Редуктор регульований
Номер патенту: 95719
Опубліковано: 25.08.2011
Формула / Реферат
1. Редуктор регульований, що включає корпус, в якому встановлені з можливістю обертання коаксіально розташовані ведучий та ведений вали, планетарні ряди з малими та великими центральними шестернями, водилами, на яких з можливістю обертання розташовані кінематично з'єднані з центральними шестернями сателіти, гальмівні механізми з активними та пасивними ланками, при цьому кожна розташована у корпусі з можливістю обертання навколо осі ведучого вала пасивна ланка з'єднана з однією з центральних шестерень, а кожна розташована у корпусі з можливістю пересування активна ланка взаємодіє з корпусом через пружну ланку, через один із кінематичних ланцюжків системи управління, що містить у собі вхідну та вихідну ланки, взаємодіючи з розташованим у корпусі з можливістю пересування або провертання валом управління, на якому розташовані деталі управління, що взаємодіють з вхідними ланками кінематичних ланцюжків, вихідні ланки яких взаємодіють з активними ланками гальмівних механізмів, який відрізняється тим, що до складу кожного кінематичного ланцюжка системи управління введено силову пружну ланку, додаткову пружну ланку, механізм вільного ходу з вхідною та вихідною ланками, додатковий механізм вільного ходу з вхідною та вихідною ланками, проміжну деталь, допоміжну деталь та додаткову деталь, при цьому допоміжна деталь взаємодіє з вхідною ланкою системи управління через силову пружну ланку та з вихідною ланкою системи управління через проміжну деталь та механізм вільного ходу, а вихідна ланка системи управління взаємодіє з корпусом через додаткову деталь та додатковий механізм вільного ходу, вихідна ланка якого з'єднана з корпусом, або безпосередньо через додатковий механізм вільного ходу, при цьому водила сателітів з'єднані з веденим валом кінематично за допомогою шестерень, або з'єднані жорстко, а з кожним сателітом знаходиться у зчепленні центральна шестірня, з'єднана з ведучим валом, причому всі пасивні ланки гальмівних механізмів є гальмівними барабанами, а активні ланки є гальмівними колодками чи гальмівними стрічками, проміжна деталь є розташованою у корпусі з можливістю радіального пересування кулісою, з якою з'єднана додаткова деталь у вигляді куліси, усередині котрої розташовано з'єднаний з вхідною ланкою додаткового механізму вільного ходу повзун, допоміжна деталь являє собою шарнірно з'єднаний з корпусом важіль, з яким шарнірно з'єднана вхідна ланка системи управління у вигляді важеля з роликом, котрий виконаний з можливістю взаємодіяти із деталлю управління у вигляді диска з сектороподібним кулачком, при цьому всі диски з кулачками розташовані коаксіально та повернуті один відносно одного на певний кут синхронізації ![]() , який не перевищує кутовий розмір сектора кулачка
, який не перевищує кутовий розмір сектора кулачка ![]() , при цьому на валу управління встановлено диск синхронізатора з лункоподібними вирізами, які виконані з можливістю взаємодіяти зі встановленим на корпусі кульковим фіксатором, кутова відстань між вирізами дорівнює куту
, при цьому на валу управління встановлено диск синхронізатора з лункоподібними вирізами, які виконані з можливістю взаємодіяти зі встановленим на корпусі кульковим фіксатором, кутова відстань між вирізами дорівнює куту ![]() , а між кутами
, а між кутами ![]() та
та ![]() має бути дотримано таке співвідношення:
має бути дотримано таке співвідношення: ![]() .
.
2. Редуктор регульований за п. 1, який відрізняється тим, що механізм вільного ходу та додатковий механізм вільного ходу виконані у вигляді кільцеподібної ланки або зубчастої рейки, котрі виконані з можливістю взаємодіяти зі храповими собачками, або гвинтових механізмів з симетричним чи асиметричним профілем різьби, кут підйому якої є більшим за кут тертя у гвинтовій парі .
3. Редуктор регульований за п. 1, який відрізняється тим, що у корпусі розташовано декілька кінематично з'єднаних між собою валів управління.
