Пристрій попереднього розвороту операційних елементів багатофункціональної діагностико-хірургічної робототехнічної системи операційного стола з можливістю інформаційно-комп’ютерного керування ім. ю.і. русанова

Формула / Реферат
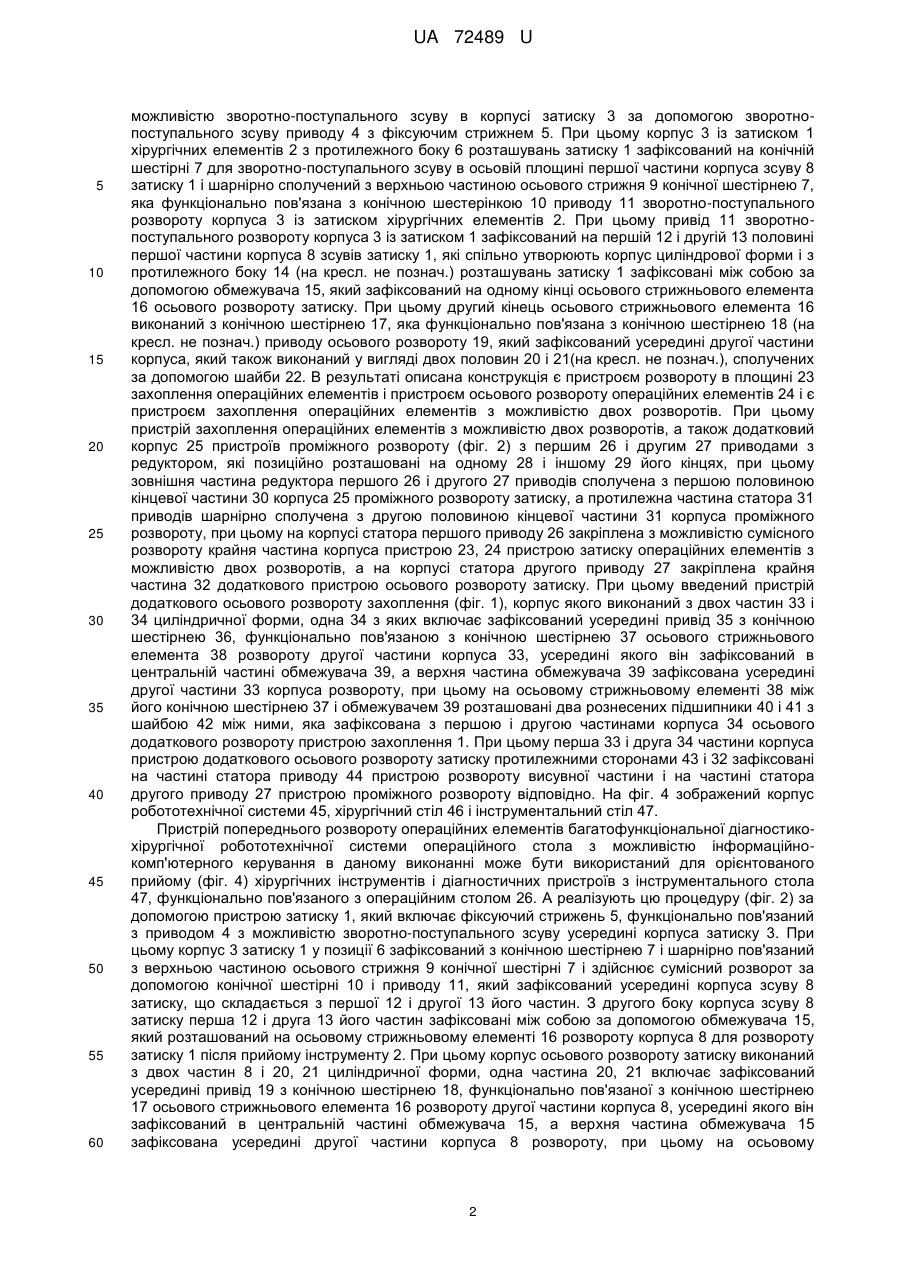
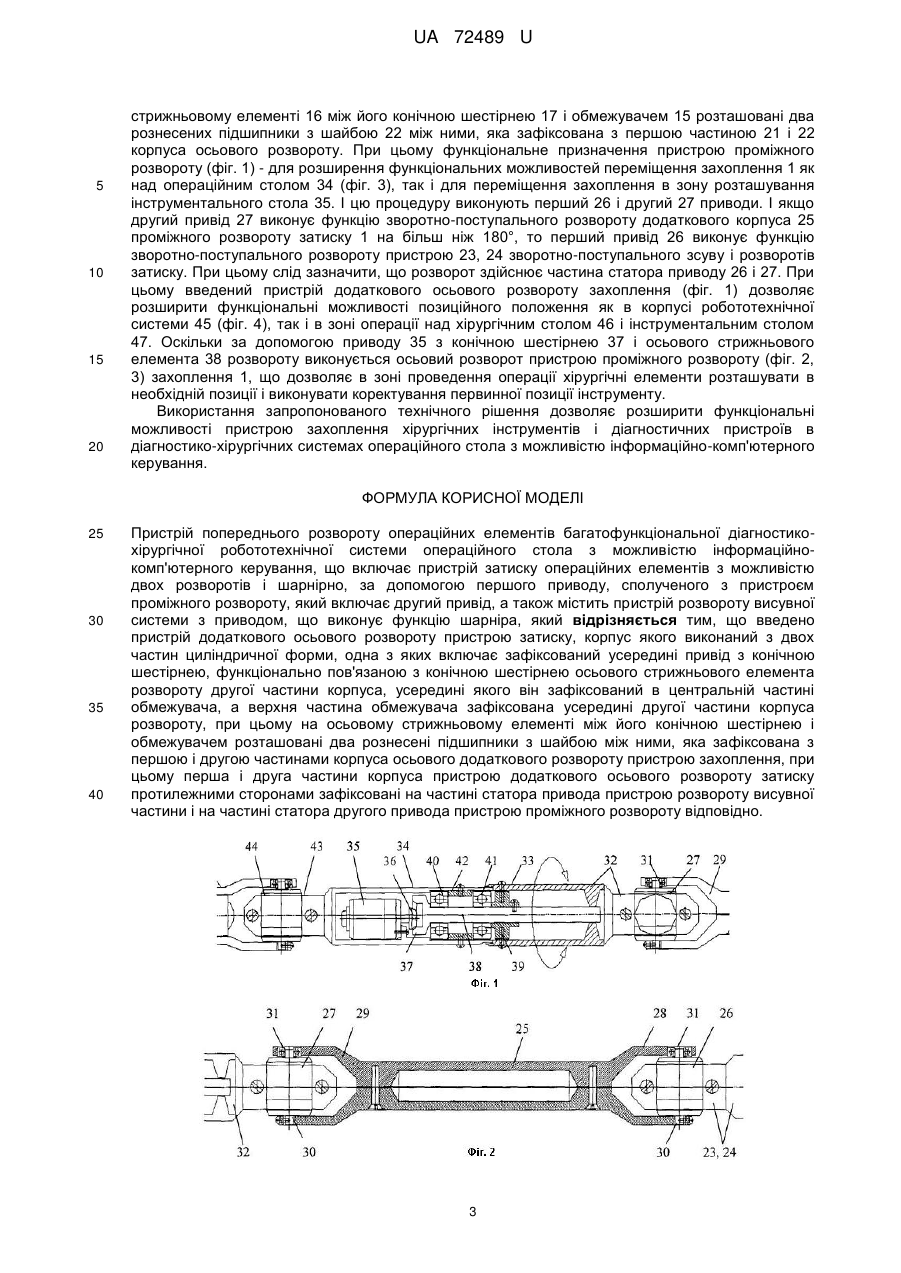
Пристрій попереднього розвороту операційних елементів багатофункціональної діагностико-хірургічної робототехнічної системи операційного стола з можливістю інформаційно-комп'ютерного керування, що включає пристрій затиску операційних елементів з можливістю двох розворотів і шарнірно, за допомогою першого приводу, сполученого з пристроєм проміжного розвороту, який включає другий привід, а також містить пристрій розвороту висувної системи з приводом, що виконує функцію шарніра, який відрізняється тим, що введено пристрій додаткового осьового розвороту пристрою затиску, корпус якого виконаний з двох частин циліндричної форми, одна з яких включає зафіксований усередині привід з конічною шестірнею, функціонально пов'язаною з конічною шестірнею осьового стрижньового елемента розвороту другої частини корпуса, усередині якого він зафіксований в центральній частині обмежувача, а верхня частина обмежувача зафіксована усередині другої частини корпуса розвороту, при цьому на осьовому стрижньовому елементі між його конічною шестірнею і обмежувачем розташовані два рознесені підшипники з шайбою між ними, яка зафіксована з першою і другою частинами корпуса осьового додаткового розвороту пристрою захоплення, при цьому перша і друга частини корпуса пристрою додаткового осьового розвороту затиску протилежними сторонами зафіксовані на частині статора привода пристрою розвороту висувної частини і на частині статора другого привода пристрою проміжного розвороту відповідно.
Текст
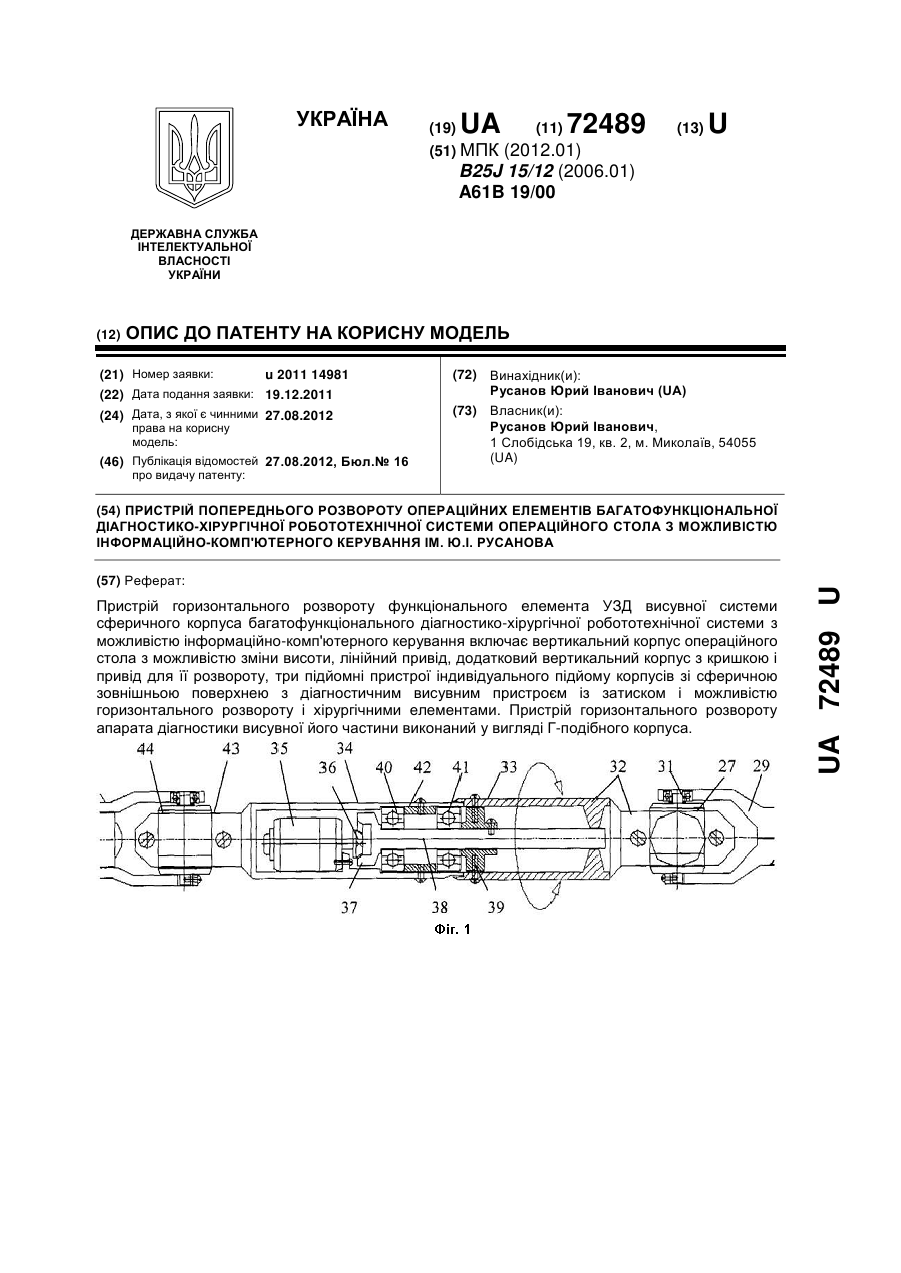
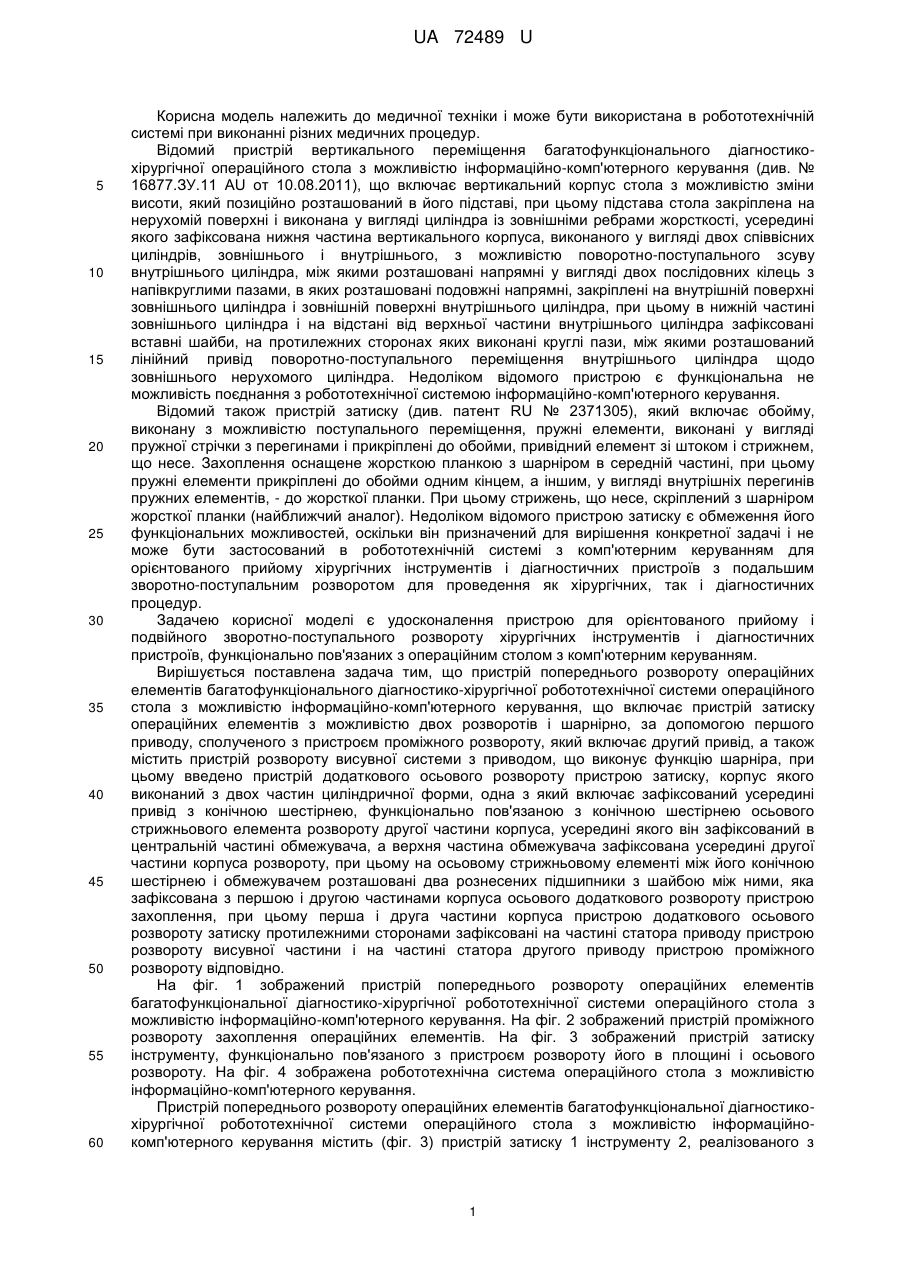
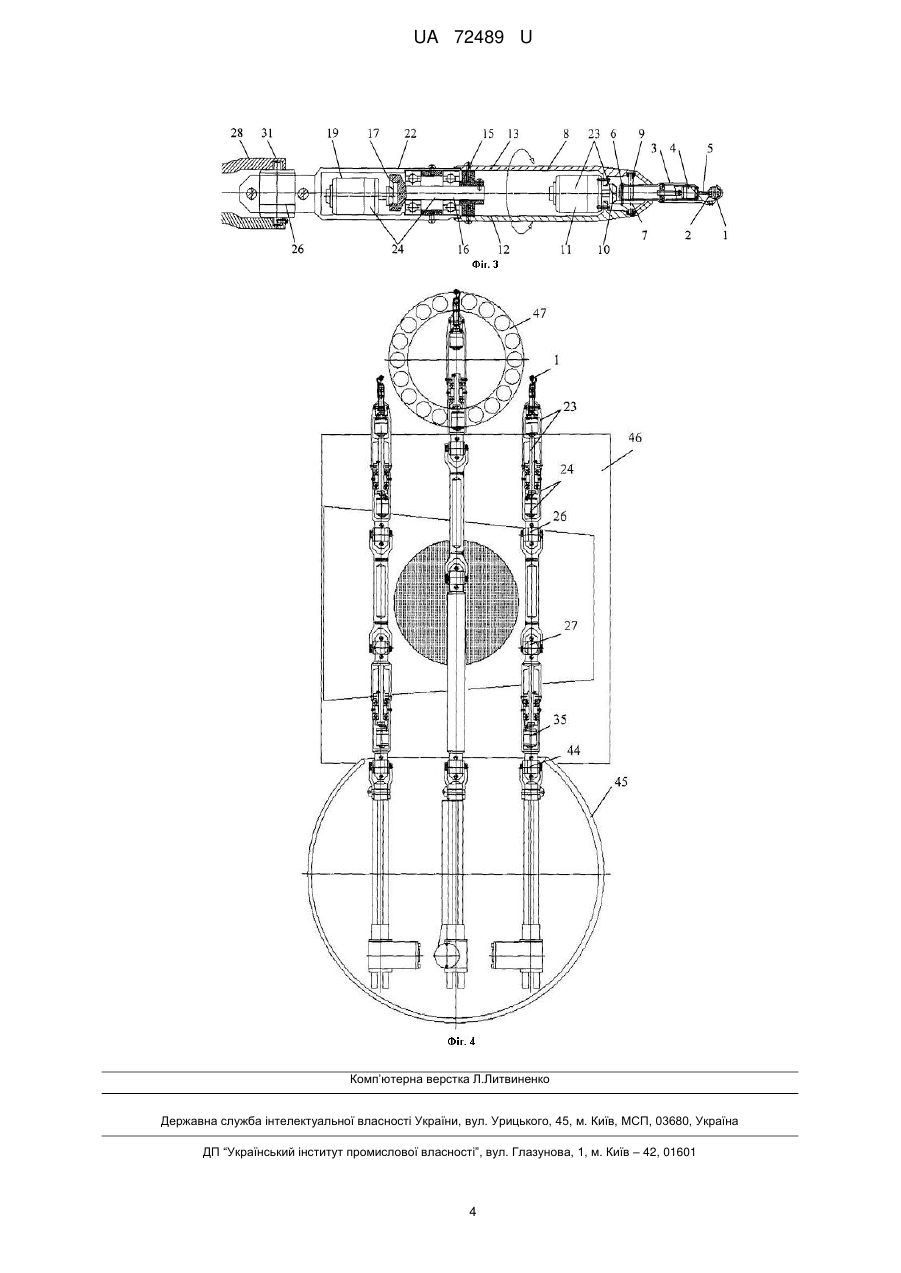
Реферат: Пристрій горизонтального розвороту функціонального елемента УЗД висувної системи сферичного корпуса багатофункціонального діагностико-хірургічної робототехнічної системи з можливістю інформаційно-комп'ютерного керування включає вертикальний корпус операційного стола з можливістю зміни висоти, лінійний привід, додатковий вертикальний корпус з кришкою і привід для її розвороту, три підйомні пристрої індивідуального підйому корпусів зі сферичною зовнішньою поверхнею з діагностичним висувним пристроєм із затиском і можливістю горизонтального розвороту і хірургічними елементами. Пристрій горизонтального розвороту апарата діагностики висувної його частини виконаний у вигляді Г-подібного корпуса. UA 72489 U (54) ПРИСТРІЙ ПОПЕРЕДНЬОГО РОЗВОРОТУ ОПЕРАЦІЙНИХ ЕЛЕМЕНТІВ БАГАТОФУНКЦІОНАЛЬНОЇ ДІАГНОСТИКО-ХІРУРГІЧНОЇ РОБОТОТЕХНІЧНОЇ СИСТЕМИ ОПЕРАЦІЙНОГО СТОЛА З МОЖЛИВІСТЮ ІНФОРМАЦІЙНО-КОМП'ЮТЕРНОГО КЕРУВАННЯ ІМ. Ю.І. РУСАНОВА UA 72489 U UA 72489 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до медичної техніки і може бути використана в робототехнічній системі при виконанні різних медичних процедур. Відомий пристрій вертикального переміщення багатофункціонального діагностикохірургічної операційного стола з можливістю інформаційно-комп'ютерного керування (див. № 16877.