Спосіб визначення параметрів поверхні рогівки і ока
Номер патенту: 89321
Опубліковано: 10.04.2014
Автори: Терещенко Микола Федорович, Паткевич Ольга Іванівна, Сугак Олександр Олександрович, Стельмах Наталія Володимирівна
Формула / Реферат
Спосіб визначення параметрів поверхні рогівки і ока, що включає, встановлення вимірювальної марки на фіксовану відстань щодо досліджуваної рогівки, реєстрацію сформованого відображення поверхнею рогівки відображення вимірювальної марки за допомогою приймача випромінювання, вимір координат точок цього зображення і аналітичний розрахунок координат точок поверхні рогівки, причому вимірюють ширину ліній зображення вимірювальної марки і визначають координати центру її зображення, порівнюють ці параметри з координатами точки перерізу оптичної осі з площиною приймача випромінювання, а установку вимірювальної марки стосовно досліджуваної рогівки здійснюють з урахуванням ширини ліній зображення вимірювальної марки і результату порівняння координат, який відрізняється тим, що визначають аберацію, контури поверхні ока, а світловий потік формують системою точкових джерел з однаковою довжиною хвилі.
Текст
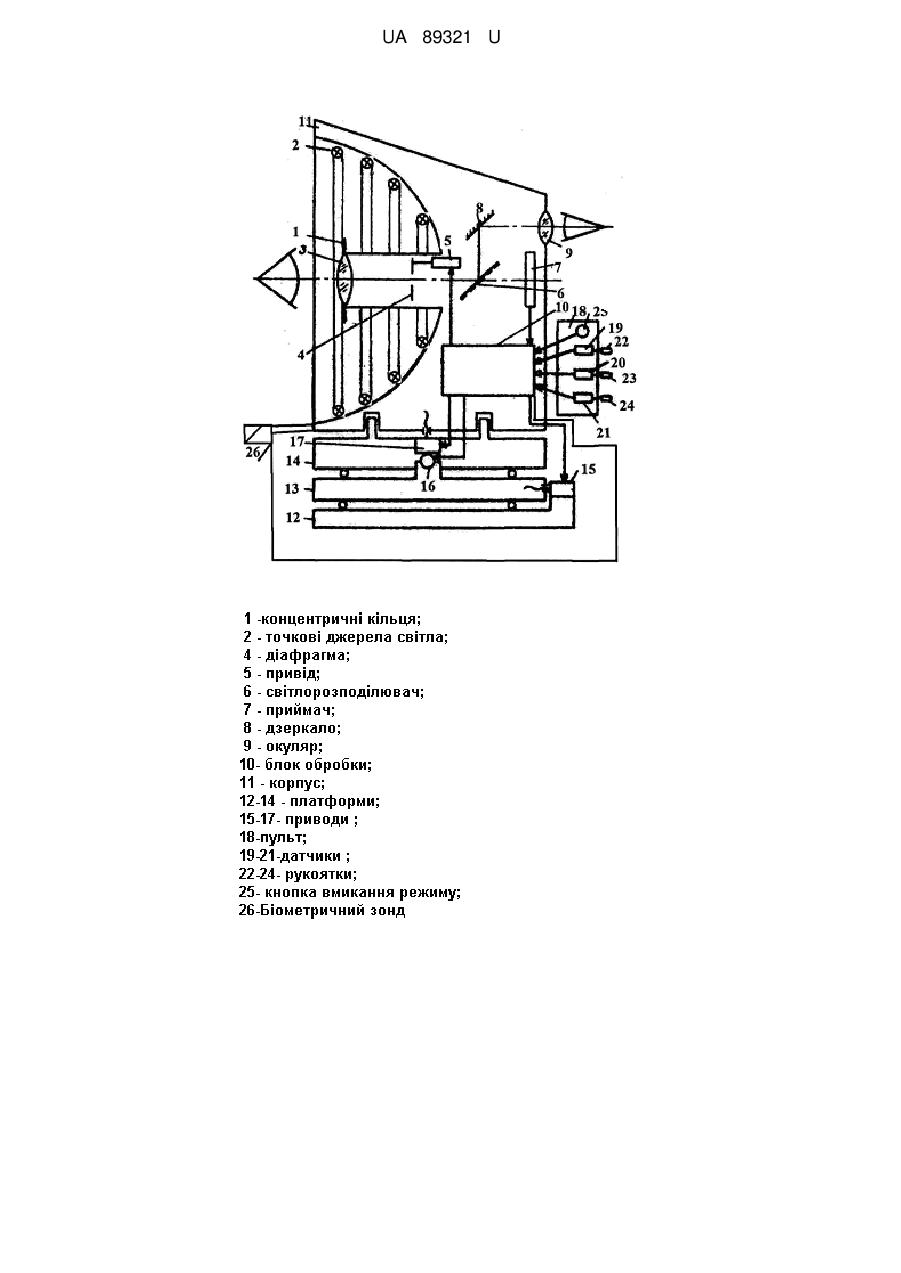
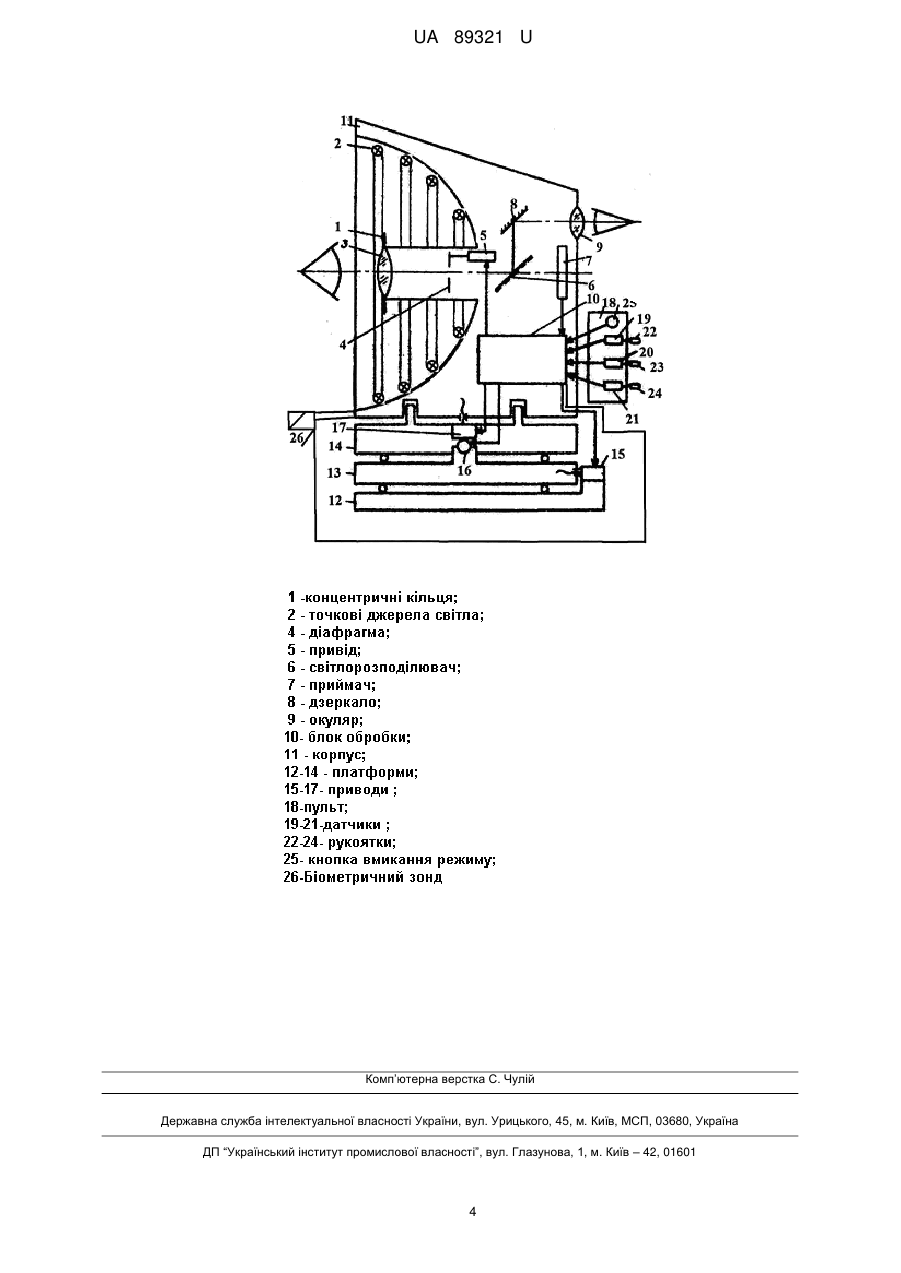
Реферат: Спосіб визначення параметрів поверхні рогівки і ока включає: встановлення вимірювальної марки на фіксовану відстань щодо досліджуваної рогівки, реєстрацію сформованого відображення поверхнею рогівки відображення вимірювальної марки за допомогою приймача випромінювання, вимір координат точок цього зображення і аналітичний розрахунок координат точок поверхні рогівки, причому вимірюють ширину ліній зображення вимірювальної марки і визначають координати центру її зображення, порівнюють ці параметри з координатами точки перерізу оптичної осі з площиною приймача випромінювання, а установку вимірювальної марки стосовно досліджуваної рогівки здійснюють з урахуванням ширини ліній зображення вимірювальної марки і результату порівняння координат. Додатково визначають аберацію, контури поверхні ока, а світловий потік формують системою точкових джерел з однаковою довжиною хвилі. UA 89321 U (12) UA 89321 U UA 89321 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до медичного приладобудування, оптичних медичних приладів, точніше до офтальмологічної діагностичної техніки. Відомий винахід (Авторську свідоцтва СРСР №1115714 Спосіб визначення топографії поверхні рогівки / Карпов А.В., Ківаєв А.А. // опубл. в бюл. № 36, 30.09.1984, МПК А61ВЗ/00) використовується при діагностиці топографії поверхні рогівки, що включає встановлення вимірювальної марки на фіксовану відстань щодо досліджуваної рогівки, реєстрацію сформованого відображення поверхнею рогівки відображення вимірювальної марки за допомогою приймача випромінювання, вимір координат точок цього зображення і аналітичний розрахунок координат точок поверхні рогівки, причому вимірюють ширину ліній зображення вимірювальної марки і визначають координати центру її зображення, порівнюють ці параметри з координатами точки