Текст
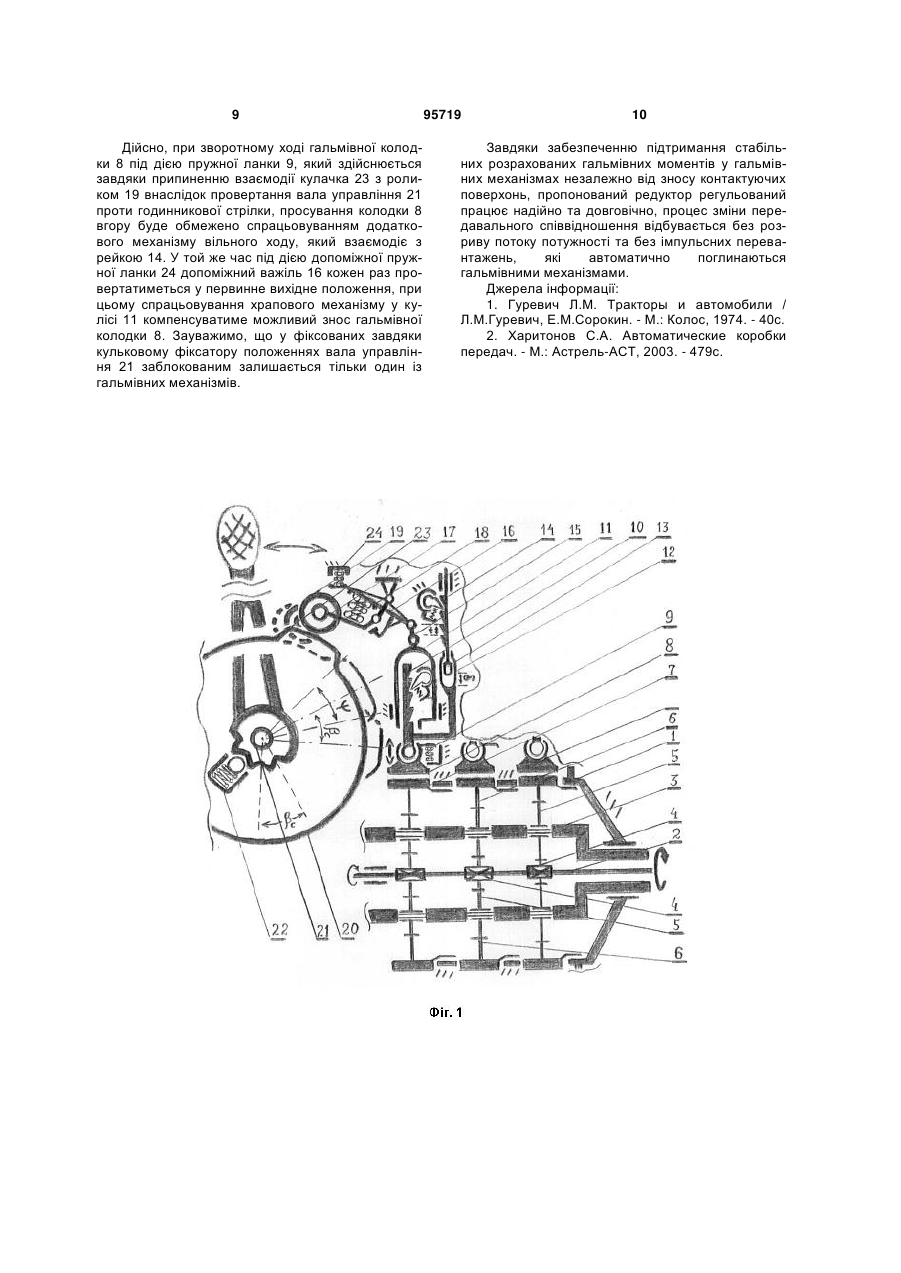
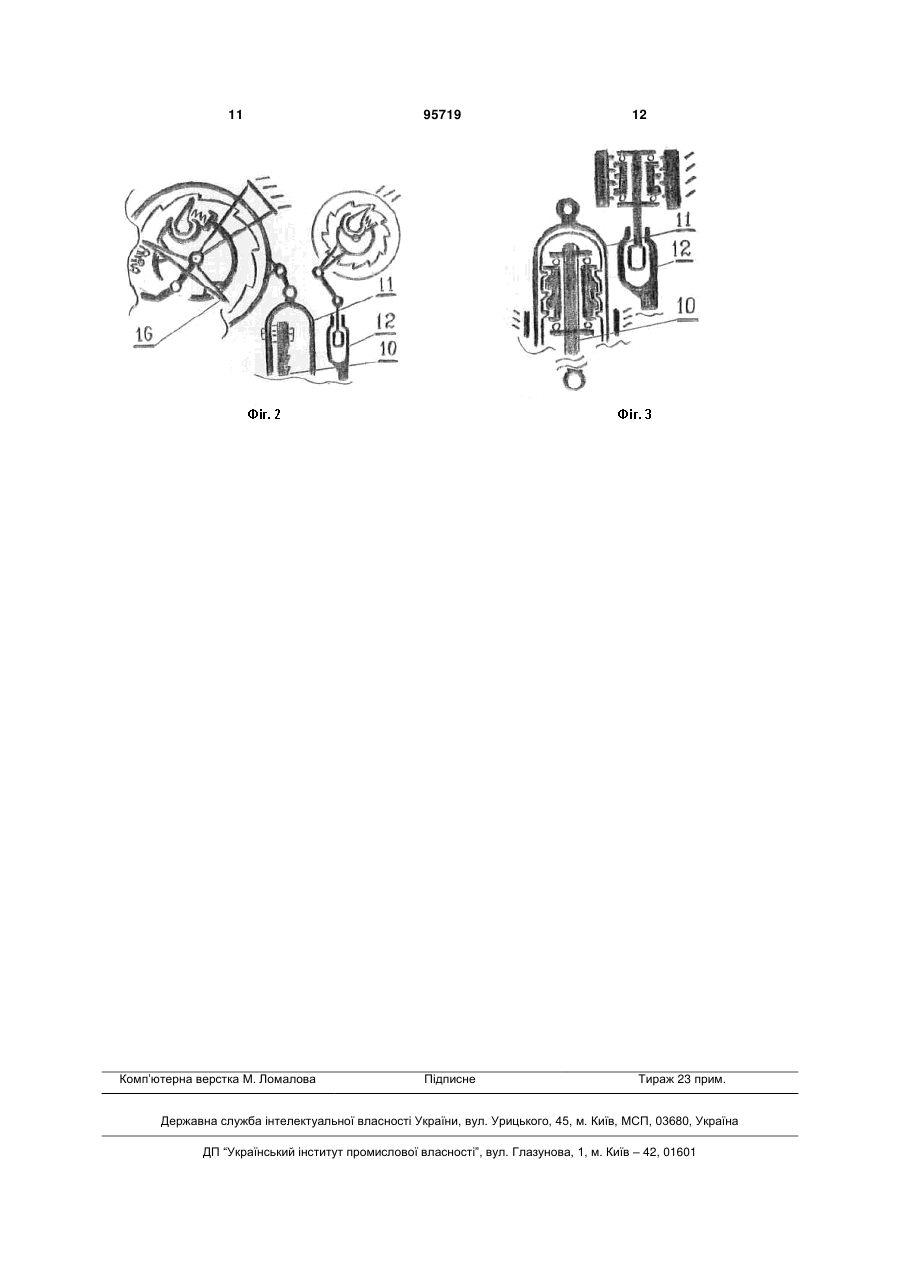
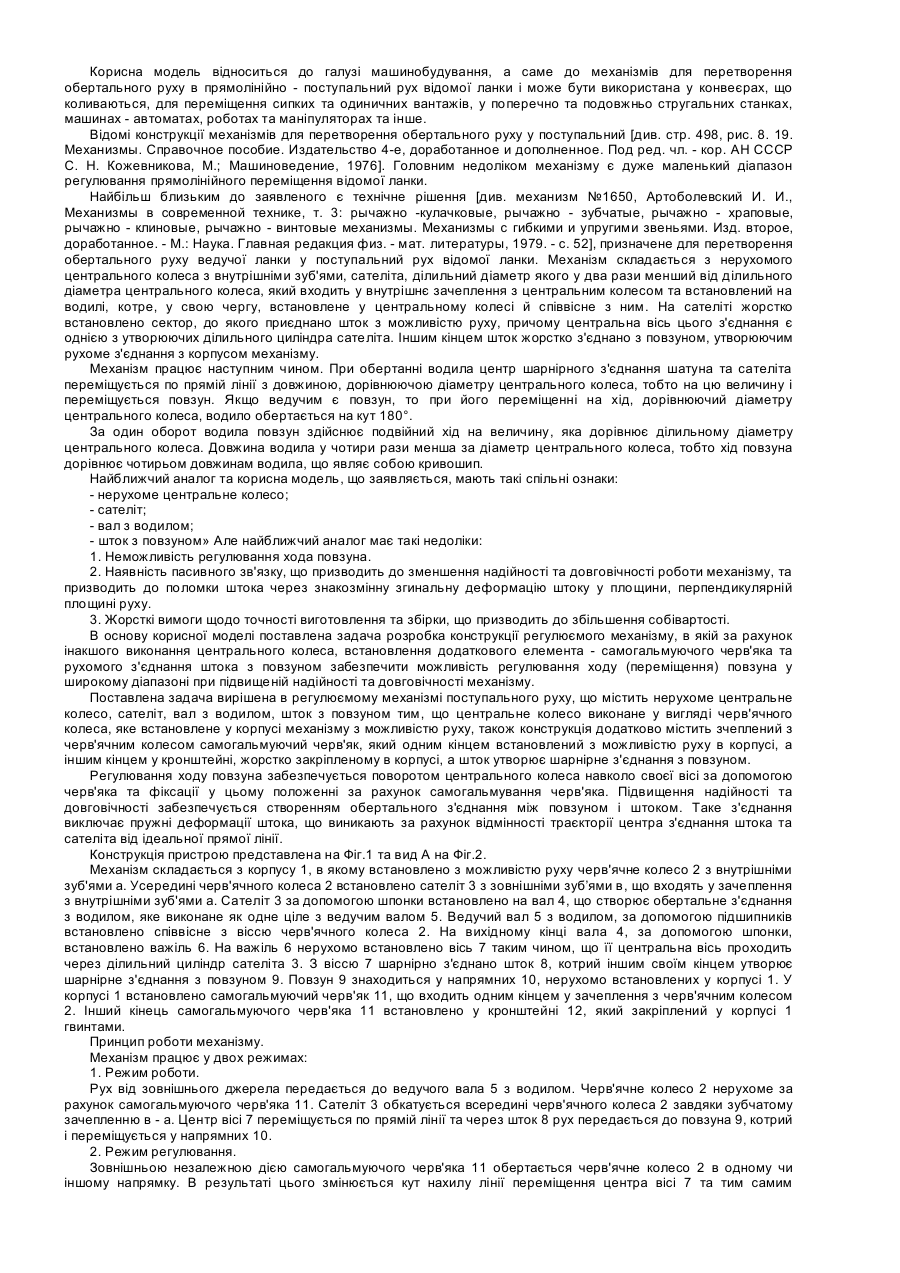
1. Редуктор регульований, що включає корпус, в якому встановлені з можливістю обертання коаксіально розташовані ведучий та ведений вали, планетарні ряди з малими та великими центральними шестернями, водилами, на яких з можливістю обертання розташовані кінематично з'єднані з центральними шестернями сателіти, гальмівні механізми з активними та пасивними ланками, при цьому кожна розташована у корпусі з можливістю обертання навколо осі ведучого вала пасивна ланка з'єднана з однією з центральних шестерень, а кожна розташована у корпусі з можливістю пересування активна ланка взаємодіє з корпусом через пружну ланку, через один із кінематичних ланцюжків системи управління, що містить у собі вхідну та вихідну ланки, взаємодіючи з розташованим у корпусі з можливістю пересування або провертання валом управління, на якому розташовані деталі управління, що взаємодіють з вхідними ланками кінематичних ланцюжків, вихідні ланки яких взаємодіють з активними ланками гальмівних механізмів, який відрізняється тим, що до складу кожного кінематичного ланцюжка системи управління введено силову пружну ланку, додаткову пружну ланку, механізм вільного ходу з вхідною та вихідною ланками, додатковий механізм вільного ходу з вхідною та вихідною ланками, проміжну деталь, допоміжну деталь та додаткову деталь, при цьому допоміжна деталь взаємодіє з вхідною ланкою 2 (19) 1 3 95719 4 3. Редуктор регульований за п. 1, який відрізняється тим, що у корпусі розташовано декілька кінематично з'єднаних між собою валів управління. Винахід належить до області машинобудування і стосується редукторів, спроможних змінювати передавальне співвідношення (механічних ступінчастих коробок зміни швидкостей). Відомі пристрої спроможні змінювати передавальне співвідношення (механічних ступінчастих коробок зміни швидкостей) [1], виконані у вигляді механічного багатоступеневого редуктора з паралельно розташованими ведучим та веденим валами, де зміна передавального співвідношення відбувається за рахунок осьового пересування кулачкових чи шліцьових муфт, що призводить до перерозподілу потоку потужності між різними парами шестерень. Недоліками таких пристроїв є неминучий розрив потоку потужності у процесі зміни швидкості обертання веденого вала (процеси перемикання передач), а також недостатня надійність та довговічність, обумовлена перевантаженням муфт у процесі перемикання передач, що зменшує їх ресурс роботи. Найбільш близьким до передбачуваного винаходу є пристрій, відомий як планетарна коробка зміни швидкостей з механічним перемиканням передач [2]. Тут процес зміни передавального співвідношення (процес перемикання передач) відбувається шляхом почергового загальмовування та розгальмовування гальмівних барабанів, кожен з яких з'єднаний з малою чи великою центральною (сонячною) шестірнею планетарного ряду, при цьому передача обертового руху з ведучого вала на коаксіально розташований ведений вал відбувається саме через той планетарний ряд, гальмівний барабан якого загальмований відносно корпуса внаслідок взаємодії з гальмівною стрічкою, котра притискається до гальмівного барабана внаслідок спрацьовування механічної системи управління. Недоліки найближчого аналогу (прототипу наступні): - розрив потоку потужності в процесі зміни передавального співвідношення внаслідок