ЗУ.11 AU от 10.08.2011), що включає вертикальний корпус стола з можливістю зміни висоти, який позиційно розташований в його підставі, при цьому підстава стола закріплена на нерухомій поверхні і виконана у вигляді циліндра із зовнішніми ребрами жорсткості, усередині якого зафіксована нижня частина вертикального корпуса, виконаного у вигляді двох співвісних циліндрів, зовнішнього і внутрішнього, з можливістю поворотно-поступального зсуву внутрішнього циліндра, між якими розташовані напрямні у вигляді двох послідовних кілець з напівкруглими пазами, в яких розташовані подовжні напрямні, закріплені на внутрішній поверхні зовнішнього циліндра і зовнішній поверхні внутрішнього циліндра, при цьому в нижній частині зовнішнього циліндра і на відстані від верхньої частини внутрішнього циліндра зафіксовані вставні шайби, на протилежних сторонах яких виконані круглі пази, між якими розташований лінійний привід поворотно-поступального переміщення внутрішнього циліндра щодо зовнішнього нерухомого циліндра. Недоліком відомого пристрою є функціональна не можливість поєднання з робототехнічної системою інформаційно-комп'ютерного керування. Відомий також пристрій затиску (див. патент RU № 2371305), який включає обойму, виконану з можливістю поступального переміщення, пружні елементи, виконані у вигляді пружної стрічки з перегинами і прикріплені до обойми, привідний елемент зі штоком і стрижнем, що несе. Захоплення оснащене жорсткою планкою з шарніром в середній частині, при цьому пружні елементи прикріплені до обойми одним кінцем, а іншим, у вигляді внутрішніх перегинів пружних елементів, - до жорсткої планки. При цьому стрижень, що несе, скріплений з шарніром жорсткої планки (найближчий аналог). Недоліком відомого пристрою затиску є обмеження його функціональних можливостей, оскільки він призначений для вирішення конкретної задачі і не може бути застосований в робототехнічній системі з комп'ютерним керуванням для орієнтованого прийому хірургічних інструментів і діагностичних пристроїв з подальшим зворотно-поступальним розворотом для проведення як хірургічних, так і діагностичних процедур. Задачею корисної моделі є удосконалення пристрою для орієнтованого прийому і подвійного зворотно-поступального розвороту хірургічних інструментів і діагностичних пристроїв, функціонально пов'язаних з операційним столом з комп'ютерним керуванням. Вирішується поставлена задача тим, що пристрій попереднього розвороту операційних елементів багатофункціонального діагностико-хірургічної робототехнічної системи операційного стола з можливістю інформаційно-комп'ютерного керування, що включає пристрій затиску операційних елементів з можливістю двох розворотів і шарнірно, за допомогою першого приводу, сполученого з пристроєм проміжного розвороту, який включає другий привід, а також містить пристрій розвороту висувної системи з приводом, що виконує функцію шарніра, при цьому введено пристрій додаткового осьового розвороту пристрою затиску, корпус якого виконаний з двох частин циліндричної форми, одна з який включає зафіксований усередині привід з конічною шестірнею, функціонально