Компенсуючий пристрій нерівномірності навантаження штампа
Номер патенту: 88366
Опубліковано: 11.03.2014
Автори: Запорожченко Анна Віталіївна, Ященко Артем Олександрович, Запорожченко Віталій Сергійович, Пузік Роман Вікторович
Формула / Реферат
Компенсуючий пристрій нерівномірності навантаження штампа, встановлений на столі преса, який вміщує опорну плиту з розміщеними в ній порожнистим хвостовиком та підп'ятником, спряженими по сферичній поверхні певного радіуса з можливістю переміщення один відносно одного, прокладкою, тілами кочення, пружним кільцем, розташованим по периметру підп'ятника, і пружною прокладкою, розміщеною між гайкою, встановленою на кінці хвостовика,та опорною плитою, який відрізняється тим, що радіус сферичної поверхні компенсуючого пристрою визначається за виразом
![]()
де 0,16 - постійний коефіцієнт;
Рн - номінальне зусилля преса, на столі якого встановлено компенсуючий пристрій;
h - висота сферичної поверхні компенсуючого пристрою;
[р] - допустимий питомий тиск для матеріалу хвостовика або підп'ятника даного компенсуючого пристрою.
Текст
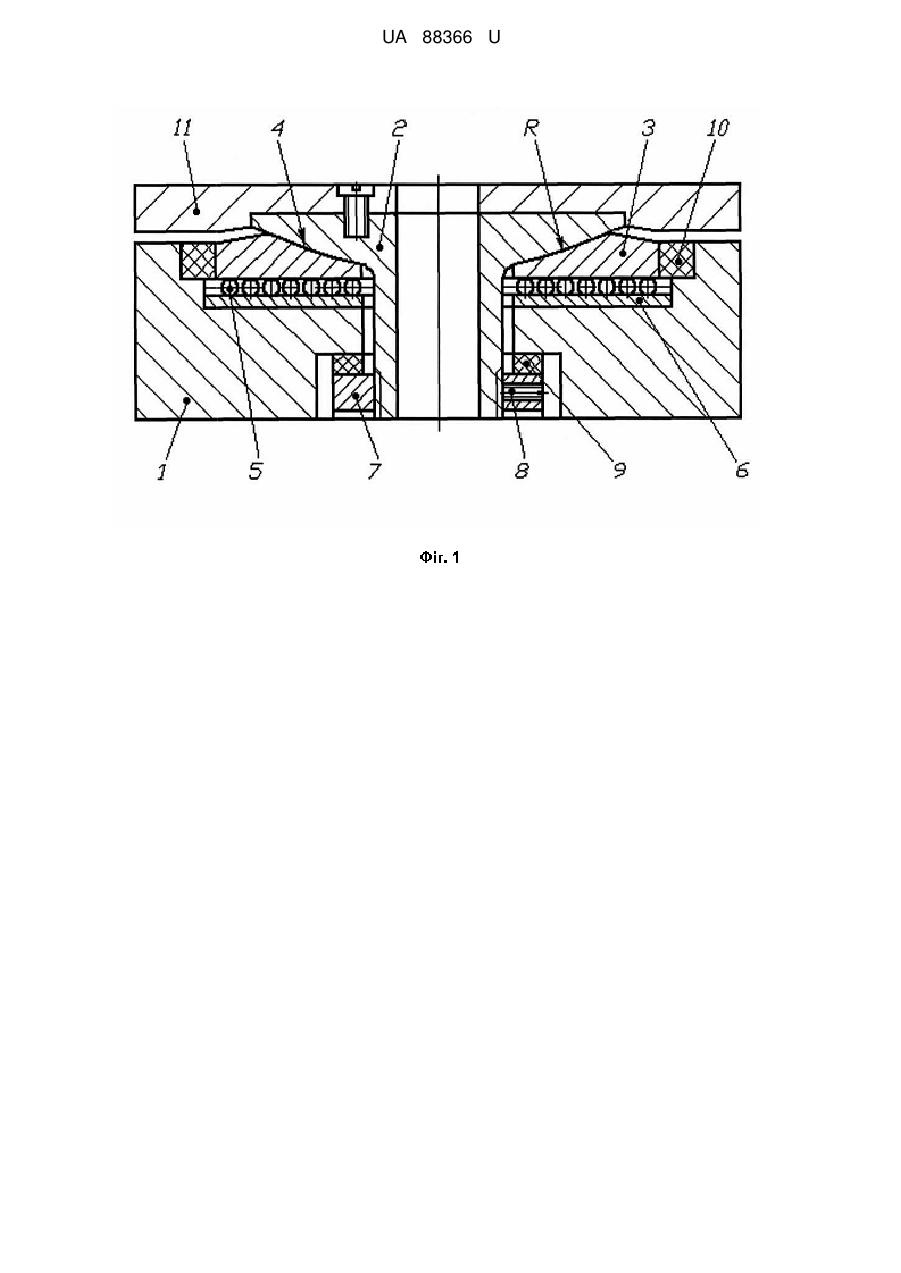
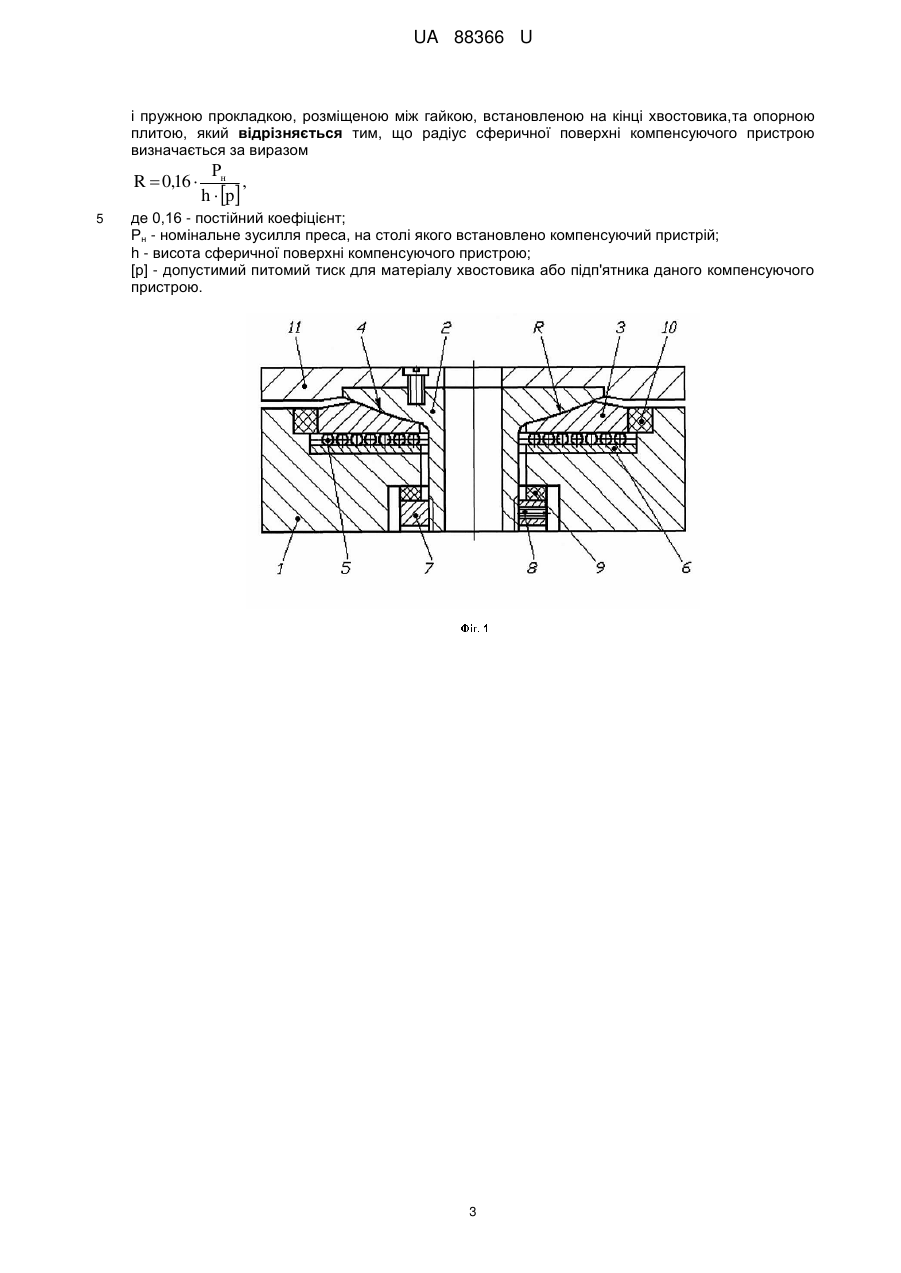
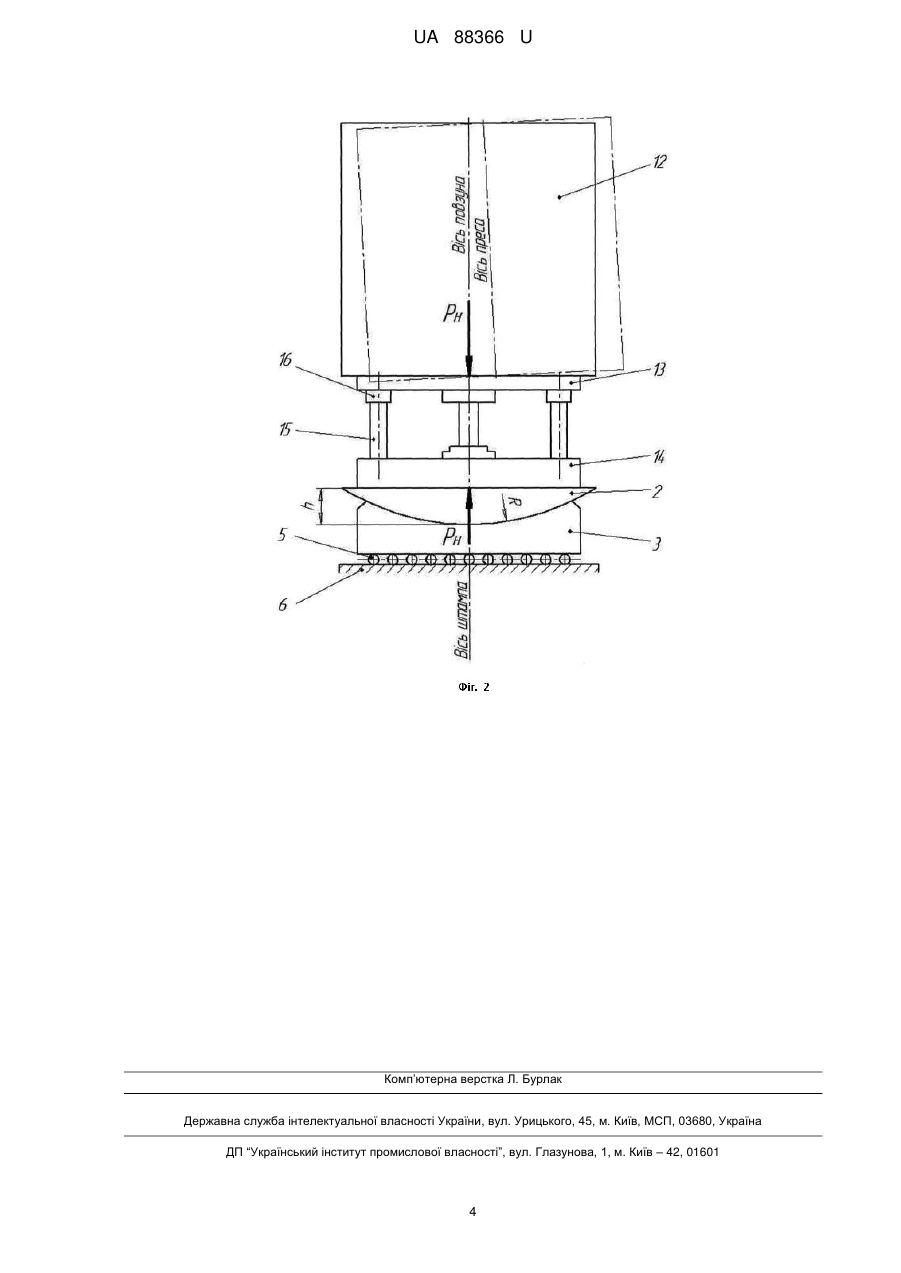
Реферат: Компенсуючий пристрій нерівномірності навантаження штампа, встановлений на столі преса, який вміщує опорну плиту з розміщеними в ній порожнистим хвостовиком та підп'ятником, спряженими по сферичній поверхні певного радіуса з можливістю переміщення один відносно одного, прокладкою, тілами кочення, пружним кільцем, розташованим по периметру підп'ятника, і пружною прокладкою, розміщеною між гайкою, встановленою на кінці хвостовика,та опорною плитою. Радіус сферичної поверхні компенсуючого пристрою визначається за виразом R 0,16 н , h p де 0,16 - постійний коефіцієнт; Рн - номінальне зусилля преса, на столі якого встановлено компенсуючий пристрій; h - висота сферичної поверхні компенсуючого пристрою; [р] - допустимий питомий тиск для матеріалу хвостовика або підп'ятника даного компенсую-чого пристрою. UA 88366 U (54) КОМПЕНСУЮЧИЙ ПРИСТРІЙ НЕРІВНОМІРНОСТІ НАВАНТАЖЕННЯ ШТАМПА