Спосіб експлуатації самохідної збиральної машини, що має жатку та подрібнювально-розподільний пристрій (варіанти)
Номер патенту: 86740
Опубліковано: 25.05.2009
Автори: Штрікер Норберт, Брінкманн Йорн, Штіллер Торстен, Нірманн Мартін, Хугенрот Людгер, Терьорде Штефан
Формула / Реферат
1. Спосіб експлуатації самохідної збиральної машини (1), що має жатку (2), з розташованим у вивантажувальній зоні подрібнювально-розподільним пристроєм (4), з якого потік збираної маси подають щонайменше в один вентилятор-кидалку (7), обладнаний щонайменше однією обмежувальною заслінкою (10), встановленою з можливістю зміни свого положення і обладнаною приводом (11) для регулювання напрямку виходу потоку збираної маси з вентилятора-кидалки (7), який відрізняється тим, що здійснюють керування приводом (11) для регулювання положення щонайменше однієї обмежувальної заслінки (10) залежно від робочої ширини (3) жатки (2).
2. Спосіб за п. 1, який відрізняється тим, що регулювання обмежувальної заслінки (10) здійснюють за допомогою електрогідравлічного виконавчого механізму (12), який з'єднаний з блоком керування (59).
3. Спосіб за п. 2, який відрізняється тим, що регулювання положення виконавчого механізму (12) детектують датчиком кута повороту (58), який з'єднаний з блоком керування (59).
4. Спосіб за п. 2 або 3, який відрізняється тим, що жатку (2) детектують з'єднаним з блоком керування (59) датчиком (57), який передає на блок керування (59) сигнал, що відповідає робочій ширині (3) жатки (2).
5. Спосіб за п. 4, який відрізняється тим, що накопичена в пам'яті блока керування (59) база даних (60) містить множину функціональних кривих різних жаток, при цьому за сигналом (Y), що відповідає робочій ширині (3) жатки (2), з бази даних (60) вибирають відповідну функціональну криву (61).
6. Спосіб за п. 5, який відрізняється тим, що виконавчим механізмом (12) керують за відповідною функціональною кривою (61).
7. Спосіб за п. 5 або 6, який відрізняється тим, що в блоці керування (59) за функціональною кривою (61) і щонайменше за додатковим параметром (62) обчислюють модифіковану функціональну криву (63).
8. Спосіб експлуатації самохідної збиральної машини (1), що має жатку (2), з розташованим у вивантажувальній зоні подрібнювально-розподільним пристроєм (4), з якого потік збираної маси подають щонайменше в один вентилятор-кидалку (7), обладнаний щонайменше однією обмежувальною заслінкою (10), встановленою з можливістю зміни свого положення і обладнаною приводом (11) для регулювання напрямку виходу потоку збираної маси з вентилятора-кидалки (7), який відрізняється тим, що здійснюють керування приводом (11) для регулювання положення щонайменше однієї обмежувальної заслінки (10) залежно від розподілу (V) потоку збираної маси на ґрунті (19).
9. Спосіб за п. 8, який відрізняється тим, що привід (11) виконаний у вигляді електрогідравлічного виконавчого механізму (12), який сполучений з блоком керування (59).
10. Спосіб за п. 9, який відрізняється тим, що регулювання положення виконавчого механізму (12) детектують за допомогою датчика (58) кута повороту, який сполучений з блоком керування (59).
11. Спосіб за п. 8, який відрізняється тим, що для визначення розподілу (V) потоку збираної суміші визначають профіль (SD) товщини потоку збираної маси на поверхні (15) вивантаження.
12. Спосіб за п. 8 або 11, який відрізняється тим, що розподіл (V) збираної маси на ґрунті (19) визначають з використанням бездротового способу за допомогою детекторного пристрою (16).
13. Спосіб за п. 12, який відрізняється тим, що детекторний пристрій (16) виконаний у вигляді камери інфрачервоного випромінювання, яка сприймає інфрачервоне зображення поверхні (15) вивантаження і на основі цього зображення формує температурний профіль (Т).
14. Спосіб за п. 13, який відрізняється тим, що температурний профіль (Т) передають на блок керування (59), який генерує профіль (О) поверхні і здійснює керування виконавчим механізмом (12) залежно від профілю поверхні (О).
15. Спосіб за п. 12 , який відрізняється тим, що детекторний пристрій (16) виконаний у вигляді лазерного датчика (18), здатний сканувати поверхню (15) вивантаження і складати профіль (О) поверхні.
