Спосіб автоматичного регулювання технологічних параметрів
Номер патенту: 84939
Опубліковано: 11.11.2013
Автори: Олексієнко Галина Андріївна, Самедов Юсіф Фахрат огли
Формула / Реферат
Спосіб автоматичного регулювання технологічних параметрів, що включає формування керувальної дії у вигляді керувальних імпульсів максимальної потужності, визначення поточного значення похибки регулювання і вимірювання регульованої величини об'єкта, точне утримання заданого значення регульованої величини, яке здійснюють обчисленням значення основної керувальної дії з врахуванням похибки регулювання, який відрізняється тим, що поточне значення похибки регулювання запам'ятовують і порівнюють зі значенням похибки у попередньому циклі формування керувальної дії, визначають стан системи автоматичного регулювання з точки зору відхилення вихідного параметра від заданого значення чи наближення вихідного параметра до заданого значення, запам'ятовують величину максимального значення похибки регулювання і до основної керувальної дії формують додаткові як прискорюючі, так і гальмуючі імпульси в залежності від відношень поточної похибки до її максимального значення, яке було запам'ятовано раніше.
Текст
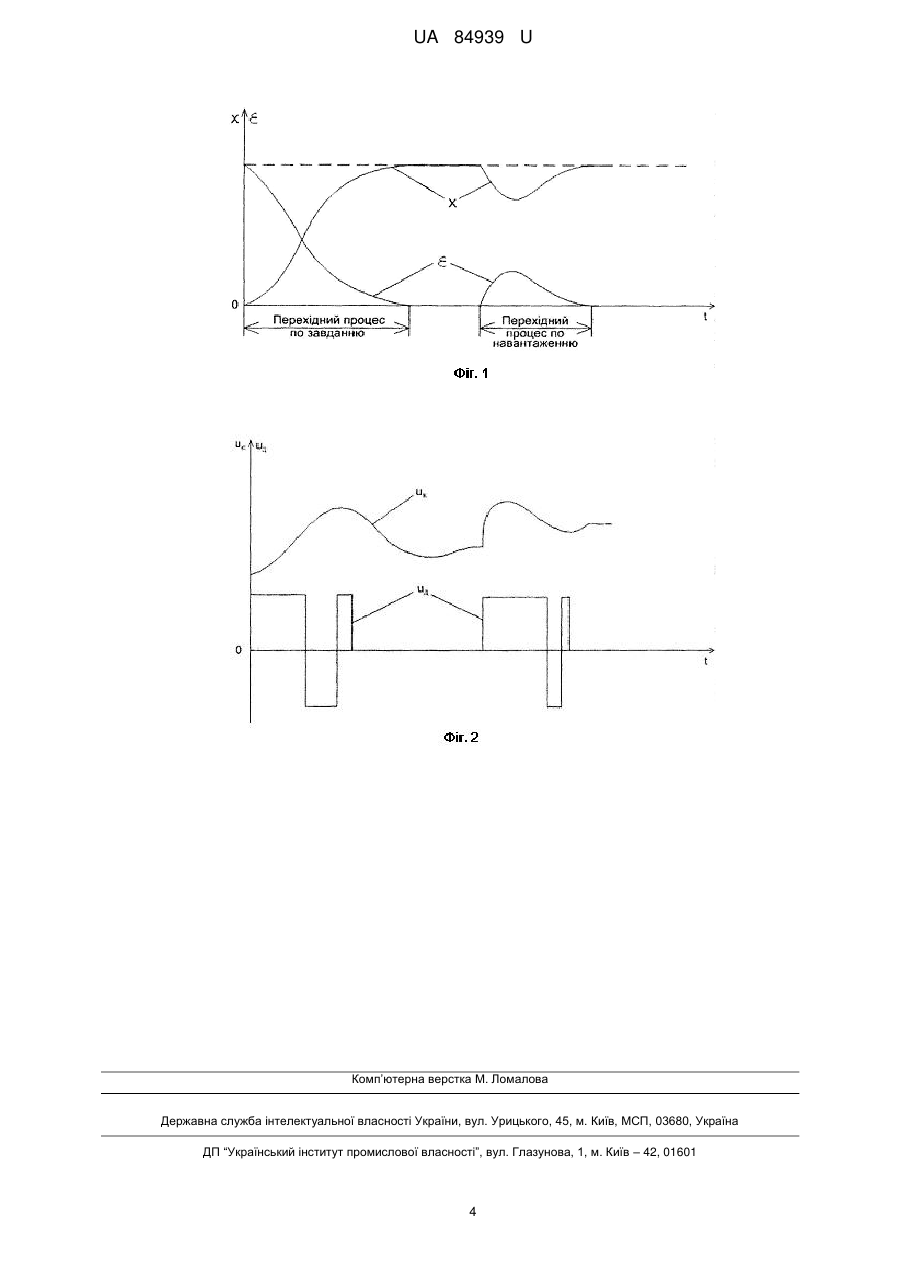
Реферат: UA 84939 U UA 84939 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області автоматичного керування технологічними об'єктами металургійної, хімічної, харчової та інших промисловостей і може бути використана для автоматичного регулювання технологічних параметрів (тиск, рівень, температура, лінійна та кутова швидкості тощо). Відомий спосіб програмного регулювання гріючої потужності, в якому формується програма зміни температури об'єкта, вимірюється температура об'єкта, визначається ступінчата нагрівальна потужність та задаються інтервали часу зміни режимів нагріву (див. патент РФ №2231821, МПК G05D 23/19, 18.10.2002). Але даний спосіб має таки недоліки: зміни режиму об'єкта заданою програмою відбуваються в моменти часу, коли температура при нагріві чи охолодженні досягають заданого значення, що приводить до відхилень температури від заданого значення внаслідок інерційності теплових об'єктів; не враховуються запізнення реакції об'єкту на керуючі дії, а також зміна динамічних властивостей об'єкта управління. Все це приводить до похибок регулювання температури технологічного об'єкта. Як найближчий аналог вибрано спосіб автоматичного регулювання технологічних параметрів, згідно з яким спочатку на об'єкт керування формують поодинокий керувальний імпульс максимальної потужності і одночасно обчислюють величину інерційного зросту температури, яку використовують для визначення моменту завершення цього імпульсу. Для точного утримання регульованого параметра на заданому значенні обчислюють і формують необхідну потужність основної керувальної дії з врахуванням властивостей об'єкта керування, поточної похибки регулювання та швидкості зміни регульованої величини (див. патент РФ №2461857 G05B 11/00 20.04.2011). Недоліком відомого способу є обмежені функціональні можливості, що пояснюється недостатньою швидкодією. Запропонований спосіб може бути використаний переважно для регулювання температури при електронагріві і зовсім не може бути застосований при регулюванні багатьох інших технологічних параметрів, де основним є безперервна корекція керуючої дії (хоча б при газовому нагріву горінням), а також складність процедури обчислення керувальних імпульсів. В основу корисної моделі поставлено задачу - удосконалення способу