Механізм петельника швейної машини ланцюгового стібка
Номер патенту: 67727
Опубліковано: 12.03.2012
Автори: Чередник Андрій Олександрович, Орловський Броніслав Вікентійович
Формула / Реферат
Механізм петельника швейної машини ланцюгового стібка, що містить просторовий та плоский кінематичні ланцюги, де просторовий кінематичний ланцюг містить закріплений на головному валу перший ексцентрик, який з'єднаний обертальною кінематичною парою з шатуном, який утворює сферичну кінематичну пару з плечем просторового коромисла, на якому закріплений петельник, а плоский кінематичний ланцюг містить кривошип у вигляді другого ексцентрика, який відрізняється тим, що оснащений додатковим шатуном, просторовою кулісою, через яку додатковий шатун з'єднаний з петельником, та утворює обертальну сферичну кінематичну пару з другим ексцентриком.
Текст
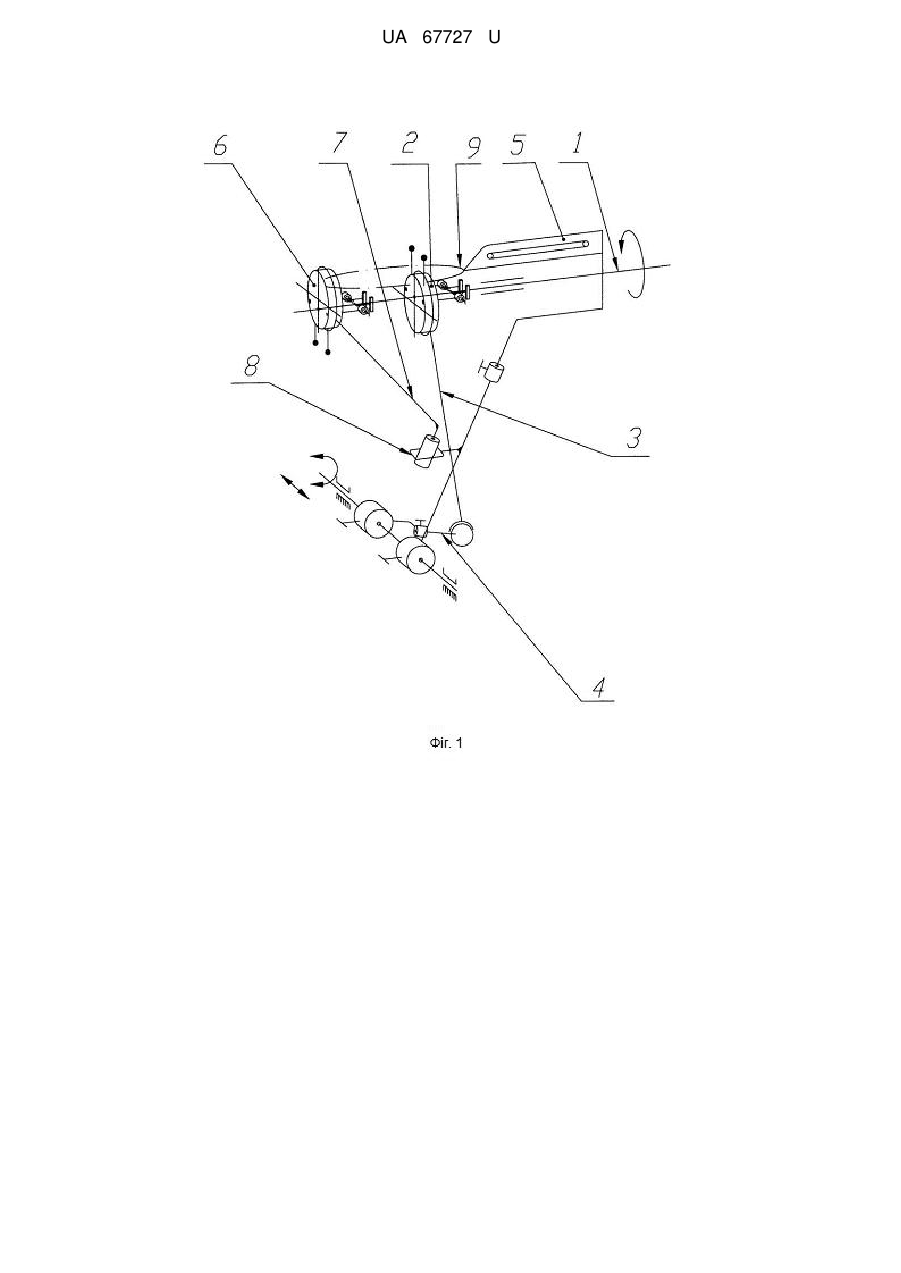
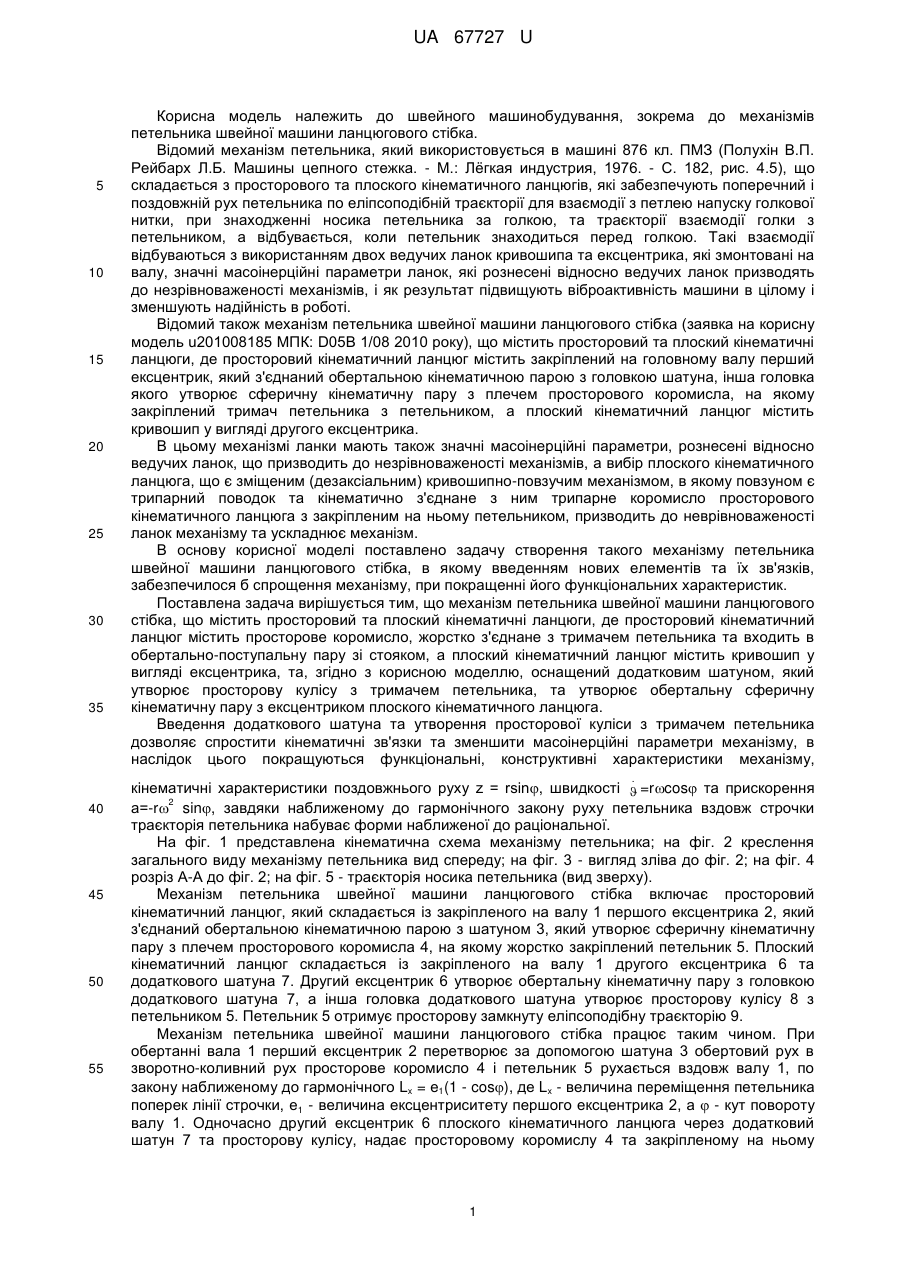
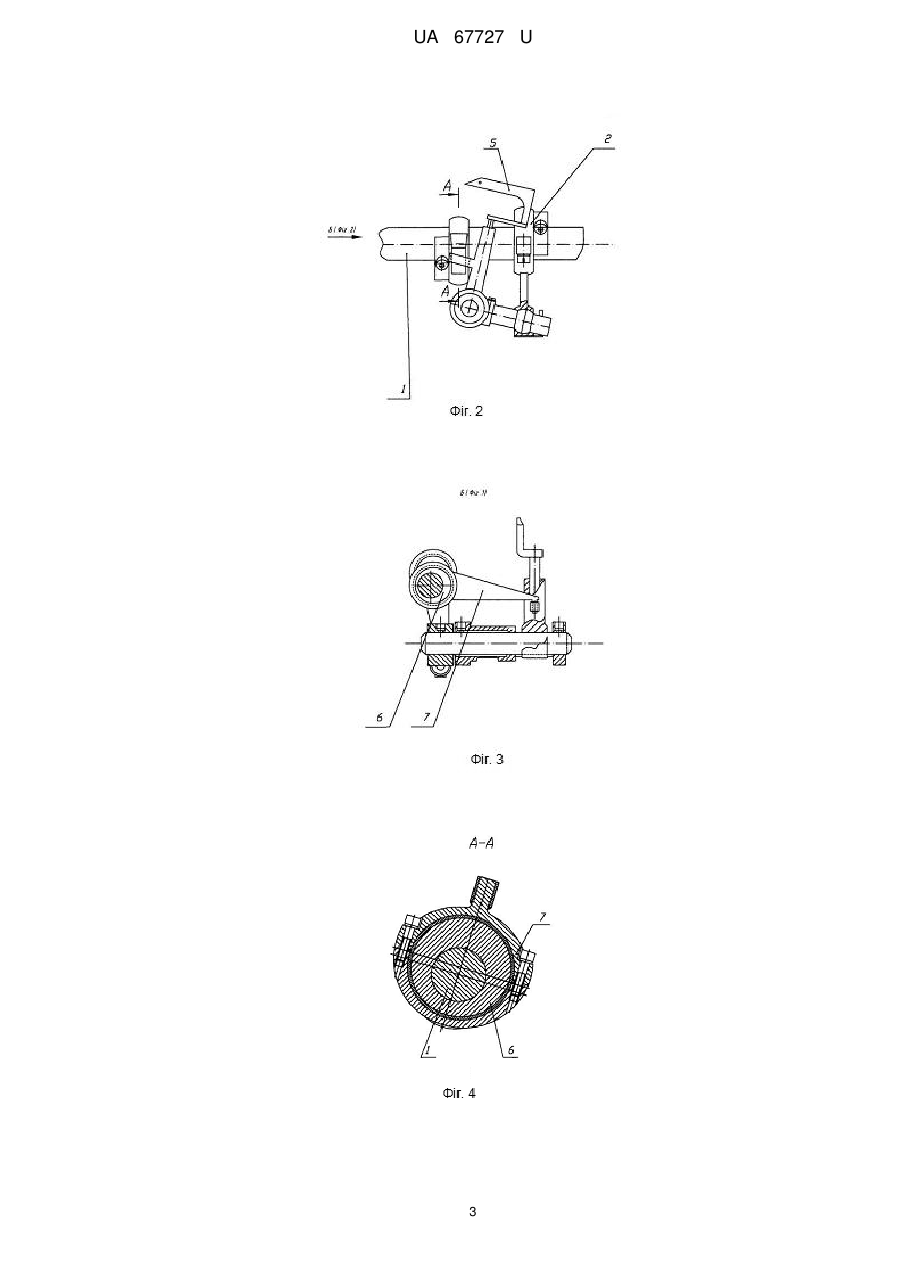
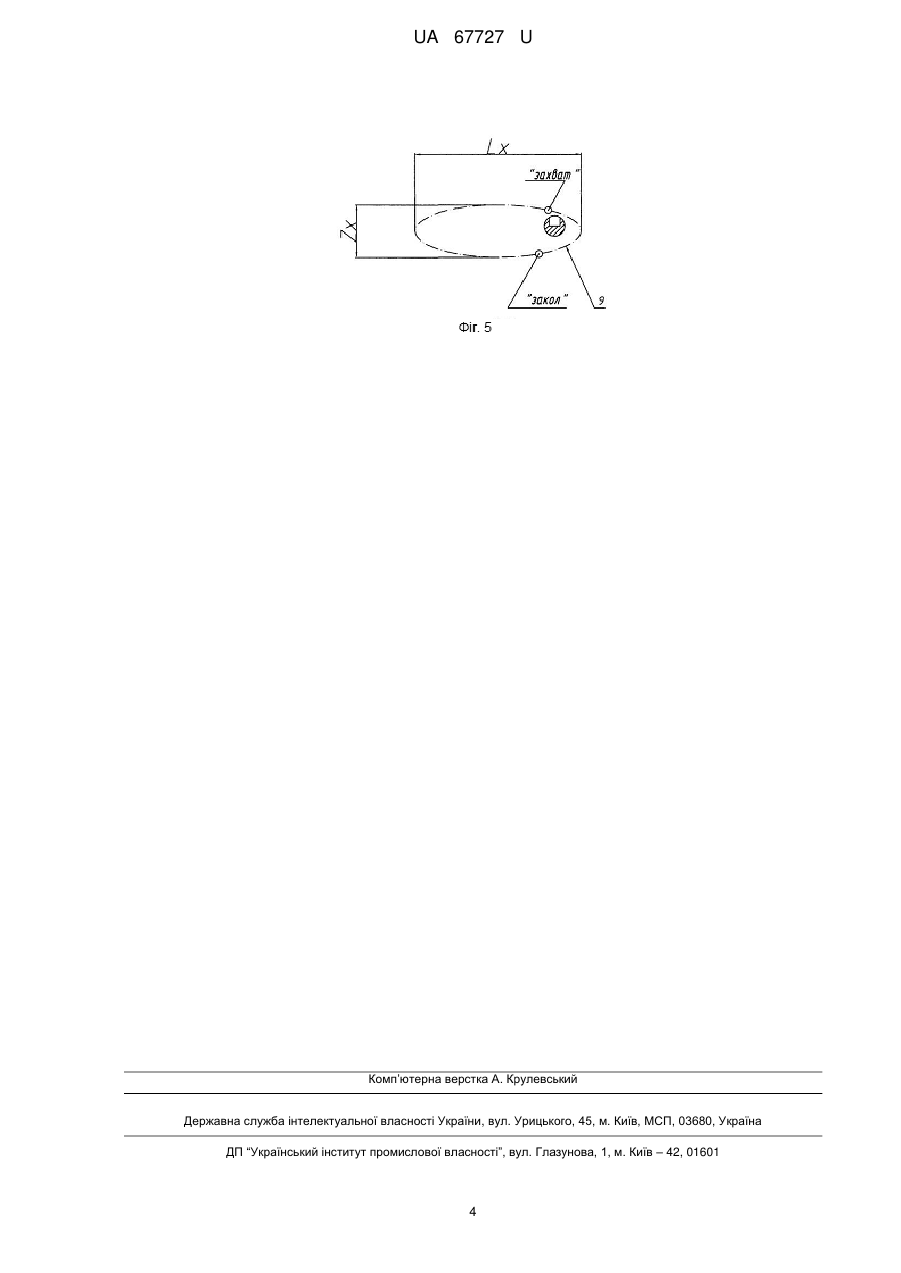
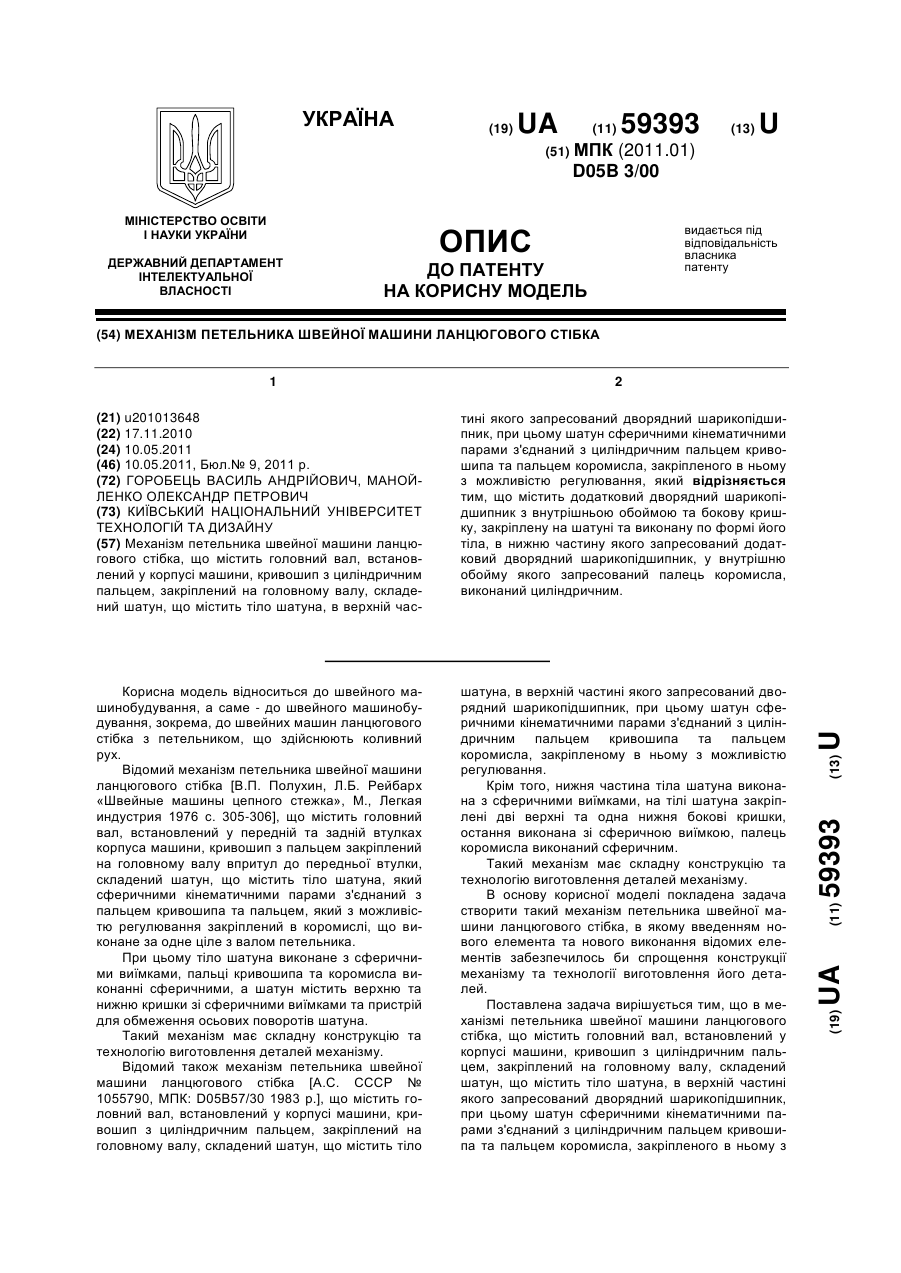
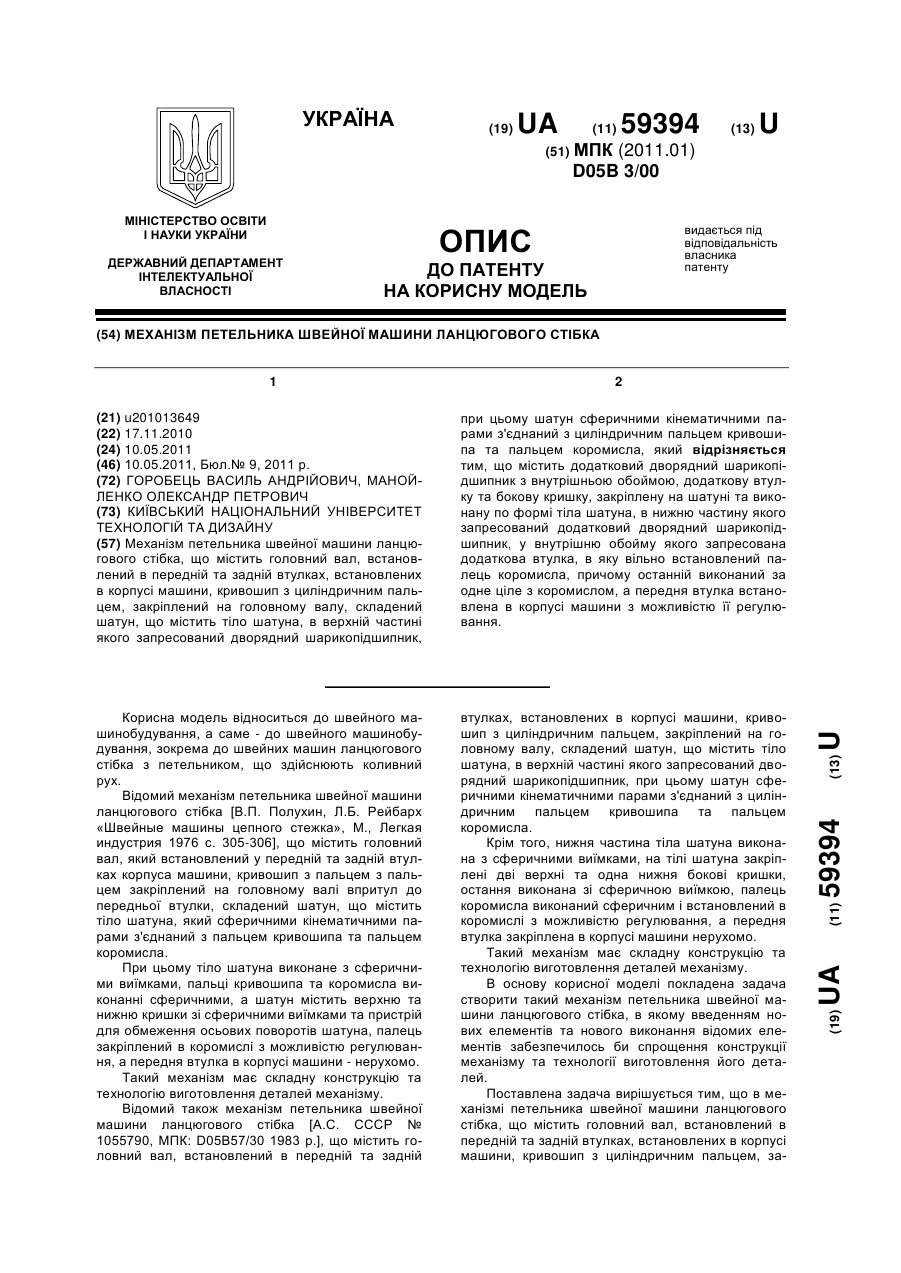