16. Спосіб за п. 14 або 15, який відрізняється тим, що профіль (О) поверхні передають на блок керування (59), який здатний оцінити цей профіль і керувати виконавчим механізмом (12) залежно від профілю (О) поверхні.
Текст
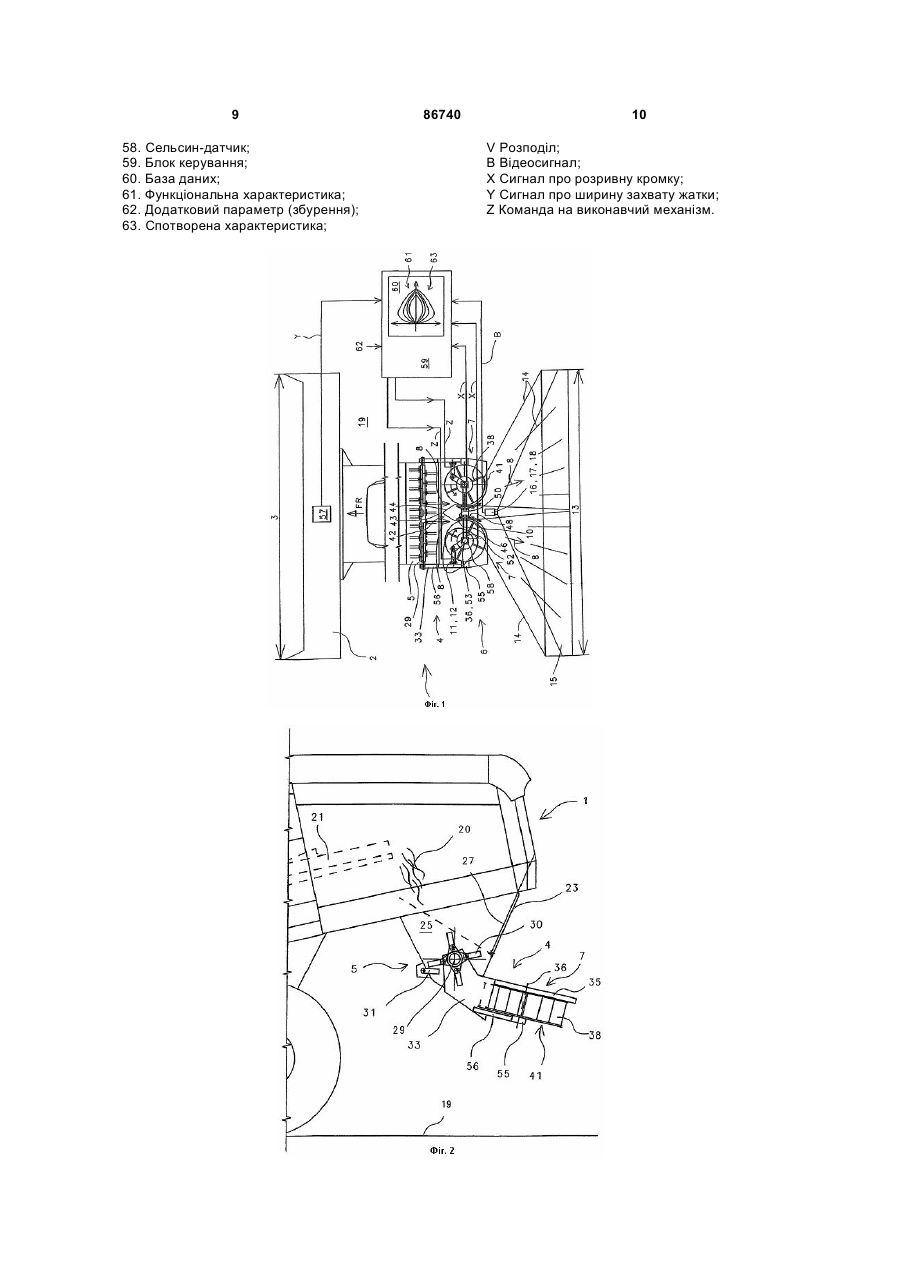
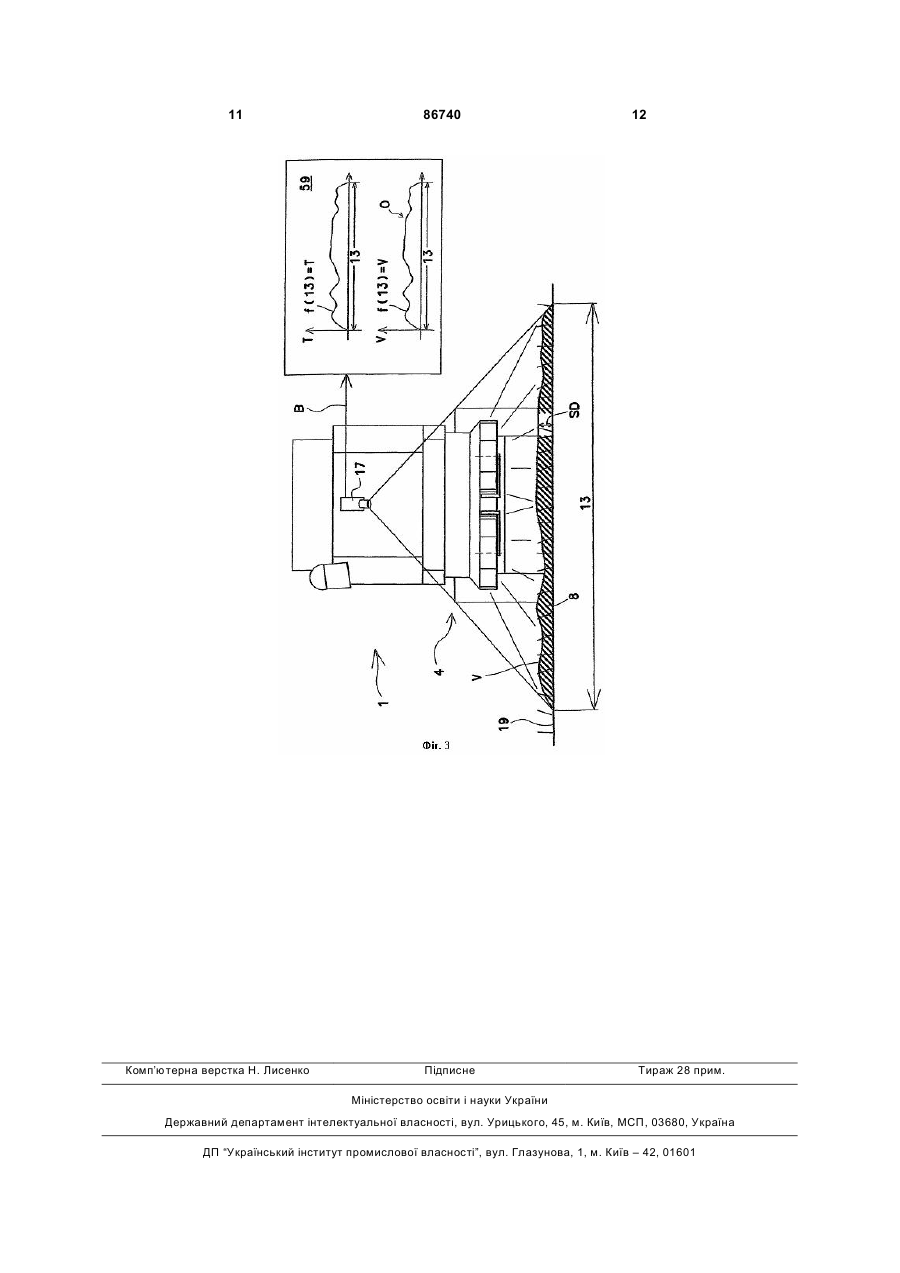
, який передає на блок керування (59) сигнал, що відповідає робочій ширині (3) жатки (2). 5. Спосіб за п.4, який відрізняється тим, що накопичена в пам'яті блока керування (59) база даних (60) містить множину функціональних кривих різних 2 (19) 1 3 86740 4 вивантаження і на основі цього зображення формує температурний профіль (Т). 14. Спосіб за п.13, який відрізняється тим, що температурний профіль (Т) передають на блок керування (59), який генерує профіль (О) поверхні і здійснює керування виконавчим механізмом (12) залежно від профілю поверхні (О). 15. Спосіб за п.12 , який відрізняється тим, що детекторний пристрій (16) виконаний у вигляді лазер ного датчика (18), здатний сканувати поверхню (15) вивантаження і складати профіль (О) поверхні. 16. Спосіб за п.14 або 15, який відрізняється тим, що профіль (О) поверхні передають на блок керування (59), який здатний оцінити цей профіль і керувати виконавчим механізмом (12) залежно від профілю (О) поверхні. Винахід стосується способів експлуатації самохідної збиральної машини , що має жатку та подрібнювально - розподільний пристрій. [З ЕР 0 212 337] відомо призначений для зернозбирального комбайна пристрій розподілу соломи і полови. В цьому пристрої у задній вивантажувальній зоні зернозбирального комбайна встановлені поряд один з одним з можливістю обертання навколо паралельних осей у взаємно протилежних напрямках два ротори з декількома переставними листами у формі лопатей. Обидва ротори містять на зовнішньому боці механічно переставні секційні кожухи, що обмежують зону розкиду зібраної маси. Обидва ротори працюють з однаковим числом обертів від одного приводу. Недоліком вказаного пристрою є те, що ширину розкидання зібраної маси за комбайном встановлюють шляхом ручного центрування роторів і секційних кожухів або ж шляхом встановлення змінного числа обертів лопатей роторів, при цьому не забезпечується рівномірний розподіл соломи і полови на полі. Тому в основу винаходу поставлена задача удосконалення комбайна таким чином, щоб ширина розкиду зібраної маси автоматично підганялася до ширини захвату жатки, а пристрій розподілу потоку зібраної маси при кожній ширині її розкидання укладав би цю масу на полі з однаковою товщиною шару. Поставлена задача вирішується заявленими способами (варіантами). В описі описані також переважні форми виконання винаходу Оскільки привід перестановки щонайменше однієї обмежувальної заслінка (розривної кромки) регулюється залежно від робочої ширини жатки (ширини захвату жатки), то ширина розкиду зібраної маси простим чином автоматично підганяється до робочої ширині жатки . Переважно перестановку обмежувальної заслінки здійснюють за допомогою електрогідравлічного виконавчого механізму, сполученого з блоком