Двокривошипні чотириланкові важільні механізми з регульованою амплітудою коливання кутової швидкості вихідної ланки
Номер патенту: 87123
Опубліковано: 27.01.2014
Автори: Кіницький Ярослав Тимофійович, Головко Олена Володимирівна

Формула / Реферат
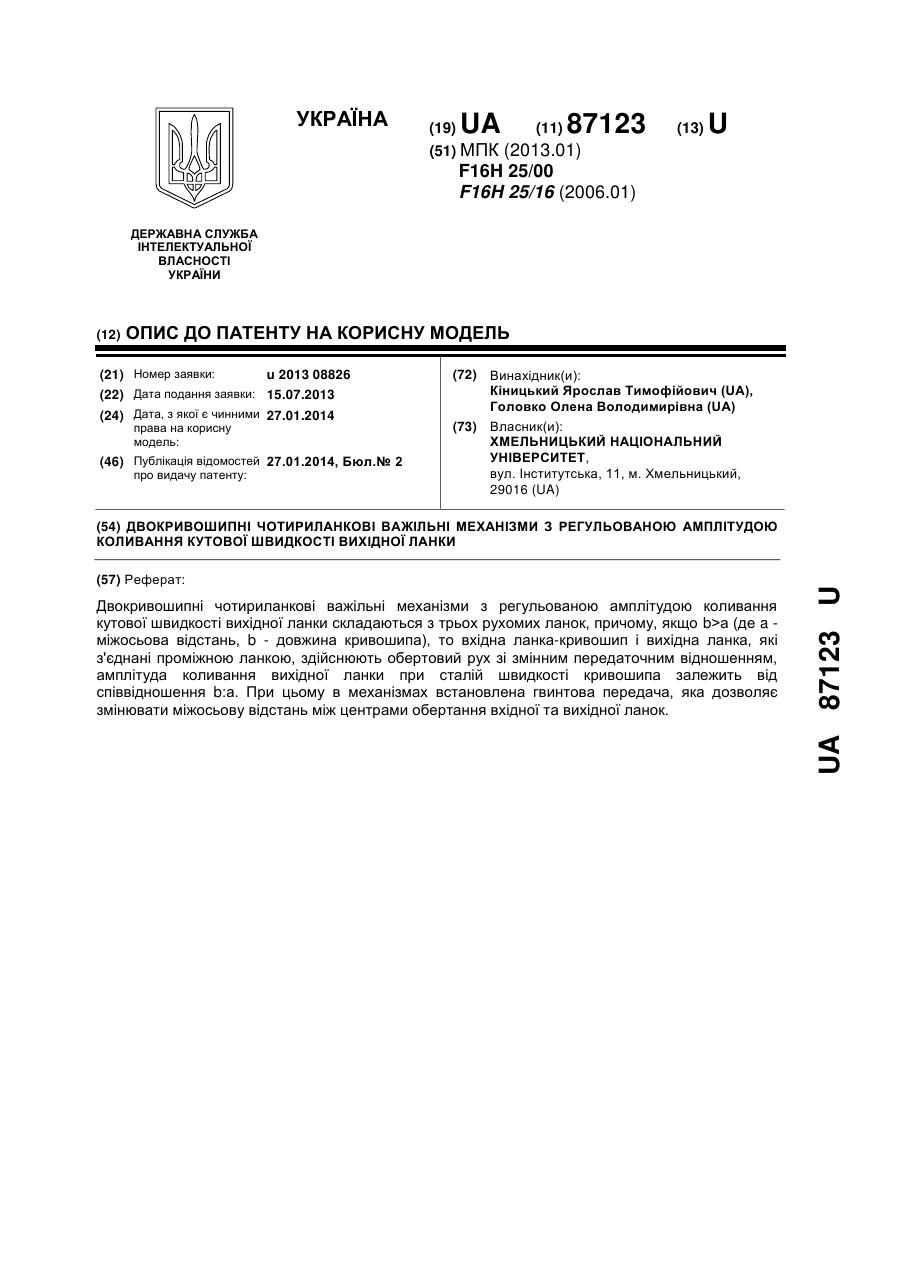
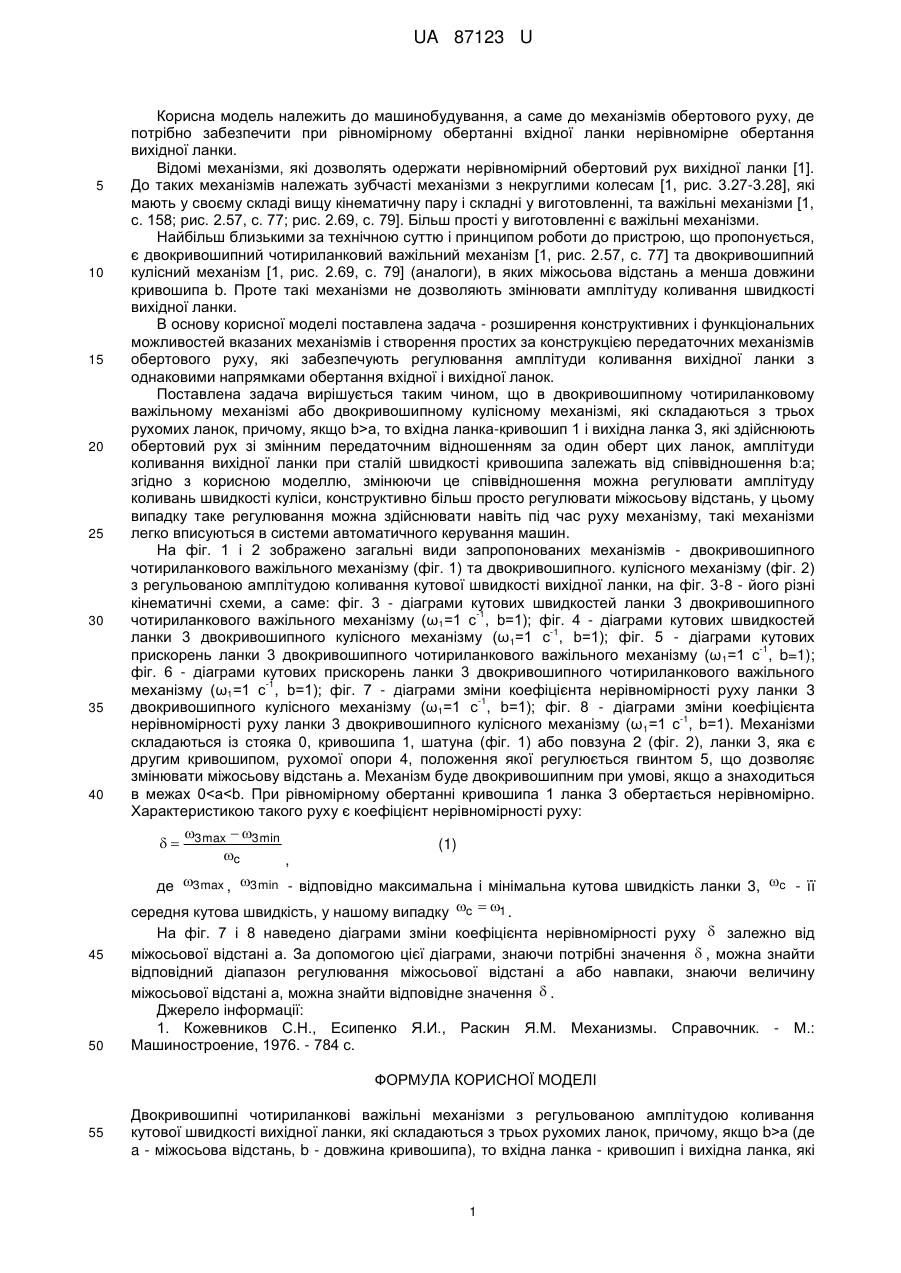
Двокривошипні чотириланкові важільні механізми з регульованою амплітудою коливання кутової швидкості вихідної ланки, які складаються з трьох рухомих ланок, причому, якщо b>а (де a - міжосьова відстань, b - довжина кривошипа), то вхідна ланка - кривошип і вихідна ланка, які з'єднані проміжною ланкою, здійснюють обертовий рух зі змінним передаточним відношенням, амплітуда коливання вихідної ланки при сталій швидкості кривошипа залежить від співвідношення b:а, яківідрізняється тим, що в механізмах встановлена гвинтова передача, яка дозволяє змінювати міжосьову відстань між центрами обертання вхідної та вихідної ланок.