UA 88366 U UA 88366 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі обробки металів тиском, а саме, до листового штампування, і може бути використана для компенсації похибок виготовлення, зношення рухомих деталей та пружних деформацій опорних вузлів ковальсько-пресового устаткування. Широко відомі механічні компенсуючі пристрої нерівномірності навантаження штампів, встановлених на столі преса, переважно для операцій вирубування та пробивання, які складаються з опорної плити з розміщеними у ній порожнистим хвостовиком та підп'ятником, спряженими по сферичній поверхні з можливістю переміщення один відносно одного, прокладкою, тілами кочення, пружним кільцем, розташованим по периметру підп'ятника, і пружною прокладкою, розміщеною між гайкою, встановленою на кінці хвостовика, та опорною плитою (див. авторське свідоцтво № 1428593, М. кл. В 30 В 15/00; В 21 D 37/00, 1988). Недоліками відомих механічних компенсуючих пристроїв є низька стійкість і довговічність роботи через невизначеність розмірів сферичних поверхонь їх основних деталей: хвостовика та підп'ятника, у залежності від номінального зусилля преса і виду технологічної операції штампування. Відомий також механічний компенсуючий пристрій нерівномірності навантаження штампа, прийнятий за найближчий аналог, що має опорну плиту з розміщеними у ній порожнистим хвостовиком та підп'ятником, спряженими по сферичній поверхні певного радіуса з можливістю переміщення один відносно одного, прокладкою, тілами кочення, пружним кільцем, розташованим по периметру підп'ятника, і пружною прокладкою, розміщеною між гайкою, встановленою на кінці хвостовика, та опорною плитою. Радіус сферичної поверхні компенсуючого пристрою визначено з кінематичної умови одночасного кутового повороту та лінійного зміщення його рухомих шарнірних з'єднань (див. авторське свідоцтво № 1613361, М. кл. В 30В 15/00; В 21 D 37/00, 1990). Недоліками найближчого аналогу є недостатня надійність роботи при великих навантаженнях штампування, наприклад рівних номінальному зусиллю преса, так як радіус сферичної поверхні компенсуючого пристрою