Реферат: UA 67727 U UA 67727 U 5 10 15 20 25 30 35 Корисна модель належить до швейного машинобудування, зокрема до механізмів петельника швейної машини ланцюгового стібка. Відомий механізм петельника, який використовується в машині 876 кл. ПМЗ (Полухін В.П. Рейбарх Л.Б. Машины цепного стежка. - М.: Лѐгкая индустрия, 1976. - С. 182, рис. 4.5), що складається з просторового та плоского кінематичного ланцюгів, які забезпечують поперечний і поздовжній рух петельника по еліпсоподібній траєкторії для взаємодії з петлею напуску голкової нитки, при знаходженні носика петельника за голкою, та траєкторії взаємодії голки з петельником, а відбувається, коли петельник знаходиться перед голкою. Такі взаємодії відбуваються з використанням двох ведучих ланок кривошипа та ексцентрика, які змонтовані на валу, значні масоінерційні параметри ланок, які рознесені відносно ведучих ланок призводять до незрівноваженості механізмів, і як результат підвищують віброактивність машини в цілому і зменшують надійність в роботі. Відомий також механізм петельника швейної машини ланцюгового стібка (заявка на корисну модель u201008185 МПК: D05В 1/08 2010 року), що містить просторовий та плоский кінематичні ланцюги, де просторовий кінематичний ланцюг містить закріплений на головному валу перший ексцентрик, який з'єднаний обертальною кінематичною парою