Зерномет самопересувний
Формула / Реферат
1. Зерномет самопересувний, що містить механізм пересування, тример, шарнірно закріплений на рамі із можливістю повертатися на 90° в обидві сторони відносно повздовжньої осі рами, викидний жолоб із відкидним носком, що регулюється, і завантажувальний транспортер із живильниками, який відрізняється тим, що привід механізму пересування здійснено за допомогою спарених передніх коліс, поворотний механізм зерномета, завантажувальний транспортер і кожен із живильників мають привід від окремих мотор-редукторів, керування рухом та поворотом зерномета здійснюєтьсь за допомогою виносного пульта дистанційного керування, відкидний носок складається з двох шарнірно з'єднаних частин.
2. Зерномет самопересувний за п. 1, який відрізняється тим, що ведучий барабан тримера встановлений безпосередньо на валу електродвигуна.
Текст
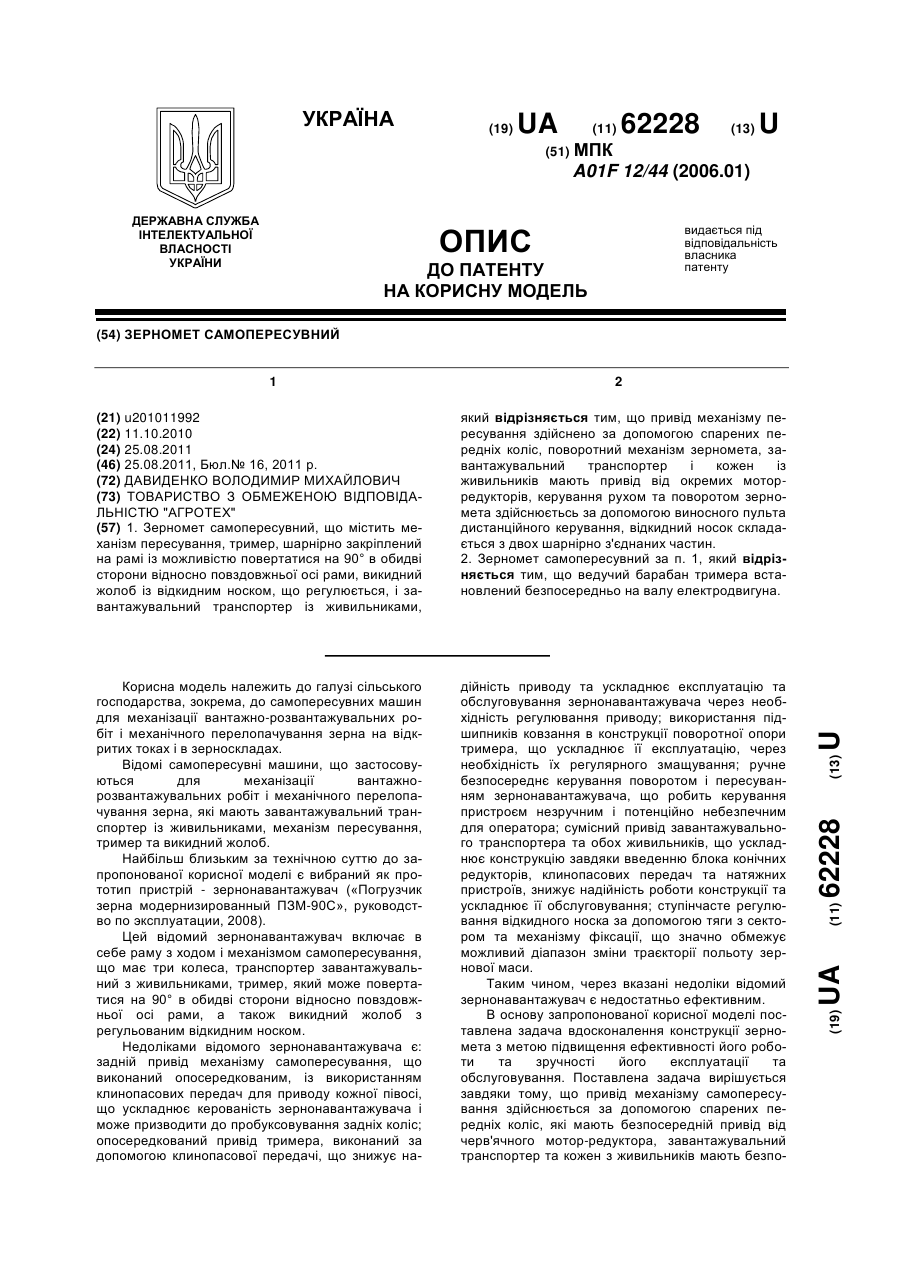
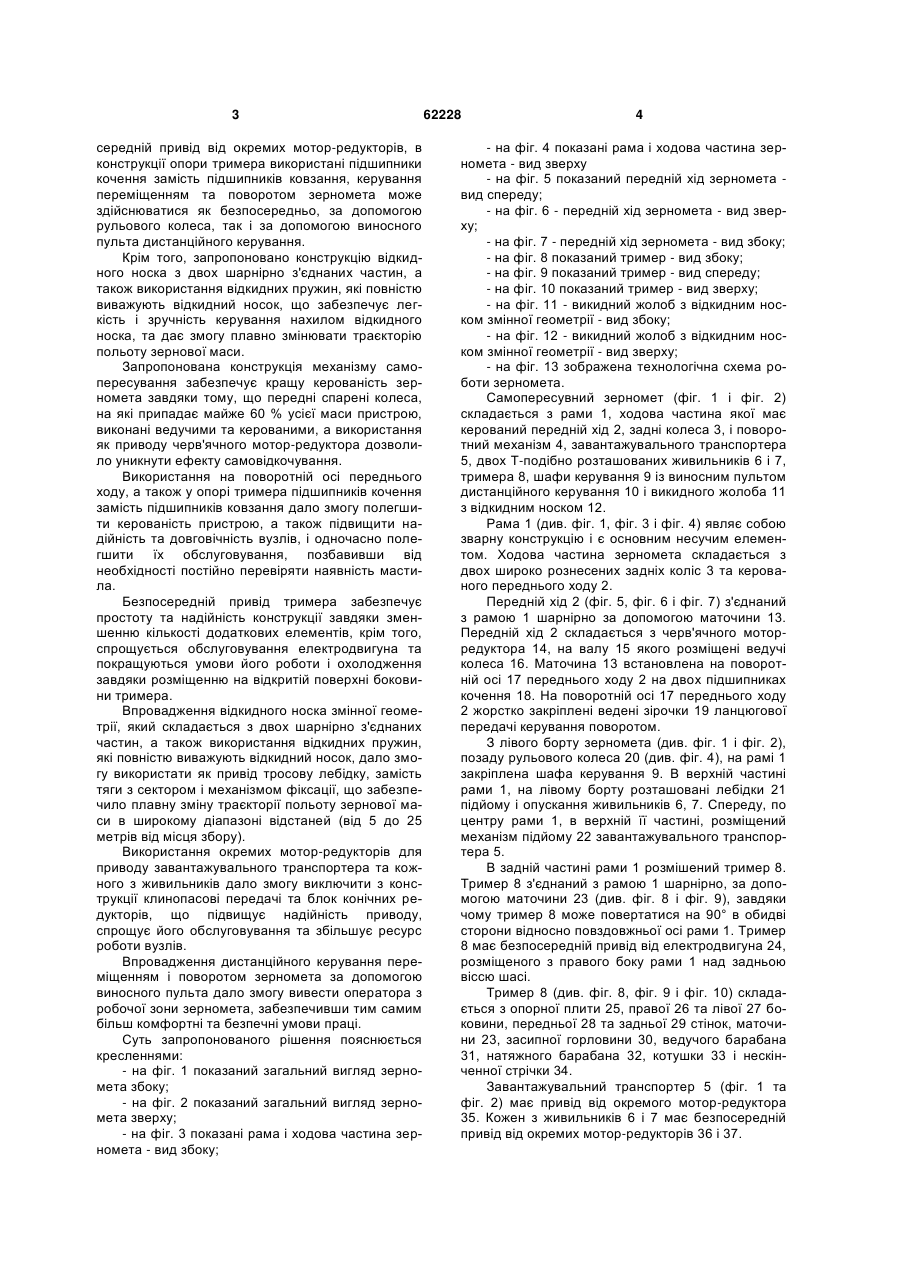
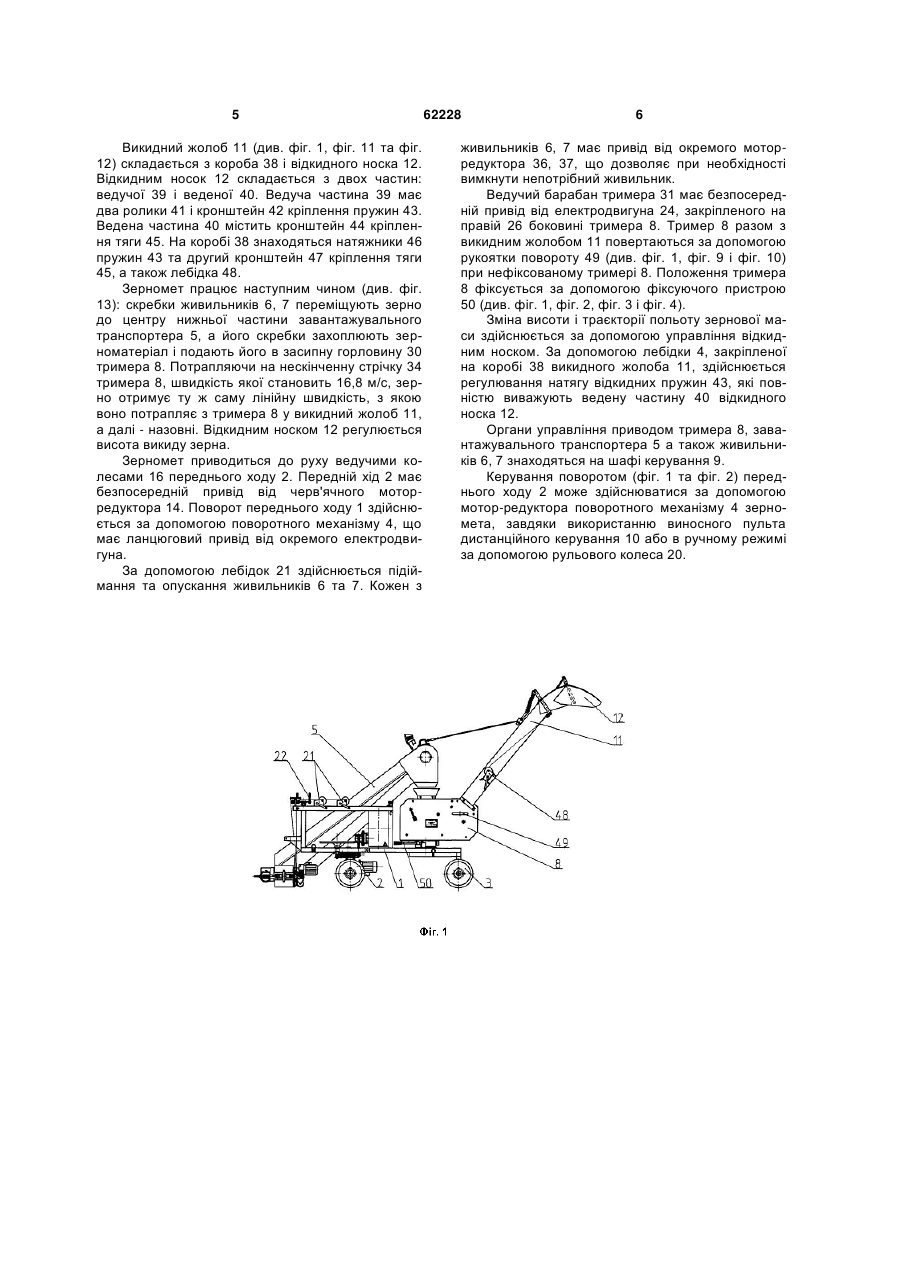
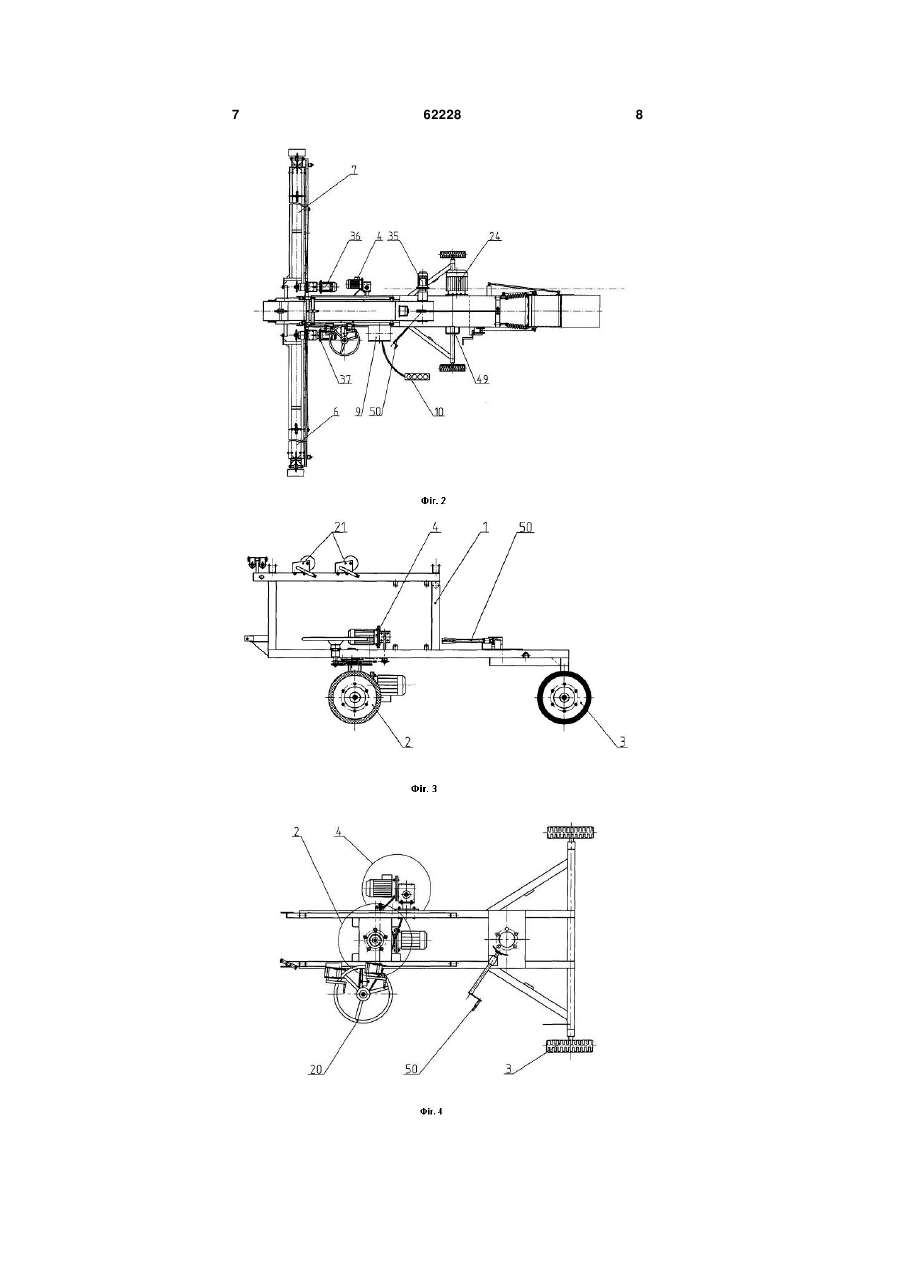
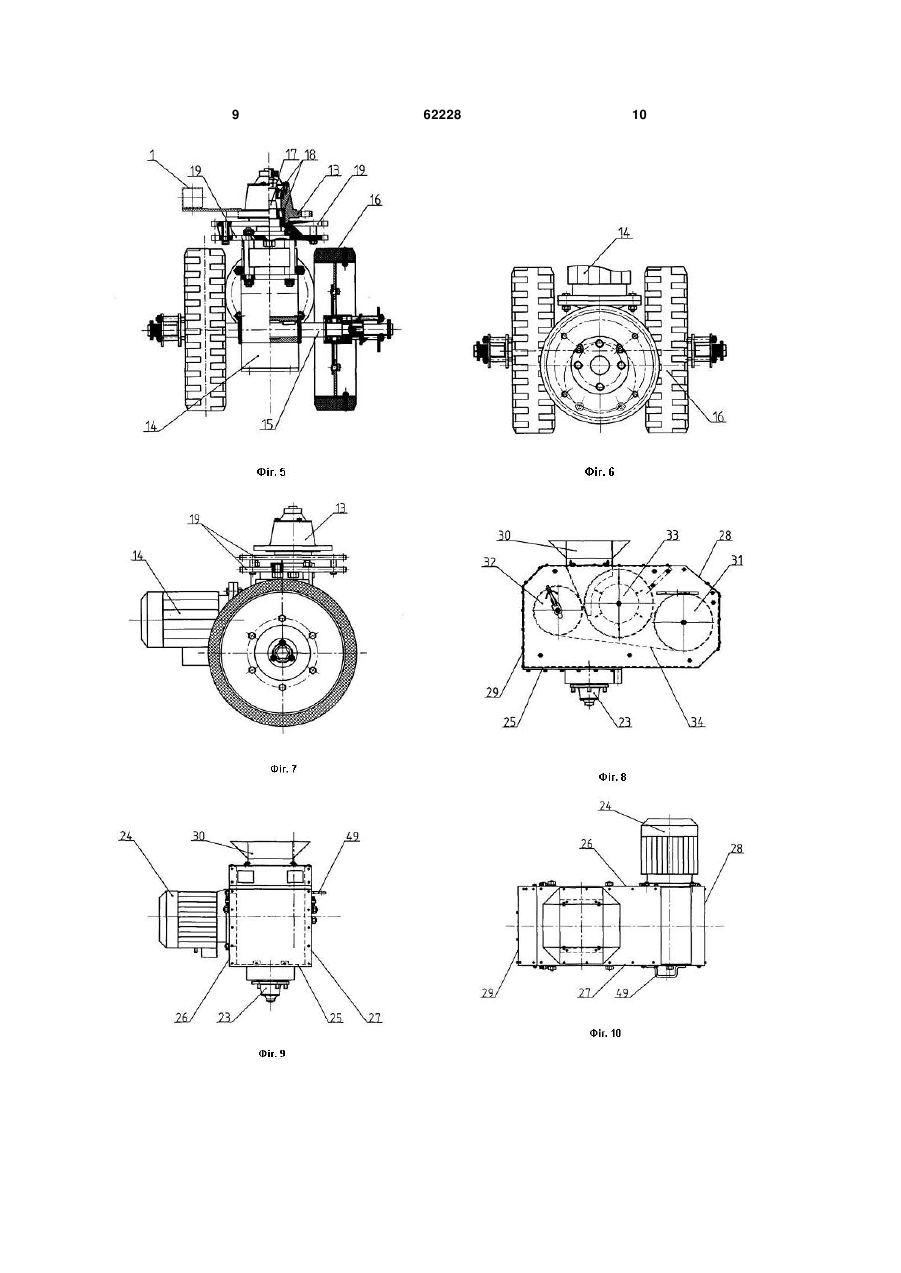
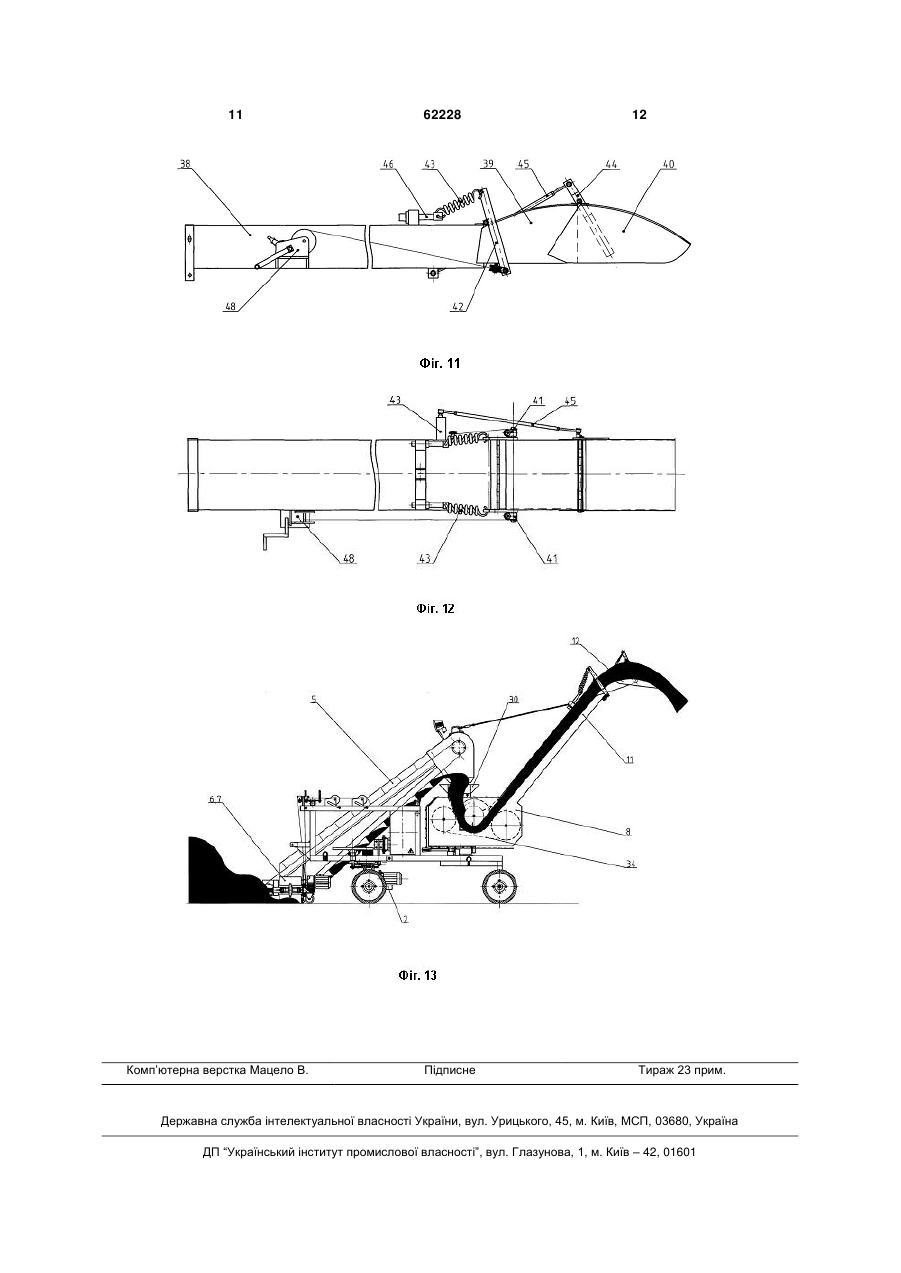
1. Зерномет самопересувний, що містить механізм пересування, тример, шарнірно закріплений на рамі із можливістю повертатися на 90° в обидві сторони відносно повздовжньої осі рами, викидний жолоб із відкидним носком, що регулюється, і завантажувальний транспортер із живильниками, 3 середній привід від окремих мотор-редукторів, в конструкції опори тримера використані підшипники кочення замість підшипників ковзання, керування переміщенням та поворотом зерномета може здійснюватися як безпосередньо, за допомогою рульового