Текст
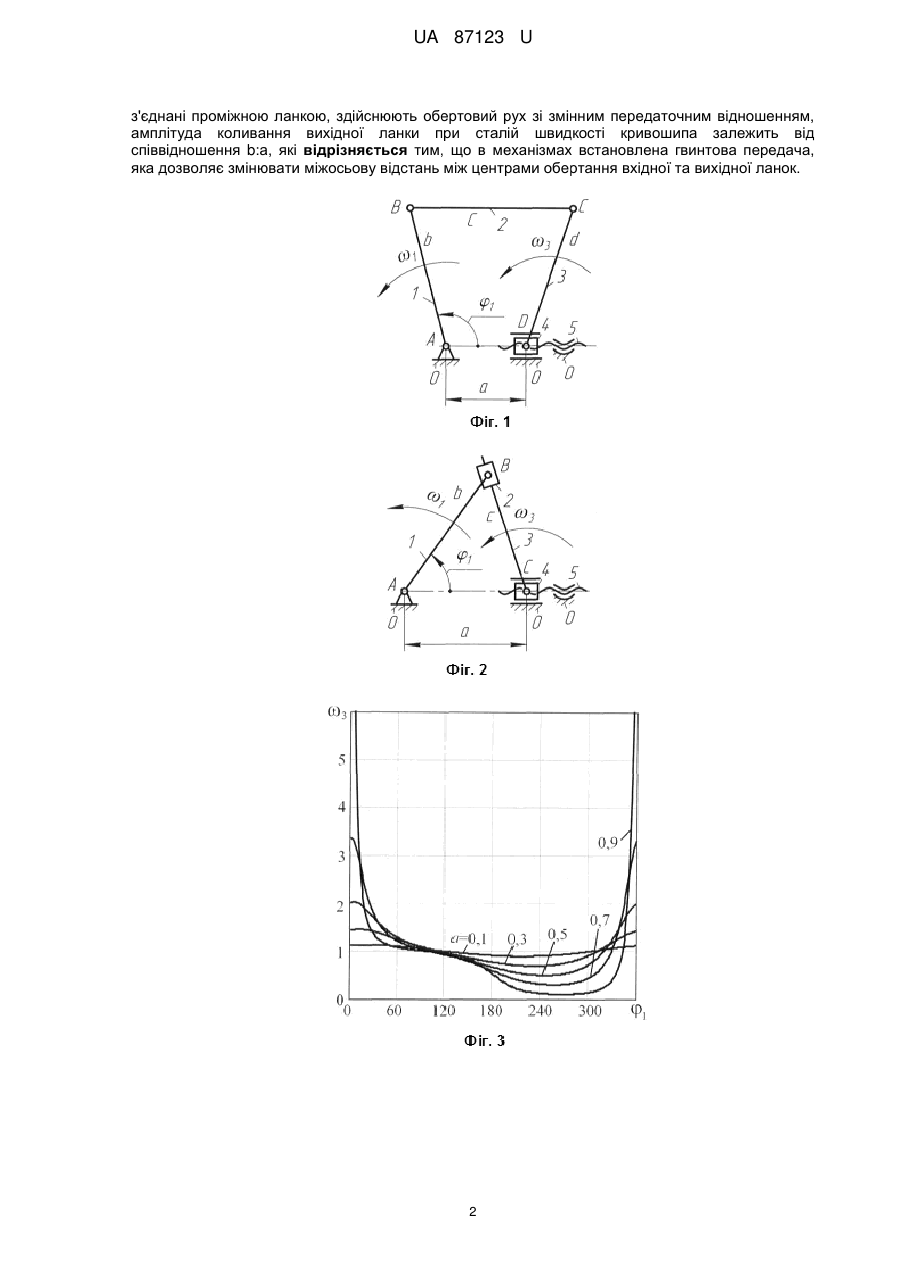
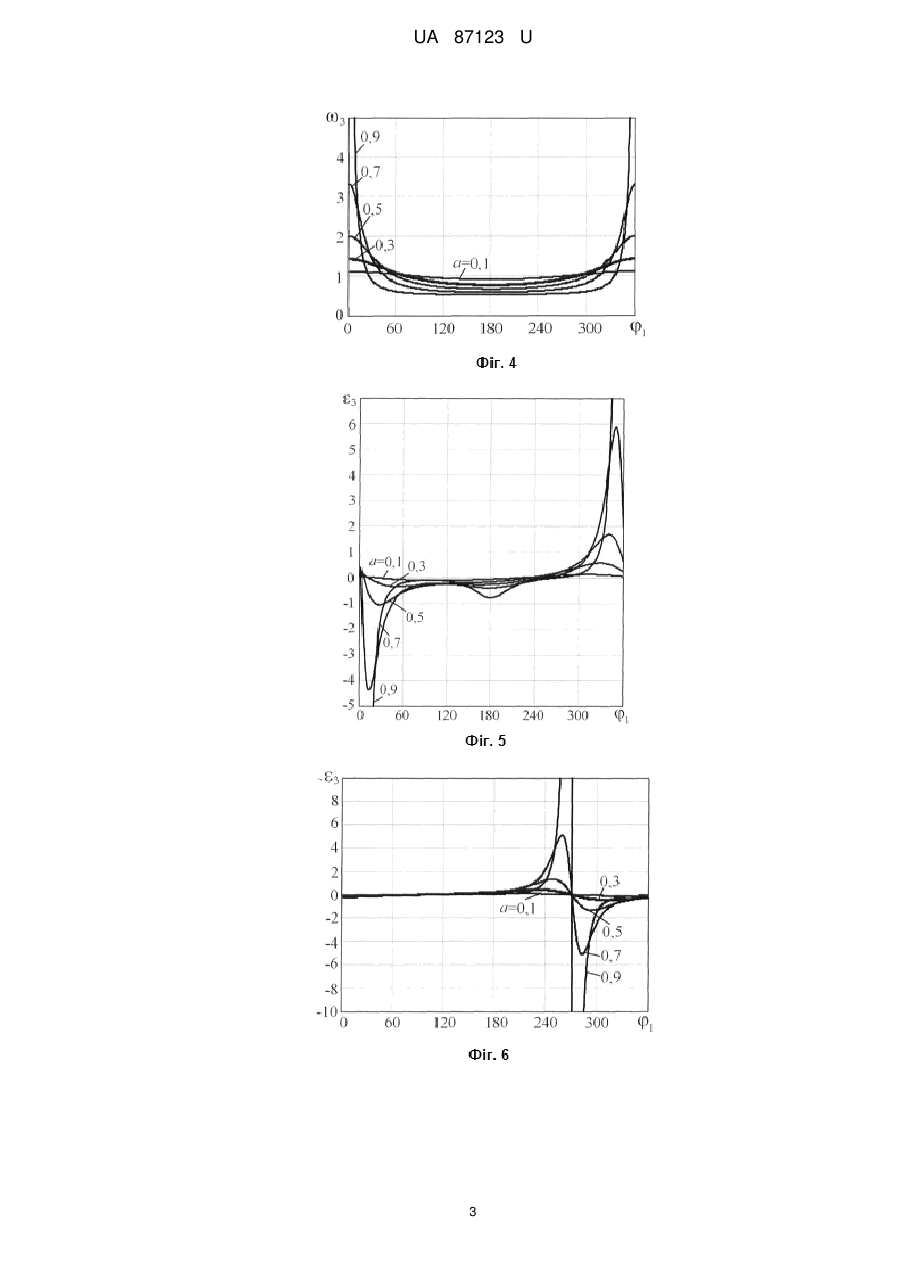
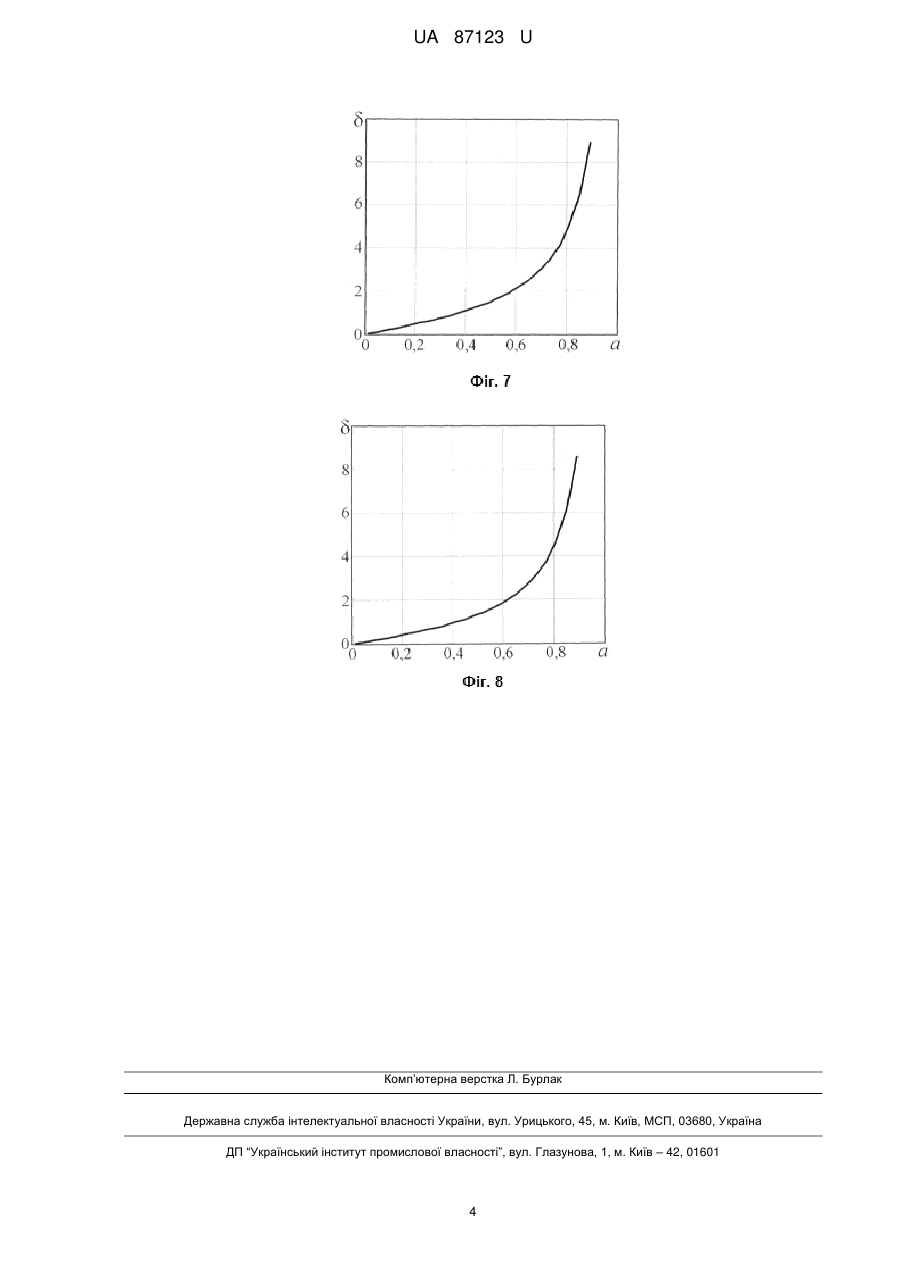
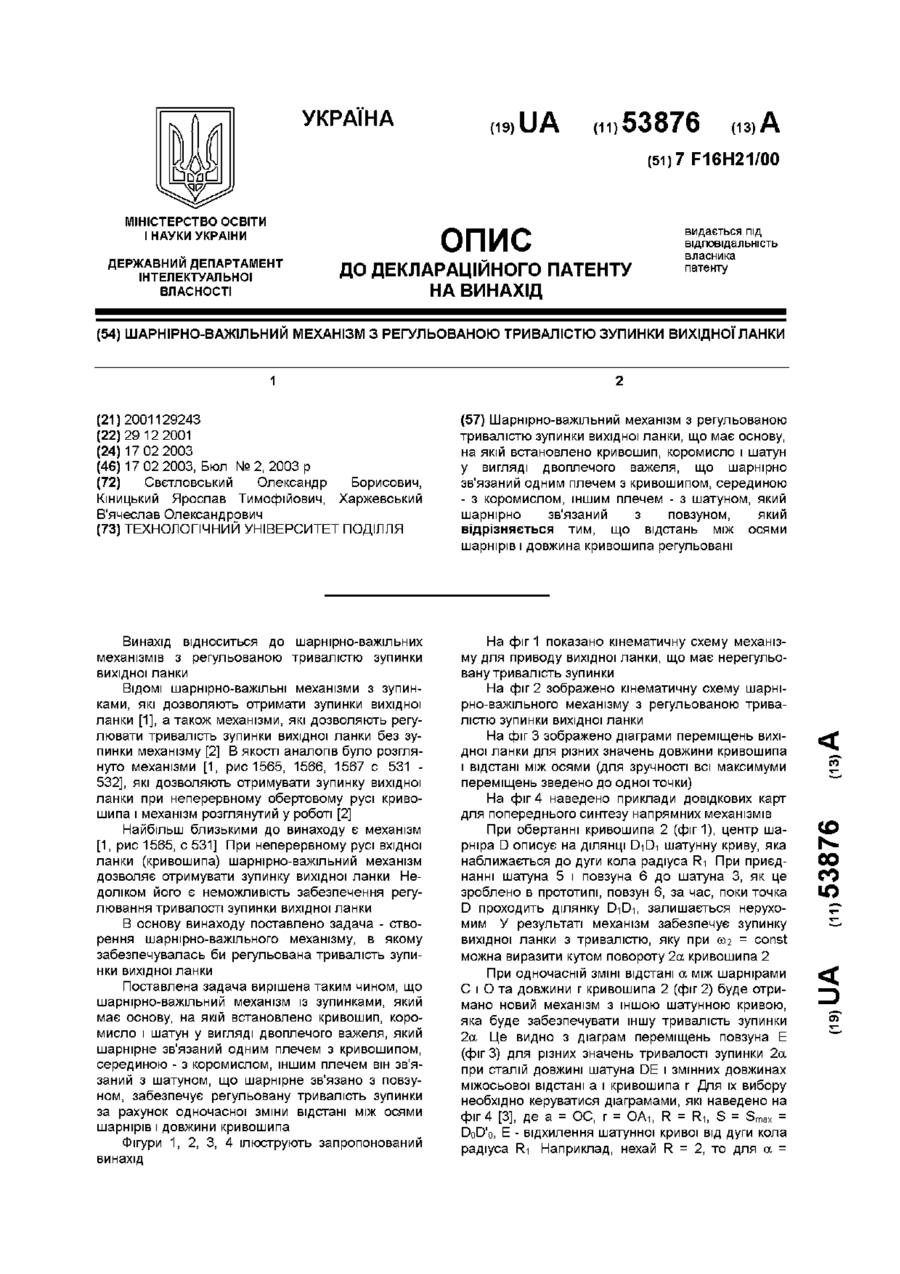
Реферат: Двокривошипні чотириланкові важільні механізми з регульованою амплітудою коливання кутової швидкості вихідної ланки складаються з трьох рухомих ланок, причому, якщо b>а (де a міжосьова відстань, b - довжина кривошипа), то вхідна ланка-кривошип і вихідна ланка, які з'єднані проміжною ланкою, здійснюють обертовий рух зі змінним передаточним відношенням, амплітуда коливання вихідної ланки при сталій швидкості кривошипа залежить від співвідношення b:а. При цьому в механізмах встановлена гвинтова передача, яка дозволяє змінювати міжосьову відстань між центрами обертання вхідної та вихідної ланок. UA 87123 U (54) ДВОКРИВОШИПНІ ЧОТИРИЛАНКОВІ ВАЖІЛЬНІ МЕХАНІЗМИ З РЕГУЛЬОВАНОЮ АМПЛІТУДОЮ КОЛИВАННЯ КУТОВОЇ ШВИДКОСТІ ВИХІДНОЇ ЛАНКИ UA 87123 U UA 87123 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до машинобудування, а саме до механізмів обертового руху, де потрібно забезпечити при