Спосіб визначення параметрів зйомки космічним апаратом видового спостереження
Номер патенту: 105091
Опубліковано: 10.03.2016
Автори: Лаврінчук Олександр Васильович, Ракушев Михайло Юрійович
Формула / Реферат
1. Спосіб визначення параметрів зйомки космічним апаратом видового спостереження, згідно з яким здійснюють розрахунок просторово-часових параметрів детальної зйомки заданих ділянок поверхні Землі космічним апаратом видового спостереження високої просторової розрізненості, що управляється за координатно-часовим методом при неможливості автономної навігації космічного апарата за інформацією від супутникових навігаційних систем, який відрізняється тим, що просторово-часові параметри зйомки заданої ділянки космічним апаратом, які визначені за умов можливості автономної навігації космічного апарата, змінюються шляхом збільшення часового інтервалу зйомки без зміни просторових параметрів зйомки на основі врахування похибок прогнозування руху космічного апарата вздовж орбіти.
2. Спосіб визначення параметрів зйомки космічним апаратом видового спостереження, за п. 1, який відрізняється тим, що похибки прогнозування руху космічного апарата вздовж орбіти оцінюються за стохастичною динамічною моделлю руху космічного апарата, яка враховує випадкові флуктуації густини атмосфери та імовірнісні характеристики початкових умов руху космічного апарата.
Текст
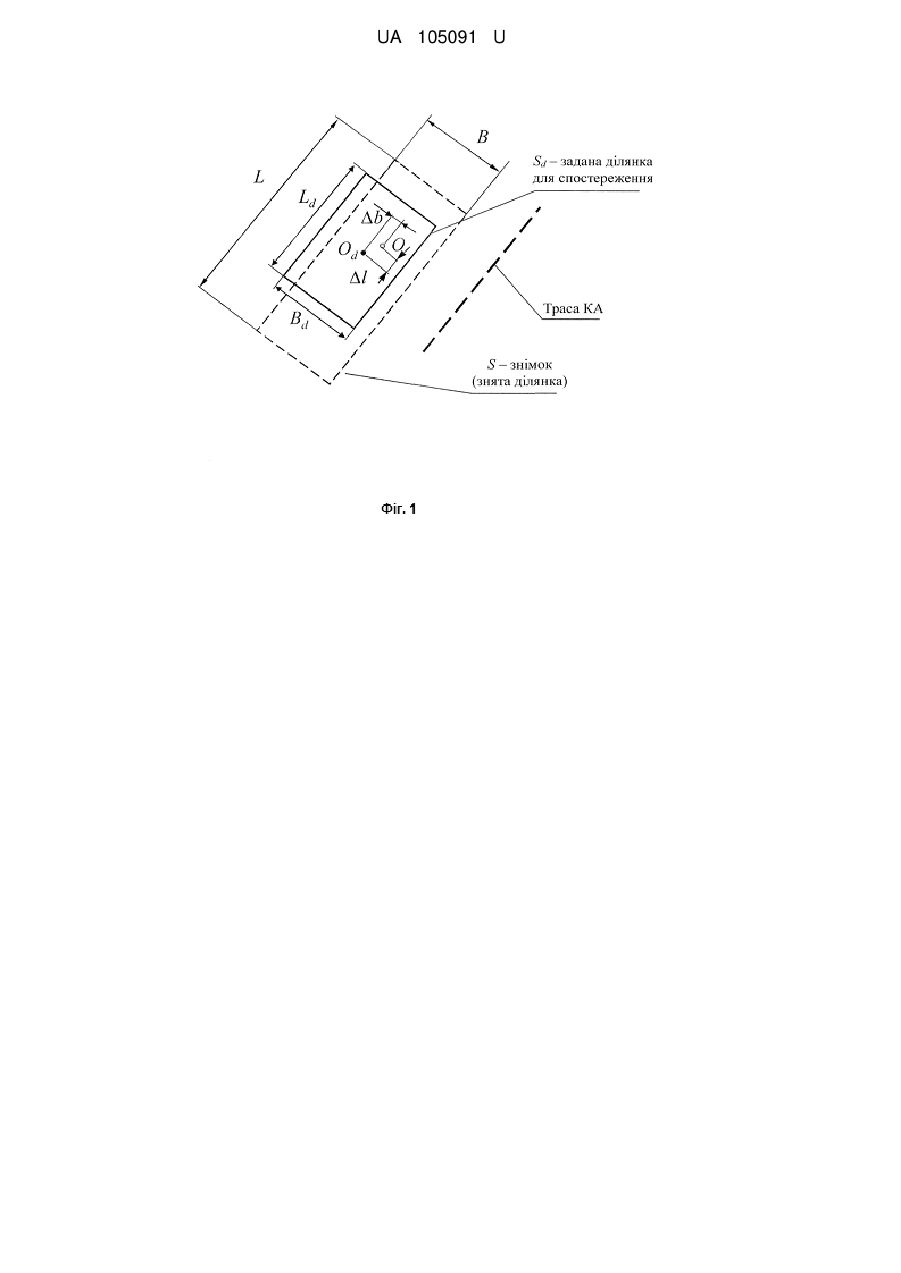
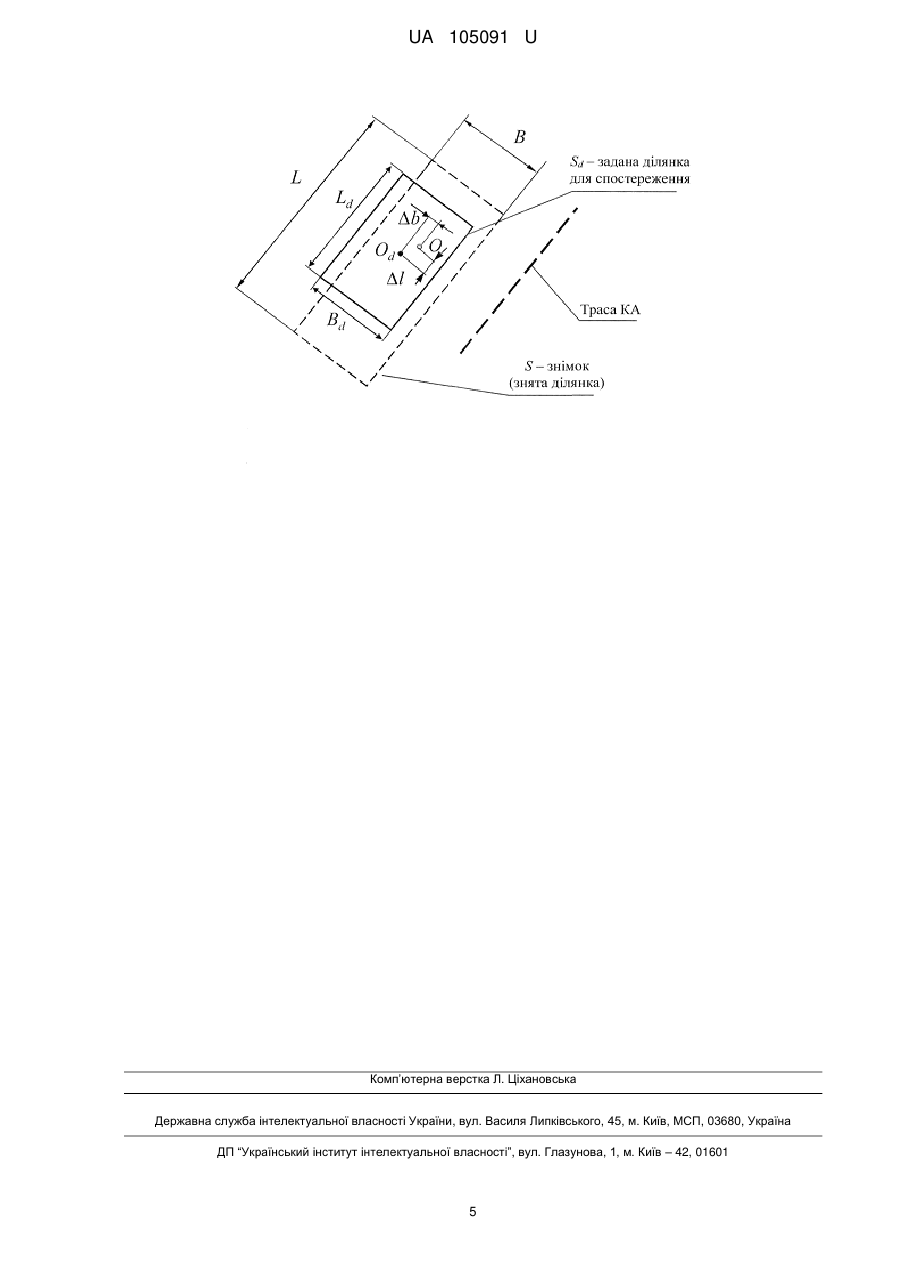
Реферат: Спосіб визначення параметрів зйомки космічним апаратом видового спостереження, згідно з яким здійснюють розрахунок просторово-часових параметрів детальної зйомки заданих ділянок поверхні Землі космічним апаратом видового спостереження високої просторової розрізненості, що управляється за координатно-часовим методом при неможливості автономної навігації космічного апарата за інформацією від супутникових навігаційних систем. Просторово-часові параметри зйомки заданої ділянки космічним апаратом, які визначені за умов можливості автономної навігації космічного апарата, змінюються шляхом збільшення часового інтервалу зйомки без зміни просторових параметрів зйомки на основі врахування похибок прогнозування руху космічного апарата вздовж орбіти. UA 105091 U (12) UA 105091 U UA 105091 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до космічної галузі й може застосовуватися для планування роботи цільової апаратури космічних апаратів (КА) видового спостереження високої просторової розрізненості при проведенні детальної зйомки, які управляються за координатночасовим методом при неможливості автономної навігації КА за інформацією від супутникових навігаційних систем. Відомий спосіб визначення параметрів зйомки КА видового спостереження [1]. Як і в запропонованому способі, у відомому способі здійснюють розрахунок просторово-часових параметрів детальної зйомки заданих ділянок поверхні Землі КА видового спостереження високої просторової розрізненості, при неможливості автономної навігації КА за інформацією від супутникових навігаційних систем. Але, на відміну від заявленого