з головкою шатуна, інша головка якого утворює сферичну кінематичну пару з плечем просторового коромисла, на якому закріплений тримач петельника з петельником, а плоский кінематичний ланцюг містить кривошип у вигляді другого ексцентрика. В цьому механізмі ланки мають також значні масоінерційні параметри, рознесені відносно ведучих ланок, що призводить до незрівноваженості механізмів, а вибір плоского кінематичного ланцюга, що є зміщеним (дезаксіальним) кривошипно-повзучим механізмом, в якому повзуном є трипарний поводок та кінематично з'єднане з ним трипарне коромисло просторового кінематичного ланцюга з закріпленим на ньому петельником, призводить до неврівноваженості ланок механізму та ускладнює механізм. В основу корисної моделі поставлено задачу створення такого механізму петельника швейної машини ланцюгового стібка, в якому введенням нових елементів та їх зв'язків, забезпечилося б спрощення механізму, при покращенні його функціональних характеристик. Поставлена задача вирішується тим, що механізм петельника швейної машини ланцюгового стібка, що містить просторовий та плоский кінематичні ланцюги, де просторовий кінематичний ланцюг містить просторове коромисло, жорстко з'єднане з тримачем петельника та входить в обертально-поступальну пару зі стояком, а плоский кінематичний ланцюг містить кривошип у вигляді ексцентрика, та, згідно з корисною моделлю, оснащений додатковим шатуном, який утворює просторову кулісу з тримачем петельника, та утворює обертальну сферичну кінематичну пару з ексцентриком плоского кінематичного ланцюга. Введення додаткового шатуна та утворення просторової куліси з тримачем петельника дозволяє спростити кінематичні зв'язки та зменшити масоінерційні параметри механізму, в наслідок цього покращуються функціональні, конструктивні характеристики механізму, . 40 45 50 55 кінематичні характеристики поздовжнього руху z = rsin, швидкості =rcos та прискорення 2 а=-r sin, завдяки наближеному до гармонічного закону руху петельника вздовж строчки траєкторія петельника набуває форми наближеної до раціональної. На фіг. 1 представлена кінематична схема механізму петельника; на фіг. 2 креслення загального виду механізму петельника вид спереду; на фіг. 3 - вигляд зліва до фіг. 2; на фіг. 4 розріз А-А до фіг. 2; на фіг. 5 - траєкторія носика петельника (вид зверху). Механізм петельника швейної машини ланцюгового стібка включає просторовий кінематичний ланцюг, який складається