Спосіб регулювання перешкодозахищеності вимірів параметрів руху космічного апарата
Номер патенту: 72509
Опубліковано: 27.08.2012
Автори: Топольницький Павло Петрович, Ожінський Віктор Васильович, Парфенюк Василь Григорович, Фриз Сергій Петрович
Формула / Реферат
Спосіб регулювання перешкодозахищеності вимірів параметрів руху космічного апарата, який полягає в тому, що в апаратурі супутникової навігації до блока робастної обробки надходять виміри параметрів руху та від бортового комплексу управління визначені за станом магнітосфери Землі і космічної плазми значення коефіцієнта перешкодозахищеності, корельованого з рівнем перешкод, блок робастної обробки проводить згладжування параметрів руху, враховуючи рівень перешкод, та видає уточнені параметри руху КА.
Текст
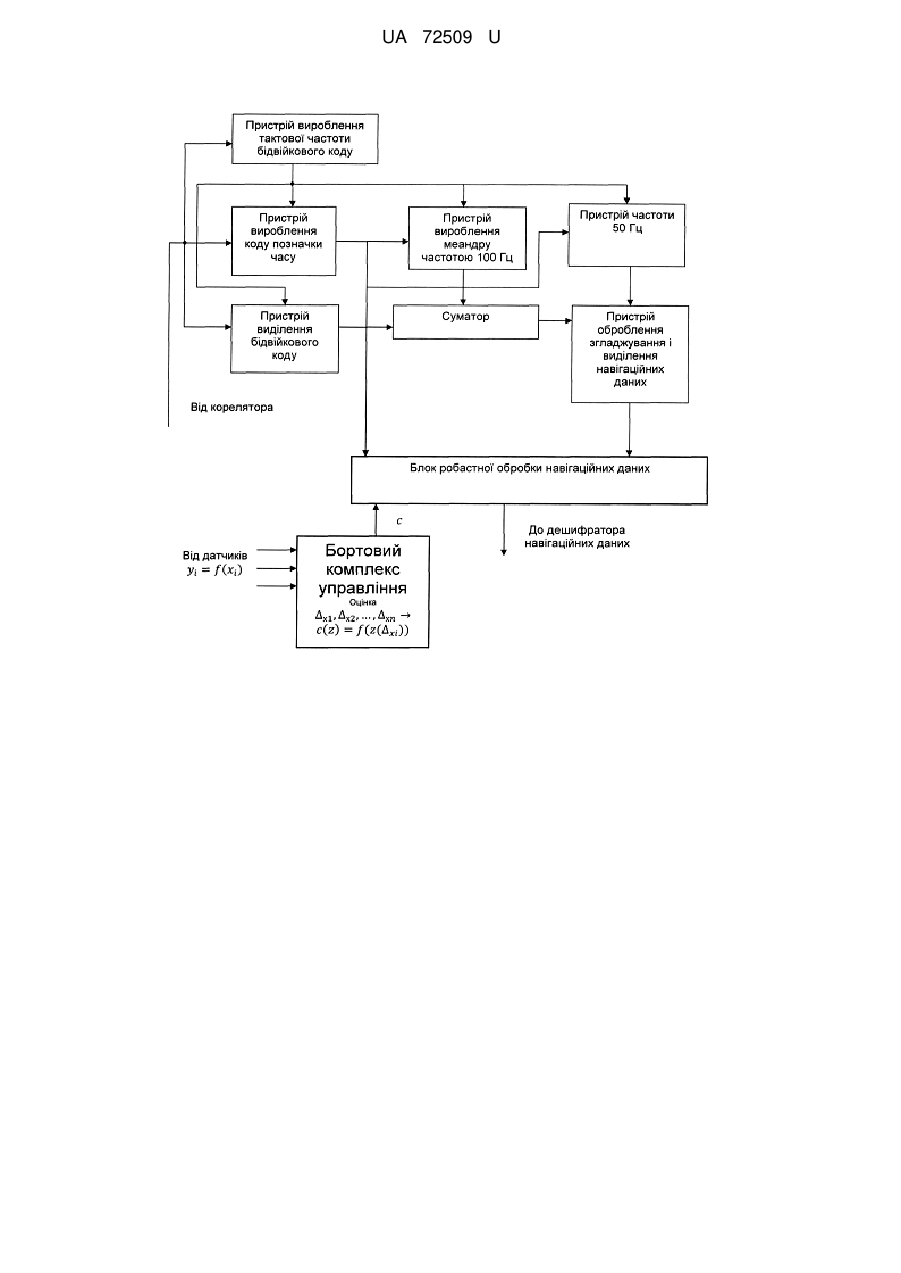
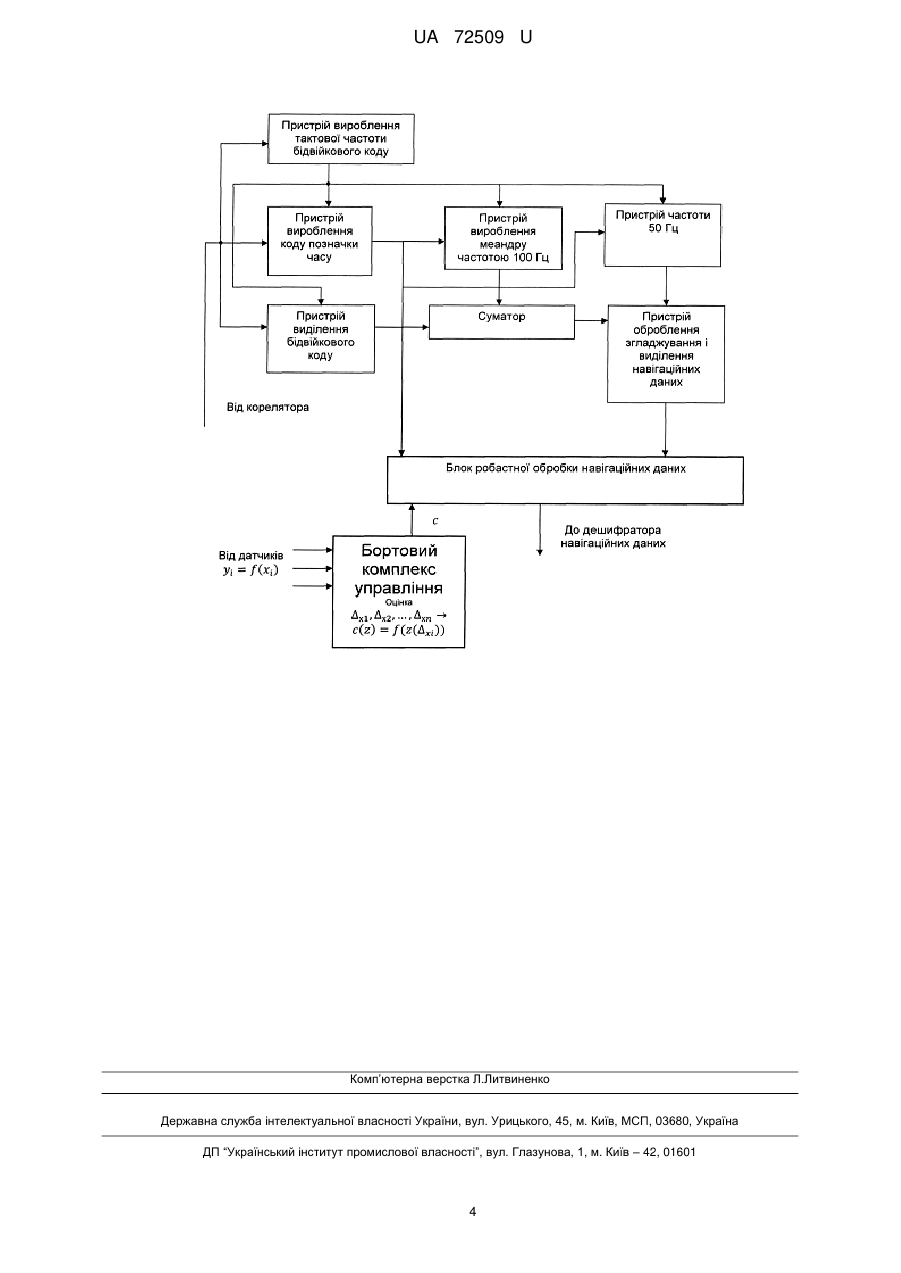
Реферат: Спосіб регулювання перешкодозахищеності вимірів параметрів руху космічного апарата, який полягає в тому, що в апаратурі супутникової навігації до блока робастної обробки надходять виміри параметрів руху та від бортового комплексу управління визначені за станом магнітосфери Землі і космічної плазми значення коефіцієнта перешкодозахищеності, корельованого з рівнем перешкод. Блок робастної обробки проводить згладжування параметрів руху, враховуючи рівень перешкод, та видає уточнені параметри руху КА. UA 72509 U (54) СПОСІБ РЕГУЛЮВАННЯ ПЕРЕШКОДОЗАХИЩЕНОСТІ ВИМІРІВ ПАРАМЕТРІВ РУХУ КОСМІЧНОГО АПАРАТА UA 72509 U UA 72509 U 5 10 15 20 25 Корисна модель належить до галузі навігаційного забезпечення управління космічними апаратами, зокрема, до підсистем навігаційного забезпечення польоту космічних апаратів (КА) та може бути використана в навігаційних системах вітчизняних космічних апаратів, що працюють в умовах однопунктної технології, для роботи бортових комплексів управління КА та апаратури корисного навантаження [1]. Відомі способи отримання даних про параметри руху використовують дані отримані з апаратури автономної супутникової навігації. Апаратурою супутникової навігації є GPS/ГЛОНАСС приймач, встановлений на борту КА, який, приймаючи спеціальні сигнали навігаційних супутників, розраховує параметри руху КА [2, 3]. Недоліком відомих способів, вибраних як прототип [3] є те, що значення коефіцієнта, який характеризує рівень перешкодозахищеності статистичної процедури обробки, є статичним та не враховує динаміки зміни рівня перешкод, що призводить до зниження точності визначення параметрів руху КА при коливаннях рівня перешкод. У основу корисної моделі поставлено задачу створити спосіб регулювання перешкодозахищеності вимірів параметрів руху КА, який шляхом використання інформації про стан магнітосфери Землі та стан космічної плазми дав можливість забезпечити динамічне регулювання перешкодозахищеності та високу точність визначення параметрів руху КА, нечутливих до малих відхилень, викликаних випадковими завадами. Для