рівномірному обертанні вхідної ланки нерівномірне обертання вихідної ланки. Відомі механізми, які дозволять одержати нерівномірний обертовий рух вихідної ланки [1]. До таких механізмів належать зубчасті механізми з некруглими колесам [1, рис. 3.27-3.28], які мають у своєму складі вищу кінематичну пару і складні у виготовленні, та важільні механізми [1, с. 158; рис. 2.57, с. 77; рис. 2.69, с. 79]. Більш прості у виготовленні є важільні механізми. Найбільш близькими за технічною суттю і принципом роботи до пристрою, що пропонується, є двокривошипний чотириланковий важільний механізм [1, рис. 2.57, с. 77] та двокривошипний кулісний механізм [1, рис. 2.69, с. 79] (аналоги), в яких міжосьова відстань а менша довжини кривошипа b. Проте такі механізми не дозволяють змінювати амплітуду коливання швидкості вихідної ланки. В основу корисної моделі поставлена задача - розширення конструктивних і функціональних можливостей вказаних механізмів і створення простих за конструкцією передаточних механізмів обертового руху, які забезпечують регулювання амплітуди коливання вихідної ланки з однаковими напрямками обертання вхідної і вихідної ланок. Поставлена задача вирішується таким чином, що в двокривошипному чотириланковому важільному механізмі або двокривошипному кулісному механізмі, які складаються з трьох рухомих ланок, причому, якщо b>а, то вхідна ланка-кривошип 1 і вихідна ланка 3, які здійснюють обертовий рух зі змінним передаточним відношенням за один оберт цих ланок, амплітуди коливання вихідної ланки при сталій швидкості кривошипа залежать від співвідношення b:а; згідно з корисною моделлю, змінюючи це співвідношення можна регулювати амплітуду коливань швидкості куліси, конструктивно більш просто регулювати міжосьову відстань, у цьому випадку таке регулювання можна здійснювати навіть під час руху механізму, такі механізми легко вписуються в системи автоматичного керування машин. На фіг. 1 і 2 зображено загальні види запропонованих механізмів - двокривошипного чотириланкового важільного механізму (фіг. 1) та двокривошипного. кулісного механізму (фіг. 2) з регульованою амплітудою коливання кутової швидкості вихідної