Силова установка безпілотного літального апарата

Формула / Реферат
Силова установка безпілотного літального апарата, яка містить тяговий безколекторний електричний двигун, повітряний гвинт, розташований на валу електричного двигуна, яка відрізняється тим, що додатково мітить двигун внутрішнього згоряння, який використовується як первинне джерело енергії, до ротора якого за допомогою муфти або редуктора приєднаний ротор генератора електроенергії, до вихідних роз'ємів якого приєднані вхідні роз'єми перетворювача електроенергії зі змінного трифазного струму в постійний струм, до вихідних роз'ємів якого послідовно підключено щонайменше один блок управління обертами тягового безколекторного електричного двигуна, а до вихідних роз'ємів даного блока приєднані вхідні роз'єми тягового безколекторного електричного двигуна, причому на вхід блока управління обертами тягового безколекторного електричного двигуна подається сигнал, що задає необхідний режим роботи тягового безколекторного електричного двигуна.
Текст
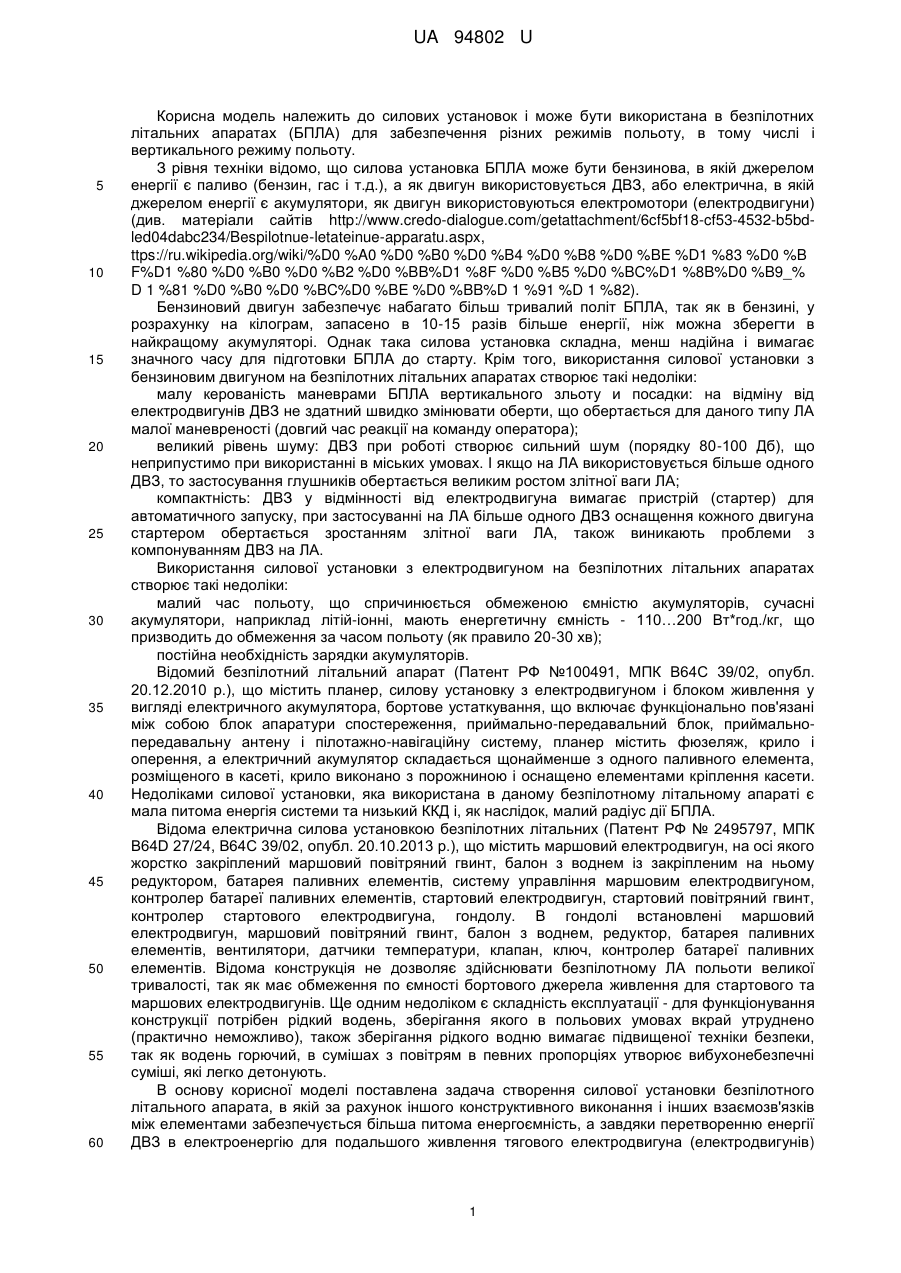
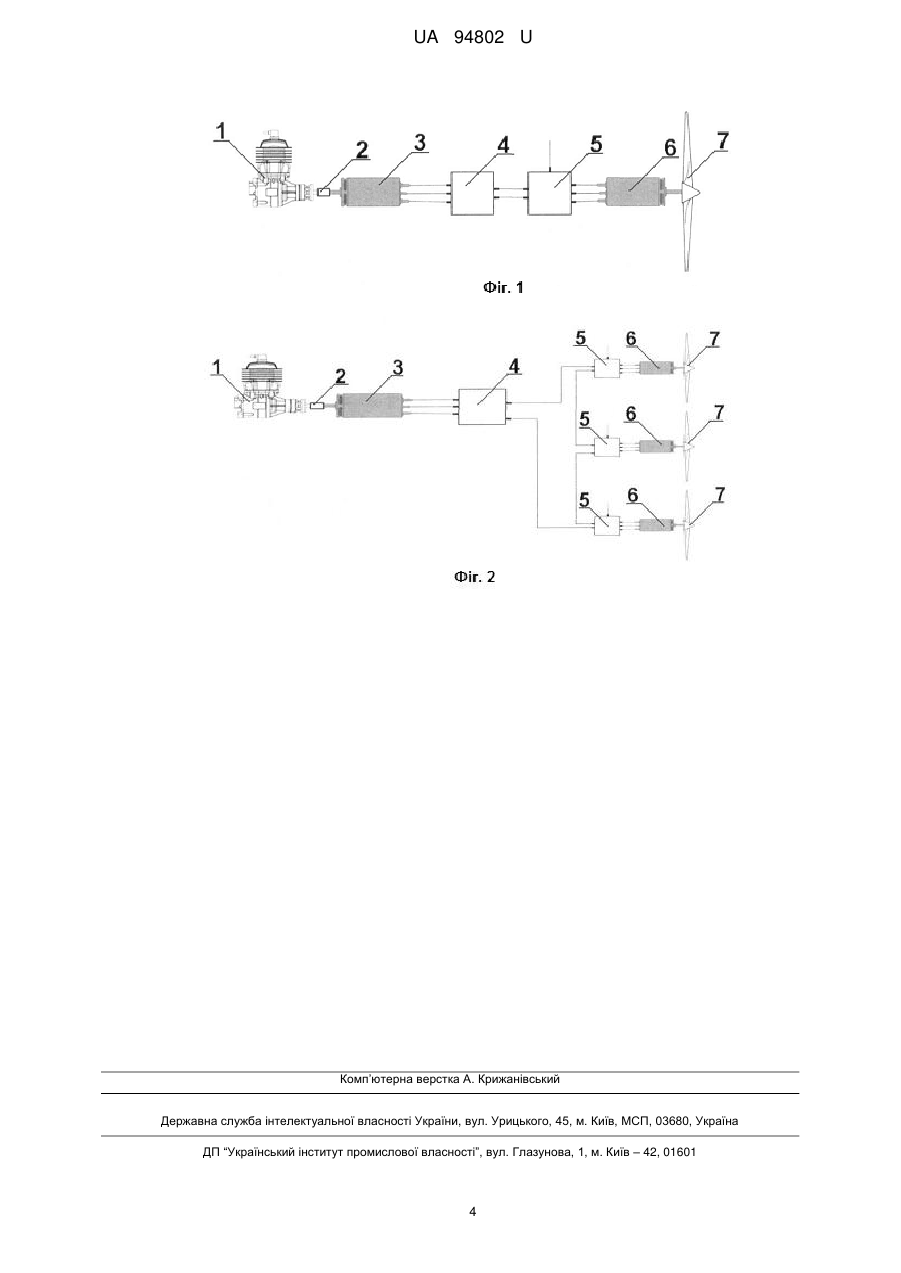
Реферат: UA 94802 U UA 94802 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до силових установок і може бути використана в безпілотних літальних апаратах (БПЛА) для забезпечення різних режимів польоту, в тому числі і вертикального режиму польоту. З рівня техніки відомо, що силова установка БПЛА може бути бензинова, в якій джерелом енергії є паливо (бензин, гас і т.д.), а як двигун використовується ДВЗ, або електрична, в якій джерелом енергії є акумулятори, як двигун використовуються електромотори (електродвигуни) (див. матеріали сайтів http://www.credo-dialogue.com/getattachment/6cf5bf18-cf53-4532-b5bdled04dabc234/Bespilotnue-letateinue-apparatu.aspx, ttps://ru.wikipedia.org/wiki/%D0 %A0 %D0 %B0 %D0 %B4 %D0 %B8 %D0 %BE %D1 %83 %D0 %B F%D1 %80 %D0 %B0 %D0 %B2 %D0 %BB%D1 %8F %D0 %B5 %D0 %BC%D1 %8B%D0 %B9_% D 1 %81 %D0 %B0 %D0 %BC%D0 %BE %D0 %BB%D 1 %91 %D 1 %82). Бензиновий двигун забезпечує набагато більш тривалий політ БПЛА, так як в бензині, у розрахунку на кілограм, запасено в 10-15 