вирішення поставленої задачі у способі регулювання перешкодозахищеності вимірів параметрів руху КА, який полягає в тому, що в апаратурі супутникової навігації до блока робастної обробки [3] надходять виміри параметрів руху та від бортового комплексу управління визначені за станом магнітосфери Землі і космічної плазми значення коефіцієнта перешкодозахищеності, корельованого з рівнем перешкод. Блок робастної обробки проводить згладжування параметрів руху, враховуючи рівень перешкод, та видає уточнені параметри руху КА. Суть запропонованої корисної моделі полягає у наступному: Навігаційний приймач в складі апаратури автономної супутникової навігації КА приймає сигнали із навігаційних КА, обробляє їх та обчислює параметри руху КА у Гринвіцькій системі координат x i , y, z, Vx , Vy , Vz - координати i 30 35 40 45 50 55 60 i i та складові вектора швидкості, прив'язані до секундної мітки часу. Якісній роботі навігаційної апаратури КА перешкоджають ряд факторів, через які виникають похибки визначення параметрів руху, розглянемо якісний характер похибок: - ефемеридні похибки, пов'язані з неточністю визначення параметрів орбіт навігаційних супутників, а також непередбачуваним зміщенням параметрів супутників на орбіті через різні випадкові фактори; - іоносферні похибки зумовлюються проходженням електромагнітного сигналу на трасі «навігаційний супутник-споживач»; - похибки за рахунок шумів пов'язані з якістю технічних рішень, закладених в апаратуру споживача; - похибки зумовлені завадами, один з найбільш значущих видів похибок, вони бувають природними та штучно створеними; - похибки через багатопроменеве поширення; - похибки частотно-часового забезпечення. При розрахунку координат використовують ряд методів: - псевдодалекомірний метод розрахунку; - ітеративний метод розрахунку; - диференціальний метод розрахунку. Дані методи частково враховують різноманітні похибки, але на практиці значне зниження точності відбувається за рахунок перешкод. Значні відхилення від реальних значень відкидаються за рахунок фільтрування за правилом 3. Незначні ж відхилення при припущенні щодо нормального розподілу похибок погіршують точність визначення параметрів руху КА. Одним з головних елементів апаратури супутникової навігації є навігаційний обчислювач, у якому розв'язуються задачі первинного та вторинного оброблення навігаційної інформації, що надходить від навігаційних КА, а також здійснює керування потоками інформації між складовими апаратури супутникової інформації. Навігаційний обчислювач фізично поділяється на сигнальний і цифровий процесори. Сигнальний процесор працює з сигналами під час первинного оброблення інформації. Цифровий процесор виконує обчислювальні процедури, передбачені алгоритмами навігаційних визначень. За принципом дії - це обчислювальна машина, що працює в реальному часі і тому може реалізовувати додатково робастні процедури. Схема роботи навігаційного обчислювача з блоком робастної обробки та регулюванням перешкодозахищеності наведена на кресленні. 