почергового спрацьовування гальмівних механізмів (загальмовування гальмівних барабанів). - неминуче імпульсивне перевантаження гальмівних механізмів через розрив потоку потужності в процесі перемикання передач призводить до прискореного зношення цих механізмів (особливо гальмівних стрічок) та перевантажує механічну систему управління, що зменшує ресурс роботи коробки зміни швидкостей в цілому. Задача винаходу - підвищення надійності та довговічності редуктора та забезпечення можливості зміни передавального співвідношення без розриву потоку потужності, а також зменшення імпульсних навантажень на елементи конструкції. При цьому досягається технічний результат, який полягає у тому, що у редукторі регульовано му, котрий включає корпус, в якому встановлені з можливістю обертання коаксіально розташовані ведучий та ведений вали, планетарні ряди з малими та великими центральними шестернями, водилами, на яких з можливістю обертання розташовані кінематично з'єднані з центральними шестернями сателіти, гальмівні механізми з активними та пасивними ланками, при цьому кожна розташована у корпусі з можливістю обертання навколо осі ведучого вала пасивна ланка з'єднана з однією з центральних шестерень, а кожна розташована у корпусі з можливістю пересування активна ланка, взаємодіючи з корпусом через пружну ланку, через один із кінематичних ланцюжків системи управління, що містить у собі вхідну та вихідну ланки, взаємодіє з розташованим у корпусі з можливістю пересування або провертання валом управління, на якому розташовані деталі управління, що взаємодіють з вхідними ланками кінематичних ланцюжків, вихідні ланки яких взаємодіють з активними ланками гальмівних механізмів, відповідно до винаходу введені такі нові ознаки: - до складу кожного кінематичного ланцюжка системи управління введено силову пружну ланку, додаткову пружну ланку, механізм вільного ходу з вхідною та вихідною ланками, додатковий механізм вільного ходу з вхідною та вихідною ланками, розташовану у корпусі з можливістю пересування проміжну кулісу, додаткову кулісу, шарнірно з'єднаний з корпусом та з проміжною кулісою допоміжний важіль, при цьому з'єднана з додатковою кулісою вихідна ланка системи управління взаємодіє з корпусом через додаткову кулісу та додатковий механізм вільного ходу, вихідна ланка якого з'єднана з корпусом, або безпосередньо через додатковий механізм вільного ходу, при цьому водила сателітів з'єднані з веденим валом кінематично за допомогою шестерень або з'єднані жорстко, а з кожним сателітом знаходиться в зчепленні центральна шестірня, з'єднана з ведучим валом; - при чому всі пасивні ланки гальмівних механізмів є гальмівними барабанами, активні ланки є гальмівними колодками чи гальмівними стрічками, всередині додаткової куліси розташовано з'єднаний з вхідною ланкою додаткового механізму вільного ходу повзун, вихідна ланка системи управління виконана з можливістю взаємодіяти з допоміжним важелем системи управління через проміжну кулісу та механізм вільного ходу, вхідна ланка котрого жорстко або шарнірно з'єднана з вихідною ланкою системи управління, а вихідна ланка цього механізму розташована на проміжній кулісі чи на допоміжному важелі, виконаному з можливістю взаємодіяти з корпусом через додаткову пружну ланку та через силову пружну ланку з вхідною ланкою системи управління, виконану у вигляді шарнірно з'єднаного з допоміжним важелем, важеля з роликом, котрий виконаний з