способу, у відомому способі розрахунок просторово-часових параметрів зйомки заданої ділянки КА здійснюють при проведенні автономної навігації КА за полем, що утворене штучними наземними джерелами електромагнітного випромінювання. Це призводить до необхідності встановлення на борту КА додаткової складної апаратури, та дублюванні (чи взагалі відмові) від автономної навігації за супутниковими навігаційними системами, технологія якої зараз широко використовується і є, у порівнянні із попередньою, відносно простою за технічною реалізацією. Таким чином, суттєвими недоліками відомого способу є значне ускладнення бортової апаратури КА - нераціональне використання наявного бортового ресурсу КА. Найбільш близьким способом, вибрано за прототип, є спосіб визначення параметрів зйомки КА видового спостереження [2]. У способі-прототипі, як і у заявленому способі, здійснюють розрахунок просторово-часових параметрів детальної зйомки заданих ділянок поверхні Землі КА видового спостереження високої просторової розрізненості на основі врахування похибок прогнозування руху КА вздовж орбіти. Але, на відміну від заявленого способу, у способі-прототипі, по-перше, просторово-часові параметри зйомки заданої ділянки КА визначаються без врахування вже розрахованих параметрів за умов можливості автономної навігації КА, та, по-друге, окремо визначаються похибки прогнозування руху КА вздовж орбіти за рахунок флуктуацій густини атмосфери і похибок задання початкових умов руху КА, а саме: за рахунок флуктуацій густини атмосфери на основі апостеріорних балістичних даних польоту КА, за рахунок похибок завдання початкових умов руху КА - на основі динамічної моделі руху КА з врахуванням третього та четвертого центральних моментів. Це призводить до невикористання попередньо розрахованих просторово-часових параметрів зйомки. Крім того, внаслідок окремого врахування впливу похибок за рахунок флуктуацій густини атмосфери і похибок завдання початкових умов руху КА, додатково знижується точність отриманих оцінок (отримані оцінки є завищеними). Таким чином, суттєвими недоліками способу-прототипу є низька точність при високій обчислювальній складності його реалізації нераціональне використання наявного бортового ресурсу КА. В основу корисної моделі поставлено задачу шляхом удосконалення визначення просторово-часових параметрів зйомки заданої ділянки КА видового спостереження через збільшення часового інтервалу зйомки без зміни просторових параметрів зйомки на основі врахування похибок прогнозування руху КА вздовж орбіти, що оцінені за стохастичною динамічною моделлю руху, забезпечити гарантоване проведення зйомки заданих ділянок зі зниженими витратами бортового ресурсу. Суть корисної моделі в способі визначення параметрів зйомки КА видового спостереження, згідно з яким здійснюють розрахунок просторово-часових параметрів детальної зйомки заданих ділянок поверхні Землі КА видового спостереження високої просторової розрізненості, що управляється за координатно-часовим методом при неможливості автономної навігації КА за інформацією від супутникових