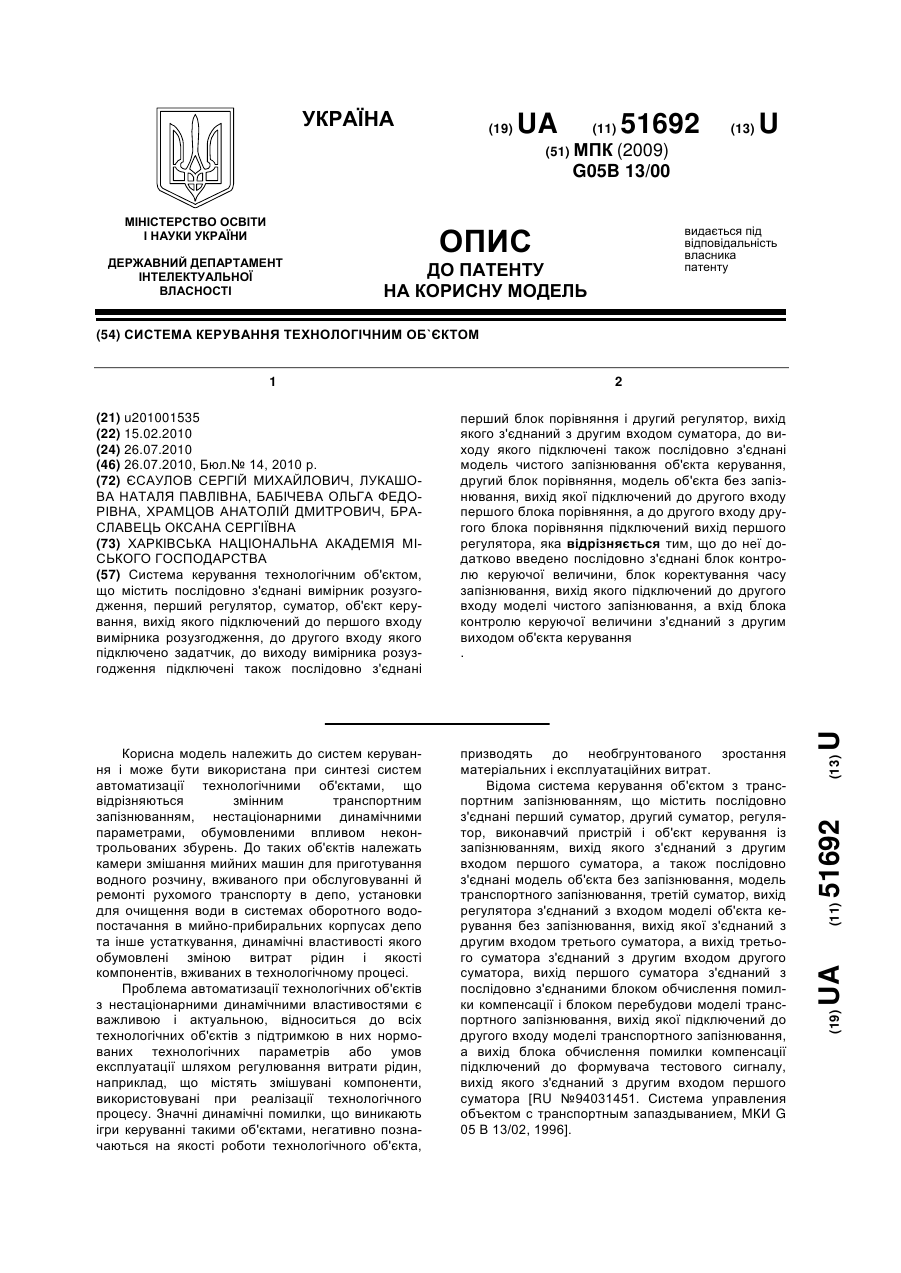
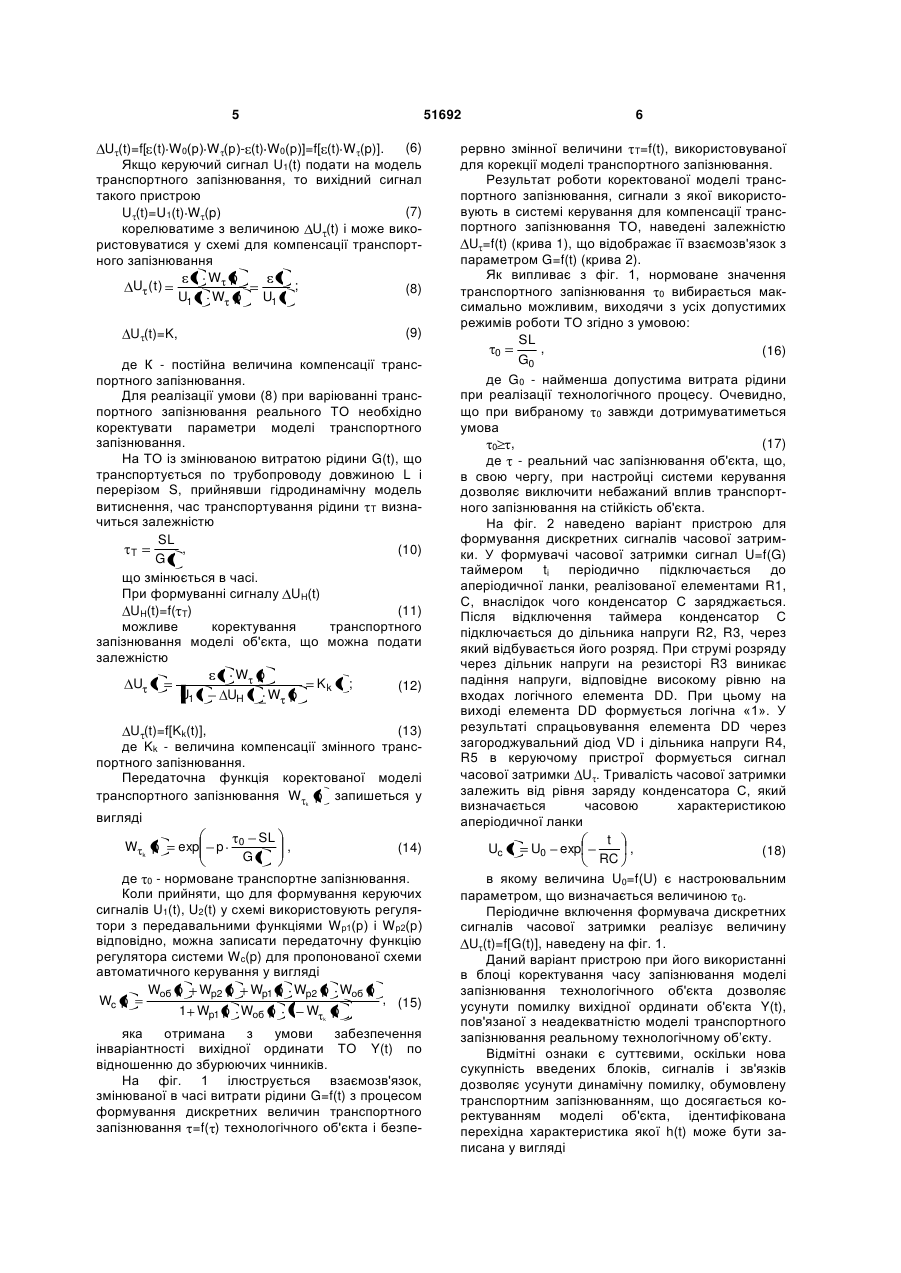
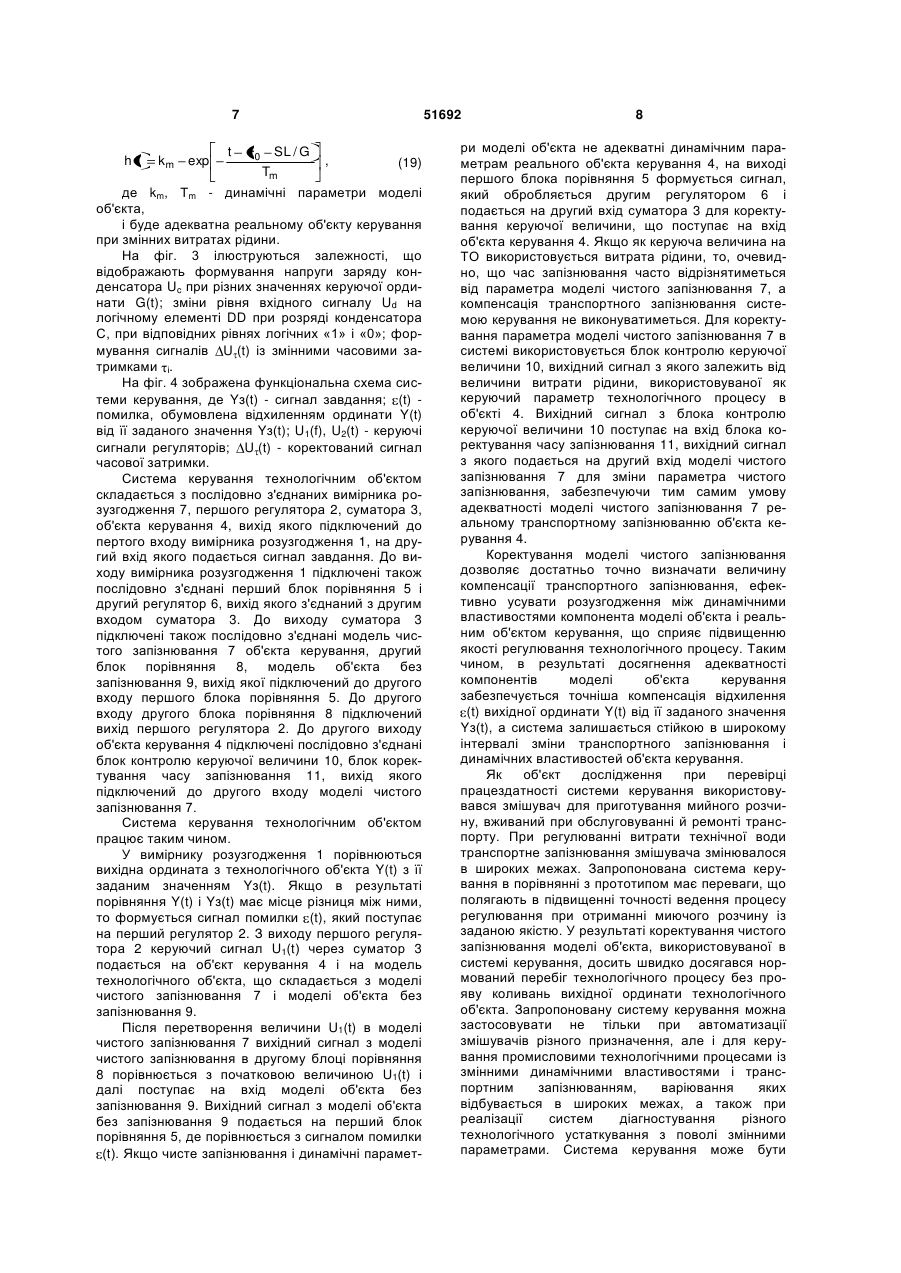
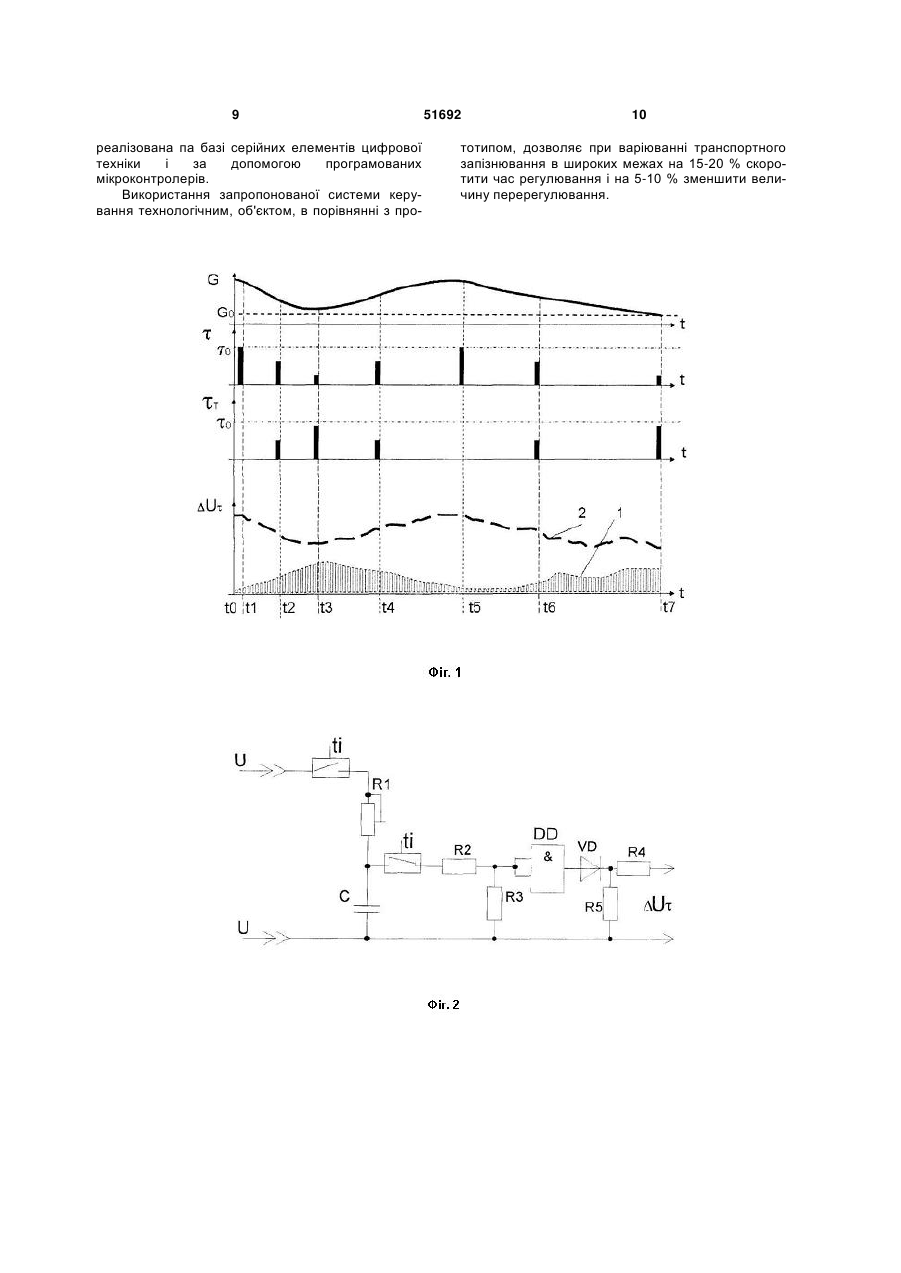
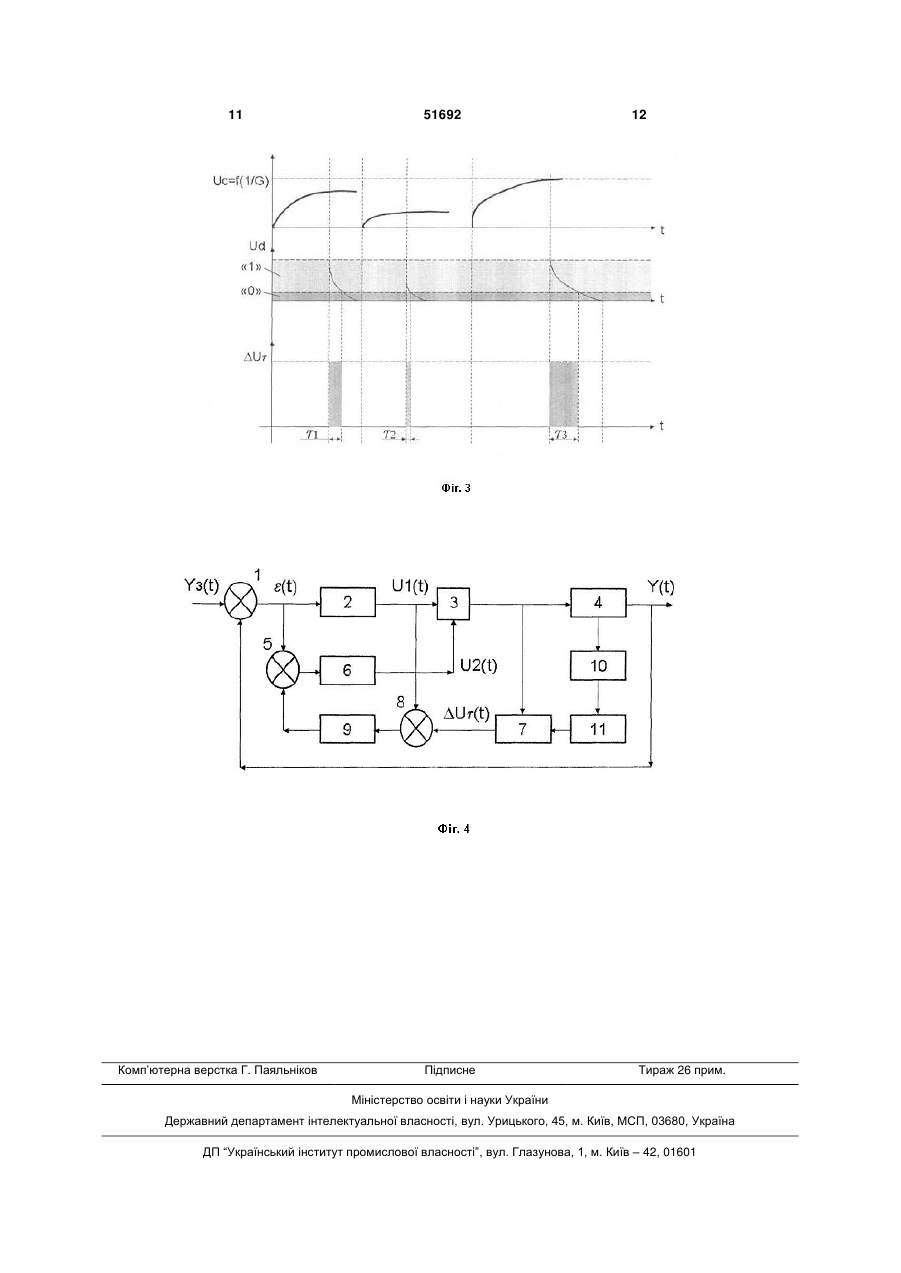
Система керування технологічним об'єктом, що містить послідовно з'єднані вимірник розузгодження, перший регулятор, суматор, об'єкт керування, вихід якого підключений до першого входу вимірника розузгодження, до другого входу якого підключено задатчик, до виходу вимірника розузгодження підключені також послідовно з'єднані 3 Недоліком даної системи є те, що вона не враховує зміни динамічних властивостей об'єкта і в певних умовах не повністю компенсує транспортне запізнювання, у зв'язку з чим регульована величина характеризується значною динамічною помилкою, а за певних умов система стає нестійкою. Відома система керування, що містить послідовно з'єднані перший суматор, вимірник розузгодження, регулятор, виконавчий механізм і об'єкт керування, а також послідовно з'єднані модель об'єкта керування без запізнювання, модель чистого запізнювання, блок ділення, другий суматор, вихід якого з'єднаний з входом першого суматора, а другий вхід - з виходом моделі об'єкта керування без запізнювання, вихід виконавчого механізму з'єднаний з входом моделі об'єкта керування без запізнювання, а вихід об'єкта керування підключений до другого входу блока ділення [SU № 1112342. Система управления для объекта с запаздыванием, МКИ G 05 В 11/01, 1984]. До недоліків такої системи можна віднести те, що при значних змінах динамічних властивостей об'єкта і транспортного запізнювання модель об'єкта керування стає неадекватною, у зв'язку з чим якість процесу регулювання супроводжується істотним зростанням динамічної помилки. Найбільш близькою за технічною суттю до пропонованої системи є система керування технологічним об'єктом, що містить послідовно з'єднані вимірник розузгодження, перший регулятор, суматор, об'єкт керування, вихід якого підключений до першого входу вимірника розузгодження, до другого входу якого підключено задатчик, до виходу вимірника розузгодження підключені також послідовно з'єднані перший блок порівняння і другий регулятор, вихід якого з'єднаний з другим входом суматора, до виходу якого підключені також послідовно з'єднані модель чистого запізнювання об'єкта керування, другий блок порівняння, модель об'єкта без запізнювання, вихід якої підключений до другого входу першого блока порівняння, а до другого входу другого блока порівняння підключений вихід першого регулятора [SU № 1674060. Система управления, МКИ G 05 В 13/00, 1991]. До недоліків такої системи можна віднести те, ідо система повністю