перерізу оптичної осі з площиною приймача випромінювання, а установку вимірювальної марки стосовно досліджуваної рогівки здійснюють з урахуванням ширини ліній зображення вимірювальної марки і результату порівняння координат. Недоліком наведеного технічного рішення є обмежені можливості визначення параметрів зорової системи та похибки в визначенні топографії поверхні рогівки та склери. Задача корисної моделі - розширення функціональних можливостей та зменшення похибки вимірювання параметрів рогівки і ока. В основу нового технічного рішення та корисної моделі поставлена задача розширення функціональних можливостей та зменшення похибки вимірювання параметрів рогівки і ока шляхом забезпечення високоточної порівняльної оцінки параметрів рогівки та ока (топографії, контурів, площ, об'єму та лінійних розмірів). Поставлена задача вирішується за рахунок того, що в новому способі визначення параметрів поверхні рогівки і ока, що включає встановлення вимірювальної марки на фіксовану відстань щодо досліджуваної рогівки, реєстрацію сформованого відображення поверхнею рогівки відображення вимірювальної марки за допомогою приймача випромінювання, вимір координат точок цього зображення і аналітичний розрахунок координат точок поверхні рогівки, причому вимірюють ширину ліній зображення вимірювальної марки і визначають координати центру її зображення, порівнюють ці параметри з координатами точки перерізу оптичної осі з площиною приймача випромінювання, а установку вимірювальної марки стосовно досліджуваної рогівки здійснюють з урахуванням ширини ліній зображення вимірювальної марки і результату порівняння координат, потім визначають аберацію, контури поверхні ока, а світловий потік формують системою точкових джерел з однаковою довжиною хвилі. Суть корисної моделі пояснюються кресленням, де зображена функціональна схема діагностичної системи, що реалізує спосіб визначення параметрів поверхні рогівки і ока. Система для визначення параметрів поверхні рогівки і ока складається з таких основних блоків: 1 - джерело випромінювання; 2 - вимірювальна марка, виконана в вигляді концентричних кілець з точковими джерелами світла; 3 - об'єктив; 4 - регульована діафрагма; 5 - керований привід; 6 - світлорозподілювач; 7 - приймач зображень; 8 - дзеркало; 9 - окуляр; 10 - блок обробки; 11 - корпус; 12-14 - рухомі платформи;. 15-17 - приводи переміщення; 18 - пульт керування; 19-21 - датчики положень; 22-24 - рукоятки керування переміщень; 25 - кнопка перемикання режимів; 26 - біометричний зонд. Діагностична система, що реалізує запропонований спосіб визначення параметрів рогівки і ока працює наступним чином. Діагностична система містить вимірювальну систему, що складається з випромінювача 1точкові джерела (рис. 1), вимірювальну марку, яка виконана у вигляді системи концентричних кілець 2, об’єктива 3, регульованої діафрагми 4, з керованим приводом 5, світлоподілювача 6, приймача зображень в вигляді оптикоелектронного приймача випромінювання 7, дзеркала 8, окуляра 9, блока обробки результатів