навігаційних систем, досягається тим, що просторово-часові параметри зйомки заданої ділянки КА, які визначені за умов можливості автономної навігації КА, змінюються шляхом збільшення часового інтервалу зйомки без зміни просторових параметрів зйомки на основі врахування похибок прогнозування руху КА вздовж орбіти, що оцінені за стохастичною динамічною моделлю руху із врахуванням випадкових флуктуацій густини атмосфери та імовірнісних характеристик початкових умов руху КА. При координатно-часовому методі управління КА видового спостереження високої просторової розрізненості на наземних засобах за заявками користувачів на детальну зйомку заданих ділянок поверхні Землі, використовуючи детерміновану динамічну модель збуреного руху КА, розраховуються просторово-часові параметри зйомки таких ділянок. При проведенні розрахунків, для мінімізації витрат наявного бортового ресурсу, виходять із умови рівності геометричних розмірів знімка та заданої для зйомки ділянки (креслення) 1 UA 105091 U B B d ,L L d , (1) де B , L - розміри знімка (знятої ділянки); Bd,L , розміри заданої ділянки для спостереження, dx f ( x, t ), t t 0 , x( t 0 ) x 0 , dt (2) 5 де x x( t ) - прогнозовані параметри (траєкторія) руху КА; x 0 - початкові умови руху КА; f ( x, t ) - функція, яка враховує сили, що діють на КА, t d, d / d,d ( x(t ), d, d) , 10 (3) де d , d - географічні координаті (широта та довгота) центру заданої ділянки; (…) алгоритм (функція) за яким проводиться визначення параметрів зйомки КА; t d , t d , d , d просторово-часові параметри зйомки заданої ділянки (прогнозований час зйомки, тривалість зйомки, кути орієнтації бортової апаратури спостереження КА за креном та тангажем). В (3) тривалість зйомки, відповідно з (1), визначається як 15 L d Vka ( t d )t d t d 20 Ld , Vka (4) де Vka - швидкість КА відносно Землі; L d - протяжність заданої ділянки. Розраховані просторово-часові параметри прив'язуються до бортової секундної мітки та передаються на борт КА. За можливості автономної навігації КА за інформацією від супутникових навігаційних систем, бортова система управління на основі використання інформації від апаратури автономної супутникової навігації відносно бортової секундної мітки формує часову команду (уставку) на вмикання апаратури спостереження для знімання заданої ділянки як функції часу. При цьому похибки розсуміщення знімка та заданої ділянки задовольняють умові (фіг. 1) 25 b Bd,l L d , (5) тоді задана ділянка S d гарантовано знаходиться на знімку S P(Sd St d, d,d,B Bd,L L d ) 1 , 30 35 де P - ймовірність того, що задана ділянка спостереження знаходиться на знімку. При неможливості автономної навігації і, як наслідок, неможливості формування часової уставки, умова (5) не виконується (похибки стають співрозмірними із розміром знімка), що призводить до невиконання КА свого цільового завдання - задана для зйомки ділянка не знаходиться на знімку (не виконується (6)). Основний вклад у похибки розсуміщення b , l (фіг. 1) вносять похибки початкових умов руху КА та варіації густини атмосфери, причому їх значення вздовж траєкторії значно більше за інші напрямки b l. 40 (7) Для компенсації впливу зазначених похибок розрахунок параметрів зйомки проводиться виходячи із умови збільшення тривалості проведення зйомки, тобто розмір знімка вздовж траєкторії КА задається більшим за довжину заданої для зйомки ділянки (креслення) B B d ,L L d . 