компенсує запізнювання тільки за умови відповідності часу транспортного запізнювання реального об'єкта керування нормованому чистому запізнюванню, формованого моделлю об'єкта. При варіюванні транспортного запізнювання об'єкта система керування функціонує з істотною динамічною помилкою і за певних умов стає нестійкою. В основу корисної моделі поставлено завдання удосконалення системи керування технологічним об'єктом, в якій за рахунок введення нових конструктивних елементів враховуватимуться динамічні властивості об'єкта, що змінюються, і компенсуватиметься змінне транспортне запізнювання, що забезпечить допустиму динамічну помилку системи керування і її стійкість при варіюванні параметрів об'єкта в широких межах і дозволить на 15-20 % скоротити час регулю 51692 4 вання та на 5-10 % зменшити величину перерегулювання, підвищити точність ведення процесу регулювання при отриманні миючого розчину із заданою якістю. Поставлене завдання досягається тим, що в систему керування технологічним об'єктом, що містить послідовно з'єднані вимірник розузгодження, перший регулятор, суматор, об'єкт керування, вихід якого підключений до першого входу вимірника розузгодження, до другого входу якого підключено задатчик, до виходу вимірника розузгодження підключені також послідовно з'єднані перший блок порівняння і другий регулятор, вихід якого з'єднаний з другим входом суматора, до виходу якого підключені також послідовно з'єднані модель чистого запізнювання об'єкта керування, другий блок порівняння, модель об'єкта без запізнювання, вихід якої підключений до другого входу першого блока порівняння, а до другого входу другого блока порівняння підключений вихід першого регулятора, згідно з корисною моделлю, додатково введено послідовно з'єднані блок контролю керуючої величини, блок коректування часу запізнювання, вихід якого підключений до другого входу моделі чистого запізнювання, а вхід блока контролю керуючої величини з'єднаний з другим виходом об'єкта керування. Система забезпечує керування технологічним об'єктоміз змінюваними неконтрольованими збурюючими чинниками і транспортним запізнюванням . Динамічні властивості технологічного об'єкта (ТО) описуються передаточною функцією (1) Woб(p)=W0(p)W (p), де W0(p) - компонента, що відображає інерційні властивості ТО; W (p)=exp(-р ) - транспортне запізнювання ТО. Для досягнення умови інваріантності вихідної ординати Y(t) по відношенню до збурюючих чинників об'єкт оснащений засобами контролю величини Y(t), яку у вимірнику розузгодження порівнюють із заданим її значенням. Величина (t), залежна від різниці вихідної ординати Y(t) і її заданого значення Yз(t), визначається