ланки, на фіг. 3-8 - його різні кінематичні схеми, а саме: фіг. 3 - діаграми кутових швидкостей ланки 3 двокривошипного -1 чотириланкового важільного механізму (ω1=1 с , b=1); фіг. 4 - діаграми кутових швидкостей -1 ланки 3 двокривошипного кулісного механізму (ω1=1 с , b=1); фіг. 5 - діаграми кутових -1 прискорень ланки 3 двокривошипного чотириланкового важільного механізму (ω 1=1 с , b=1); фіг. 6 - діаграми кутових прискорень ланки 3 двокривошипного чотириланкового важільного -1 механізму (ω1=1 с , b=1); фіг. 7 - діаграми зміни коефіцієнта нерівномірності руху ланки 3 -1 двокривошипного кулісного механізму (ω1=1 с , b=1); фіг. 8 - діаграми зміни коефіцієнта -1 нерівномірності руху ланки 3 двокривошипного кулісного механізму (ω 1=1 с , b=1). Механізми складаються із стояка 0, кривошипа 1, шатуна (фіг. 1) або повзуна 2 (фіг. 2), ланки 3, яка є другим кривошипом, рухомої опори 4, положення якої регулюється гвинтом 5, що дозволяє змінювати міжосьову відстань а. Механізм буде двокривошипним при умові, якщо а знаходиться в межах 0