1 UA 72509 U Найпоширенішим способом згладжування результатів спостереження є метод найменших квадратів. Нехай ми маємо n вимірів координати x x в1 x вn , для р оцінок координати x1 x p і вони пов'язані співвідношенням [3, 4] p xi x j ui ij (1) j1 5 , де ij - певні відомі коефіцієнти, а ui - незалежні випадкові величини, які мають приблизно однакові функції розподілу. В матричній формі x A X u . (2) В класичній постановці задача зводиться до мінімізації суми квадратів n i1 xi 2 ij x j min j1 . p (3) Або, що еквівалентно, до вирішення системи p рівнянь, отриманих диференціюванням виразу (3): n i1 10 15 xi ij x j x j 0 j1 . p (4) Але такий підхід має недолік, відомо, що викиди, викликані наявністю у розподілів, які описують похибки вимірів, більш важких в порівнянні з нормальним розподілом хвостів чи просто великими помилками результатів вимірювань дуже сильно впливають на оцінку методом найменших квадратів. Тому в [3] була запропонована обробка вимірів за робастною процедурою, мінімізуючи менш швидко зростаючу функцію - функцію від залишків [4, 5]: n i1 xi 2 ij x j min j1 p (5) або розв'язати систему n i1 xi ij x j xk 0, k 1 , p , j1 , p (6) 1 2 x при x c; де x 2 . c x 1 c 2 при x c 2 20 25 30 Розв'язання системи (6) проводиться, використовуючи стандартні ітераційні процедури, ураховуючи характеристики обчислювальних можливостей апаратури супутникової навігації. Константа с визначає ступінь перешкодостійкості. Оптимальні значення c знаходяться в інтервалі [,2], де - стандартне відхилення спостережень. Визначення коефіцієнта перешкодозахищеності пропонується здійснювати наступним чином. Для забезпечення функціонування космічних апаратів бортовий забезпечувальний комплекс містить в своєму складі набір вимірювальних приладів: - магнітометри; - датчики параметрів різноманітних частинок (нейтральних, заряджених) космічної плазми; - датчики електричного поля. В процесі розробки космічних апаратів (космічних систем) здійснюється визначення функціональної залежності між відхиленнями показань датчиків від нормального (розрахункового) та рівня перешкод відповідно до [4-6]. z f x1, x2, , xn , (7) де z()- функція рівня перешкод, xi - відхилення показань датчиків. Далі задається функціональна залежність(найчастіше лінійна): (8) cz f z ,2 . 2 UA 72509 U В процесі льотної експлуатації бортовий комплекс управління проводить обробку вимірювань з датчиків yi f xi , (9) 5 10 15 статистично оцінює величини x1, x2 ,, xn та значення z(), за яким визначає ступінь перешкодостійкості - константу c (як значення функції на момент оцінки), та видає її значення до апаратури супутникової навігації для обробки. Джерела інформації: 1. Загорулько А. Н. Особенности программных способов управления космическими аппаратами при однопунктной технологии. // Моделювання та інформаційні технології: Збірник наукових праць. X.: НАНУ, Інститут проблем моделювання в енергетиці імені Г.