у вигляді (2) (t)=Y(t)-Yз(t). Використовуючи сигнал помилки (t), в системі можна формувати керуючий сигнал (3) U1(t)= (t) Wоб(р) для дії на реальний ТО з транспортним запізнюванням з метою усунення помилки, що виникла. Якщо сигнал помилки (t) аналогічним чином використовувати для формування керуючої величини, що подається на модель об'єкта без транспортного запізнювання, то на виході такої схеми буде отриманий сигнал у вигляді (4) U2(t)= (t) W0(p). Обчислюючи різницю отриманих сигналів U1(t) і U2(t), можна одержати величину U (t), що характеризує вплив транспортного запізнювання на формування керуючої дії: (5) U (t)=U1(t)-U2(t); 5 51692 (6) U (t)=f[ (t) W0(р) W (р)- (t) W0(р)]=f[ (t) W (p)]. Якщо керуючий сигнал U1(t) подати на модель транспортного запізнювання, то вихідний сигнал такого пристрою (7) U (t)=U1(t) W (p) корелюватиме з величиною U (t) і може використовуватися у схемі для компенсації транспортного запізнювання t W p t ; U (t) (8) U1 t W p U1 t (9) U (t)=K, де К - постійна величина компенсації транспортного запізнювання. Для реалізації умови (8) при варіюванні транспортного запізнювання реального ТО необхідно коректувати параметри моделі транспортного запізнювання. На ТО із змінюваною витратою рідини G(t), що транспортується по трубопроводу довжиною L і перерізом S, прийнявши гідродинамічну модель витиснення, час транспортування рідини T визначиться залежністю SL , (10) T Gt що змінюється в часі. При формуванні сигналу UH(t) (11) UH(t)=f( T) можливе коректування транспортного запізнювання моделі об'єкта, що можна подати залежністю t W p U t Kk t ; (12) U1 t UH t W p (13) U (t)=f[Kk(t)], де Kk - величина компенсації змінного транспортного запізнювання. Передаточна функція коректованої моделі транспортного запізнювання W k p запишеться у вигляді W k p exp p SL , Gt 0 (14) де 0 - нормоване транспортне запізнювання. Коли прийняти, що для формування керуючих сигналів U1(t), U2(t) у схемі використовують регулятори з передавальними функціями Wр1(р) і Wр2(р) відповідно, можна записати передаточну функцію регулятора системи Wc(p) для пропонованої схеми автоматичного керування у вигляді Wоб р Wp2 p Wp1 p Wp2 p Wоб р , (15) Wc p 1 Wp1 p Wоб р 1 W k p яка отримана з умови забезпечення інваріантності вихідної ординати ТО Y(t) по відношенню до збурюючих чинників. На фіг. 1 ілюструється взаємозв'язок, змінюваної в часі витрати рідини G=f(t) з процесом формування дискретних величин транспортного запізнювання =f( ) технологічного об'єкта і безпе 6 рервно змінної величини Т=f(t), використовуваної для корекції моделі транспортного запізнювання. Результат роботи коректованої моделі транспортного