пов'язаною з конічною шестірнею осьового стрижньового елемента розвороту другої частини корпуса, усередині якого він зафіксований в центральній частині обмежувача, а верхня частина обмежувача зафіксована усередині другої частини корпуса розвороту, при цьому на осьовому стрижньовому елементі між його конічною шестірнею і обмежувачем розташовані два рознесених підшипники з шайбою між ними, яка зафіксована з першою і другою частинами корпуса осьового додаткового розвороту пристрою захоплення, при цьому перша і друга частини корпуса пристрою додаткового осьового розвороту затиску протилежними сторонами зафіксовані на частині статора приводу пристрою розвороту висувної частини і на частині статора другого приводу пристрою проміжного розвороту відповідно. На фіг. 1 зображений пристрій попереднього розвороту операційних елементів багатофункціональної діагностико-хірургічної робототехнічної системи операційного стола з можливістю інформаційно-комп'ютерного керування. На фіг. 2 зображений пристрій проміжного розвороту захоплення операційних елементів. На фіг. 3 зображений пристрій затиску інструменту, функціонально пов'язаного з пристроєм розвороту його в площині і осьового розвороту. На фіг. 4 зображена робототехнічна система операційного стола з можливістю інформаційно-комп'ютерного керування. Пристрій попереднього розвороту операційних елементів багатофункціональної діагностикохірургічної робототехнічної системи операційного стола з можливістю інформаційнокомп'ютерного керування містить (фіг. 3) пристрій затиску 1 інструменту 2, реалізованого з 1 UA 72489 U 5 10 15 20 25 30 35 40 45 50 55 60 можливістю зворотно-поступального зсуву в корпусі затиску 3 за допомогою зворотнопоступального зсуву приводу 4 з фіксуючим стрижнем 5. При цьому корпус 3 із затиском 1 хірургічних елементів 2 з протилежного боку 6 розташувань затиску 1 зафіксований на конічній шестірні 7 для зворотно-поступального зсуву в осьовій площині першої частини корпуса зсуву 8 затиску 1 і шарнірно сполучений з верхньою частиною осьового стрижня 9 конічної шестірнею 7, яка функціонально пов'язана з конічною шестерінкою 10 приводу 11 зворотно-поступального розвороту корпуса 3 із затиском хірургічних елементів 2. При цьому привід 11 зворотнопоступального розвороту корпуса 3 із затиском 1 зафіксований на першій 12 і другій 13 половині першої частини корпуса 8 зсувів затиску 1, які спільно утворюють корпус циліндрової форми і з протилежного боку 14 (на кресл. не познач.) розташувань затиску 1 зафіксовані між собою за допомогою обмежувача 15, який зафіксований на одному кінці осьового стрижньового елемента 16 осьового розвороту затиску. При цьому другий кінець осьового стрижньового елемента 16 виконаний з конічною шестірнею 17, яка функціонально пов'язана з конічною шестірнею 18 (на кресл. не познач.) приводу осьового розвороту 19, який зафіксований усередині другої частини корпуса, який також виконаний у вигляді двох половин 20 і 21(на кресл. не познач.), сполучених за допомогою шайби 22. В результаті описана конструкція є пристроєм розвороту в площині 23 захоплення операційних елементів і пристроєм осьового розвороту операційних елементів 24 і