45 (6) (8) Для оцінки значення похибок прогнозування руху КА береться стохастична динамічна модель руху КА у вигляді 2 UA 105091 U dx f ( x, t ) q( x, t )( t ), t t 0 , x( t 0 ) x 0 ,K x 0 ( t ) 0,N ( t )( t ) , , dt (9) де x x( t ) - випадкові прогнозовані параметри (траєкторія) руху КА; x 0 ,K x0 , - математичне сподівання та кореляційна матриця початкових умов руху ΚΑ; (t ) - білий шум із заданими 5 характеристиками (нульовим математичним сподіванням та кореляційною функцією N ( t )( ) ; N ( t ) інтенсивність білого шуму; () - дельта-функція Дірака; f ( x, t ) - функція, яка враховує 10 сили, що діють на КА; q( xt) - функція, яка враховує варіації густити атмосфери. Розрахунок статистичних характеристик моделі (9) проводиться на основі методу лінеаризації відносно середнього руху та методу кореляційних перетворень. Такий підхід забезпечує задовільну точність при допустимій обчислювальній складності та має вигляд dx dt f ( x, t ), x( t 0 ) x 0 , t t 0 ; T dK x f ( x, t ) K K f ( x, t ) q( x, t )N ( t )qT ( x, t ),K ( t ) K , x x 0 x0 dt x x 15 (10) де x x(t ),K x X x (t ) , Κχ - Kx(t) - математичне сподівання та кореляційна матриця прогнозованого положення КА. Рівняння (2) та перше рівняння в (9) тотожні, тому можливо використовувати результати розрахунку просторово-часових параметрів зйомки К А (3) – t d , t d , d , d . Після рішення системи (10) проводиться визначення характеристик похибок прогнозування руху КА вздовж траєкторії у вигляді l 3l ( x(t d ),K x (t d )) , (11) 20 де l - середньоквадратичне відхилення нормальної випадкової величини похибки прогнозування руху КА вздовж орбіти. На основі (11) оцінюється похибка визначення часу зйомки 3l , l Vka ( t d ) Vka (12) 25 Далі часові параметри зйомки змінюються за співвідношеннями: прогнозований час зйомки td 31 Vka (13), тривалість зйомки 30 t d 35 6l , Vka (14) Експериментальне підтвердження. 1. З метою перевірки було проведено моделювання процесу зйомки КА видового спостереження запропонованим способом і способом-прототипом на часовому інтервалі 1-3 0 доби в рік високої сонячної активності. Параметри орбіти КА: висота 600 км, нахил 98 , ексцентриситет 0,01, балістичний коефіцієнт -0,1. Геометричні розміри заданих ділянок поверхні Землі: ширина B d -10…15 км, довжина L d — 10…15 км. В моделі руху КА задано поле 4×4 гармонік розкладу геопотенціалу Землі у ряд за сферичними функціями та враховані сили аеродинамічного опору атмосфери відповідно до ГОСТ-25645.101-83. 