запізнювання, сигнали з якої використовують в системі керування для компенсації транспортного запізнювання ТО, наведені залежністю U =f(t) (крива 1), що відображає її взаємозв'язок з параметром G=f(t) (крива 2). Як випливає з фiг. 1, нормоване значення транспортного запізнювання 0 вибирається максимально можливим, виходячи з усіх допустимих режимів роботи ТО згідно з умовою: SL , (16) 0 G0 де G0 - найменша допустима витрата рідини при реалізації технологічного процесу. Очевидно, що при вибраному 0 завжди дотримуватиметься умова (17) 0 , де - реальний час запізнювання об'єкта, що, в свою чергу, при настройці системи керування дозволяє виключити небажаний вплив транспортного запізнювання на стійкість об'єкта. На фiг. 2 наведено варіант пристрою для формування дискретних сигналів часової затримки. У формувачі часової затримки сигнал U=f(G) таймером ti періодично підключається до аперіодичної ланки, реалізованої елементами R1, С, внаслідок чого конденсатор С заряджається. Після відключення таймера конденсатор С підключається до дільника напруги R2, R3, через який відбувається його розряд. При струмі розряду через дільник напруги на резисторі R3 виникає падіння напруги, відповідне високому рівню на входах логічного елемента DD. При цьому на виході елемента DD формується логічна «1». У результаті спрацьовування елемента DD через загороджувальний діод VD і дільника напруги R4, R5 в керуючому пристрої формується сигнал часової затримки U . Тривалістьчасової затримки залежить від рівня заряду конденсатора С, який визначається часовою характеристикою аперіодичної ланки t Uc t U0 exp , (18) RC в якому величина U0=f(U) є настроювальним параметром, що визначається величиною 0. Періодичне включення формувача дискретних сигналів часової затримки реалізує величину U (t)=f[G(t)], наведену на фіг. 1. Даний варіант пристрою при його використанні в блоці коректування часу запізнювання моделі запізнювання технологічного об'єкта дозволяє усунути помилку вихідної ординати об'єкта Y(t), пов'язаної з неадекватністю моделі транспортного запізнювання реальному технологічному об’єкту. Відмітні ознаки є суттєвими, оскільки нова сукупність введених блоків, сигналів і зв'язків дозволяє усунути динамічну помилку, обумовлену транспортним запізнюванням, що досягається коректуванням моделі об'єкта, ідентифікована перехідна характеристика якої h(t) може бути записана у вигляді 7 ht km exp t 51692 0 SL / G Tm , (19) де km, Тm - динамічні параметри моделі об'єкта, і буде адекватна реальному об'єкту керування при змінних витратах рідини. На фiг. 3 ілюструються залежності, що відображають формування напруги заряду