мож 5 ливістю взаємодіяти з деталлю управління у вигляді диску з сектороподібним кулачком, при цьому всі диски з кулачками розташовані коаксіально та повернуті один відносно одного на певний кут синхронізації c , який не перевищує кутовий розмір сектора кулачка , при цьому на валу управління розташовано лункоподібні вирізи, які виконанні з можливістю взаємодіяти зі встановленим на корпусі кульковим фіксатором, кутова відстань між вирізами дорівнює куту c , а між кутами та c має бути дотримано таке співвідношення: c 18c ; , - усі механізми вільного ходу містять у собі кільцеподібні ланки або зубчасті рейки, котрі взаємодіють з храповими собачками, або гвинтові механізми з симетричним чи асиметричним профілем різьби, кут підйому якої є більшим за кут тертя у гвинтовій парі; - у корпусі розташовано декілька кінематично з'єднаних між собою валів управління. Наявність у пропонованому редукторі кінематичних ланцюжків системи управління, до складу кожного з яких введено силову пружну ланку, додаткову пружну ланку, механізм вільного ходу з вхідною та вихідною ланками, додатковий механізм вільного ходу з вхідною та вихідною ланками, проміжну кулісу розташовану в корпусі з можливістю пересування, допоміжну кулісу та додаткову кулісу, шарнірно з'єднаний з корпусом та з проміжною кулісою допоміжний важіль, при цьому з'єднана з додатковою кулісою вихідна ланка системи управління взаємодіє з корпусом через додаткову кулісу та додатковий механізм вільного ходу, допоміжну деталь та додаткову деталь, при цьому допоміжний важіль взаємодіє з вхідною ланкою системи управління через силову пружну ланку та з вихідною ланкою системи управління через проміжну деталь та механізм вільного ходу, а вихідна ланка системи управління взаємодіє з корпусом через додаткову кулісу та додатковий механізм вільного ходу, вихідна ланка якого з'єднана з корпусом, або безпосередньо через додатковий механізм вільного ходу, дозволяє забезпечити потрібний гальмівний момент у гальмівному механізмі під час його загальмовування, оскільки активна ланка цього механізму буде притискатись до пасивної ланки через допоміжний важіль, проміжну кулісу та механізм вільного ходу саме з потрібним зусиллям, яке забезпечує силова пружна ланка, дозволяючи одночасно захистити усі елементи конструкції від імпульсних перевантажень, коли через перевантаження пасивна ланка гальмівного механізму лише провернеться на певний кут, але усі навантажені деталі конструкції залишаться неушкодженими. Пружна ланка та додаткова пружна ланка забезпечують повне розблокування гальмівного механізму тоді, коли передача обертового руху та потоку потужності буде здійснюватись через інший гальмівний механізм, пасивна ланка якого з'єднана з іншим планетарним рядом. Наявність механізму вільного ходу, через який передається зусилля від силової пружної ланки на активну ланку гальмівно 95719 6 го механізму, а також додаткового механізму вільного ходу, через який за допомогою додаткової деталі вихідна ланка кінематичного ланцюжка системи управління з'єднана з корпусом, дозволяє забезпечити потрібний гальмівний момент при заблоковуванні гальмівного механізму, незалежно від рівня зношення контактуючих поверхонь, а також повну відсутність гальмівного моменту під час розблокування завдяки гарантованому відсуванню активної ланки від пасивної. Наявність у пропонованому редукторі водил сателітів, з'єднаних з веденим валом кінематично за