автоматичного регулювання технологічних параметрів шляхом формування додаткових клерувальних імпульсів простим і ефективним способом для підвищення швидкодії систем автоматичного регулювання багатьох технологічних параметрів без перерегулювання і коливань, що розширює функціональні можливості. Поставлена задача вирішується тим, що у відомому способі автоматичного регулювання технологічних параметрів, по якому здійснюють формування керувальної дії у вигляді керувальних імпульсів максимальної потужності, визначають поточне значення похибки регулювання і вимірюють регульовану величину об'єкта, точне утримання заданого значення регульованої величини здійснюють обчисленням значення основної керувальної дії з врахуванням похибки регулювання, згідно з корисною моделлю, поточне значення похибки регулювання запам'ятовують і порівнюють зі значенням похибки у попередньому циклі формування керувальної дії, визначають стан системи автоматичного регулювання з точки зору відхилення вихідного параметра від заданого значення чи наближення вихідного параметра до заданого значення, запам'ятовують величину максимального значення похибки регулювання і далі до основної керувальної дії формують додаткові як прискорюючі, так і гальмуючі імпульси в залежності від відношень поточної похибки до її максимального значення, яке було запам'ятовано раніше. Принцип розробки нового способу автоматичного регулювання технологічних параметрів (вихідної величини) базується на наступних теоретичних поясненнях. Як відомо з практики автоматичного регулювання різних технологічних параметрів переважна більшість об'єктів керування являє собою послідовне з'єднання аперіодичних ланок першого або другого порядків з певним запізненням. З теорії автоматичного керування відомо, що для найшвидшого переводу будь якого об'єкта керування з одного значення вихідної величини на інше, потрібні імпульсні (релейні) зміни керувальної дії як прискорюючого, так й гальмуючого характеру максимально можливої потужності (див. Попович М.Г., Ковальчук О.В. Теорія автоматичного керування: Підручник. - К.: Либідь, 1997, - С. 480-487). Кількість таких переключень керувальної дії дорівнює порядку передаточної функції об'єкта керування. Наявність запізнення підвищує порядок передаточної функції об'єкта керування до нескінченості. Отже, з теорії витікає, що кількість переключень керувальної дії дорівнює нескінченості з частотою, що все збільшується наприкінці перехідного процесу. У реальності на практиці достатньо декількох переключень керувальної дії для отримання значного прискорення 1 UA 84939 U 5 10 15 20 25 перехідного процесу. Доцільним слід вважати кількість переключень керувальної дії, що дорівнює від трьох до п'яти. Слід також мати на увазі, що система автоматичного регулювання технологічних параметрів призначена не тільки для переводу вихідної величини об'єкта керування з одного значення на інше, а і на утримання (стабілізації) вихідної величини на потрібному, заданому значенні при дії технологічного навантаження та різноманітних обурень та завад. І це завдання при регулюванні багатьох технологічних параметрів є основним для систем автоматичного регулювання. Тому, якщо система регулювання знаходиться у стані відхилення вихідного параметра від заданого значення, то потрібно формувати додатковий керувальний імпульс в напрямі усунення даного відхилення. Застосування запропонованого способу автоматичного регулювання технологічних параметрів разом з усіма суттєвими ознаками, включаючи відмінні, покращує