3 UA 105091 U Із визначеними за (13), (14) просторово-часовими параметрами зйомки КА (3), задана ділянка для спостереження S d буде гарантовано знаходитись на знімку S 3 l 6 l P S d St d , t d , d , d ,B d B,L L d Vka 6l 0,9 , Vka Vka 5 10 15 20 25 (15) де P - ймовірність того, що задана ділянка для спостереження знаходиться на знімку. У порівнянні зі способом-прототипом, отримані за запропонованим способом оцінки похибок прогнозування руху КА потребують на 30…40 % менших обчислювальних витрат та є на 5…10 % меншими. Зазначене характеризує зменшення витрат бортового ресурсу КА: обчислювальних засобів (зменшення обчислювальної складності розрахунків), інформаційного та енергетичного (зменшення потрібного часового інтервалу зйомки). Аналіз наведених результатів показує, що визначення параметрів зйомки КА видового спостереження запропонованим способом дозволяє гарантовано провести зйомку заданих ділянок зі зменшеними витратами бортового ресурсу. Таким чином, проведені удосконалення дозволяють вирішити поставлену задачу гарантованої зйомки заданих ділянок КА видового спостереження зі зменшеними витратами бортового ресурсу, при неможливості автономної навігації КА за інформацією від супутникових навігаційних систем. ДЖЕРЕЛА ІНФОРМАЦІЇ: 1. Стрельников С.В. Технология измерения параметров траектории низкоорбитальных КА по телевизионным сигналам / СВ. Стрельников // Двойные технологии. - Санкт-Петербург, 2004. - № 3.- С. 11-15 - аналог. 2. Ракушев М.Ю., Манько О.В., Завада А.А. Спосіб розрахунку ймовірності накриття району спостереження полем зору бортової апаратури космічних апаратів оптико-електронного спостереження / М.Ю. Ракушев, О.В. Манько, А.А. Завада // Системи управління, навігації та зв'язку. Київ: ДП "Центральний науково-дослідний інститут навігації і управління", 2011. - Вип. 1(17). - С 120-124-прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 1. Спосіб визначення параметрів зйомки космічним апаратом видового спостереження, згідно з яким здійснюють розрахунок просторово-часових параметрів детальної зйомки заданих ділянок поверхні Землі космічним апаратом видового спостереження високої просторової розрізненості, що управляється за координатно-часовим методом при неможливості автономної навігації космічного апарата за інформацією від супутникових навігаційних систем, який відрізняється тим, що просторово-часові параметри зйомки заданої ділянки космічним апаратом, які визначені за умов можливості автономної навігації космічного апарата, змінюються шляхом збільшення часового інтервалу зйомки без зміни просторових параметрів зйомки на основі врахування похибок прогнозування руху космічного апарата вздовж орбіти. 2. Спосіб визначення параметрів зйомки космічним апаратом видового спостереження за п. 1, який відрізняється тим, що похибки прогнозування руху космічного апарата вздовж орбіти оцінюються за стохастичною динамічною моделлю руху космічного апарата, яка враховує випадкові флуктуації густини атмосфери та імовірнісні характеристики початкових умов руху космічного апарата. 4 UA 105091 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 21/24, G01C 21/00, G01S 11/00
Мітки: апаратом, спостереження, видового, параметрів, зйомки, космічним, визначення, спосіб
Код посилання