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 25/16, F16H 25/00
Мітки: вихідної, ланки, амплітудою, регульованою, чотириланкові, важільні, кутової, механізмі, двокривошипні, коливання, швидкості
Код посилання
<a href="https://ua.patents.su/6-87123-dvokrivoshipni-chotirilankovi-vazhilni-mekhanizmi-z-regulovanoyu-amplitudoyu-kolivannya-kutovo-shvidkosti-vikhidno-lanki.html" target="_blank" rel="follow" title="База патентів України">Двокривошипні чотириланкові важільні механізми з регульованою амплітудою коливання кутової швидкості вихідної ланки</a>
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки
Номер патенту: 53876
Опубліковано: 17.02.2003
Автори: Свєтловський Олександр Борисович, Харжевський В'ячеслав Олександрович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: регульованою, ланки, шарнірно-важільний, тривалістю, зупинки, вихідної, механізм
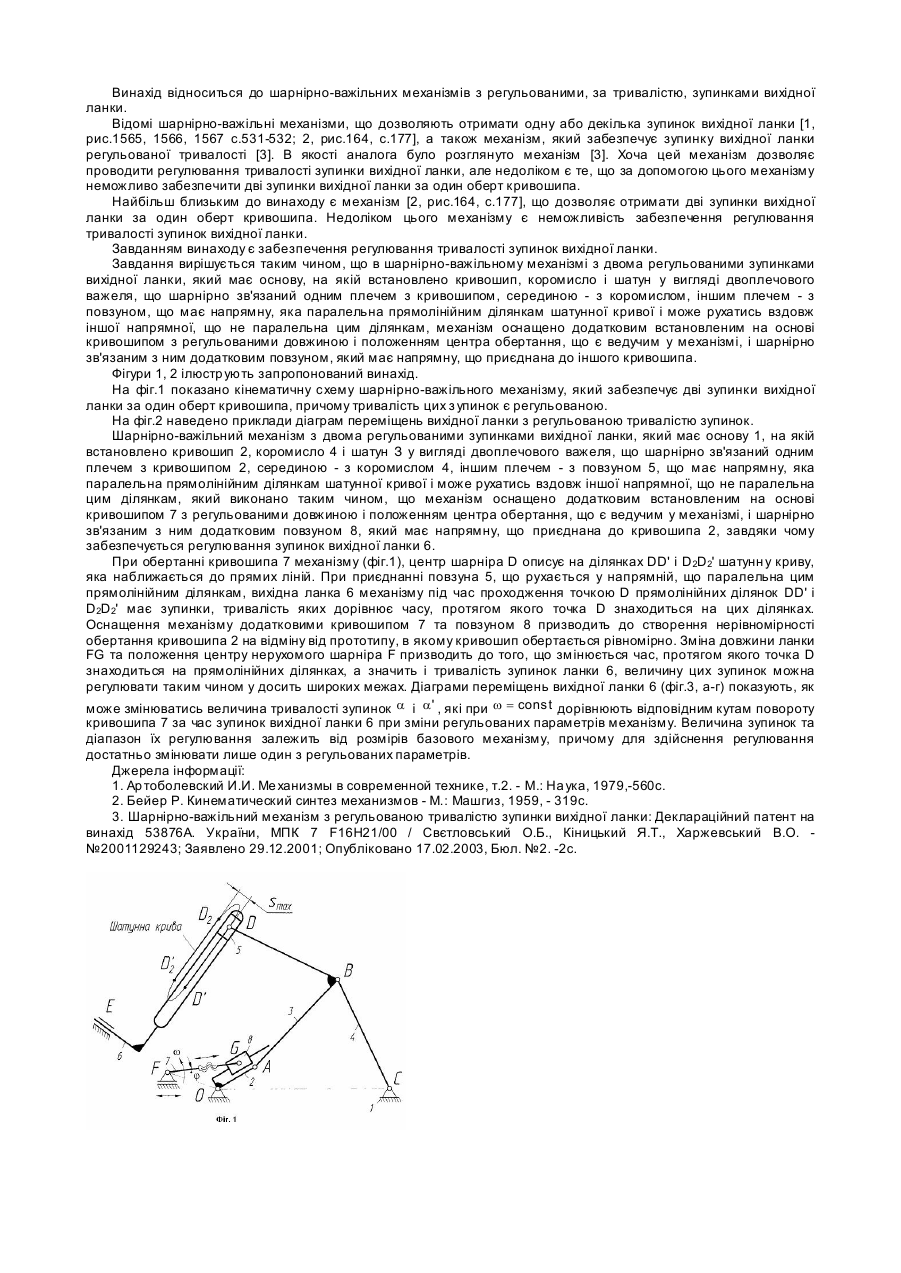
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з шатуном, який шарнірно зв'язаний з повзуном, який відрізняється тим, що відстань між осями шарнірів і довжина кривошипа регульовані.