із закріпленого на валу 1 першого ексцентрика 2, який з'єднаний обертальною кінематичною парою з шатуном 3, який утворює сферичну кінематичну пару з плечем просторового коромисла 4, на якому жорстко закріплений петельник 5. Плоский кінематичний ланцюг складається із закріпленого на валу 1 другого ексцентрика 6 та додаткового шатуна 7. Другий ексцентрик 6 утворює обертальну кінематичну пару з головкою додаткового шатуна 7, а інша головка додаткового шатуна утворює просторову кулісу 8 з петельником 5. Петельник 5 отримує просторову замкнуту еліпсоподібну траєкторію 9. Механізм петельника швейної машини ланцюгового стібка працює таким чином. При обертанні вала 1 перший ексцентрик 2 перетворює за допомогою шатуна 3 обертовий рух в зворотно-коливний рух просторове коромисло 4 і петельник 5 рухається вздовж валу 1, по закону наближеному до гармонічного Lx = е1(1 - cos), де Lx - величина переміщення петельника поперек лінії строчки, е1 - величина ексцентриситету першого ексцентрика 2, а - кут повороту валу 1. Одночасно другий ексцентрик 6 плоского кінематичного ланцюга через додатковий шатун 7 та просторову кулісу, надає просторовому коромислу 4 та закріпленому на ньому 1 UA 67727 U тримачу петельника