вимірювання 10. Вимірювальна система розміщена в корпусі 11, який встановлений на рухомих платформах 12-14, які мають приводи 15-17. Керування системою здійснюється за допомогою пульта керування 18, в якому встановленні датчики положень 19-21, поворот яких здійснюється за допомогою рукояток керування переміщень 22-24. На пульту керування 18 є кнопка перемикання режиму роботи системи 25. Пульт керування 18 підключений до мікропроцесорного блока обробки 10. Спосіб здійснюється наступним чином. Око пацієнта, встановлюється в точно координовану передню частину об'єктиву 3. Натиснувши кнопку перемикання режимів 25 - діагностична система переводиться в режим наведення на об'єкт контролю. При цьому регульована діафрагма 4 за допомогою приводу 5 виводиться із області фокусу ходу променів. Джерела випромінювання утворює контур кілець 2. Зображення кілець 2 сформоване відзеркалюючою поверхнею досліджуваної рогівки та 1 UA 89321 U 5 10 15 20 25 30 35 40 45 50 55 60 прилягаючих зон склери, через об'єктив 3 і світлоподілювач 6 проектується на оптикоелектронний приймач 7 випромінювання, і через дзеркало 8 і окуляр 9 контролюється лікаремофтальмологом. Повертаючи рукоятки 22-24 лікар-офтальмолог через датчики 19-21 і вимірювальний блок 10 подає сигнали про величину подовжнього, поперечного та вертикального переміщення вимірювальної системи. Дані сигнали відпрацьовуються приводами 15-17, рухомими платформами 14,13 і корпус 11 діагностичної системи відносно центру ока пацієнта. Критерієм точної установки є отримання чіткого зображення кілець в окулярі 9. Потім натискаючи кнопку 25, діагностичну систему переводять в автоматичний режим визначення параметрів поверхні рогівки і ока. При цьому сигнали з приймача 7 подаються до вимірювального блока обробки 10. Визначається та встановлюється центр зображення. Отримуємо систему імпульсних прямокутних сигналів, просторове розміщення, яких повторює віддзеркалені кільця з рогівки. Приймач 7 забезпечує радіальне сканування зображення відносно встановленого центру рогівки. Блок обробки 10 подає управляючі сигнали на приводи 16, 17, пропорціонально поперечному та вертикальному зміщенням зображення центрального кільця. На привід 15 з блока обробки 10 подається сигнал, який задає невелике переміщення вимірювальної системи в подовжньому напрямку відносно центру досліджуваної рогівки. Звичайно і змінюється ширина центрального кільця. В залежності від отриманих результатом блоком 10 вибирається наступне переміщення вимірювальної системи і подається сигнал на привід 15. Після того як приводи 15-17 відпрацювали дані сигнали - закінчується первинний цикл оцінювання. Після першого і наступних циклів блок обробки 10 перевіряє точність отриманих результатів. Якщо центр кілець і початок координат не перевищує задане значення похибки (0,1%) - процес наведення та підготовки до отримання параметрів рогівки та ока, закінчується. Подовжнє наведення закінчується по отриманню мінімальної середньої ширини центрального кільця. Коли мета з точності (відносна похибка 0,1 %) досягнута - блок обробки 10 дає сигнал на привід 5, який відповідає за установку діафрагми 4 в фокальній площині об'єктива 3. Після цього сигнали з приймача 7 вводяться в блок обробки 10 який обраховує координати точок випромінювачів 2 відносно початку координат. Після цього проводиться завершальне юстирування діагностичної системи. Для отримання завершальних результатів про топографію поверхні рогівки та прилеглих зон склери обчислюються координати точок зображення кілець відносно вимірювальної марки, утвореного при первинній реєстрації рогівки пацієнта та порівнюються з попередньо знайденими при юстируванні діагностичної системи координатами точок зображення кілець, утвореного зразковою сферичною поверхнею. Для вимірювання аберацій, параметрів оптичної системи зору, товщини рогівки та прилеглих зон склери використовується біометричний зонд 26. При даних замірах блок обробки 10 дає сигнал блоку 26 (біометричний зонд) провести первинні тестові заміри параметрів аберацій, оптичної системи зору, товщини рогівки та прилеглих зон склери. В залежності від отриманих результатів блок обробки 10 дає сигнал приводам 15-17для юстирування та проводить кінцевий замір аберацій, параметрів оптичної системи зору, товщини рогівки та прилеглих зон склери. Отримані результати вимірювання надходять в блок обробки 10, порівнюються і при умові заданої точності (відносна похибка 0,1%) формуються завершальні результати. Рішення поставленої задачі запропонованого способу та діагностичної системи, що реалізує спосіб визначення параметрів поверхні рогівки ока досягається шляхом додаткового введення операцій порівняння для отримання дійсних розмірів, контурів, площ, об'ємів та лінійних розмірів ока шляхом встановлення їх різниці,. Це дає можливість контролювати і отримувати дійсні параметри та слідкувати за змінами розмірів. Даний спосіб не залежить від суб'єктивних помилок персоналу діагностичних центрів та лікувальних закладів. Дана система дозволяє визначати параметри поверхні рогівки, склери, вимірює топографію, кривизну поверхні рогівки ока та її товщину, а біометричний зонд оптичні параметри та зону примикання до склери. Така можливість досягається завдяки тому, що спосіб реалізований в діагностичній системі дозволяє визначати оптичні параметри: аберацію, контури поверхні рогівки, склери, зони примикання, товщину рогівки і доповнений біометричним зондом, який вимірює весь комплекс оптичних і біометричних параметрів складових частин зорової системи. Дані функції в такій системі є досить доцільними, так як дозволяють досліджувати деформації рогівки в об'ємній площині , а саме її кривизну, та мати розуміння про ступінь деформації. Ці функції особливо важливі при корекції гостроти зору та других захворюваннях зорової системи. 