колеса, так і за допомогою виносного пульта дистанційного керування. Крім того, запропоновано конструкцію відкидного носка з двох шарнірно з'єднаних частин, а також використання відкидних пружин, які повністю виважують відкидний носок, що забезпечує легкість і зручність керування нахилом відкидного носка, та дає змогу плавно змінювати траєкторію польоту зернової маси. Запропонована конструкція механізму самопересування забезпечує кращу керованість зерномета завдяки тому, що передні спарені колеса, на які припадає майже 60 % усієї маси пристрою, виконані ведучими та керованими, а використання як приводу черв'ячного мотор-редуктора дозволило уникнути ефекту самовідкочування. Використання на поворотній осі переднього ходу, а також у опорі тримера підшипників кочення замість підшипників ковзання дало змогу полегшити керованість пристрою, а також підвищити надійність та довговічність вузлів, і одночасно полегшити їх обслуговування, позбавивши від необхідності постійно перевіряти наявність мастила. Безпосередній привід тримера забезпечує простоту та надійність конструкції завдяки зменшенню кількості додаткових елементів, крім того, спрощується обслуговування електродвигуна та покращуються умови його роботи і охолодження завдяки розміщенню на відкритій поверхні боковини тримера. Впровадження відкидного носка змінної геометрії, який складається з двох шарнірно з'єднаних частин, а також використання відкидних пружин, які повністю виважують відкидний носок, дало змогу використати як привід тросову лебідку, замість тяги з сектором і механізмом фіксації, що забезпечило плавну зміну траєкторії польоту зернової