Є. Пухова. 2005. - Вип. 32. - С. 80-87. 2. Бабак В. П., Конін В. В., Харченко В. П. Супутникова радіонавігація. - К.: Техніка, 2004. 328 с. 3. Спосіб підвищення точності визначення параметрів руху космічного апарата В.В. Ожінський, О. М. Загорулько, В.Г. Парфенюк, П.П. Топольницький (Україна). - № u201008384. Заявлено 05.07.10. Опубл. 10.01.11. Бюл. № 1. - 6 с. 4. Устойчивые статистические методы оценки данных /Пер. с англ. Ю.И. Малахова; Под ред. Н.Г. Волкова. - М.: Машиностроение, 1984. - 232 с. 5. Хьюбер Дж. П. Робастность в статистике: Пер. с. англ. - М.: Мир, 1984. - 384 с., ил. 6. Боровков А. А. Математическая статистика. - М.: Наука, 1984. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 Спосіб регулювання перешкодозахищеності вимірів параметрів руху космічного апарата, який полягає в тому, що в апаратурі супутникової навігації до блока робастної обробки надходять виміри параметрів руху та від бортового комплексу управління визначені за станом магнітосфери Землі і космічної плазми значення коефіцієнта перешкодозахищеності, корельованого з рівнем перешкод, блок робастної обробки проводить згладжування параметрів руху, враховуючи рівень перешкод, та видає уточнені параметри руху КА. 3 UA 72509 U Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlof jamming resistance of measurements of spacecraft movement parameters
Автори англійськоюOzhinskyi Viktor Vasyliovych, Parfeniuk Vasyl Hryhorovych, Topolnytskyi Pavlo Petrovych, Fryz Serhii Petrovych
Назва патенту російськоюСпособ регулирования помехозащищенности измерений параметров движения космического аппарата
Автори російськоюОжинский Виктор Васильевич, Парфенюк Василий Григорьевич, Топольницкий Павел Петрович, Фриз Сергей Петрович
МПК / Мітки
МПК: G05B 17/00
Мітки: спосіб, перешкодозахищеності, руху, регулювання, параметрів, космічного, апарата, вимірів
Код посилання
<a href="https://ua.patents.su/6-72509-sposib-regulyuvannya-pereshkodozakhishhenosti-vimiriv-parametriv-rukhu-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання перешкодозахищеності вимірів параметрів руху космічного апарата</a>
Спосіб підвищення точності визначення параметрів руху космічного апарата
Номер патенту: 56376
Опубліковано: 10.01.2011
Автори: Парфенюк Василь Григорович, Топольницький Павло Петрович, Ожінський Віктор Васильович, Загорулько Олександр Миколайович
МПК: G05B 17/00
Мітки: руху, точності, параметрів, визначення, спосіб, підвищення, космічного, апарата
Формула / Реферат:
Спосіб підвищення точності визначення параметрів руху космічного апарата, який відрізняється тим, що в апаратурі супутникової навігації дані із навігаційного обчислювача надходять до блока робастної обробки, який проводить їх згладжування з використанням завадостійких (робастних) статистичних процедур та видає уточнені параметри руху космічного апарата.