конденсатора Uc при різних значеннях керуючої ординати G(t); зміни рівня вхідного сигналу Ud на логічному елементі DD при розряді конденсатора С, при відповідних рівнях логічних «1» і «0»; формування сигналів U (t) із змінними часовими затримками і. На фiг. 4 зображена функціональна схема системи керування, де Yз(t) - сигнал завдання; (t) помилка, обумовлена відхиленням ординати Y(t) від її заданого значення Yз(t); U1(f), U2(t) - керуючі сигнали регуляторів; U (t) - коректований сигнал часової затримки. Система керування технологічним об'єктом складається з послідовно з'єднаних вимірника розузгодження 7, першого регулятора 2, суматора 3, об'єкта керування 4, вихід якого підключений до пертого входу вимірника розузгодження 1, на другий вхід якого подається сигнал завдання. До виходу вимірника розузгодження 1 підключені також послідовно з'єднані перший блок порівняння 5 і другий регулятор 6, вихід якого з'єднаний з другим входом суматора 3. До виходу суматора 3 підключені також послідовно з'єднані модель чистого запізнювання 7 об'єкта керування, другий блок порівняння 8, модель об'єкта без запізнювання 9, вихід якої підключений до другого входу першого блока порівняння 5. До другого входу другого блока порівняння 8 підключений вихід першого регулятора 2. До другого виходу об'єкта керування 4 підключені послідовно з'єднані блок контролю керуючої величини 10, блок коректування часу запізнювання 11, вихід якого підключений до другого входу моделі чистого запізнювання 7. Система керування технологічним об'єктом працює таким чином. У вимірнику розузгодження 1 порівнюються вихідна ордината з технологічного об'єкта Y(t) з її заданим значенням Yз(t). Якщо в результаті порівняння Y(t) і Yз(t) має місце різниця між ними, то формується сигнал помилки (t), який поступає на перший регулятор 2. З виходу першого регулятора 2 керуючий сигнал U1(t) через суматор 3 подається на об'єкт керування 4 і на модель технологічного об'єкта, що складається з моделі чистого запізнювання 7 і моделі об'єкта без запізнювання 9. Після перетворення величини U1(t) в моделі чистого запізнювання 7 вихідний сигнал з моделі чистого запізнювання в другому блоці порівняння 8 порівнюється з початковою величиною U1(t) і далі поступає на вхід моделі об'єкта без запізнювання 9. Вихідний сигнал з моделі об'єкта без запізнювання 9 подається на перший блок порівняння 5, де порівнюється з сигналом помилки (t). Якщо чисте запізнювання і динамічні парамет 8 ри моделі об'єкта не адекватні динамічним параметрам реального об'єкта керування 4, на виході першого блока порівняння 5 формується сигнал, який обробляється другим регулятором 6 і подається