маси в широкому діапазоні відстаней (від 5 до 25 метрів від місця збору). Використання окремих мотор-редукторів для приводу завантажувального транспортера та кожного з живильників дало змогу виключити з конструкції клинопасові передачі та блок конічних редукторів, що підвищує надійність приводу, спрощує його обслуговування та збільшує ресурс роботи вузлів. Впровадження дистанційного керування переміщенням і поворотом зерномета за допомогою виносного пульта дало змогу вивести оператора з робочої зони зерномета, забезпечивши тим самим більш комфортні та безпечні умови праці. Суть запропонованого рішення пояснюється кресленнями: - на фіг. 1 показаний загальний вигляд зерномета збоку; - на фіг. 2 показаний загальний вигляд зерномета зверху; - на фіг. 3 показані рама і ходова частина зерномета - вид збоку; 62228 4 - на фіг. 4 показані рама і ходова частина зерномета - вид зверху - на фіг. 5 показаний передній хід зерномета вид спереду; - на фіг. 6 - передній хід зерномета - вид зверху; - на фіг. 7 - передній хід зерномета - вид збоку; - на фіг. 8 показаний тример - вид збоку; - на фіг. 9 показаний тример - вид спереду; - на фіг. 10 показаний тример - вид зверху; - на фіг. 11 - викидний жолоб з відкидним носком змінної геометрії - вид збоку; - на фіг. 12 - викидний жолоб з відкидним носком змінної геометрії - вид зверху; - на фіг. 13 зображена технологічна схема роботи зерномета. Самопересувний зерномет (фіг. 1 і фіг. 2) складається з рами 1, ходова частина якої має керований передній хід 2, задні колеса 3, і поворотний механізм 4, завантажувального транспортера 5, двох Т-подібно розташованих живильників 6 і 