Механізм переміщення мостового крана

Формула / Реферат
1. Механізм переміщення мостового крана, що включає холості і привідні ходові колеса, сполучені через муфти і трансмісійні вали з вихідним валом редуктора, що складається з вихідної і вхідної частин, остання з яких містить принаймні одноступінчату передачу, утворену центральним циліндровим зубчастим колесом, встановленим на вихідному валу редуктора і кінематично пов'язаним з проміжним валом, на який насаджено зубчасте колесо, що має кінематичний зв'язок з вхідним електродвигуном, забезпеченим гальмівним шківом і гальмом, який відрізняється тим, що вихідна частина редуктора утворена конічними зубчастими колесами, кожне з яких встановлено на вихідному, виконаному складеним, валу редуктора з можливістю взаємодії з центральним циліндровим зубчастим колесом через водило, палець і сателіти.
2. Механізм переміщення по п. 1 відрізняється тим, що ширина коліс між їх ребордами перевищує ширину підкранової рейки, по якій вони переміщуються, на 5-10 мм.
Текст
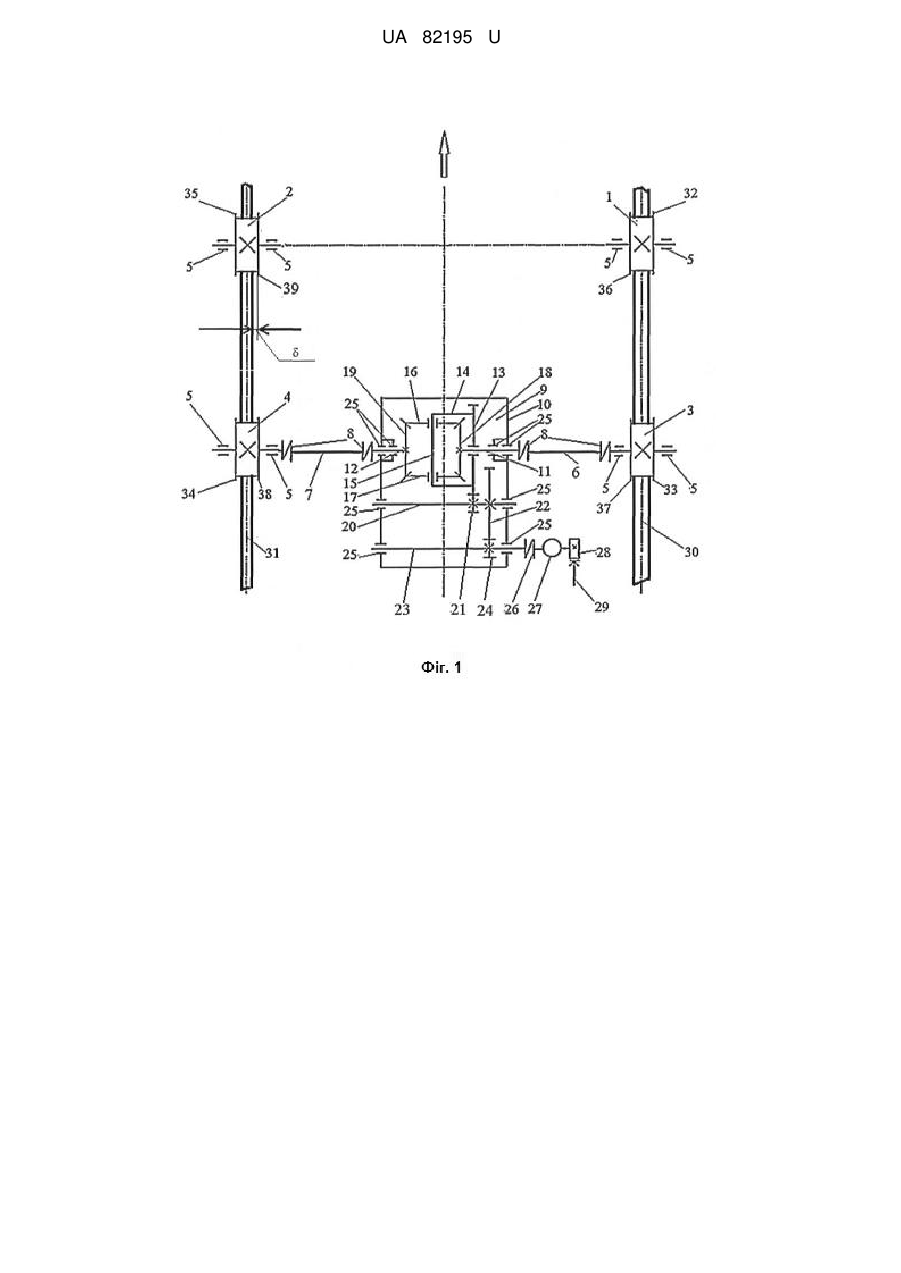
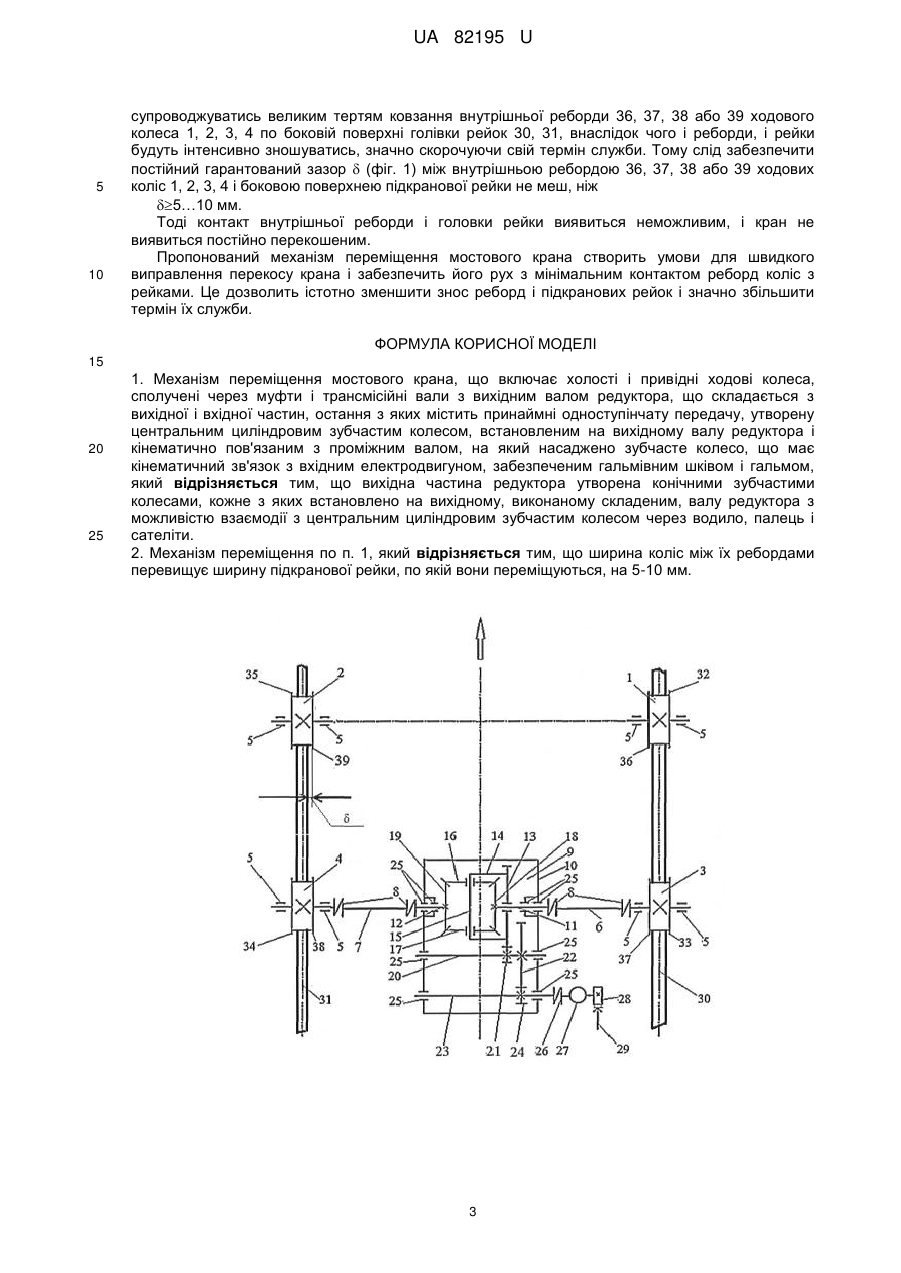
Реферат: UA 82195 U UA 82195 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вантажопідйомного устаткування і може бути використана на мостових вантажопідйомних чотириколісних кранах замість існуючих механізмів переміщення. У відомій конструкції механізму переміщення чотириколісних мостових кранів з роздільним приводом ходових коліс для кожного приводного ходового колеса є індивідуальний електродвигун (Шабашов А.П., Лысяков А.Г. Мостовые краны общего назначения.-5-е изд., перераб. и доп. - М.: Машиностроение, 304 с., ил., стр. 156). Хоча схема механізму з роздільним приводом вимагає наявності двох двигунів, двох гальм і двох редукторів, вона найбільш дешева, має малу масу і проста у виготовленні. На таких механізмах переміщення застосовують циліндрові ходові колеса. Досвід експлуатації показав, що основною причиною підвищеного зносу коліс кранів з роздільним механізмом переміщення крана є непаралельність осей підкранових рейок. На жаль, навіть ідеальна установка рейок не усуває перекосу моста крана під час руху. Це викликається неспівпаданням характеристик привідних двигунів і переважно нецентральним положенням вантажу, що транспортується. Зсув вантажу від центра крана збільшує навантаження на відповідний двигун і він знижує швидкість свого обертання. Обертання лівого і правого двигунів з різними кутовими швидкостями веде до забігу однієї сторони крана відносно іншої. При русі крана з перекосом реборди циліндрових ходових коліс постійно труться об рейки. Це веде до інтенсивного зносу реборд коліс і бічних поверхонь рейок, що сильно скорочує термін служби ходових коліс кранів, а також підкранових рейок (Детали машини подъѐмно-транспортные машины. (Межведомственный республиканский научно технический сборник № 5. - К., 1967. - С. 160-168). Відома конструкція центрального механізму переміщення вантажопідйомного мостового крана (Шабашов А.