визначено з кінематичних умов роботи, а не з умов міцності його деталей. В основу корисної моделі поставлена задача підвищення надійності роботи і довговічності компенсуючого пристрою, радіус сферичної поверхні якого визначено за умовою її міцності. Поставлена задача вирішується тим, що радіус сферичних поверхонь хвостовика та підп'ятника, спряжених між собою, визначається з умови збереження їх цілісності (міцності) при навантаженні компенсуючого пристрою номінальним (найбільшим) зусиллям преса: R 0,16 н , h p де 0,16 - постійний коефіцієнт; Рн - номінальне зусилля преса, на столі якого встановлено компенсуючий пристрій; h - висота сферичної поверхні заявленого компенсуючого пристрою; [р] - допустимий питомий тиск для матеріалу хвостовика або підп'ятника даного компенсуючого пристрою. Сукупність ознак, що пропонується у формулі корисної моделі, забезпечує отримання нового, невідомого раніше результату у вигляді підвищення надійності роботи механічного компенсуючого пристрою нерівномірності навантаження штампа за рахунок визначення радіуса сферичних поверхонь його основних деталей - хвостовика та підп'ятника з умови збереження їх цілісності (міцності) при навантаженні номінальним (найбільшим) зусиллям преса. Корисна модель пояснюється кресленнями, де на фіг. 1 наведено поздовжній розріз заявленого компенсуючого пристрою нерівномірності навантаження штампа, на фіг. 2 - схема навантаження штампа, встановленого на цьому компенсуючому пристрої. Компенсуючий пристрій нерівномірності навантаження штампа складається (фіг. 1) з опорної плити 1, в якій змонтовано хвостовик 2, спряжений з підп'ятником 3 по сферичній поверхні 4. Підп'ятник 3 встановлено на тілах кочення 5, розміщених на прокладці 6. На кінці хвостовика 2 встановлено гайку 7, яку закріплено гвинтом 8, а між гайкою 7 та опорною плитою 1 розташовано пружну прокладку 9. Пружне кільце 10 встановлено також по периметру підп'ятника 3. Крім того, до хвостовика 2 згори прикріплено плиту 11. Радіус R спряжених сферичних поверхонь хвостовика 2 та підп'ятника 3 виконано строго визначеної величини, яку означено за