7, тримера 8, шафи керування 9 із виносним пультом дистанційного керування 10 і викидного жолоба 11 з відкидним носком 12. Рама 1 (див. фіг. 1, фіг. 3 і фіг. 4) являє собою зварну конструкцію і є основним несучим елементом. Ходова частина зерномета складається з двох широко рознесених задніх коліс 3 та керованого переднього ходу 2. Передній хід 2 (фіг. 5, фіг. 6 і фіг. 7) з'єднаний з рамою 1 шарнірно за допомогою маточини 13. Передній хід 2 складається з черв'ячного моторредуктора 14, на валу 15 якого розміщені ведучі колеса 16. Маточина 13 встановлена на поворотній осі 17 переднього ходу 2 на двох підшипниках кочення 18. На поворотній осі 17 переднього ходу 2 жорстко закріплені ведені зірочки 19 ланцюгової передачі керування поворотом. З лівого борту зерномета (див. фіг. 1 і фіг. 2), позаду рульового колеса 20 (див. фіг. 4), на рамі 1 закріплена шафа керування 9. В верхній частині рами 1, на лівому борту розташовані лебідки 21 підйому і опускання живильників 6, 7. Спереду, по центру рами 1, в верхній її частині, розміщений механізм підйому 22 завантажувального транспортера 5. В задній частині рами 1 розмішений тример 8. Тример 8 з'єднаний з рамою 1 шарнірно, за допомогою маточини 23 (див. фіг. 8 і фіг. 9), завдяки чому тример 8 може повертатися на 90° в обидві сторони відносно повздовжньої осі рами 1. Тример 8 має безпосередній привід від електродвигуна 24, розміщеного з правого боку рами 1 над задньою віссю шасі. Тример 8 (див. фіг. 8, фіг. 9 і фіг. 10) складається з опорної плити 25, правої 26 та лівої 27 боковини, передньої 28 та задньої 29 стінок, маточини 23, засипної горловини 30, ведучого барабана 