П., Лысяков А.Г. Мостовые краны общего назначения.-5-е изд., перераб. и доп. - М.: Машиностроение, 304 с., ил., стр. 156). Такі механізми складаються з непривідної частини - холостих ходових коліс і привідної частини - привідних ходових коліс, передавального пристрою, електродвигуна і гальма. У привідній частині механізму з центральним приводом використовується один двигун і один передавальний пристрій, встановлений на головній балці моста крана в його центральній частині. На привідні ходові колеса, які встановлені на кінцевих балках моста крана, обертання передається через трансмісійний вал, що складається з двох половин. Дві половини трансмісійного вала з'єднуються муфтами з валами ходових коліс і з тихохідним валом редуктора, який встановлюється в середині прольоту моста. Як передавальний пристрій використовуються центральні циліндрові редуктори - велика група редукторів, що характеризується вживаним в них зачепленням циліндровими зубчастими передачами, кожне зубчасте колесо яких має свій, строго фіксований відносно корпусу редуктора, центр обертання. Ці механізми вимагають ходових коліс з конічним ободом. При цьому менший конус розташовується з зовнішньої сторони крана. Перевагою таких механізмів є те, що при ходових колесах з конічним ободом забіг однієї сторони крана відносно іншої викликає кочення відстаючого ходового колеса по більшому діаметру, збільшення швидкості його переміщення і автоматичне зменшення перекосу. Це збільшує термін служби конічних коліс в порівнянні з циліндровими. Недоліком прототипу є те, що внаслідок високої контактної напруги, конічна поверхня швидко зношується, і в роботу включаються реборди аналогічно циліндровим колесам. Досвід експлуатації показує, що термін служби ходових коліс кранів при відомих конструкціях механізмів переміщення мостового крана дуже малий (частенько довговічність коліс кранів при інтенсивному режимі експлуатації обчислюється тижнями). В основу корисної моделі поставлено задачу створення центрального механізму переміщення мостового крана, в якому нова конструкція передачі між привідним електродвигуном і трансмісійним валом, передаючим обертання привідним ходовим колесам, дозволить істотно понизити тривалість контакту реборди привідного ходового колеса крана з голівкою рейки для усунення перекосу моста крана, що дозволить істотно збільшити довговічність ходових коліс. Для вирішення поставленої задачі в механізмі переміщення мостового крана, який включає холості і привідні ходові колеса, сполучені через муфти і трансмісійні вали з вихідним валом