допомогою математичного виразу, що отримано з умови збереження міцності цих сферичних поверхонь при навантаженні штампа, встановленого на компенсуючому пристрої, номінальним зусиллям преса. Розрахункову схему приведено на фіг. 2. До повзуна 12 преса прикріплено верхню половину 13 штампа, нижню половину 14 якого встановлено на плиті 11 компенсатора (див. фіг. 1). Хвостовик 2 спряжено по сферичній поверхні радіусом R з підп'ятником 3, який, у свою чергу, встановлено на тілах кочення 5, 1 UA 88366 U 5 10 15 20 25 30 35 40 45 50 розміщених на прокладці 6 компенсуючого пристрою. Верхня та нижня половини штампа з'єднанні між собою напрямними колонками 15 й напрямними втулками 16. Під час робочого ходу повзуна преса вниз і виконання технологічної операції штампування (вирубування, пробивання, відрізання, просікання тощо) штамп і компенсуючий пристрій навантажені технологічним зусиллям, величина якого може досягати номінального (найбільшого) зусилля преса Рн. Під дією цього зусилля в місці контакту сферичних поверхонь хвостовика 2 та підп'ятника 3 виникає питомий тиск р, величина якого не повинна перевищувати допустимого значення [р]: н p н p F 2 R h , де F - площа спряжених сферичних поверхонь, яка визначається за формулою: F 2 R h, де R-радіус сферичної поверхні спряжених хвостовика та підп'ятника; h - висота сферичної поверхні; [р] - допустимий питомий тиск на сферичній поверхні хвостовика або підп'ятника, в залежності від міцності матеріалу, з якого їх виготовлено. Вибирається менший допустимий питомий тиск, що витримує хвостовик 2 або підп'ятник 3 при умові виготовлення їх з різних матеріалів, наприклад, хвостовика 2 - зі сталі, а підп'ятника 3 - з бронзи. Звідси радіус сферичної поверхні механічного компенсуючого пристрою визначається за виразом R 0,16 н , h p де 0,16 - постійний коефіцієнт, який отримано при арифметичних діях з постійними членами вище приведених рівнянь. Компенсуючий пристрій працює наступним чином. Під час робочого ходу повзуна 12 униз і виконання технологічної операції штампування на компенсуючий пристрій через штамп передається номінальне