31, натяжного барабана 32, котушки 33 і нескінченної стрічки 34. Завантажувальний транспортер 5 (фіг. 1 та фіг. 2) має привід від окремого мотор-редуктора 35. Кожен з живильників 6 і 7 має безпосередній привід від окремих мотор-редукторів 36 і 37. 5 Викидний жолоб 11 (див. фіг. 1, фіг. 11 та фіг. 12) складається з короба 38 і відкидного носка 12. Відкидним носок 12 складається з двох частин: ведучої 39 і веденої 40. Ведуча частина 39 має два ролики 41 і кронштейн 42 кріплення пружин 43. Ведена частина 40 містить кронштейн 44 кріплення тяги 45. На коробі 38 знаходяться натяжники 46 пружин 43 та другий кронштейн 47 кріплення тяги 45, а також лебідка 48. Зерномет працює наступним чином (див. фіг. 13): скребки живильників 6, 7 переміщують зерно до центру нижньої частини завантажувального транспортера 5, а його скребки захоплюють зерноматеріал і подають його в засипну горловину 30 тримера 8. Потрапляючи на нескінченну стрічку 34 тримера 8, швидкість якої становить 16,8 м/с, зерно отримує ту ж саму лінійну швидкість, з якою воно потрапляє з тримера 8 у викидний жолоб 11, а далі - назовні. Відкидним носком 12 регулюється висота викиду зерна. Зерномет приводиться до руху ведучими колесами 16 переднього ходу 2. Передній хід 2 має безпосередній привід від черв'ячного моторредуктора 14. Поворот переднього ходу 1 здійснюється за допомогою поворотного механізму 4, що має ланцюговий привід від окремого електродвигуна. За допомогою лебідок 21 здійснюється підіймання та опускання живильників 6 та 7. Кожен з 62228 6 живильників 6, 7 має привід від окремого моторредуктора 36, 37, що дозволяє при необхідності вимкнути