керування, що дозволяє за його допомогою регулювати як діапазон, так і швидкість перестановки розривної кромки. Детектування перестановки виконавчого механізму переважно за допомогою датчика кута поворота (сельсин-датчика), сполученого з блоком керування, дозволяє одержувати постійну інформацію про положення розривної кромки. Щоб розвантажити водія від різних завдань, жатка переважно детектується сполученим з блоком керування датчиком, який видає на блок керування сигнал про ширину жатки, відповідний ширині її захвату. Введена в блок керування база даних переважно містить безліч функціональних характеристик різних жаток. За сигналом про ширину жатки, відповідним ширині захвату жатки, з бази даних автоматично обирається потрібна функціональна характеристика, що дозволяє визначити оптимальні робочі параметри комбайна без участі водія і, отже, додатково його розвантажує. Виконавчий механізм регулюється переважно з використанням функціональних характеристик, що дозволяє одержувати оптимальний розподіл потоку зібраної маси за допомогою автоматичного встановлення ширини розкиду зібраної маси. Для урахування інших зовнішніх впливів на функціональні характеристики комбайна, наприклад, впливу напряму і сили вітру, за функціональними характеристиками можна обчислювати спотворені збурними діяннями характеристики. Для досягнення максимально можливої рівномірності розподілу потоку зібраної маси на ґрунті регулюють привід перестановки щонайменше однієї розривної кромки залежно від розподілу потоку зібраної маси на ґрунті. У цьому способі перестановку розривної кромки також здійснюють за допомогою виконавчого механізму, сполученого з блоком керування, що дозволяє регулювати як діапазон, так і швидкість перестановки розривної кромки. Детектування перестановки виконавчого механізму переважно за допомогою сельсин-датчика, сполученого з блоком керування, дозволяє одержувати постійну інформацію про положення розривної кромки. Для визначення розподілу потоку зібраної маси переважно визначають профіль товщини шару розподіленого потоку зібраної маси, який можна розглядати як міру розподілу. Для виміру розподілу зібраної маси в масштабі реального часу його визначають з використанням бездротового блоку Сенсієра. В одному з прикладів виконання винаходу для визначення розподілу подрібненої маси інфрачервоною камерою знімають зображення поверхні вивантаження і відповідно до побудованого за цим зображенням температурного профілю регулюють розподіл вказаної маси. Інфрачервоне зображення 5 дає ту перевагу, що воно враховує профіль поверхні ґрунту. У ще одному прикладі здійснення винаходу для настройки виконавчого механізму, що служить для переміщення розривної кромки, безпосередньо після виміру розподілу зібраної маси дані про температурний профіль передають на блок керування, який за цим профілем генерує профіль поверхні, що використовується для регулювання виконавчого механізму. В альтернативному прикладі здійснення винаходу як блок Сенсієра використовують лазерний датчик, який зондує поверхню