є пристроєм захоплення операційних елементів з можливістю двох розворотів. При цьому пристрій захоплення операційних елементів з можливістю двох розворотів, а також додатковий корпус 25 пристроїв проміжного розвороту (фіг. 2) з першим 26 і другим 27 приводами з редуктором, які позиційно розташовані на одному 28 і іншому 29 його кінцях, при цьому зовнішня частина редуктора першого 26 і другого 27 приводів сполучена з першою половиною кінцевої частини 30 корпуса 25 проміжного розвороту затиску, а протилежна частина статора 31 приводів шарнірно сполучена з другою половиною кінцевої частини 31 корпуса проміжного розвороту, при цьому на корпусі статора першого приводу 26 закріплена з можливістю сумісного розвороту крайня частина корпуса пристрою 23, 24 пристрою затиску операційних елементів з можливістю двох розворотів, а на корпусі статора другого приводу 27 закріплена крайня частина 32 додаткового пристрою осьового розвороту затиску. При цьому введений пристрій додаткового осьового розвороту захоплення (фіг. 1), корпус якого виконаний з двох частин 33 і 34 циліндричної форми, одна 34 з яких включає зафіксований усередині привід 35 з конічною шестірнею 36, функціонально пов'язаною з конічною шестірнею 37 осьового стрижньового елемента 38 розвороту другої частини корпуса 33, усередині якого він зафіксований в центральній частині обмежувача 39, а верхня частина обмежувача 39 зафіксована усередині другої частини 33 корпуса розвороту, при цьому на осьовому стрижньовому елементі 38 між його конічною шестірнею 37 і обмежувачем 39 розташовані два рознесених підшипники 40 і 41 з шайбою 42 між ними, яка зафіксована з першою і другою частинами корпуса 34 осьового додаткового розвороту пристрою захоплення 1. При цьому перша 33 і друга 34 частини корпуса пристрою додаткового осьового розвороту затиску протилежними сторонами 43 і 32 зафіксовані на частині статора приводу 44 пристрою розвороту висувної частини і на частині статора другого приводу 27 пристрою проміжного розвороту відповідно. На фіг. 4 зображений корпус робототехнічної системи 45, хірургічний стіл 46 і інструментальний стіл 47. Пристрій попереднього розвороту операційних елементів багатофункціональної діагностикохірургічної робототехнічної системи операційного стола з можливістю інформаційнокомп'ютерного керування в даному виконанні може бути використаний для орієнтованого прийому (фіг. 4) хірургічних інструментів і діагностичних пристроїв з інструментального стола 47, функціонально пов'язаного з операційним столом 26. А реалізують цю процедуру (фіг. 2) за допомогою пристрою затиску 1, який включає фіксуючий стрижень 5, функціонально пов'язаний з приводом 4 з можливістю зворотно-поступального зсуву усередині корпуса затиску 3. При цьому корпус 3 затиску 1 у позиції 6 зафіксований з конічною шестірнею 7 і шарнірно пов'язаний з верхньою частиною осьового стрижня 9 конічної шестірні 7 і здійснює сумісний розворот за допомогою конічної шестірні 10 і приводу 11, який зафіксований усередині корпуса зсуву 8 затиску, що складається з першої 12 і другої 13 його частин. З другого боку корпуса зсуву 8 затиску перша 12 і друга 13 його частин зафіксовані між