разів більше енергії, ніж можна зберегти в найкращому акумуляторі. Однак така силова установка складна, менш надійна і вимагає значного часу для підготовки БПЛА до старту. Крім того, використання силової установки з бензиновим двигуном на безпілотних літальних апаратах створює такі недоліки: малу керованість маневрами БПЛА вертикального зльоту и посадки: на відміну від електродвигунів ДВЗ не здатний швидко змінювати оберти, що обертається для даного типу ЛА малої маневреності (довгий час реакції на команду оператора); великий рівень шуму: ДВЗ при роботі створює сильний шум (порядку 80-100 Дб), що неприпустимо при використанні в міських умовах. І якщо на ЛА використовується більше одного ДВЗ, то застосування глушників обертається великим ростом злітної ваги ЛА; компактність: ДВЗ у відмінності від електродвигуна вимагає пристрій (стартер) для автоматичного запуску, при застосуванні на ЛА більше одного ДВЗ оснащення кожного двигуна стартером обертається зростанням злітної ваги ЛА, також виникають проблеми з компонуванням ДВЗ на ЛА. Використання силової установки з електродвигуном на безпілотних літальних апаратах створює такі недоліки: малий час польоту, що спричинюється обмеженою ємністю акумуляторів, сучасні акумулятори, наприклад літій-іонні, мають енергетичну ємність - 110…200 Вт*год./кг, що призводить до обмеження за часом польоту (як правило 20-30 хв); постійна необхідність зарядки акумуляторів. Відомий безпілотний літальний апарат (Патент РФ №100491, МПК В64С 39/02, опубл. 20.12.2010 p.), що містить планер, силову установку з електродвигуном і блоком живлення у вигляді електричного акумулятора, бортове устаткування, що включає функціонально пов'язані між собою блок апаратури спостереження, приймально-передавальний блок, приймальнопередавальну антену і пілотажно-навігаційну систему, планер містить фюзеляж, крило і оперення, а електричний акумулятор складається щонайменше з одного паливного елемента, розміщеного в касеті, крило виконано з порожниною і оснащено елементами кріплення касети. Недоліками силової установки, яка використана в даному безпілотному літальному апараті є мала питома енергія системи та низький ККД і, як наслідок, малий радіус дії БПЛА. Відома електрична силова установкою безпілотних літальних (Патент РФ № 2495797, МПК B64D 27/24, В64С 39/02, опубл. 