вивантаження, на основі чого будується профіль поверхні. Порівняно з інфрачервоною камерою лазерний датчик дешевше і забезпечує достатню точність. Щоб також і в цьому альтернативному прикладі здійснення винаходу забезпечувати пригонку (підгонку) переміщення розривної кромки безпосередньо після виміру розподілу зібраної маси, дані про профіль поверхні передають на блок керування, який оцінює цей профіль і залежно від нього регулює виконавчий механізм. Наступні переважні форми виконання винаходу є предметом подальших залежних пунктів формули і описуються в декількох прикладах здійснення винаходу з посиланнями на декілька фігур креслень, де показані: на Фіг.1 - схема зернозбирального комбайна при збиранні врожаю, вигляд зверху; на Фіг.2 - задня частина комбайна, вигляд збоку; на Фіг.3 - комбайн, вигляд ззаду. На Фіг.1 показана схема зернозбирального комбайна 1 при збиранні врожаю, вигляд зверху. Розташована спереду комбайна 1 жатка 2 з шириною захвату 3 жне на полі збирану масу і відразу подає її на робочі органи комбайна 1, відомі самі по собі і тому детально тут не описані. Робочі органи комбайна 1 поділяють збирану масу на зерно, полову і солому. В задній частині комбайна 1 розташований подрібнювально-розподільний пристрій 4, що складається з подрібнювального органа 5, приєднаного до розподільного пристрою 6. Розподільний пристрій 6 складається з двох вентиляторів-кидалок 7, які радіальне розподіляють потік зібраної маси, що подається від подрібнювального органа 5. Вентилятори-кидалки 7 оснащені здійснюючими коливальні рухи розривними кромками 10, кожна з яких приводиться незалежним виконавчим механізмом 12. На виході з розподільного пристрою 6 розривні кромки 10 відхиляють і поділяють потік 8 збираної маси, що виходить з вентиляторів-кидалок 7. При цьому діапазон перестановки розривних кромок 10, з одного боку, визначається шириною розкиду 13 потоку 8 збираної маси і швидкістю переміщень розривних кромок 10, а з іншого - розподілом V потоку 8 зібраної маси на грунті 19 (Фіг.3), За вентиляторамикидалками 7 показано декілька траєкторій польоту 14 розподілених кількостей збираної маси 8, причому кінці зовнішніх траєкторій 14 визначають ширину розкиду 13 маси 8 назовні. За шириною розкиду 13 у напрямку руху FR збиральної машини знаходиться поверхня 15 вивантаження, на яку 86740 6 укладається рівномірно розподілений потік зібраної маси 8. На поверхню 15 спрямована інфрачервона камера 17, встановлена в задній частині комбайна 1. Вентилятори-кидалки 7 встановлені на рамі 33 зовні корпусу соломорізки на її валу 29. З рамою 33 сполучена консольне виступаюча назад кришка 35 з листового металу (див. Фіг.2), на якій встановлені привідні осі обертання 36. Осі 36 оснащені гнучкими кидальними лопатями 38, які обмежені знизу диском 41, що обертається разом з ними. Між обома вентиляторами-кидалками, утвореними з верхньої кришки 35, обертових осей 36, кидальних лопатей 38 і дисків 41, розташований Vподібний поділяючий збирану масу щиток 42, гострий кінець 43 якого спрямований проти потоку збираної