собою за допомогою обмежувача 15, який розташований на осьовому стрижньовому елементі 16 розвороту корпуса 8 для розвороту затиску 1 після прийому інструменту 2. При цьому корпус осьового розвороту затиску виконаний з двох частин 8 і 20, 21 циліндричної форми, одна частина 20, 21 включає зафіксований усередині привід 19 з конічною шестірнею 18, функціонально пов'язаної з конічною шестірнею 17 осьового стрижньового елемента 16 розвороту другої частини корпуса 8, усередині якого він зафіксований в центральній частині обмежувача 15, а верхня частина обмежувача 15 зафіксована усередині другої частини корпуса 8 розвороту, при цьому на осьовому 2 UA 72489 U 5 10 15 20 стрижньовому елементі 16 між його конічною шестірнею 17 і обмежувачем 15 розташовані два рознесених підшипники з шайбою 22 між ними, яка зафіксована з першою частиною 21 і 22 корпуса осьового розвороту. При цьому функціональне призначення пристрою проміжного розвороту (фіг. 1) - для розширення функціональних можливостей переміщення захоплення 1 як над операційним столом 34 (фіг. 3), так і для переміщення захоплення в зону розташування інструментального стола 35. І цю процедуру виконують перший 26 і другий 27 приводи. І якщо другий привід 27 виконує функцію зворотно-поступального розвороту додаткового корпуса 25 проміжного розвороту затиску 1 на більш ніж 180°, то перший привід 26 виконує функцію зворотно-поступального розвороту пристрою 23, 24 зворотно-поступального зсуву і розворотів затиску. При цьому слід зазначити, що розворот здійснює частина статора приводу 26 і 27. При цьому введений пристрій додаткового осьового розвороту захоплення (фіг. 1) дозволяє розширити функціональні можливості позиційного положення як в корпусі робототехнічної системи 45 (фіг. 4), так і в зоні операції над хірургічним столом 46 і інструментальним столом 47. Оскільки за допомогою приводу 35 з конічною шестірнею 37 і осьового стрижньового елемента 38 розвороту виконується осьовий розворот пристрою проміжного розвороту (фіг. 2, 3) захоплення 1, що дозволяє в зоні проведення операції хірургічні елементи розташувати в необхідній позиції і виконувати коректування первинної позиції інструменту. Використання запропонованого технічного рішення дозволяє розширити функціональні можливості пристрою захоплення хірургічних інструментів і діагностичних пристроїв в діагностико-хірургічних системах операційного стола з можливістю інформаційно-комп'ютерного керування. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 Пристрій попереднього розвороту операційних елементів багатофункціональної діагностикохірургічної робототехнічної системи операційного стола з можливістю інформаційнокомп'ютерного керування, що включає пристрій затиску операційних елементів з можливістю двох розворотів і шарнірно, за допомогою першого приводу, сполученого з пристроєм проміжного розвороту, який включає другий привід, а також містить пристрій розвороту висувної системи з приводом, що виконує функцію шарніра, який відрізняється тим, що введено пристрій додаткового осьового розвороту пристрою затиску, корпус якого виконаний з двох частин циліндричної форми, одна з яких включає зафіксований