на другий вхід суматора 3 для коректування керуючої величини, що поступає на вхід об'єкта керування 4. Якщо як керуюча величина на ТО використовується витрата рідини, то, очевидно, що час запізнювання часто відрізнятиметься від параметра моделі чистого запізнювання 7, а компенсація транспортного запізнювання системою керування не виконуватиметься. Для коректування параметра моделі чистого запізнювання 7 в системі використовується блок контролю керуючої величини 10, вихідний сигнал з якого залежить від величини витрати рідини, використовуваної як керуючий параметр технологічного процесу в об'єкті 4. Вихідний сигнал з блока контролю керуючої величини 10 поступає на вхід блока коректування часу запізнювання 11, вихідний сигнал з якого подається на другий вхід моделі чистого запізнювання 7 для зміни параметра чистого запізнювання, забезпечуючи тим самим умову адекватності моделі чистого запізнювання 7 реальному транспортному запізнюванню об'єкта керування 4. Коректування моделі чистого запізнювання дозволяє достатньо точно визначати величину компенсації транспортного запізнювання, ефективно усувати розузгодження між динамічними властивостями компонента моделі об'єкта і реальним об'єктом керування, що сприяє підвищенню якості регулювання технологічного процесу. Таким чином, в результаті досягнення адекватності компонентів моделі об'єкта керування забезпечується точніша компенсація відхилення (t) вихідної ординати Y(t) від її заданого значення Yз(t), а система залишається стійкою в широкому інтервалі зміни транспортного запізнювання і динамічних властивостей об'єкта керування. Як об'єкт дослідження при перевірці працездатності системи керування використовувався змішувач для приготування мийного розчину, вживаний при обслуговуванні й ремонті транспорту. При регулюванні витрати технічної води транспортне запізнювання змішувача змінювалося в широких межах. Запропонована система керування в порівнянні з прототипом має переваги, що полягають в підвищенні точності ведення процесу регулювання при отриманні миючого розчину із заданою якістю. У результаті коректування чистого запізнювання моделі об'єкта, використовуваної в системі керування, досить швидко досягався нормований перебіг технологічного процесу без прояву коливань вихідної ординати технологічного об'єкта. Запропоновану систему керування можна застосовувати не тільки при автоматизації змішувачів різного призначення, але і для керування промисловими технологічними процесами із змінними динамічними властивостями і транспортним запізнюванням, варіювання яких відбувається в широких межах, а також при реалізації систем діагностування різного