2 UA 89321 U 5 10 15 20 25 Тобто, таким чином, розширивши функціональні можливості способу та поєднавши діагностичні виміри зорової системи пацієнта і результати дослідження такою діагностичною системою, що реалізує запропонований спосіб дадуть нам повну картину дефектів біометричної і оптичної системи пацієнта. Біометричний зонт змонтований за системою концентричних кілець та направлений на око пацієнта під кутом. Така схема розташування пояснюється тим, що біометричний зонт не повинен перешкоджати відбиванню точкових випромінювачів. Він повинен виміряти всі параметри рогівки та склери, їх товщини, зони примикання без спотворень та похибок в встановленні дійсних значень топографії ока. Технічний результат, який може бути отриманий при реалізації способу, що заявляється, виражається в можливості розширення функціональних можливостей та зменшення похибки вимірювання параметрів рогівки і ока. Таким чином забезпечується суттєве розширення функціональних можливостей та значне (на порядок - до 0,1 %) зменшення похибки вимірювання параметрів рогівки і ока. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб визначення параметрів поверхні рогівки і ока, що включає, встановлення вимірювальної марки на фіксовану відстань щодо досліджуваної рогівки, реєстрацію сформованого відображення поверхнею рогівки відображення вимірювальної марки за допомогою приймача випромінювання, вимір координат точок цього зображення і аналітичний розрахунок координат точок поверхні рогівки, причому вимірюють ширину ліній зображення вимірювальної марки і визначають координати центру її зображення, порівнюють ці параметри з координатами точки перерізу оптичної осі з площиною приймача випромінювання, а установку вимірювальної марки стосовно досліджуваної рогівки здійснюють з урахуванням ширини ліній зображення вимірювальної марки і результату порівняння координат, який відрізняється тим, що визначають аберацію, контури поверхні ока, а світловий потік формують системою точкових джерел з однаковою довжиною хвилі. 3 UA 89321 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюTereschenko Mykola Fedorovych
Автори російськоюТерещенко Николай Федорович
МПК / Мітки
Мітки: визначення, параметрів, поверхні, спосіб, ока, рогівки
Код посилання
<a href="https://ua.patents.su/6-89321-sposib-viznachennya-parametriv-poverkhni-rogivki-i-oka.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів поверхні рогівки і ока</a>
Спосіб визначення параметрів поверхні обертових агрегатів
Номер патенту: 92655
Опубліковано: 25.11.2010
Автори: Шоломицький Андрій Аркадійович, Могильний Сергій Георгійович
МПК: G01B 9/00
Мітки: агрегатів, параметрів, визначення, обертових, спосіб, поверхні
Формула / Реферат:
Спосіб визначення параметрів поверхні обертових агрегатів, який включає вимірювання координат точок електронним тахеометром на поверхні діючого агрегату, який відрізняється тим, що фіксують час моменту вимірювання координат точок електронним тахеометром на поверхні діючого агрегату, а відхилення параметрів поверхні агрегату від проектних визначають з системи рівнянь:
Спосіб визначення оптичних параметрів поверхні твердих тіл
Номер патенту: 40115
Опубліковано: 16.07.2001
Автори: Буршта Ігор Іосифович, Завадський Сергій Миколайович, Венгер Євгеній Федорович
МПК: G01N 21/00