усередині привід з конічною шестірнею, функціонально пов'язаною з конічною шестірнею осьового стрижньового елемента розвороту другої частини корпуса, усередині якого він зафіксований в центральній частині обмежувача, а верхня частина обмежувача зафіксована усередині другої частини корпуса розвороту, при цьому на осьовому стрижньовому елементі між його конічною шестірнею і обмежувачем розташовані два рознесені підшипники з шайбою між ними, яка зафіксована з першою і другою частинами корпуса осьового додаткового розвороту пристрою захоплення, при цьому перша і друга частини корпуса пристрою додаткового осьового розвороту затиску протилежними сторонами зафіксовані на частині статора привода пристрою розвороту висувної частини і на частині статора другого привода пристрою проміжного розвороту відповідно. 3 UA 72489 U Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюHorizontal turning device for functional element of ultrasound of sliding system of spherical body of multifunctional diagnostic and surgical robotic system with possibility of information and computer control of rusanov
Автори англійськоюRusanov Yurii Ivanovych
Назва патенту російськоюУстройство горизонтального разворота функционального элемента узи выдвижной системы сферического корпуса многофункциональной диагностико-хирургической робототехнической системы с возможностью информационно-компьютерного управления ю.и.русанова
Автори російськоюРусанов Юрий Иванович
МПК / Мітки
МПК: A61B 19/00, B25J 15/12
Мітки: інформаційно-комп'ютерного, стола, керування, пристрій, русанова, багатофункціональної, розвороту, можливістю, діагностико-хірургічної, елементів, операційних, операційного, і.м, попереднього, системі, ю.і, робототехнічної
Код посилання
<a href="https://ua.patents.su/6-72489-pristrijj-poperednogo-rozvorotu-operacijjnikh-elementiv-bagatofunkcionalno-diagnostiko-khirurgichno-robototekhnichno-sistemi-operacijjnogo-stola-z-mozhlivistyu-informacijjno-kompyu.html" target="_blank" rel="follow" title="База патентів України">Пристрій попереднього розвороту операційних елементів багатофункціональної діагностико-хірургічної робототехнічної системи операційного стола з можливістю інформаційно-комп’ютерного керування ім. ю.і. русанова</a>
Пристрій розвороту діагностичних і хірургічних елементів робототехнічної системи операційного стола з можливістю інформаційно-комп’ютерного управління ім. ю.і. русанова
Номер патенту: 72485
Опубліковано: 27.08.2012
Автор: Русанов Юрий Іванович
МПК: B25J 15/12, A61B 19/00
Мітки: системі, інформаційно-комп'ютерного, і.м, хірургічних, стола, діагностичних, пристрій, елементів, розвороту, управління, операційного, русанова, робототехнічної, можливістю, ю.і
Формула / Реферат:
Пристрій розвороту діагностичних і хірургічних елементів робототехнічної системи операційного стола з можливістю інформаційно-комп'ютерного управління, що включає вертикальний корпус хірургічного стола з можливістю зміни висоти, який закріплений в нижній його частині до підстави стола, виконаного у вигляді порожнистого циліндра із зовнішніми ребрами жорсткості і нерухомо розташований на поверхні підлоги, де також розташований пристрій...