швидкодію при переводі вихідної величини об'єкта управління з одного значення на інше без перерегулювання і коливань, сприяє зменшенню відхиленню вихідного параметра об'єкта управління від заданого значення та більш швидкому поверненню вихідного параметра до заданого значення, усуненню коливань при прикладенні на об'єкт управління технологічного навантаження та завад. Спосіб пояснюється кресленням. На фіг. 1 зображений графік залежності похибки регулювання ε по ходу перехідних процесів вихідного параметра X. На фіг. 2 зображений графік зміни основної керувальної дії UК та додаткові керувальні імпульси UД. Спосіб автоматичного регулювання технологічних параметрів реалізують на підставі наступного алгоритму. 1. Визначається поточне значення похибки регулювання i як різниця заданого значення та виміряної вихідної величини в даному циклу регулювання, яка запам'ятається. 2. По поточному значенню похибки регулювання обчислюється корекція основної складової регулюючої дії. 3. Проводиться порівняння за абсолютними значеннями i з похибкою регулювання у попередньому циклу i1 (якщо цикл регулювання тільки розпочався, то приймають i 1 0 ): i i 1 . 30 35 40 45 (1) 4. Якщо умова (1) виконується, то має місце стан системи регулювання, при якому вихідна величина відхиляється від заданого значення під дією технологічного навантаження. При цьому для зменшення відхилення вихідної величини формується додаткова керувальна дія у вигляді прискорюючого імпульсу, який співпадає за знаком похибки регулювання i . Цей додатковий керувальний імпульс утримається незмінним до тих пір, доки виконується умова (1). При цьому кожного разу приймається максимальне значення похибки регулювання max , що дорівнює поточному значенню i в даному циклі регулювання: max i . Це значення max кожного разу запам'ятається. 5. Якщо умова (1) не виконується, то має місце стан системи регулювання, при якому вихідна величина повертається до заданого значення або відбувається її перевід з одного значення на інше відповідно зміні заданого значення. В цьому стані формуються керувальні дії у вигляді додаткових імпульсів як прискорюючого, так і гальмуючого характеру максимально можливої потужності. Моменти переключень цих імпульсів залежать від відношення поточної похибки до раніше запам'ятованої її максимального значення max . На основані результатів моделювання систем регулювання об'єктами з передаточними функціями різного порядку пропонується наступні показники переключень при формуванні керувальної дії у вигляді трьох додаткових імпульсів. Перший імпульс формується як прискорюючий, який співпадає зі знаком похибки регулювання. Цей імпульс утримається незмінним до тих пір, доки величина поточної похибки регулювання i не зменшитися до значення 0,5 max : 50 max i 0,5 max . (2) Після цього формується другий додатковий імпульс керувальної дії гальмуючого характеру протилежно знаку похибки регулювання i за умовою досягнення 0,3 max : 2 UA 84939 U 0,5 max i 0,3 max . (3) Далі формується третій додатковий імпульс керувальноої дії прискорюючого характеру, який співпадає зі знаком похибки регулювання i за умовою досягнення 0,2 max : 0,3 max i 0,2 max . (4) 5 10 Після чого 0,2 max значення похибки регулювання, що залишилось, буде усунено корекцією основної складової регулюючої дії. При п'яти імпульсах додаткової керувальної дії до приведених раніше умов (2), (3) і (4) додаються ще дві умови. Четвертий додатковий імпульс керувальної дії прискорюючого характеру формується за умовою: 