Мітки: оптичних, визначення, тіл, спосіб, поверхні, параметрів, твердих
Формула / Реферат:
Спосіб визначення оптичних параметрів поверхні твердих тіл, що включає встановлення зазору між поверхнею досліджуваного зразка і елементом порушеного повного внутрішнього відбивання, опромінення цієї поверхні р- і s-поляризованим електромагнітним випромінюванням через, елемент порушеного повного внутрішнього відбивання, вимірювання еліпсометричиих кутів y і D, і розвязування основного еліпсометричного рівняння...
Спосіб визначення параметрів шорсткості поверхні у процесі різання
Номер патенту: 36996
Опубліковано: 10.11.2008
Автори: Паткевич Ольга Іванівна, Усачов Петро Антонович
МПК: B23B 25/00
Мітки: шорсткості, визначення, поверхні, різання, спосіб, параметрів, процесі
Формула / Реферат:
Спосіб визначення параметрів шорсткості поверхні деталі у процесі різання на металорізальному верстаті, що включає реєстрацію сигналу акустичної емісії зони обробки і визначення по ньому значень параметрів шорсткості поверхні деталі, який відрізняється тим, що перетворюють аналоговий сигнал акустичної емісії у цифровий, визначають частоту вимірювань, дискретизують цифровий сигнал по періоду вимірів, а параметр Ra шорсткості поверхні деталі,...
Спосіб визначення швидкості змін товщини рогівки
Номер патенту: 81824
Опубліковано: 10.07.2013
Автори: Голубов Костянтин Едуардович, Баринов Едуард Федорович
МПК: A61F 9/00
Мітки: змін, визначення, спосіб, швидкості, товщини, рогівки
Формула / Реферат:
Спосіб визначення швидкості зміни товщини рогівки, який включає вимірювання товщини рогівки, який відрізняється тим, що після вимірювання товщини рогівки проводять інстиляції гіпотонічних крапель, після погіршення зору хворого проводять повторне вимірювання товщини рогівки, фіксують час між двома вимірюваннями та розраховують показник швидкості зміни товщини рогівки за формулою Х=Т2-Т1/t, де X - показник швидкості зміни товщини рогівки, Т1 -...
Спосіб отримання моношару культивованих клітин рогівки на внутрішній поверхні м’яких контактних лінз
Номер патенту: 86892
Опубліковано: 10.01.2014
Автори: Попандопуло Андрій Геннадійович, Іванова Ольга Миколаївна, Кавеліна Ганна Станіславівна, Дрожжіна Галина Іванівна
МПК: A61F 9/00
Мітки: спосіб, клітин, контактних, отримання, рогівки, культивованих, моношару, поверхні, лінз, м'яких, внутрішній
Формула / Реферат:
Спосіб отримання моношару культивованих клітин рогівки на внутрішній поверхні м'яких контактних лінз, який включає ферментативне виділення первинної культури, визначення клітин рогівки, який відрізняється тим, що лімбальні клітини виділяють з зон палісадів Фогта, визначають в їх складі стовбурові клітини, культивування яких здійснюють на внутрішній поверхні силікон-гідрогелевих м'яких контактних лінзах з високою кисневою проникністю.
Попередній патент: Керамофон
Наступний патент: Спосіб діагностики однобічних хронічних гіперпластичних процесів у верхньощелепних синусах
Випадковий патент: Спосіб непрямої оцінки функціонального стану опорно-рухової системи людини