Пристрій горизонтального розвороту функціонального елемента узд висувної системи сферичного корпуса багатофункціональної діагностико-хірургічної робототехнічної системи з можливістю інформаційно-комп’ютерного к
Номер патенту: 72487
Опубліковано: 27.08.2012
Автор: Русанов Юрий Іванович
МПК: A61B 19/00, B25J 15/12
Мітки: горизонтального, сферичного, інформаційно-комп'ютерного, робототехнічної, функціонального, висувної, системі, багатофункціональної, узд, корпуса, можливістю, елемента, розвороту, пристрій, діагностико-хірургічної
Формула / Реферат:
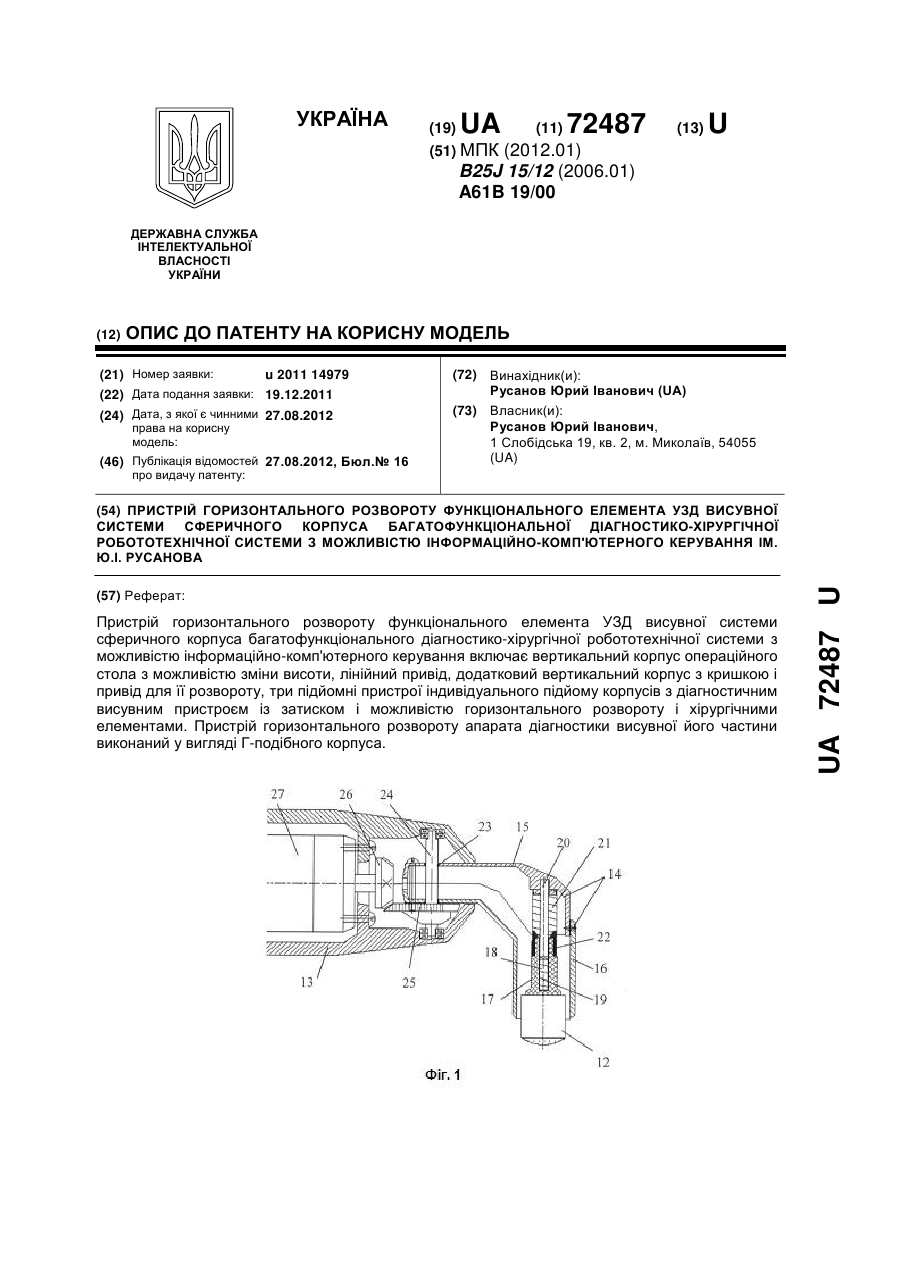
Пристрій горизонтального розвороту функціонального елемента УЗД висувної системи сферичного корпуса багатофункціонального діагностико-хірургічної робототехнічної системи з можливістю інформаційно-комп'ютерного керування, що включає вертикальний корпус операційного стола з можливістю зміни висоти, який позиційно розташований в підставі вертикального корпуса, яка закріплена на нерухомій поверхні і виконана у вигляді циліндра із зовнішніми...