непотрібний живильник. Ведучий барабан тримера 31 має безпосередній привід від електродвигуна 24, закріпленого на правій 26 боковині тримера 8. Тример 8 разом з викидним жолобом 11 повертаються за допомогою рукоятки повороту 49 (див. фіг. 1, фіг. 9 і фіг. 10) при нефіксованому тримері 8. Положення тримера 8 фіксується за допомогою фіксуючого пристрою 50 (див. фіг. 1, фіг. 2, фіг. 3 і фіг. 4). Зміна висоти і траєкторії польоту зернової маси здійснюється за допомогою управління відкидним носком. За допомогою лебідки 4, закріпленої на коробі 38 викидного жолоба 11, здійснюється регулювання натягу відкидних пружин 43, які повністю виважують ведену частину 40 відкидного носка 12. Органи управління приводом тримера 8, завантажувального транспортера 5 а також живильників 6, 7 знаходяться на шафі керування 9. Керування поворотом (фіг. 1 та фіг. 2) переднього ходу 2 може здійснюватися за допомогою мотор-редуктора поворотного механізму 4 зерномета, завдяки використанню виносного пульта дистанційного керування 10 або в ручному режимі за допомогою рульового колеса 20. 7 62228 8 9 62228 10 11 Комп’ютерна верстка Мацело В. 62228 Підписне 12 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-propelled grain blower
Автори англійськоюDavydenko Volodymyr Mykhailovych
Назва патенту російськоюЗерномет самопередвижной
Автори російськоюДавыденко Владимир Михайлович
МПК / Мітки
МПК: A01F 12/44
Мітки: зерномет, самопересувний
Код посилання
<a href="https://ua.patents.su/6-62228-zernomet-samoperesuvnijj.html" target="_blank" rel="follow" title="База патентів України">Зерномет самопересувний</a>
Зернокидач самопересувний зм-60у