20.10.2013 p.), що містить маршовий електродвигун, на осі якого жорстко закріплений маршовий повітряний гвинт, балон з воднем із закріпленим на ньому редуктором, батарея паливних елементів, систему управління маршовим електродвигуном, контролер батареї паливних елементів, стартовий електродвигун, стартовий повітряний гвинт, контролер стартового електродвигуна, гондолу. В гондолі встановлені маршовий електродвигун, маршовий повітряний гвинт, балон з воднем, редуктор, батарея паливних елементів, вентилятори, датчики температури, клапан, ключ, контролер батареї паливних елементів. Відома конструкція не дозволяє здійснювати безпілотному ЛА польоти великої тривалості, так як має обмеження по ємності бортового джерела живлення для стартового та маршових електродвигунів. Ще одним недоліком є складність експлуатації - для функціонування конструкції потрібен рідкий водень, зберігання якого в польових умовах вкрай утруднено (практично неможливо), також зберігання рідкого водню вимагає підвищеної техніки безпеки, так як водень горючий, в сумішах з повітрям в певних пропорціях утворює вибухонебезпечні суміші, які легко детонують. В основу корисної моделі поставлена задача створення силової установки безпілотного літального апарата, в якій за рахунок іншого конструктивного виконання і інших взаємозв'язків між елементами забезпечується більша питома енергоємність, а завдяки перетворенню енергії ДВЗ в електроенергію для подальшого живлення тягового електродвигуна (електродвигунів) 1 UA 94802 U 5 10 15 20 25 30 35 40 45 50 55 досягається можливість управління тяговим електродвигуном(ми) з великою швидкістю реакції, суттєве поліпшення зниження шумових характеристик та простота конструкції при використанні великого числа тягових електродвигунів. Поставлена задача вирішується тим, що запропонована силова установка безпілотного літального апарата, яка містить тяговий безколекторний електричний