з петельником 5 рух поперек вала 1, тобто вздовж лінії строчки, але вже по синусоїдальному закону z=e2sin де е2 - величина ексцентриситету ексцентрика 6. В результаті складання поперечної складової руху петельника L() та поздовжньої складової Z() петельник отримує просторову замкнуту еліпсоподібну траєкторію 8. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Механізм петельника швейної машини ланцюгового стібка, що містить просторовий та плоский кінематичні ланцюги, де просторовий кінематичний ланцюг містить закріплений на головному валу перший ексцентрик, який з'єднаний обертальною кінематичною парою з шатуном, який утворює сферичну кінематичну пару з плечем просторового коромисла, на якому закріплений петельник, а плоский кінематичний ланцюг містить кривошип у вигляді другого ексцентрика, який відрізняється тим, що оснащений додатковим шатуном, просторовою кулісою, через яку додатковий шатун з'єднаний з петельником, та утворює обертальну сферичну кінематичну пару з другим ексцентриком. 2 UA 67727 U 3 UA 67727 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюLooper mechanism of a chain stitch sewing machine
Автори англійськоюOrlovskyi Bronislav Vikentiiovych, Cherednyk Andrii Oleksandrovych
Назва патенту російськоюМеханизм петлителя швейной машины цепного стежка
Автори російськоюОрловский Бронислав Викентьевич, Чередник Андрей Александрович
МПК / Мітки
МПК: D05B 1/00
Мітки: ланцюгового, петельника, машини, механізм, швейної, стібка
Код посилання
<a href="https://ua.patents.su/6-67727-mekhanizm-petelnika-shvejjno-mashini-lancyugovogo-stibka.html" target="_blank" rel="follow" title="База патентів України">Механізм петельника швейної машини ланцюгового стібка</a>
Механізм петельника швейної машини ланцюгового стібка

Номер патенту: 56716
Опубліковано: 25.01.2011
Автори: Пищиков В'ячеслав Олексійович, Єсипенко Катерина Володимирівна
МПК: D05B 1/00
Мітки: петельника, ланцюгового, швейної, машини, стібка, механізм
Формула / Реферат:
Механізм петельника швейної машини ланцюгового стібка, що складається з просторового та плоского кінематичних ланцюгів, де просторовий кінематичний ланцюг містить кривошип у вигляді коліна вала, шатун, що утворює з кривошипом сферичну кінематичну пару, трипарне просторове коромисло, жорстко з'єднане з петельником та входить в обертально-поступальну пару зі стояком, що утворює з шатуном дворухому сферичну пару, а плоский кінематичний ланцюг...