Номер патенту: 60795
Опубліковано: 25.06.2011
Автор: Мороз Сергій Антонович
МПК: B65G 31/00
Мітки: самопересувний, зернокидач, зм-60у
Формула / Реферат:
1. Зернокидач самопересувний, що містить механізм пересування, який включає встановлену на колесах раму з розміщеними на ній двошвидкісним редуктором і двигуном, а також завантажувальний транспортер з живильниками і редукторами, сполучений з електроприводом, розміщений на рамі тример з барабанами і котушкою і зв'язаний з тримером розвантажувальний транспортер, який відрізняється тим, що тример встановлений з можливістю вертикального...
Самопересувний ворохоочисник
Номер патенту: 69342
Опубліковано: 16.08.2004
Автори: Савенець Юрій Іванович, Тонюк Микола Миколайович, Антосєв Сергій Володимирович
МПК: A01F 12/44, B07B 1/28
Мітки: самопересувний, ворохоочисник
Формула / Реферат:
Самопересувний ворохоочисник, який містить раму з ходом і механізмом самопересування, навантажувальний транспортер із живильниками, розвантажувальний транспортер, вентилятор та пиловідокремлювач, який відрізняється тим, що він оснащений вібровідцентровим сепаратором для зерна з пневматичною відцентровою віялкою, який встановлений на раму з ходом.
Рульове керування з електроприводом

Номер патенту: 36755
Опубліковано: 10.11.2008
Автор: Броварець Олександр Олександрович
МПК: B62D 3/00
Мітки: рульове, електроприводом, керування
Формула / Реферат:
Рульове керування з електроприводом, що містить рульовий привід, виконаний у вигляді рульової трапеції та поперечної тяги з шарнірами на кінцях, кожний з яких зв'язаний з поворотним важелем, яке відрізняється тим, що рульовий привід виконаний у вигляді з'єднання вал-гайка, вал якого сполучений з електродвигуном, а лонжерони рами транспортного засобу шарнірно сполучені з віссю керованих коліс таким чином, що винесені за зони їх обертання.