редуктора, що складається з вихідної і вхідної частин, остання з яких містить принаймні одноступінчату передачу, утворену центральним циліндровим зубчастим колесом, встановленим на вихідному валу редуктора і кінематично пов'язаним з проміжним валом, на який насаджено зубчасте колесо, що має кінематичний зв'язок з вхідним електродвигуном, забезпеченим гальмівним шківом і гальмом, відповідно до корисної моделі, вихідна частина редуктора утворена конічними зубчастими колесами, кожне з яких встановлено на вихідному, 1 UA 82195 U 5 10 15 20 25 30 35 40 45 50 55 60 виконаному складеним, валу редуктора з можливістю взаємодії з центральним циліндровим зубчастим колесом через водило, палець і сателіти. При цьому ширина коліс між їх ребордами перевищує ширину підкранової рейки, по якій вони переміщуються, на 5-10 мм. У пропонованому пристрої істотне збільшення довговічності ходових коліс мостових кранів забезпечується за рахунок зниження тривалості контакту реборди привідного ходового колеса крана з голівкою рейки для усунення перекосу моста крана. Суть пристрою пояснюється кресленням, де на фіг. 1 зображена кінематична схема пропонованого механізму пересування мостового крана. Пропонований механізм складається з холостих 1, 2 та привідних коліс 3 і 4 з циліндричним ободом, встановлених в підшипниках 5, трансмісійних валів 6, 7 з муфтами 8, редуктора 9, до складу якого входять корпус 10, вихідні вали 11, 12, циліндричне зубчасте колесо 13, водило 14 з пальцем 15, сателіти 16, 17, вихідні конічні зубчасті колеса 18, 19, проміжний вал 20, шестірня 21, зубчасте колесо 22, вхідний вал 23, шестірня 24, підшипники 25, муфти 26 електродвигуна 27 гальмівного шківа 28, гальма 29 підкранових рейок 30, 31 зовнішніх реборд 32, 33, 34, 35 і внутрішніх реборд 36, 37, 38, 39. Всі вали обертаються в підшипниках 25. Редуктор 9 містить: вхідний вал 23, на який насаджена шестірня 24, і який, за допомогою муфти 26, сполучений з електродвигуном 27 гальмівним шківом 28 і гальмом 29; проміжний вал 20 з насадженими на нього шестірнею 21 і зубчастим колесом 22; вихідний вал 11, одним своїм кінцем сполучений з муфтою 8, а на іншій його кінець насаджено конічне колесо 18; вихідний вал 12, одним своїм кінцем сполучений з муфтою 8, а на іншій його кінець насаджено конічне колесо 19. Конічні колеса 18 і 19 через водило 14, палець 15 і сателіти 16 і 17 взаємодіють з центральним циліндровим колесом 13, насадженим на вихідний вал 11, що знаходиться в зачепленні з шестірнею 21, насадженою на проміжний вал 20, на який насаджене друге центральне циліндрове колесо 22, що знаходиться в зачепленні з шестірнею 24, встановленою на вхідному валу 23 редуктора 9, сполученого через муфту 26 з електродвигуном 27, гальмівним шківом 29 і гальмом 29. Розроблений механізм