Спосіб регулювання параметрів кутового руху ракети-носія космічного апарата
Номер патенту: 83861
Опубліковано: 26.08.2008
Автори: Манойленко Олександр Олексійович, Шептун Юрій Дмитрович
МПК: G05B 15/00, B64G 1/24
Мітки: руху, ракети-носія, космічного, спосіб, параметрів, кутового, апарата, регулювання
Формула / Реферат:
Спосіб регулювання параметрів кутового руху ракети-носія космічного апарата шляхом вимірювання кутових швидкостей та кутів тангажа, рискання і крену, порівняння виміряних значень з заданими, формування основних сигналів керування ракетою згідно з помилками регулювання, який відрізняється тим, що на кожному такті керування ракетою з моменту відключення рухомої установки і до моменту відділення космічного апарата формують в каналах тангажа і...
Спосіб перевірки вірогідності вимірювання параметрів руху космічного апарата
Номер патенту: 61315
Опубліковано: 11.07.2011
Автори: Парфенюк Василь Григорович, Петрожалко Володимир Володимирович, Фриз Сергій Петрович, Ожінський Віктор Васильович
МПК: G05B 17/00
Мітки: параметрів, перевірки, апарата, спосіб, вірогідності, вимірювання, космічного, руху
Формула / Реферат:
Спосіб перевірки вірогідності вимірювання параметрів руху космічного апарата, який полягає в тому, що в обчислювальній машині бортового комплексу керування дані з апаратури супутникової навігації (координати та швидкості) переводяться у Кеплерові елементи орбіти та порівнюються із прогнозованими...
Спосіб визначення поточних навігаційних параметрів космічного апарата
Номер патенту: 32157
Опубліковано: 12.05.2008
Автори: Загорулько Олександр Миколайович, Богом'я Володимир Іванович
МПК: B64G 1/24
Мітки: визначення, параметрів, поточних, навігаційних, спосіб, апарата, космічного
Формула / Реферат:
Спосіб визначення поточних навігаційних параметрів космічного апарата, який полягає в тому, що за допомогою наземних оптичних вимірювальних систем проводять спостереження та визначення поточних навігаційних параметрів космічного апарата (КА) на тіньовій (неосвітленій) ділянці орбіти за відсутності відображеного від конструкції КА сонячного світла, який відрізняється тим, що для освітлювання використовують штучне джерело випромінювання, яке...
Система стабілізації кутового руху космічного апарата
Номер патенту: 35087
Опубліковано: 26.08.2008
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Пхайко Ірина Вікторівна
МПК: B64G 1/24
Мітки: руху, кутового, космічного, стабілізації, система, апарата
Формула / Реферат:
Система стабілізації кутового руху космічного апарата, що складається з датчика відхилення кута тангажа і датчика кутової швидкості, виходи яких послідовно через підсилювач-перетворювач, рульові приводи з потенціометром у зворотному зв'язку підключені до виконавчого органа, яка відрізняється тим, що в неї введений нечіткий регулятор, що містить блок формування і розпізнавання образів, вхід якого з'єднаний з виходами датчиків відхилення кута...
Попередній патент: Стрічковий конвеєр
Наступний патент: Спосіб очищення і утилізації теплоти доменного газу
Випадковий патент: Спосіб прогнозування швидкості рентгенологічного прогресування раннього ревматоїдного артриту