технологічного устаткування з поволі змінними параметрами. Система керування може бути 9 реалізована па базі серійних елементів цифрової техніки і за допомогою програмованих мікроконтролерів. Використання запропонованої системи керування технологічним, об'єктом, в порівнянні з про 51692 10 тотипом, дозволяє при варіюванні транспортного запізнювання в широких межах на 15-20 % скоротити час регулювання і на 5-10 % зменшити величину перерегулювання. 11 Комп’ютерна верстка Г. Паяльніков 51692 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюProduction facility control system
Автори англійськоюYesaulov Serhii Mykhaiolovych, Lukashova Natalia Pavlivna, Babicheva Olha Fedorivna, Khramtsov Anatolii Dmytrovych, Braslavets Oksana Serhiivna
Назва патенту російськоюСистема управления технологическим объектом
Автори російськоюЕсаулов Сергей Михайлович, Лукашова Наталья Павловна, Бабичева Ольга Федоровна, Храмцов Анатолий Дмитриевич, Браславец Оксана Сергеевна
МПК / Мітки
МПК: G05B 13/00
Мітки: об'єктом, технологічним, керування, система
Код посилання
<a href="https://ua.patents.su/6-51692-sistema-keruvannya-tekhnologichnim-obehktom.html" target="_blank" rel="follow" title="База патентів України">Система керування технологічним об`єктом</a>
Система керування технологічним об’єктом
Номер патенту: 41820
Опубліковано: 10.06.2009
Автори: Савостьян Олексій Сергійович, Єсаулов Сергій Михайлович, Шавкун В'ячеслав Михайлович, Бабічева Ольга Федорівна, Бабаков Сергій В'ячеславович
МПК: G05B 13/02
Мітки: технологічним, керування, об'єктом, система
Формула / Реферат:
Система керування технологічним об'єктом, що містить послідовно з'єднані формувач тестового сигналу, перший суматор, другий суматор, регулятор, виконавчий пристрій і об'єкт керування із запізнюванням, вихід якого з'єднаний з другим входом першого суматора, а також послідовно з'єднані модель об'єкта керування без запізнювання, модель транспортного запізнювання і третій суматор, вихід якого з'єднаний з другим входом другого суматора, вхід...
Система керування об’єктом із запізнюванням
Номер патенту: 34774
Опубліковано: 15.03.2001
Автори: Жиляков Віктор Іванович, Ткачов Роман Юрійович
МПК: G05B 13/02
Мітки: система, керування, запізнюванням, об'єктом
Формула / Реферат:
Система керування об'єктом із запізнюванням, що містить послідовно сполучені: перший елемент порівняння, перший регулятор, об'єкт із запізнюванням, другий елемент порівняння, а також залучену до виходу першого регулятора модель чистого запізнювання і залучену до входу другого елемента порівняння першу модель інерційної частини об'єкта, яка відрізняється тим, що вона додатково обладнана другою моделлю інерційної частини об'єкта, другим...