маси 8, що надходить з подрібнювальнорозподільного пристрою 6. Два крила 44 поділяючого зібрану масу щитка 42 закривають простір між ними і утворюють секційні нерухомі кожухи 46 вентиляторів-кидалок 7. До кожухів 46 приєднані рухомі секційні кожухи 48, що складаються з додаткового стінного елемента 50, закріпленого на колінчастому важелі 52, який поворотно встановлений на цапфі 53. Остання жорстко сполучена з поперечиною 55, закріпленою за допомогою поздовжніх несучих балок 56 на рамі 33. До іншого кінця колінчастого важеля 52 шарнірно приєднаний виконавчий механізм 12, який з другого боку шарнірно сполучений з поперечиною 56 і приводить рухомі секційні кожухи 48. Обидва приводних кожуха 48 утворюють випускний канал вентилятора-кидалки 7, що проходить у напрямку обертання розривних кромок 10. На Фіг.2 показаний бічний вигляд задньої ділянки комбайна 1. Виділена із зібраної маси солома 20, що надходить з раніше не описаних відомих робочих органів комбайна 1, потрапляє на клавішний соломотряс 21 у нижній зоні комбайна 1. Задня стінка 23 корпусу 25 подрібнювача прикріплена до валкувального щитка 27, що переміщається між двома позиціями. У позиції валкування SW (показаній штриховими лініями) солома 20, що падає з клавішного соломотряса 21 на валкувальний щиток 27, сковзає по подрібнювально-розподільному пристрою 4 і укладається на грунті у валок (не показаний). У позиції подрібнення НА валкувального щитка 27 солома 20 падає на подрібнювальний орган 5. Подрібнювальний орган 5 містить вал 29, встановлений у корпусі 25 подрібнення. Вал 29 оснащений рухомими ножами 30, які взаємодіють з протирізами 31, закріпленими в корпусі 25. Ножі 30 з протирізами 31 подрібнюють солому 20 і спрямовують подрібнену солому в радіальному напрямку до двох вентиляторів-кидалок 7. Показаний на Фіг.1 комбайн оснащений в різних місцях різними датчиками. До них належить датчик 57, що визначає ширину захвату жатки 2. В області розташування вентиляторів-кидалок 7 розташовані сельсин-датчики 58, що розпізнають положення розривних кромок 10. Крім того, в задній частині комбайна 1 встановлений блок Сенсієра 16. У першому прикладі виконання винаходу ширина захвату 3 жатки 2 автоматично визначається 7 датчиком 57 на комбайні 1. Датчик 57 генерує сигнал Υ ширини захвату жатки, який передається на сполучений з датчиком 57 блок керування 40. Позиція розривної кромки 10 вимірюється сельсин-датчиком 58, сполученим з блоком керування 59. Сельсин-датчик 58 генерує сигнал X, пропорційний куту повороту А колінчастого важеля 52, для зміни обертання осі 36. У блоці керування 59 є база даних 60 з декількома функціональними характеристиками 61 різних жаток 2, потрібних для регулювання залежних від положення швидкості і діапазону перестановки виконавчого механізму 12. За сигналом Y, що визначає ширину жатки, з бази даних 60 обирається потрібна характеристика 61 і залежно від сигналу Χ відповідно до характеристики 61 встановлюється команда керування Ζ ,що передається на виконавчий механізм 12. Для урахування впливу тривалих