зусилля преса Р н. Це зусилля діє на сферичні поверхні 4 хвостовика 2 та підп'ятника 3, але їх цілісність не порушується, так як радіус R цих поверхонь визначено з умови їх міцності, коли напруження р, що виникають на сферичній поверхні 4, не перевищують допустимого напруження [р]. Тоді хвостовик 2 повертається відносно підп'ятника 3 у вертикальній площині та переміщується разом з підп'ятником 3 по тілах кочення 5 у горизонтальній площині, доки нижня половина 14 штампа не розміститься точно напроти верхньої половини 13. Після завершення технологічної операції штампування при поверненні повзуна 12 преса у верхнє положення компенсуючий пристрій розвантажується і під дією сил пружності прокладки 9 й кільця 10 хвостовик 2 та підп'ятник 3 повертаються у вихідне (початкове) положення. Таким чином, при використанні заявленого механічного компенсуючого пристрою забезпечується суттєве підвищення надійності його роботи при великих навантаженнях штампування, які досягають номінального зусилля преса Р н , так як радіус R сферичної поверхні компенсуючого пристрою визначено з умов міцності його деталей. Запропонована у формулі корисної моделі сполука основних ознак забезпечує якісно нову конструкцію механічного компенсуючого пристрою, яка є недосяжною при традиційному рішенні. Конструкція компенсуючого пристрою не є очевидною для спеціалістів і вносить нові можливості в процес проектування сучасного штампувального оснащення. Перелічені відмінні суттєві ознаки заявленої корисної моделі забезпечують позитивний ефект у вигляді підвищення надійності роботи механічного компенсуючого пристрою. Заявлена корисна модель може знайти застосування в галузі обробки металів тиском, а саме, при листовому штампуванні як нової конструкції механічних компенсуючих пристроїв нерівномірності навантаження штампів. Техніко-економічні переваги запропонованого компенсуючого пристрою полягають у підвищенні його надійності, стійкості та довговічності роботи при великих навантаженнях штампування і зменшенні витрат на ремонт. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Компенсуючий пристрій нерівномірності навантаження штампа, встановлений на столі преса, який вміщує опорну плиту з розміщеними в ній порожнистим хвостовиком та підп'ятником, спряженими по сферичній поверхні певного радіуса з можливістю переміщення один відносно одного, прокладкою, тілами кочення, пружним кільцем, розташованим по периметру підп'ятника, 2 UA 88366 U і пружною прокладкою, розміщеною між гайкою, встановленою на кінці хвостовика,та опорною плитою, який відрізняється тим, що радіус сферичної поверхні компенсуючого пристрою визначається за виразом R 0,16 5 н , h p де 0,16 - постійний коефіцієнт; Рн - номінальне зусилля преса, на столі якого встановлено компенсуючий пристрій; h - висота сферичної поверхні компенсуючого пристрою; [р] - допустимий питомий тиск для матеріалу хвостовика або підп'ятника даного компенсуючого пристрою. 3 UA 88366 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюZaporozhchenko Vitalii Serhiiovych, Zaporozhchenko Anna Vitaliivna
Автори російськоюЗапорожченко Виталий Сергеевич, Запорожченко Анна Витальевна
МПК / Мітки
МПК: B30B 15/00, B21D 37/00
Мітки: нерівномірності, компенсуючий, навантаження, пристрій, штампа
Код посилання
<a href="https://ua.patents.su/6-88366-kompensuyuchijj-pristrijj-nerivnomirnosti-navantazhennya-shtampa.html" target="_blank" rel="follow" title="База патентів України">Компенсуючий пристрій нерівномірності навантаження штампа</a>
Компенсатор нерівномірності навантаження штампа
Номер патенту: 58333
Опубліковано: 11.04.2011
Автори: Мірзак Володимир Якович, Боков Віктор Михайлович
МПК: B30B 15/00
Мітки: штампа, нерівномірності, компенсатор, навантаження
Формула / Реферат:
Компенсатор нерівномірності навантаження штампа, що включає в себе інструментальну плиту зі сферичною рухомою опорою, проміжну плиту з плоскою рухомою опорою та корпус з пристроєм рухомого з'єднання його з інструментальною плитою, який відрізняється тим, що проміжну плиту виконано у вигляді упорного підшипника ковзання з конічною зовнішньою допоміжною поверхнею; проміжна плита занурена у масляну ванну, яка утворена в корпусі так, що донна її...