двигун, повітряний гвинт, розташований на валу електричного двигуна, згідно з корисною моделлю, додатково мітить двигун внутрішнього згоряння, який використовується як первинне джерело енергії, до ротора якого за допомогою муфти або редуктора приєднаний ротор генератора електроенергії, до вихідних роз'ємів якого приєднані вхідні роз'єми перетворювача електроенергії зі змінного трифазного струму в постійний струм, до вихідних роз'ємів якого послідовно підключено щонайменше один блок управління обертами тягового безколекторного електричного двигуна, а до вихідних роз'ємів даного блоку приєднані вхідні роз'єми тягового безколекторного електричного двигуна, причому на вхід блоку управління обертами тягового безколекторного електричного двигуна подається сигнал, що задає необхідний режим роботи тягового безколекторного електричного двигуна. Суть корисної моделі пояснюється кресленнями, де на Фіг. 1 схематично зображена запропонована силова установка з одним тяговим безколекторним електродвигуном, а на Фіг. 2 - силова установка з трьома тяговими безколекторними електродвигунами. Запропонована силова установка безпілотного літального апарата (див. Фіг. 1) містить тяговий мітить двигун внутрішнього згоряння 1, який використовується як первинне джерело енергії, до ротора якого за допомогою муфти (або редуктора) 2 приєднаний ротор генератора електроенергії 3, до вихідних роз'ємів якого приєднані вхідні роз'єми перетворювача 4 електроенергії з змінного трифазного струму в постійний струм, до вихідних роз'ємів якого послідовно підключено щонайменше один блок управління 5 обертами тягового безколекторного електричного двигуна, а до вихідних роз'ємів даного блоку 5 приєднані вхідні роз'єми тягового безколекторного електричного двигуна 6, причому на вхід блоку управління 5 обертами тягового безколекторного електричного двигуна подається сигнал, що задає необхідний режим роботи тягового безколекторного електричного двигуна 6. На валу безколекторного електричного двигуна 6 розташований повітряний гвинт 7. Принцип роботи запропонованої силової установки полягає в слідуючому. Енергія, яка