0,2 max i 0,13 max . (5) П'ятий додатковий імпульс керувальної дії гальмуючого характеру формується за умовою: 0,13 max i 0,1 max . (6) 15 20 25 30 35 40 Після чого 0,1 max значення похибки регулювання, що залишилось, буде усунено корекцією основної складової регулюючої дії. Новим в реалізації способу автоматичного регулювання технологічних параметрів є визначення стану системи автоматичного регулювання з одночасним зберіганням максимального значення похибки регулювання, яке потрібно ліквідувати системі автоматичного регулювання і формування додаткових імпульсів керувальної дії як прискорюючого, так і гальмуючого характеру в залежності від відношень поточної похибки регулювання до її максимального значення. Хоча безпосереднього визначення динамічних показників об'єкта управління в пропонованому способі автоматичного регулювання технологічних параметрів не здійснюється, але ці зміні впливають на характер і тривалість перехідних процесів. Тому моменти часу, у яких відбуваються переключення додаткових імпульсів керувальної дії однозначно пов'язані з динамічними показниками об'єкта керування. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб автоматичного регулювання технологічних параметрів, що включає формування керувальної дії у вигляді керувальних імпульсів максимальної потужності, визначення поточного значення похибки регулювання і вимірювання регульованої величини об'єкта, точне утримання заданого значення регульованої величини, яке здійснюють обчисленням значення основної керувальної дії з врахуванням похибки регулювання, який відрізняється тим, що поточне значення похибки регулювання запам'ятовують і порівнюють зі значенням похибки у попередньому циклі формування керувальної дії, визначають стан системи автоматичного регулювання з точки зору відхилення вихідного параметра від заданого значення чи наближення вихідного параметра до заданого значення, запам'ятовують величину максимального значення похибки регулювання і до основної керувальної дії формують додаткові як прискорюючі, так і гальмуючі імпульси в залежності від відношень поточної похибки до її максимального значення, яке було запам'ятовано раніше. 3 UA 84939 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюSamedov Yusif Fakhrat ohly
Автори російськоюСамедов Юсиф Фахрат оглы
МПК / Мітки
МПК: G05B 11/00
Мітки: автоматичного, технологічних, регулювання, параметрів, спосіб
Код посилання
<a href="https://ua.patents.su/6-84939-sposib-avtomatichnogo-regulyuvannya-tekhnologichnikh-parametriv.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного регулювання технологічних параметрів</a>
Спосіб визначення похибок датчиків систем автоматичного регулювання параметрів технологічних процесів та пристрій для його здійснення
Номер патенту: 18197
Опубліковано: 01.07.1997
Автори: Шевченко Костянтин Леонідович, Скрипник Юрій Олексійович, Дубровний Віктор Опанасович
МПК: G05B 23/00
Мітки: процесів, датчиків, здійснення, систем, регулювання, визначення, похибок, технологічних, автоматичного, параметрів, пристрій, спосіб
Формула / Реферат:
1. Способ определения погрешностей датчиков систем автоматического регулирования параметров технологических процессов, заключающийся в том, что задатчиком устанавливают требуемое значение параметра технологического процесса, изменяют выходной сигнал датчика несколько раз, меняя соответствующим образом измеряемый параметр технологического процесса и вычисляют погрешности датчика по значениям калиброванных воздействий на выходной сигнал...