допомогою шестерень або жорстко, а також наявність кінематично з'єднаних із сателітами центральних шестерень, які з'єднані з ведучим валом, дозволяє передавати обертовий рух з ведучого вала на ведений через сателіти та центральні (сонячні) шестерні. Наявність у пропонованому редукторі механізмів вільного ходу, які містять у собі кільцеподібні ланки або зубчасті рейки, котрі взаємодіють з храповими собачками, або гвинтові механізми з симетричним чи асиметричним профілем різьби, кут підйому якої є більшим за кут тертя у гвинтовій парі, дозволяє якомога зменшити люфти у кінематичному ланцюжку системи управління під час заблоковування гальмівного механізму незалежно від рівня зносу контактуючих поверхонь у цьому механізмові, забезпечуючи гарантований потрібний гальмівний момент, та дозволяючи завжди надійно від'єднати контактуючі поверхні одна від одної під час розблоковування гальмівного механізму, що гарантує нульовий гальмівний момент та повне виключення з роботи відповідного планетарного ряду. Наявність у пропонованому редукторі розташованих у корпусі декількох кінематично з'єднаних між собою валів управління дозволяє поліпшити роботу системи управління за рахунок чіткішої синхронізації у спрацьовуванні гальмівних механізмів, розташувавши вал управління якомога ближче до відповідного гальмівного механізму, що дозволяє зменшити розміри та вагу деталей кінематичних ланцюжків системи управління, особливо, коли в редукторі міститься велика кількість планетарних рядів та гальмівних механізмів. Наявність у пропонованому редукторі пасивних ланок гальмівних механізмів у вигляді гальмівних барабанів активних ланок у вигляді гальмівних колодок чи гальмівних стрічок, розташованої у корпусі з можливістю пересування куліси, додаткової куліси всередині якої розташовано з'єднаний з вхідною ланкою додаткового механізму вільного ходу повзун, шарнірно з'єднаного з корпусом допоміжного важеля, з яким шарнірно з'єднана вхідна ланка системи управління у вигляді важеля, з яким шарнірно з'єднана вхідна ланка системи управління у вигляді важеля з роликом, котрий взаємодіє з деталлю управління у вигляді диска з сектороподібним кулачком, при цьому усі диски з кулачками розташовані коаксіально та повернуті один відносно одного на певний кут синхронізації c , який не перевищує кутовий розмір сектора кулачка , при цьому на валу управління встано 7 влено диск синхронізатора з лункоподібними вирізами, які взаємодіють зі встановленим на корпусі кульковим фіксатором, кутова відстань між вирізами дорівнює куту c , а між кутами та c має бути дотримано таке співвідношення: c 18c ; , дозволяє забезпечити зміну передавального співвідношення без розриву потоку потужності, оскільки така зміна відбувається шляхом перерозподілу потоку потужності з одного планетарного ряду на інший завдяки заблоковуванню та розблоковуванню гальмівних механізмів цих планетарних рядів, а вищезгадане розташування дисків управління з кулачками, що підтискають ролики вхідних ланок кінематичних ланцюжків, забезпечує одночасне підтискання не менше ніж одного з цих роликів під час провертання вала управління, при цьому у певних проміжних положеннях вала управління можливе короткочасне підгальмовування одразу двох гальмівних барабанів з їх невеликим провертанням, при цьому повної зупинки одночасно двох гальмівних барабанів не відбувається, оскільки гальмівний момент є обмежений зусиллям, яке спроможне