виробляється ДВЗ 1, з його ротора передається на ротор генератора електроенергії 3, який перетворює її в електроенергію змінного трифазного струму. Електроенергія, що виробляється генератором електроенергії 3 надходить в перетворювач 4 електроенергії, де вона перетворюється з трифазного змінного струму в постійний струм, далі постійний струм надходить в блок управління 5 обертами тягового електродвигуна. Режим роботи тягового електродвигуна 6 контролюється блоком управління 5 з допомогою зміни характеристик трифазного змінного струму, яка подається на тяговий електродвигун 6, залежно від сигналу управління обертами тягового електродвигуна 6 на вході блока управління 5. Знижений шум пропонованої силової установки досягається за рахунок установки ДВЗ 1 всередині літального апарата. Джерелом звуку крім вихлопних газів також є корпус ДВЗ, при установці ДВЗ всередині літального апарата можливе застосування звукоізоляції, що дозволяє додатково знизити рівень шуму. Управління обертами ДВЗ 1 здійснюється шляхом регулювання подачі палива, так як дана схема виключно механічна, вона не може забезпечити великій швидкості реакції ДВЗ на команду зміни обертів. Швидкість поширення електромагнітних хвиль в провіднику велика, при зміною блоком управління 5 напруги, вона практично миттєво надходить в електродвигун, що дозволяє говорити про набагато більшу швидкість реакції електродвигуна 6 на команду про зміну швидкості обертів, що критично для літальних апаратів типу квадрокоптер. Корисна модель пояснюється конкретним прикладом реалізації запропонованої силової установки, яка зображена на Фіг. 2. В даному випадку, кращим рішенням є послідовне підключення декількох блоків управління 5, при цьому напруга UБУ на кожному блоці управління 5 буде розраховується за наступною формулою: UБУ = UГЕ / N, де UГЕ - напруга, яка генерується генератором електроенергії; N - число блоків управління, які з'єднані в схемі послідовно. Сила струму для всіх блоків управління в даній схемі буде однакова і дорівнює силі струму, що генерується генератором електроенергії. 