переміщення мостового крана працює таким чином. При включенні електродвигуна 27 гальмо 29 розмикається і звільняє гальмівний шків 28. Електродвигун починає обертатися і через муфту 26 передає обертання вхідному валу 23 і шестірні 24, насадженій на цей вал, редуктора 9. Шестірня 24 обертає зчеплене з нею зубчасте колесо 22, насаджене на проміжний вал 20, яке також починає обертатися саме і обертати насаджену на нього шестірню 21. Шестірня 21 передає обертання зчепленому з нею зубчастому колесу 13. З колеса 13 обертання передається водилі 14, пальцю 15, сателітам 16, 17, конічним зубчастим колесам 18, 19 і вихідним валам 11, 12. Потім обертання передається через муфти 8, проміжні вали 6, 7 привідним колесам 3 і 4. Вали редуктора обертаються в підшипниках 25, встановлених у корпусі 10 редуктора 9, а привідні колеса 3, 4 і холості колеса 1, 2 обертаються в підшипниках 5, встановлених в торцевих балках крана (на схемі не показаних). При русі крана без перекосу привідні колеса 3 і 4 відчувають рівні опори своєму руху і обертаються з однаковими швидкостями, так як в цьому випадку сателіти 16, 17 нерухомі щодо пальця 15. Якщо кран рухається з перекосом, наприклад вліво, в напрямі, показаному стрілкою, праві привідне та холосте ходові колеса 1, 3 будуть рухатися з випередженням до того часу, поки зовнішня реборда 32 колеса 1 не торкнеться головки рейки 30. Після цього опір обертанню коліс 1, 3 різко збільшиться, а швидкість їх обертання впаде. Внаслідок цього швидкість обертання вихідного конічного колеса 18, зв'язаного з привідним колесом 3 за допомогою вихідного вала 11, муфт 8 та проміжного вала 6, також зменшиться, а сателіти 16 та 17 почнуть обертатись навколо пальця 15 і примусять вихідне конічне колесо 19, вал 12, проміжний вал 7, муфти 8 і зв'язане з ними привідне колесо 4 та холосте колесо 2 збільшити швидкість обертання. Це виявиться можливим, так як зовнішні реборди 34 і 35 коліс4 і 2 будуть відходити від головки рейки 31. Отже, забігла вперед права сторона крана зменшить швидкість свого руху, а відстала ліва сторона крана збільшить швидкість свого руху в таке ж число раз. В результаті цього перекіс крана буде усунутий, і він почне рухатися без тертя реборд коліс об головки підкранових рейок. При новому перекосі зазначений процес вирівнювання крана повториться. Але, якщо в контакт з рейкою вступить внутрішня реборда 36, 37, 38 або 39 ходових коліс 1,2, 3, 4, то кран перекосить, і далі він буде рухатись постійно перекошеним. Цей процес буде 2 UA 82195 U 5 10 супроводжуватись великим тертям ковзання внутрішньої реборди 36, 37, 38 або 39 ходового колеса 1, 2, 3, 4 по боковій поверхні голівки рейок 30, 31, внаслідок чого і реборди, і рейки будуть інтенсивно зношуватись, значно скорочуючи свій термін служби. Тому