забезпечити силова пружна ланка. При цьому у фіксованих за допомогою кулькового фіксатора положення вала управління загальмований лише один із гальмівних барабанів. Пропонований редуктор регульований зображено на фіг. 1, фіг. 2 та фіг. 3. Редуктор регульований включає в себе: Нерухомий корпус 1, в якому з можливістю обертання коаксіально розташовані ведучий вал 2 та ведений вал 3, при цьому вал 3 є охоплюючою деталлю вала 2. На валу 2 жорстко закріплені центральні шестерні 4, кожна з яких знаходиться у зачепленні з сателітами 5, кожен з яких розташований на валу 3 із можливістю обертання. Кожна мала центральна шестірня 4 за допомогою сателітів 5 кінематично з'єднана з великою центральною шестірнею 6, жорстко з'єднаною із розташованим у корпусі з можливістю обертання гальмівним барабаном 7, який є охоплюючою деталлю для вала 3, взаємодіючи при цьому з гальмівною колодкою 8, розташованою в корпусі з можливістю радіального пересування. Кожна колодка 8 взаємодіє з корпусом через пружну ланку 9, а також взаємодіє з вихідною ланкою 10 системи управління, яка виконана у вигляді рейки з зубчастою різьбою, котра через храповий механізм взаємодіє з розташованою у корпусі з можливістю радіального пересування проміжною кулісою 11, при цьому з ланкою 10 жорстко з'єднана додаткова куліса 12, всередині якої розташовано повзун 13, жорстко з'єднаний із зубчастою рейкою 14, яка є вхідною ланкою додаткового механізму вільного ходу. Рейка 14 із храповим зубом взаємодіє з корпусом 1 за допомогою храпового механізму, при цьому крок t храпового зуба є менший за величину , яка являє собою відстань вільного ходу повзуна 13 усередині куліси 12. Проміжна куліса 11 за допомогою шарнірної тяги 15 з'єднана з допоміжним важелем 16, який шарнірно з'єднаний з корпусом 1. З допоміжним важелем 16 шарнірно з'єднаний вхідний важіль 17. Важіль 17, який є вхідною ланкою ланцю 95719 8 жка управління, взаємодіє з важелем 16 за допомогою силової пружної ланки 18, а розташований на важелі 17 ролик 19 взаємодіє з одним із дисків управління 20. Усі диски 20 коаксіально розташовані на валу управління 21, вирізами, котрі взаємодіють з розташованим на корпусі кульковим фіксатором 22. На кожному диску управління 20 встановлено сектороподібний кулачок 23 з кутовим розміром . Додаткова пружна ланка 24 взаємодіє з корпусом 1 та з допоміжним важелем 16. На фіг. 2 та фіг. 3 показані різні варіанти використання механізмів вільного ходу у пропонованому редукторі регульованому. Пропонований редуктор регульований працює наступним чином. Обертовий рух з ведучого вала 2 через одну з розташованих на цьому валу центральних шестерень 4 передається на кінематично з'єднаний з нею сателіт 5, розташований на веденому валу 3 з можливістю обертання. Сателіт 5, взаємодіючи з великою центральною шестірнею 6, з'єднаною з заблокованим гальмівним барабаном 7, передає обертовий рух на ведений вал 3, при цьому обертовий рух передається тільки через сателіти того планетарного ряду, в якому велика центральна шестірня з'єднана з загальмованим гальмівним барабаном, а решта центральних шестерень вільно обертається в корпусі разом із відповідними гальмівними барабанами, котрі є розблокованими. Через кінематичний ланцюжок системи управління, що включає в себе зубчасту рейку 10, кулісу 11 із храповою собачкою, шарнірну тягу 15, допоміжний важіль 16 та вхідний важіль 17 із роликом 19, гальмівна колодка 8 притискається до