збурних діянь 62 можна за встановленою характеристикою 61 і збурними діяннями 62 за допомогою керуючого блоку 59 обчислювати спотворену характеристику 63. До збурних діянь належать такі параметри збираної маси, як кількість соломи, швидкість руху комбайна, сила або напрям вітру, нахил комбайна. На Фіг.3 показаний вигляд ззаду комбайна 1 з інфрачервоною камерою 17, спрямованою на поверхню вивантаження 15. На поверхню вивантаження 15 лягає розподілений на ґрунті 19 потік зібраної маси. Ґрунт 19 з розподіленим на ньому потоком зібраної маси показаний у поперечному розрізі, так що профіль товщини шару SD зібраної маси показаний по ширині розкиду 13. За профілем SD можна визначати розподіл V потоку зібраної маси. Інфрачервона камера 17, розташована на задньому боці комбайна 1 і спрямована на поверхню розкиду 15, генерує відеосигнал В, який подається на сполучений з цією камерою блок керування 59. Блок керування 59 за відеосигналами В та сигналами Χ відтворює температурний профіль Т. Температурний профіль Τ пропорційний профілю товщини шару SD, в якому розпізнається розподіл V суміші соломи і полови на поверхні розкиду 15. Порівнянність температурного профілю Т і профілю товщини шару SD заснована на тій передумові, що відмінності у кількостях зібраної маси на полі обумовлюють відмінності у температурах поверхні поля. Блок керування 59 оцінює температурний профіль Т і відповідно до нього генерує профіль поверхні О. Блок керування 59 передає на виконавчий механізм 12 команду керування Ζ, яку він залежно від профілю поверхні О регулює таким чином, щоб розподіл V змінювався для забезпечення однакової температури у всіх місцях поверхні розкиду 15. Обидва способи можна поєднувати один з одним, причому у жатці 2 регулюють, наприклад, діапазон коливань розривних кромок 10 і, отже, ширину розкиду 13, тоді як розподіл V використовують для регулювання швидкості руху розривних кромок 10. Ще один приклад виконання винаходу передбачає можливість зондування лазерним датчиком 86740 8 18 поверхні розкиду 15 для визначення розподілу зібраної маси на полі. За даними вимірювань встановлюють профіль поверхні О. Блок керування 59 оцінює профіль поверхні О і передає команду керування Ζ на виконавчий механізм 12, за рахунок чого виконавчий механізм 12 регулюється залежно від профілю поверхні з метою такої зміни розподілу V, яка забезпечувала б максимально плоску поверхню вивантаження 15. Порівнянність профілю поверхні О і профілю товщини зібраної маси SD можлива при допущенні, що ґрунт 19, на який укладається потік зібраної маси, наближається до плоскої поверхні, а обидва параметри О і SD прямо пропорційні один одному. Сигнал про профіль поверхні О передається на блок керування 59, який оцінює цей профіль і регулює виконавчий орган залежно від профілю поверхні О. Винахід не обмежується описаними прикладами його виконання, але може бути використаний у будь-якій збиральній машині з досягненням описаних ефектів. Перелік позицій механізмів на кресленнях: 1. Збиральна машина; 2. Жатка; 3. Ширина захвату жатки; 