2 UA 94802 U 5 10 15 20 25 30 35 40 45 50 Для оцінки ефективності даної схеми розглянуто реалізацію її з використанням доступних на ринку компонентів: 1. Двигун внутрішнього згоряння - RCG 26cc Gas engine. Ефективна потужність: 2,6 л.с. (1,95 кВт) при 6500 об /хв. Витрата палива: 750 гр/год. Вага: 1122 гр. 2. Генератор електроенергії- Turnigy Aerodrive SK3-6374-149kv. Оберти/вольт: 149. Ефективна потужність: 2250 Вт. Максимальна напруга: 44V. Максимальна сила струму: 70А. Вага: 840 гр. 3. Перетворювач електроенергії зі змінного трифазного струму в постійний струм - діодний міст для перетворення змінного струму в постійний на основі 6 діодів. Вага: 30 гр. 4. Блок управління обертами тягового електродвигуна - TURNIGY TRUST 55A SBEC (3 штуки). Максимальний струм: 55А. Робоча напруга: 7,4-22,2V. Вага: 53 гр. 5. Тяговий електродвигун - NTM Prop Drive Series 35-42A 1250Kv 600W (3 штуки). Оберти/вольт: 1250. Вага: 148 гр. Максимальна сила струму: 54А. Максимальна напруга: 15V. Ефективна потужність: 650 Вт. Нижче наведені розрахунки енергоємності даної системи: Напруга, яка генерується генератором електроенергії: UГЕ =6500 об/хв /149 Kv-43,62V. Сила струму (для отримання об'єктивний даних включено в розрахунок 10 % втрати потужності на генераторі електроенергії): І = 1900 кBт/43,62V*0,9=39,20А. Напруга живлення на кожному блоці управління тяговим електродвигуном при послідовному підключенні: UБУ = 43,62V/3=14,54V. Потужність, що розвивається кожним тяговим електродвигуном (ККД сучасних безколекторних авіамодельних двигунів 95 %): РЕД = 14,54V * 39,2А * 0,95=541,47 Вт. Потужність всієї системи на виході: Р = 541,47 Вт * 3=1624,41 Вт. Вага всієї системи (включаючи вагу палива на годину роботи системи): 3245 гр. Енергоємність системи: 1624,41 Вт*1 год./3,245 Кг = 500,59 Вт*год./Кг. Запропонована корисна модель може бути використана в безпілотних літальних апаратах (БПЛА) для забезпечення різних режимів польоту, в тому числі і вертикального режиму польоту. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Силова установка безпілотного літального апарата, яка містить тяговий безколекторний електричний двигун, повітряний гвинт, розташований на валу електричного двигуна, яка відрізняється тим, що додатково мітить двигун внутрішнього згоряння, який використовується як первинне джерело енергії, до ротора якого за допомогою муфти або редуктора приєднаний ротор генератора електроенергії, до вихідних роз'ємів якого приєднані вхідні роз'єми перетворювача електроенергії зі змінного трифазного струму в постійний струм, до вихідних роз'ємів якого послідовно підключено щонайменше один блок управління обертами тягового безколекторного електричного двигуна, а до вихідних роз'ємів даного блока приєднані вхідні роз'єми тягового безколекторного електричного двигуна, причому на вхід блока управління обертами тягового безколекторного електричного двигуна подається сигнал, що задає необхідний режим роботи тягового безколекторного електричного двигуна. 3 UA 94802 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64D 27/00
Мітки: безпілотного, літального, апарата, установка, силова
Код посилання
<a href="https://ua.patents.su/6-94802-silova-ustanovka-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Силова установка безпілотного літального апарата</a>
Силова установка літального апарата
Номер патенту: 92199
Опубліковано: 11.08.2014
Автори: Кравець Володимир Миколайович, Солопов Денис Олександрович
МПК: F02K 1/00
Мітки: установка, апарата, силова, літального
Формула / Реферат:
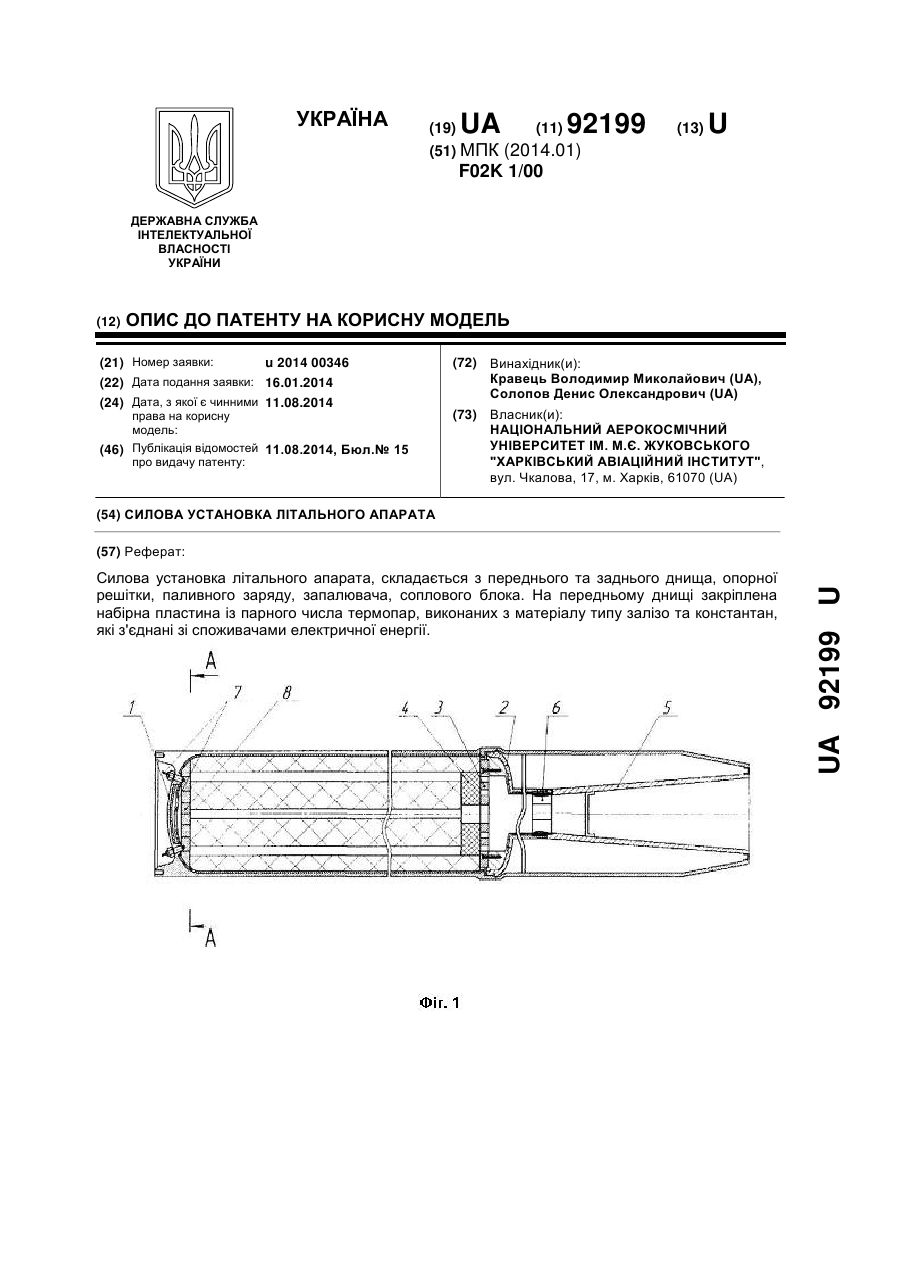
Силова установка літального апарата, що складається з переднього та заднього днища, опорної решітки, паливного заряду, запалювача, соплового блока, яка відрізняється тим, що на передньому днищі закріплена набірна пластина із парного числа термопар, виконаних з матеріалу типу залізо та константан, які з'єднані зі споживачами електричної енергії.
Силова установка літального апарата
Номер патенту: 82159
Опубліковано: 25.07.2013
Автори: Солопов Денис Олександрович, Кравець Володимир Миколайович
МПК: F02K 1/00
Мітки: силова, апарата, установка, літального
Формула / Реферат:
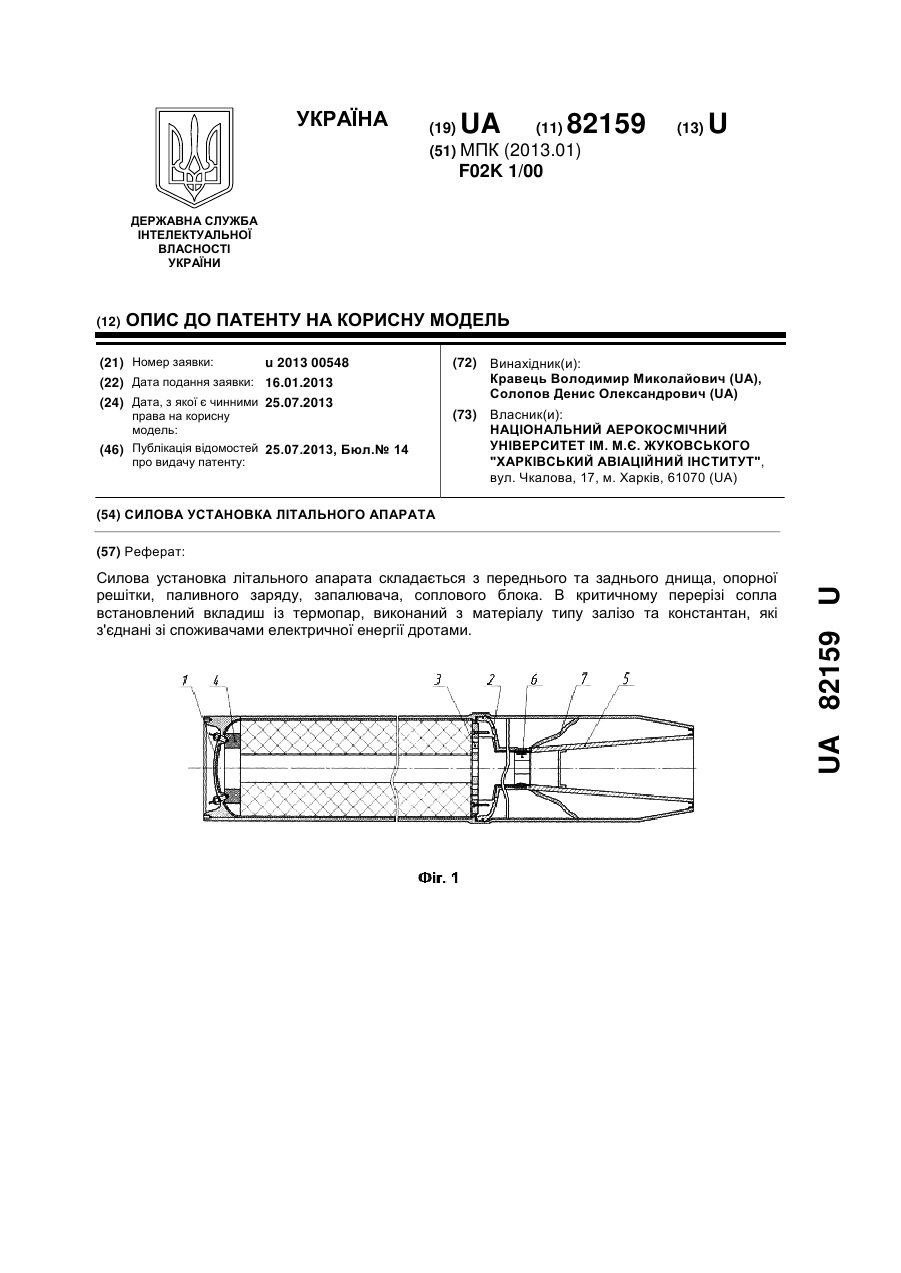