заблокованого гальмівного барабана тоді, коли ролик 19 взаємодіє з кулачком 23, розташованим на дискові управління 20, оскільки при цьому силова пружна ланка 18 стискається, передаючи гальмівне зусилля на колодку 8. Для зміни передавального співвідношення необхідно провернути вал управління на кут c , тоді заблокується сусідній гальмівний механізм, при цьому під час провертання вала управління 21 виникає ситуація, коли одночасно два ролики взаємодіють з кулачками своїх дисків управління, спричинюючи одночасне підгальмовування двох сусідніх гальмівних барабанів, при цьому потік потужності не переривається, обертовий рух короткочасно передається одразу через два планетарних ряди, а повної зупинки гальмівних барабанів не відбувається, оскільки гальмівне зусилля, що передається через кожен із кінематичних ланцюжків, обмежене розрахованим зусиллям максимально стиснутої силової пружної ланки. Завдяки спрацьовуванню храпового механізму вільного ходу у кулісі 11 компенсується неминучий знос контактуючих поверхонь у кожному гальмівному механізмі, внаслідок чого зусилля стиснутої силової пружної ланки залишається приблизно однаковим весь час експлуатації пропонованого редуктора, а необхідна для повного розгальмовування відстань між барабаном та гальмівною колодкою забезпечується наявністю вільного ходу повзуна 13 у кулісі 12, який мусить перевищувати крок t храпового зуба рейки 14. 9 Дійсно, при зворотному ході гальмівної колодки 8 під дією пружної ланки 9, який здійснюється завдяки припиненню взаємодії кулачка 23 з роликом 19 внаслідок провертання вала управління 21 проти годинникової стрілки, просування колодки 8 вгору буде обмежено спрацьовуванням додаткового механізму вільного ходу, який взаємодіє з рейкою 14. У той же час під дією допоміжної пружної ланки 24 допоміжний важіль 16 кожен раз провертатиметься у первинне вихідне положення, при цьому спрацьовування храпового механізму у кулісі 11 компенсуватиме можливий знос гальмівної колодки 8. Зауважимо, що у фіксованих завдяки кульковому фіксатору положеннях вала управління 21 заблокованим залишається тільки один із гальмівних механізмів. 95719 10 Завдяки забезпеченню підтримання стабільних розрахованих гальмівних моментів у гальмівних механізмах незалежно від зносу контактуючих поверхонь, пропонований редуктор регульований працює надійно та довговічно, процес зміни передавального співвідношення відбувається без розриву потоку потужності та без імпульсних перевантажень, які автоматично поглинаються гальмівними механізмами. Джерела інформації: 1. Гуревич Л.М. Тракторы и автомобили / Л.М.Гуревич, Е.М.Сорокин. - М.: Колос, 1974. - 40с. 2. Харитонов С.А. Автоматические коробки передач. - М.: Астрель-АСТ, 2003. - 479с. 11 Комп’ютерна верстка М. Ломалова 95719 Підписне 12 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControlled reducer
Автори англійськоюLIMITED LIABILITY COMPANY “SINTA”
Назва патенту російськоюРедуктор регулируемый
Автори російськоюОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ "СИНТА"
МПК / Мітки
МПК: B60K 17/06, F16H 3/58
Мітки: редуктор, регульованій
Код посилання
<a href="https://ua.patents.su/6-95719-reduktor-regulovanijj.html" target="_blank" rel="follow" title="База патентів України">Редуктор регульований</a>
Регульований механізм поступального переміщення
Номер патенту: 32190
Опубліковано: 12.05.2008
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович, Олісеєнко Юрій Володимирович