4. Подрібнювально-розподільний пристрій; 5. Подрібнювальний орган; 6. Розподільний пристрій; 7. Вентилятор-кидалка; 8. Кількість зібраної маси; 10. Розривна кромка; 11. Привід; 12. Виконавчий механізм; 13. Ширина розкиду; 14. Траєкторії польоту частинок; 15. Поверхня вивантаження; 16. Блок Сенсієра; 17. Інфрачервона камера; 18. Лазерний датчик; 19. Ґрунт; 20. Солома; 21. Клавішний соломотряс; 23. Задня стінка корпусу; 25. Корпус подрібнення; 27. Валкувальний щиток; 29. Вал подрібнювача; 30. Рухомий ніж; 31. Протиріз; 33. Рама; 35. Кришка; 36. Вісь обертання; 38. Кидальні лопаті; 41. Диск; 42. Поділяючий зібрану масу щиток; 43. Гострий кінець щитка; 44. Крило щитка; 46. Нерухомий секційний кожух; 48. Рухомий секційний кожух; 50. Стінний елемент; 52. Колінчастий важіль; 53. Цапфа; 55. Поперечина; 56. Поздовжня несуча балка; 57. Датчик; 9 58. Сельсин-датчик; 59. Блок керування; 60. База даних; 61. Функціональна характеристика; 62. Додатковий параметр (збурення); 63. Спотворена характеристика; 86740 10 V Розподіл; В Відеосигнал; Χ Сигнал про розривну кромку; Υ Сигнал про ширину захвату жатки; Ζ Команда на виконавчий механізм. 11 Комп’ютерна верстка Н. Лисенко 86740 Підписне 12 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of operating a self-propelling harvester provided with a cutterbar and a chopping and distributing device (variants)
Автори англійськоюNiermann Martin, Brinkmann Joern, Strieker Norbert, Hugenroth Ludger, Tereorde Stefan, Stiller Thorsten
Назва патенту російськоюСпособ эксплуатации самоходной уборочной машины, имеющей жатку и измельчительно-распределительное устройство (варианты)
Автори російськоюНирманн Мартин, Бринкманн Йорн, Штрикер Норберт, Хугенрот Людгер, Терьорде Штефан, Штиллер Торстен
МПК / Мітки
МПК: A01D 37/00
Мітки: жатку, збиральної, подрібнювально-розподільний, пристрій, експлуатації, має, самохідної, варіанти, спосіб, машини
Код посилання
<a href="https://ua.patents.su/6-86740-sposib-ekspluataci-samokhidno-zbiralno-mashini-shho-maeh-zhatku-ta-podribnyuvalno-rozpodilnijj-pristrijj-varianti.html" target="_blank" rel="follow" title="База патентів України">Спосіб експлуатації самохідної збиральної машини, що має жатку та подрібнювально-розподільний пристрій (варіанти)</a>
Пристрій для оптимізації перевантажування зернової маси із збиральної машини на транспортні засоби (варіанти)
Номер патенту: 75043
Опубліковано: 15.03.2006
Автор: Бенке Віллі
МПК: A01B 73/00, A01D 90/00
Мітки: машини, оптимізації, засоби, маси, зернової, варіанти, перевантажування, пристрій, транспортні, збиральної
Формула / Реферат:
1. Пристрій для оптимізації перевантажування зернової маси із збиральної машини на транспортні засоби, який відрізняється тим, що на збиральній машині (1) встановлені щонайменше один блок керування (3) для генерування сигналів керування швидкістю руху і/або кутом повороту транспортного засобу (5), передавальний пристрій (11) для бездротової передачі сигналів керування на транспортний засіб (5), на якому встановлений приймальний пристрій (6)...