слід забезпечити постійний гарантований зазор (фіг. 1) між внутрішньою ребордою 36, 37, 38 або 39 ходових коліс 1, 2, 3, 4 і боковою поверхнею підкранової рейки не меш, ніж 5…10 мм. Тоді контакт внутрішньої реборди і головки рейки виявиться неможливим, і кран не виявиться постійно перекошеним. Пропонований механізм переміщення мостового крана створить умови для швидкого виправлення перекосу крана і забезпечить його рух з мінімальним контактом реборд коліс з рейками. Це дозволить істотно зменшити знос реборд і підкранових рейок і значно збільшити термін їх служби. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 1. Механізм переміщення мостового крана, що включає холості і привідні ходові колеса, сполучені через муфти і трансмісійні вали з вихідним валом редуктора, що складається з вихідної і вхідної частин, остання з яких містить принаймні одноступінчату передачу, утворену центральним циліндровим зубчастим колесом, встановленим на вихідному валу редуктора і кінематично пов'язаним з проміжним валом, на який насаджено зубчасте колесо, що має кінематичний зв'язок з вхідним електродвигуном, забезпеченим гальмівним шківом і гальмом, який відрізняється тим, що вихідна частина редуктора утворена конічними зубчастими колесами, кожне з яких встановлено на вихідному, виконаному складеним, валу редуктора з можливістю взаємодії з центральним циліндровим зубчастим колесом через водило, палець і сателіти. 2. Механізм переміщення по п. 1, який відрізняється тим, що ширина коліс між їх ребордами перевищує ширину підкранової рейки, по якій вони переміщуються, на 5-10 мм. 3 UA 82195 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanism for moving bridge crane
Автори англійськоюSchehlov Oleh Mykhailovych
Назва патенту російськоюМеханизм перемещения мостового крана
Автори російськоюЩеглов Олег Михайлович
МПК / Мітки
МПК: B66C 9/00
Мітки: переміщення, механізм, мостового, крана
Код посилання
<a href="https://ua.patents.su/6-82195-mekhanizm-peremishhennya-mostovogo-krana.html" target="_blank" rel="follow" title="База патентів України">Механізм переміщення мостового крана</a>
Механізм підйому мостового крана

Номер патенту: 62308
Опубліковано: 15.12.2003
Автори: Шебанов Ігор Володимирович, Шебанова Тетяна Володимировна
МПК: B66C 17/00
Мітки: механізм, підйому, мостового, крана
Формула / Реферат:
1. Механізм підйому мостового крана, який має вантажний барабан, крановий редуктор, електродвигуни основної та установочної швидкості підйому, вали, гальма, який відрізняється тим, що прохідний вал редуктора в середній частині обладнаний хрестовиною з цапфами, які сполучені з сателітами обертання.2. Механізм за п. 1, який відрізняється тим, що сателіти обертання кінематично зв'язані з двома зубчастими конічними колесами, при цьому...