Пристрій висувних елементів затиску і їх позиційне розташування усередині сферичного корпусу багатофункціональної діагностико-хірургічної робототехнічної системи з можливістю інформаційно-комп’ютерного управлін
Номер патенту: 72486
Опубліковано: 27.08.2012
Автор: Русанов Юрий Іванович
МПК: B25J 15/12, A61B 19/00
Мітки: управлін, елементів, інформаційно-комп'ютерного, корпусу, позиційне, робототехнічної, розташування, багатофункціональної, висувних, можливістю, діагностико-хірургічної, сферичного, системі, усередині, затиску, пристрій
Формула / Реферат:
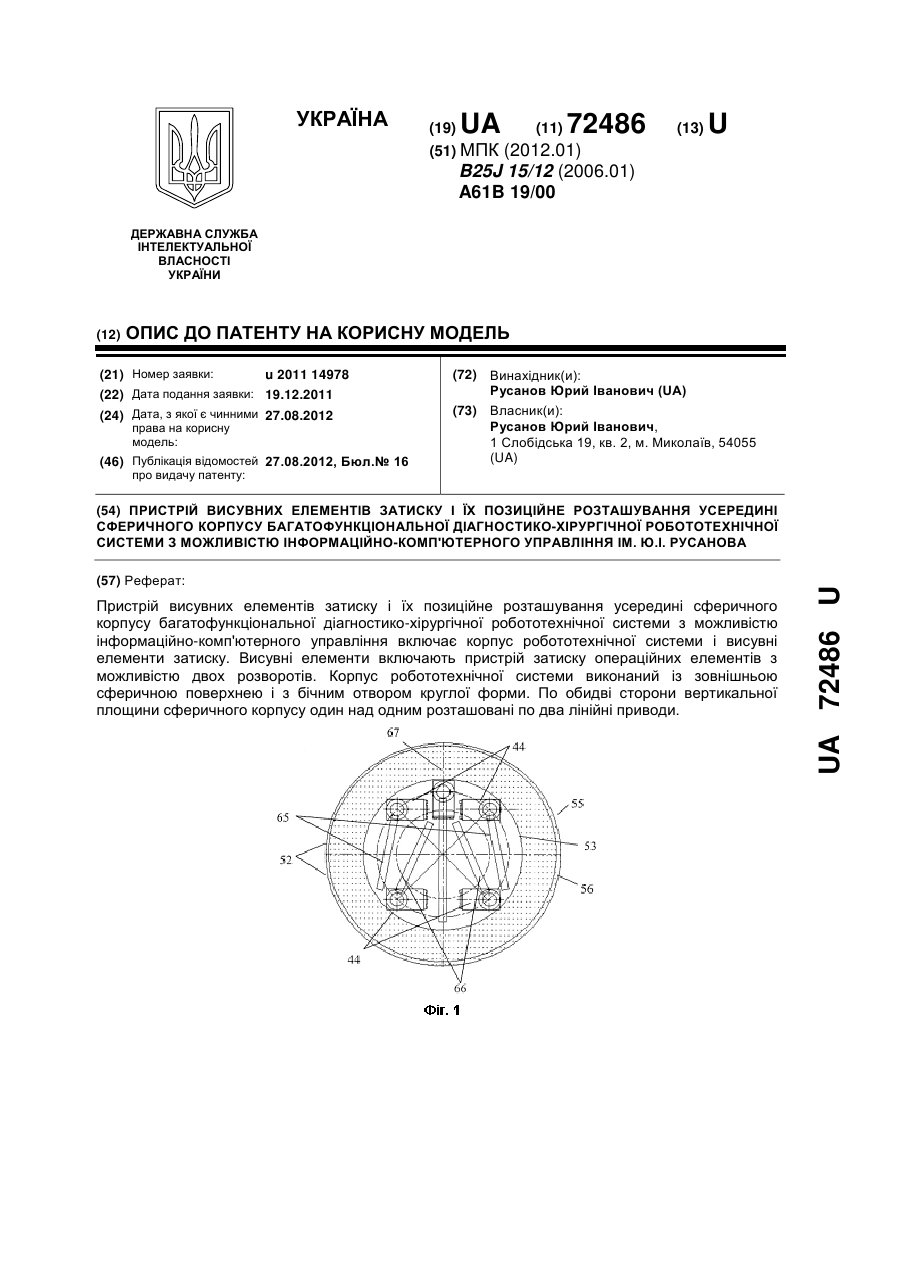
Пристрій висувних елементів затиску і їх позиційне розташування усередині сферичного корпусу багатофункціональної діагностико-хірургічної робототехнічної системи з можливістю інформаційно-комп'ютерного управління, що включає корпус робототехнічної системи і висувні елементи затиску, які включають пристрій затиску операційних елементів з можливістю двох розворотів і сполученого з пристроєм проміжного розвороту за допомогою першого приводу,...
Пристрій підйому діагностичних і хірургічних елементів шляхом розвороту в багатофункціональній робототехнічній системі операційного стола з можливістю інформаційно-комп’ютерного ерування ім. ю.і. русанова
Номер патенту: 72488
Опубліковано: 27.08.2012
Автор: Русанов Юрий Іванович
МПК: B25J 15/12, A61B 19/00
Мітки: діагностичних, ю.і, багатофункціональний, інформаційно-комп'ютерного, стола, русанова, і.м, підйому, розвороту, можливістю, хірургічних, ерування, системі, операційного, пристрій, робототехнічний, шляхом, елементів
Формула / Реферат:
Пристрій підйому діагностичних і хірургічних елементів шляхом розвороту в багатофункціональній робототехнічній системі операційного стола з можливістю інформаційно-комп'ютерного керування, що включає вертикальний корпус хірургічного стола з можливістю зміни висоти, який закріплений в нижній його частині до підстави стола, виконаного у вигляді порожнистого циліндра із зовнішніми ребрами жорсткості і нерухомо розташованого на поверхні підлоги,...
Пристрій для розвороту в горизонтальній площині багатофункціонального діагностико-хірургічного операційного стола з можливістю інформаційно-комп’ютерного управління ю.і. русанова
Номер патенту: 68659
Опубліковано: 10.04.2012
Автор: Русанов Юрий Іванович
МПК: A61B 5/00
Мітки: управління, ю.і, розвороту, площині, русанова, діагностико-хірургічного, горизонтальний, операційного, стола, інформаційно-комп'ютерного, пристрій, багатофункціонального, можливістю
Формула / Реферат:
Пристрій для розвороту в горизонтальній площині багатофункціонального діагностико-хірургічного операційного стола з можливістю інформаційно-комп'ютерного управління, що включає вертикальний корпус стола з пристроєм зміни висоти, який позиційно розташований в його підставі, який відрізняється тим, що у верхній частині вертикального корпусу, виконаного у вигляді циліндра з розташованим співвісно з ним додатковим циліндром, між якими на...