Спосіб захисту робочих органів збиральної машини при попаданні сторонніх предметів та пристрій для його здійснення
Номер патенту: 24683
Опубліковано: 04.08.1998
Автори: Нєдовєсов Віктор Іванович, Борошок Лев Абрамович
МПК: A01D 75/00
Мітки: сторонніх, спосіб, машини, здійснення, збиральної, пристрій, робочих, попаданні, органів, предметів, захисту
Формула / Реферат:
1. Спосіб захисту робочих органів збиральної машини при попаданні сторонніх предметів, в якому визначають наявність стороннього аварійнонебезпечного предмета в рослинній масі, яка подається до технологічних переробляючих робочих органів, після чого зупиняють подаючий механізм, який відрізняється тим, що вимірюють механічні коливання по всій поверхні платформи зрізаючого чи підбираючого механізма і по параметрам цих коливань судять про те, що...
Пристрій для перевантаження сільськогосподарських матеріалів із збиральної машини на транспортний контейнер
Номер патенту: 72437
Опубліковано: 15.03.2005
Автори: Норберт Дікханс, Хрістоф Бусманн, Сєбастьян Гамбле, Йохен Хустер
МПК: A01D 34/00
Мітки: машини, сільськогосподарських, матеріалів, перевантаження, збиральної, транспортний, пристрій, контейнер
Формула / Реферат:
1. Пристрій для перевантаження сільськогосподарських матеріалів із збиральної машини на транспортний контейнер з використанням поворотного перевантажувального пристрою, який відрізняється тим, що кут між поворотним перевантажувальним пристроєм і поздовжньою віссю збиральної машини виконаний регульованим в залежності від параметрів
Пристрій для автоматичного керування і регулювання руху самохідної машини по рядках рослин

Номер патенту: 56641
Опубліковано: 15.05.2003
Автори: Білик Стефанія Григорівна, Гевко Іван Богданович
МПК: A01B 69/04
Мітки: керування, пристрій, машини, рослин, рядках, самохідної, автоматичного, регулювання, руху
Формула / Реферат:
Пристрій для автоматичного керування і регулювання руху самохідної машини по рядках рослин, що містить керований міст з колесами, на якому встановлений гідроциліндр, корпус якого шарнірно з'єднаний з керованим мостом, а шток через тягу зв'язаний з рульовою трапецією повороту коліс, а також копіюючий щуп, зв’язаний з помпою-дозатором автомата, кермо, зв'язане з помпою-дозатором керма, гідросистему, виконану у вигляді масляного бака, помпи,...
Пристрій для кондиціонування повітря в кабіні самохідної машини
Номер патенту: 30409
Опубліковано: 15.11.2000
Автори: Глебов Василь Васильович, Куров Микола Костянтинович, Однороженко Іван Григорович
МПК: B60H 3/00
Мітки: машини, пристрій, кабіни, повітря, кондиціонування, самохідної
Формула / Реферат:
Пристрій для кондиціонування повітря в кабіні самохідної машини, що містить фільтр, вентилятор подачі повітря в теплообмінник посередково-випарювального охолодження з каналами основного потоку, місткість для води, який відрізняється тим, що він містить рекуперативний теплообмінник з каналами для проходу основного потоку в прямому і зворотному напрямках і канали для проходу водяної пари, які під'єднані до впускного колектора двигуна та...
Попередній патент: Планетарний гвинт
Наступний патент: Амброксол для лікування болю у порожнині рота та глотки
Випадковий патент: Нова форма застосування цинеолу