Шарнірно-важільний механізм з двома регульованими зупинками вихідної ланки
Номер патенту: 66042
Опубліковано: 15.04.2004
Автори: Кіницький Ярослав Тимофійович, Харжевський В'ячеслав Олександрович
МПК: F16H 21/00
Мітки: зупинками, шарнірно-важільний, ланки, механізм, регульованими, двома, вихідної
Формула / Реферат:
Шарнірно-важільний механізм з двома регульованими зупинками вихідної ланки, який має основу, на якій встановлений кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з повзуном, що має напрямну, яка паралельна прямолінійним ділянкам шатунної кривої і може рухатись вздовж іншої напрямної, що не паралельна цим ділянкам, який відрізняється тим, що...
Механізм сидорів для претворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання
Номер патенту: 47287
Опубліковано: 17.06.2002
Автори: Сидор Богдан Володимирович, Сидор Ольга Богданівна, Сидор Андрій Володимирович
МПК: F16H 21/48
Мітки: претворення, нерівномірне, механізм, сидорів, рівномірного, амплітудою, швидкості, обертання, регульованою
Формула / Реферат:
Механізм для перетворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання, який складається з нерухомого корпусу, рухомого корпусу з отвором, кільця, розміщеного в отворі рухомого корпусу з можливістю обертання, двох пальців, закріплених на кільці, двох розміщених концентрично в кільці і рухомому корпусі першого суцільного і другого порожнистого валів, двох важелів, закріплених жорстко на першому...
Пристрій поступально-реверсивного переміщення вихідної ланки
Номер патенту: 98599
Опубліковано: 25.05.2012
Автори: Чехман Ярослав Іванович, Пилип Роман Васильович, Шустикевич Андрій Іванович
МПК: F16H 27/00
Мітки: вихідної, поступально-реверсивного, ланки, пристрій, переміщення
Формула / Реферат:
Пристрій поступально-реверсивного переміщення вихідної ланки, який включає привідний вал (1), кривошип (2), ролик (4), ведений вал (9) і кулісу, який відрізняється тим, що додатково містить кривошип (3) з роликом (5), який зв'язаний з кривошипом (1) зубчастою передачею (10), а куліса являє собою раму (6), яка через зубчасту передачу (7-8) приводить в рух ведений вал (9).
Зубчасто-важільний механізм з зупинкою вихідної ланки
Номер патенту: 83211
Опубліковано: 27.08.2013
Автори: Кошель Сергій Олександрович, Музичишин Сергій Володимирович
МПК: F16H 21/00
Мітки: ланки, зупинкою, механізм, зубчасто-важільний, вихідної
Формула / Реферат:
1. Зубчасто-важільний механізм з зупинкою вихідної ланки, що містить корпус, в якому встановлені ведучий та ведений вали, на кожному з яких встановлена пара зубчастих коліс, в кожній по одному колесу закріплено жорстко та з їх зачепленням між собою, ведучий кривошип, закріплений на веденому валу, ведений кривошип, закріплений з зубчастим колесом ведучого вала, та два шатуни, шарнірно з'єднаних між собою і з відповідними кривошипами, який...
Попередній патент: Спосіб одночасної індикації днк мікоплазм та рнк вірусів діареї врх з подальшою ідентифікацією 1 та 2 генотипу збудника вірусної діареї за допомогою плр
Наступний патент: Газоочисний контактний плівковий теплообмінний апарат для утилізації теплоти відхідних газів
Випадковий патент: Дозатор сипких матеріалів