Система керування нестаціонарним нелінійним об’єктом
Номер патенту: 45234
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Тарасова Аліна Сергіївна, Дибська Ирина Юріївна
МПК: G05B 13/00
Мітки: нестаціонарним, нелінійним, об'єктом, система, керування
Формула / Реферат:
Система керування нестаціонарним нелінійним об'єктом, що містить два суматори, яка відрізняється тим, що в неї введені спостерігач стану по керуванню, вихід якого сполучений з першим входом третього суматора, другий вхід якого з'єднаний з виходом спостерігача стану вихідного параметра об'єкта керування, причому вихід третього суматора та вихід нестаціонарного нелінійного об'єкта сполучені з четвертим суматором, вихід якого через ітераційний...
Система для обміну даними між об’єктом керування та системою обробки даних
Номер патенту: 61852
Опубліковано: 17.11.2003
Автори: Бандурка Олександр Маркович, Шаповал Володимир Іванович, Угровецький Олег Петрович, Симов'ян Саркіс Ваграмович, Попов Олександр Анатолійович
МПК: H04M 11/04, G08B 25/00
Мітки: обміну, обробки, даними, об'єктом, системою, система, керування, даних
Формула / Реферат:
1. Система для обміну даними між об'єктом керування і системою обробки даних, що містить приймач вхідних сигналів, вхід якого сполучений з виходом об'єкта керування, а вихід - з центральним блоком керування, вихід якого сполучений по лінії зв'язку з передавачем, яка відрізняється тим, що центральний блок керування має другий вихід, підключений через приймач-передавач до другої лінії зв'язку, яка має середовище для передавання, інше ніж...
Спосіб керування технологічним процесом
Номер патенту: 44669
Опубліковано: 12.10.2009
Автори: Титюк Валерій Костянтинович, Гнатюк Юлія Ігорівна, Михайленко Олексій Юрійович, Аніськов Олександр Володимирович, Луценко Ігор Анатолійович
МПК: G05D 99/00
Мітки: керування, технологічним, процесом, спосіб
Формула / Реферат:
Спосіб керування технологічним процесом, що включає формування сигналу керування, визначення сигналів облікових параметрів вхідних і вихідних продуктів, перетворення їх в еквівалентні вхідні і вихідні сигнали, підсумовування еквівалентних вхідних сигналів, підсумовування еквівалентних вихідних сигналів, визначення показника результативності в функції підсумованих вхідних і вихідних еквівалентних сигналів, порівняння визначеного показника...
Попередній патент: Гібридний контактор
Наступний патент: Несуча каретка пристрою консольного типу для перекривання проїзду або проходу
Випадковий патент: Спосіб зниження концентрації бактерійних ендотоксинів у воді для ін'єкцій та фізіологічних розчинах