Силова установка літального апарата, що складається з переднього та заднього днища, опорної решітки, паливного заряду, запалювача, соплового блока, яка відрізняється тим, що в критичному перерізі сопла встановлений вкладиш із термопар, виконаний з матеріалу типу залізо та константан, які з'єднані зі споживачами електричної енергії дротами.
Система стабілізації безпілотного літального апарата
Номер патенту: 65285
Опубліковано: 25.11.2011
Автори: Кописов Олег Едуардович, Льовкін Сергій Генадійович, Субота Анатолій Максимович
МПК: B64C 13/00
Мітки: апарата, безпілотного, стабілізації, система, літального
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління та датчик кута, датчик кутової швидкості, яка відрізняється тим, що містить задатчик, вихід якого з'єднаний з входом обчислювача, вихід рульової машини одночасно з'єднаний з входом органа управління і через перший перетворювач з'єднаний з входом адаптивного контура, а вихід органа управління з'єднаний...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 75971
Опубліковано: 25.12.2012
Автори: Красножон Олександра Володимирівна, Андрущенко Тетяна Миколаївна, Субота Анатолій Максимович, Кулік Анатолій Степанович
МПК: G05G 7/00
Мітки: стабілізації, апарата, безпілотного, літального, відмовостійка, система, кутової
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, суматори, регулятор, сервопривод, датчики кута тангажа і кутової швидкості, електронні ключі, індикатори відмови, диференціатор, інтегратор, яка відрізняється тим, що введено перший фільтр, вхід якого з'єднаний з першим входом датчика кута тангажа, вихід якого через диференціатор з'єднаний з першим входом другого електронного ключа,...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Амелін Сергій Вікторович, Антошик Вікторія Миколаївна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, система, літального, стабілізації, безпілотного
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Попередній патент: Тюк пресованої рослинної трав’янистої сировини
Наступний патент: Спосіб отримання питної води, збагаченої воднем
Випадковий патент: Спосіб діагностики дисфункції правого шлуночка при гострій тромбоемболії легеневих артерій