МПК: F16H 29/00
Мітки: регульованій, механізм, переміщення, поступального
Формула / Реферат:
Регульований механізм поступального руху, що містить нерухоме центральне колесо, сателіт, вал з водилом, шток та повзун, який відрізняється тим, що центральне колесо виконане у вигляді черв'ячного колеса, яке встановлене у корпусі механізму з можливістю руху, також конструкція додатково містить зчеплений з черв'ячним колесом самогальмуючий черв'як, який одним кінцем встановлений з можливістю руху в корпусі, а іншим кінцем у кронштейні,...
Регульований зубчасто-важільний механізм

Номер патенту: 31037
Опубліковано: 25.03.2008
Автори: Тутаєв Сергій Валерійович, Амбарцумянц Роберт Вачаганович
МПК: F16H 29/00
Мітки: зубчасто-важільний, механізм, регульованій
Формула / Реферат:
Регульований зубчасто-важільний механізм, що містить ведучий та ведений вали, сателіти, центральне колесо, водило, шатуни, кривошипи, вихідну ланку, який відрізняється тим, що вихідна ланка складається з циліндричних стрижнів і фланця, що має циліндричні пази і співвісний з ведучим валом отвір, у якому встановлений шток, на одному кінці якого рухомо встановлена втулка, до якої одним кінцем шарнірно кріпляться важелі однакової довжини, інший...
Регульований поршневий насос
Номер патенту: 50902
Опубліковано: 25.06.2010
Автори: Погорілець Олександр Миколайович, Волянський Михайло Станіславович
Мітки: насос, регульованій, поршневий
Формула / Реферат:
Регульований поршневий насос, що містить циліндр, в якому розміщений поршень, що здійснює зворотно-поступальний рух, який відрізняється тим, що для регулювання ходу поршня та для приведення його в рух використовується планетарний механізм, сонячна шестірня якого встановлена на рамі з можливістю її повороту на будь-який кут за допомогою черв'ячної передачі, що приводиться в рух реверсивним електродвигуном, а палець кривошипа розміщений у...
Регульований двоколісний зубчасто-важільний механізм
Номер патенту: 28676
Опубліковано: 25.12.2007
Автори: Тутаєв Сергій Валерійович, Амбарцумянц Роберт Вачаганович
МПК: F16H 29/00
Мітки: зубчасто-важільний, двоколісний, регульованій, механізм
Формула / Реферат:
Двоколісний зубчасто-важільний механізм, що містить ведучий та вихідний вали, сателіт, центральне колесо, водило, шатун, коромисло, який відрізняється тим, що на сателіті встановлена вилка, в якій рухливо встановлений гвинт із роликом на кінці, на гвинті встановлений повзун, що утворює із гвинтом гвинтову пару, і водночас рухливо з’єднаний з шатуном, повзун разом з вилкою перебуває усередині У-подібного корпусу, який встановлено на штоці,...
Пересувний підйомник
Номер патенту: 64758
Опубліковано: 15.03.2004
Автор: Кателевський Микола Прокопович
МПК: B60P 1/02, B66B 9/16, B66F 3/00
Мітки: підйомник, пересувний
Формула / Реферат:
1. Пересувний підйомник, який містить опорну раму на колесах, вантажну площадку, шарнірно-важільний механізм типу "нюрнберзькі ножиці", силовий механізм підйому, який відрізняється тим, що в шарнірно-важільному механізмі нижня ланка нижнім шарніром з'єднана з опорною рамою, бокові шарніри нижньої ланки з’єднані віссю, яка опирається на підпірку для вантажу силового механізму підйому, а довжини важелів нижньої ланки, які з'єднані...
Попередній патент: Велосипед з додатковим привідним механізмом
Наступний патент: Септик для біологічного очищення побутових стічних вод
Випадковий патент: Дисковий фільтр