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання
Номер патенту: 103128
Опубліковано: 10.09.2013
Автор: Чепкунов Роман Анатолійович
МПК: G05B 13/02, G05B 11/01, H02P 5/00, G05B 11/32
Мітки: підпорядкованому, параметрів, системі, регулюванні, зовнішнього, регулювання, контуру, обмеженням, спосіб, автоматичного, параметра, внутрішнього
Формула / Реферат:
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів у системі автоматичного регулювання, який полягає в тому, що значення сигналу регульованого параметра зовнішнього контуру віднімають від його заданого значення, одержану різницю подають на вхід регулятора зовнішнього контуру, із вихідного сигналу обмежувача сигналу задання внутрішнього контуру віднімають...
Спосіб автоматичного регулювання параметрів мікроклімату в пташнику
Номер патенту: 72630
Опубліковано: 27.08.2012
Автори: Посмітний Валерій Вікторович, Степанов Михайло Тимофійович
МПК: G05D 23/00, F24F 5/00
Мітки: мікроклімату, автоматичного, параметрів, пташнику, регулювання, спосіб
Формула / Реферат:
Спосіб автоматичного регулювання параметрів мікроклімату в пташнику, що складається з вимірювання і регулювання температури у пташнику шляхом зміни витрат палива на горіння в теплогенераторах, вимірювання і регулювання вологості у пташнику шляхом зміни витрат води на розприскування, вимірювання і регулювання розрідження у пташнику шляхом зміни величини відкриття бокових клапанів в обладнанні вентиляції пташника, корегування компенсації...
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання
Номер патенту: 76245
Опубліковано: 25.12.2012
Автор: Чепкунов Роман Анатолійович
МПК: G05B 11/01, H02P 5/00
Мітки: регулювання, зовнішнього, параметра, контуру, системі, підпорядкованому, регулюванні, автоматичного, обмеженням, спосіб, внутрішнього, параметрів
Формула / Реферат:
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання, який полягає в тому, що регульований параметр зовнішнього контуру віднімають із його заданого значення, одержану різницю подають на вхід регулятора зовнішнього контуру, із вихідного сигналу обмежувача сигналу задання внутрішнього контуру віднімають регульований параметр...
Спосіб автоматичного регулювання параметрів інерційних об’єктів із запізнюванням
Номер патенту: 67725
Опубліковано: 12.03.2012
Автори: Коновалов Михайло Андрійович, Ковриго Юрій Михайлович, Бунке Олександр Сергійович
МПК: G05B 11/00
Мітки: запізнюванням, регулювання, автоматичного, інерційних, спосіб, об'єктів, параметрів
Формула / Реферат:
Спосіб автоматичного регулювання параметрів інерційних об'єктів із запізнюванням, що полягає у формуванні керуючого сигналу за пропорційно-інтегральним законом регулювання мікропроцесорним контролером, який відрізняється тим, що керуючий сигнал формують у мікропроцесорному контролері за двоканальною структурою, при цьому швидкодію регулятора забезпечують виробленням форсуючого керуючого сигналу першим каналом згідно з функцією:
Попередній патент: Подрібнювач зернових кормів
Наступний патент: Вільновихровий насос
Випадковий патент: Спосіб вирощування баклажана в плівковій теплиці при краплинному зрошенні