Компенсатор нерівномірності навантаження штампа

Номер патенту: 69662
Опубліковано: 10.05.2012
Автори: Мірзак Володимир Якович, Боков Віктор Михайлович
МПК: B30B 15/00
Мітки: штампа, нерівномірності, компенсатор, навантаження
Формула / Реферат:
Компенсатор нерівномірності навантаження штампа, що включає в себе корпус з вмонтованим в ньому механізмом повороту та лінійного переміщення інструментальної плити для кріплення верхньої частини штампа, який відрізняється тим, що корпус виконано у вигляді траверси прес-автомата з нижнім приводом, інструментальна плита орієнтована робочою поверхнею униз та має центральний вертикальний отвір для базування за центрошукачем штампа, а механізм...
Компенсатор нерівномірності навантаження штампа
Номер патенту: 35305
Опубліковано: 10.09.2008
Автори: Боков Віктор Михайлович, Мірзак Володимир Якович
МПК: B30B 15/28
Мітки: штампа, компенсатор, нерівномірності, навантаження
Формула / Реферат:
Компенсатор нерівномірності навантаження штампа, що містить інструментальну плиту зі сферичною рухомою опорою, проміжну плиту з плоскою рухомою опорою та корпус з пристроєм рухомого з'єднання його з інструментальною плитою, який відрізняється тим, що проміжна плита оснащена гідравлічним пристроєм (системою плунжерів) для фіксації інструментальної плити в нерухомому стані від можливого повороту при асиметричному штампуванні та для...
Пристрій для моніторингу деформаційного стану штампа в процесі технологічного навантаження
Номер патенту: 32167
Опубліковано: 12.05.2008
Автори: Мірзак Володимир Якович, Боков Віктор Михайлович
МПК: B30B 15/00
Мітки: штампа, пристрій, процесі, деформаційного, навантаження, моніторингу, технологічного, стану
Формула / Реферат:
Пристрій для моніторингу деформаційного стану штампа в процесі технологічного навантаження, що включає в себе блок контролю деформаційного стану штампового інструмента, блок реєстрації пружних коливань інструмента; блок реєстрації переміщення інструмента, який відрізняється тим, що усі блоки виконано в одному швидкозмінному і компактному вузлі, закрита висота якого не перевищує закриту висоту штампа, а сам вузол виконано з можливістю...
Компенсуючий дефекти бюстгальтер
Номер патенту: 51173
Опубліковано: 15.11.2002
Автори: Савченко Ірина Анатоліївна, Білоусова Галина Георгіївна
МПК: A41C 3/00
Мітки: бюстгальтер, компенсуючий, дефекти
Формула / Реферат:
1. Компенсуючий дефекти бюстгальтер, який має широкі бретелі, чашки та кишеню для протеза, розташовану за однією з чашок, який відрізняється тим, що оснащений прокладкою, розташованою між кишенею і чашкою, та 1-ним - 3-ма посилювачами, зафіксованими на прокладці, що проходять від нижньої зони чашки до середньої її зони.2. Бюстгальтер за п. 1, який відрізняється тим, що прокладка виконана з матеріалу, межа розтягнення якого не перевищує...
Попередній патент: Спосіб лікування дегенеративно-дистрофічних змін міжхребцевого диска
Наступний патент: Спосіб визначення біомаси фітопланктону експрес-методом у рибних ставах півдня україни
Випадковий патент: Барабан для розмелу порошку