Механізм петельника швейної машини ланцюгового стібка
Номер патенту: 59393
Опубліковано: 10.05.2011
Автори: Горобець Василь Андрійович, Манойленко Олександр Петрович
МПК: D05B 3/00
Мітки: петельника, ланцюгового, стібка, швейної, механізм, машини
Формула / Реферат:
Механізм петельника швейної машини ланцюгового стібка, що містить головний вал, встановлений у корпусі машини, кривошип з циліндричним пальцем, закріплений на головному валу, складений шатун, що містить тіло шатуна, в верхній частині якого запресований дворядний шарикопідшипник, при цьому шатун сферичними кінематичними парами з'єднаний з циліндричним пальцем кривошипа та пальцем коромисла, закріпленого в ньому з можливістю регулювання, який...
Механізм петельника швейної машини ланцюгового стібка
Номер патенту: 59394
Опубліковано: 10.05.2011
Автори: Манойленко Олександр Петрович, Горобець Василь Андрійович
МПК: D05B 3/00
Мітки: швейної, ланцюгового, петельника, машини, механізм, стібка
Формула / Реферат:
Механізм петельника швейної машини ланцюгового стібка, що містить головний вал, встановлений в передній та задній втулках, встановлених в корпусі машини, кривошип з циліндричним пальцем, закріплений на головному валу, складений шатун, що містить тіло шатуна, в верхній частині якого запресований дворядний шарикопідшипник, при цьому шатун сферичними кінематичними парами з'єднаний з циліндричним пальцем кривошипа та пальцем коромисла, який...
Механізм голки та ниткопритягувача швейної машини човникового стібка
Номер патенту: 62073
Опубліковано: 10.08.2011
Автори: Орловський Броніслав Вікентійович, Ануріна Юлія Олександрівна
МПК: D05B 3/00
Мітки: ниткопритягувача, стібка, машини, швейної, човникового, механізм, голки
Формула / Реферат:
Механізм голки та ниткопритягувача швейної машини човникового стібка, що складається з головного вала, на кінці якого закріплений кривошип, коромисла, кінематично з'єднаного з кривошипом з можливістю повороту відносно нього, колінчастого пальця, жорстко закріпленого за допомогою гвинта в отворі кривошипа для кінематичного зв'язку з шатунами механізму голки та ниткопритягувача, який відрізняється тим, що колінчастий палець оснащений...
Механізм транспортування матеріалу човникової швейної машини

Номер патенту: 45116
Опубліковано: 26.10.2009
Автори: Пищиков В'ячеслав Олексійович, Поладич Іван Валентинович
МПК: D05B 27/00
Мітки: машини, матеріалу, човникової, транспортування, швейної, механізм
Формула / Реферат:
Механізм транспортування матеріалу човникової швейної машини, що містить дві функціональні групи горизонтального та вертикального переміщення, остання з яких включає тричленний кривошип, кінематично з'єднаний з шатуном, що утворює обертову кінематичну пару з тричленним коромислом, та діаду першого виду, яка включає шатун, на якому закріплена зубчаста рейка, та короткий шатун, який відрізняється тим, що короткий шатун виконаний у вигляді...