Шарнірний привід

Номер патенту: 578
Опубліковано: 16.10.2000
Автори: Корольов Сергій Михайлович, Бойченко Тамара Михайлівна, Пуриш Валентин Захарович
МПК: B25J 17/00
Формула / Реферат:
1. Шарнірний привід, що складається із корпуса, неповноповоротного моментного силового циліндра, золотника, приводу золотника, який відрізняється тим, що як привід золотника застосовано крокуючий електродвигун.2. Шарнірний привід по п. 1, який відрізняється тим, що він оснащений датчиком відпрацьованого кута.3. Шарнірний привід по п. 2, який відрізняється тим, що датчики відпрацьованого кута застосовано синусно-косинусний...
Інтерфейсний виконавчий механізм клапана
Номер патенту: 71896
Опубліковано: 17.01.2005
Автори: Николайчук Ярослав Миколайович, Перцович Іван Васильович
МПК: F16K 31/04
Мітки: механізм, клапана, інтерфейсний, виконавчий
Формула / Реферат:
Інтерфейсний виконавчий механізм клапана трубопроводу, який складений з арматури клапана, крокового двигуна приводу цієї арматури та блока керування клапаном, який відрізняється тим, що блок керування розташовано безпосередньо на приводі арматури, а привід обладнано окремо встановленими на ньому додатковими кроковими двигунами з можливістю їхньої сумісної роботи в процесі керування в синхронному режимі.
Попередній патент: Модульна панель для будівництва
Наступний патент: Спосіб одержання мінеральної добавки до цементу
Випадковий патент: Маніпулятор доїльного апарата