Багатошвидкісний механізм піднімання крана мостового типу
Номер патенту: 41845
Опубліковано: 10.06.2009
Автори: Кияшко Володимир Тимофійович, Скворцов Максим Миколайович, Веремчук Інна Володимирівна
МПК: B66C 17/00
Мітки: піднімання, типу, багатошвидкісний, механізм, крана, мостового
Формула / Реферат:
Багатошвидкісний механізм підйому та опускання вантажу крана мостового типу, що містить привід, вантажний візок та канат, який відрізняється тим, що на кінцевих балках стаціонарно встановлені щонайменше два механізми піднімання та опускання вантажу, на барабанах яких закріплений канат, зв'язаний із вантажозахоплюючим пристроєм через напрямні ролики, встановлені на візках з індивідуальними механізмами пересування для зміни відстані між ними та...
Вузол направляючого ролика ходової частини мостового крана

Номер патенту: 26427
Опубліковано: 25.09.2007
Автори: Карташов Олексій Вікторович, Кияшко Володимир Тимофійович, Учитель Олександр Давидович, Григорьєва Вікторія Георгієвна
МПК: B66C 9/00
Мітки: вузол, ходової, мостового, ролика, направляючого, крана, частини
Формула / Реферат:
1. Вузол направляючого ролика ходової частини мостового крана, що містить ролик, важіль, шарнірно сполучений з жорстко прикріпленим до кінцевої балки кронштейном, підпружинений елемент і напрямні переміщення ролика, який відрізняється тим, що направляючий ролик сферичної форми зовнішньої поверхні шарнірно прикріплений до нижнього кінця важеля, який в своїй геометричній середині шарнірно сполучений з кронштейном, жорстко встановленим на...
Механізм пересування крана
Номер патенту: 2292
Опубліковано: 26.12.1994
Автори: Бик Аркадій Рувимович, Белов Олександр Іванович, Сербаєв Петро Миколайович
МПК: B66C 9/00
Мітки: крана, механізм, пересування
Формула / Реферат:
Механизм передвижения крана, со держащий балансирную тележку, ходовое колесо, установленное в последней на промежуточном валу, цилиндрический редуктор, волновой редуктор, выполненный с двойной зубчатой муфтой, и электродвигатель, связанный с промежуточным валом ходового колеса посредством последовательно соединенных редукторов и двойной зубчатой муфтой, отличающийся тем, что он снабжен дополнительным валом, выполненным с дополнительной...
Вантажний візок мостового крана
Номер патенту: 55338
Опубліковано: 10.12.2010
Автори: Ісакова Анна Миколаївна, Михайлов Микола Олексійович, Ісаков Микола Іванович, Кашанський Дмитро Анатолійович
МПК: B66C 17/00
Мітки: мостового, візок, вантажний, крана
Формула / Реферат:
1. Вантажний візок мостового крана, що містить раму з порталом на якій установлені механізми головного і допоміжного підйому вантажозахватного органа, зв'язані з ним через канатно-блокову систему, який відрізняється тим, що вантажозахватний орган виконаний у вигляді траверси і скоби, зв'язаних між собою гнучкими елементами, крім того траверса з'єднана з механізмом головного підйому, а скоба - з механізмом допоміжного підйому через...
Попередній патент: Сферичний самоустановлювальний упорний кульковий підшипник
Наступний патент: Пакет для упаковки алкогольних і слабоалкогольних напоїв
Випадковий патент: Застосування йота-карагенану для профілактики або терапевтичного лікування риновірусної інфекції