<a href="https://ua.patents.su/7-105091-sposib-viznachennya-parametriv-zjjomki-kosmichnim-aparatom-vidovogo-sposterezhennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів зйомки космічним апаратом видового спостереження</a>
Спосіб установлення зв’язку низькоорбітальним космічним апаратом з супутником-ретранслятором
Номер патенту: 31413
Опубліковано: 10.04.2008
Автори: Ожінський Віктор Васильович, Богом'я Володимир Іванович, Засуха Сергій Олексійович, Загорулько Олександр Миколайович
МПК: B64G 1/24
Мітки: апаратом, супутником-ретранслятором, низькоорбітальним, космічним, спосіб, зв'язку, установлення
Формула / Реферат:
Спосіб установлення зв'язку низькоорбітальним космічним апаратом (КА) з супутником-ретранслятором, який полягає в тому, що за поточними даними про рух низькоорбітального КА, які формуються автономною системою навігації, та просторовими (координатними) даними супутника-ретранслятора (СР), заздалегідь записаними в бортовий запам'ятовуючий пристрій, система керування антенними системами обраховує кути напряму на СР та здійснює наведення антенних...
Система керування космічним літальним апаратом

Номер патенту: 67029
Опубліковано: 15.06.2004
Автори: Бандура Іван Миколайович, Овсяннікова Ірина Валеріївна, Погудін Андрій Володимирович, Батаєв Віктор Олександрович
МПК: B64G 1/24
Мітки: космічним, літальним, апаратом, керування, система
Формула / Реферат:
Система керування космічним літальним апаратом, що містить датчик кута та датчик кутових швидкостей, які з'єднані через перший і другий масштабні блоки з формувачем закону керування, і підсилювач потужності, яка відрізняється тим, що в неї введені послідовно включені інтегратор, порівнюючий пристрій, з'єднаний через підсилювач потужності з ротором електродвигуна, на роторі встановлений тахометр, який з'єднаний з другим входом порівнюючого...
Спосіб підвищення точності визначення параметрів руху космічного апарата
Номер патенту: 56376
Опубліковано: 10.01.2011
Автори: Парфенюк Василь Григорович, Ожінський Віктор Васильович, Загорулько Олександр Миколайович, Топольницький Павло Петрович
МПК: G05B 17/00
Мітки: підвищення, визначення, спосіб, руху, космічного, точності, параметрів, апарата
Формула / Реферат:
Спосіб підвищення точності визначення параметрів руху космічного апарата, який відрізняється тим, що в апаратурі супутникової навігації дані із навігаційного обчислювача надходять до блока робастної обробки, який проводить їх згладжування з використанням завадостійких (робастних) статистичних процедур та видає уточнені параметри руху космічного апарата.
Пристрій для керування космічним апаратом
Номер патенту: 55358
Опубліковано: 10.12.2010
Автори: Кописов Олег Едуардович, Слєкішин Сергій Євгенович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Семука Олександр Григорович
МПК: B64G 1/28
Мітки: керування, пристрій, апаратом, космічним
Формула / Реферат:
Пристрій для керування космічним апаратом, що містить цифровий керуючий обчислювач, перший та другий виходи якого під'єднані до першого та другого цифро-аналогових перетворювачів, послідовно з'єднаних з першими та другими відповідно підсилювачами потужності та двигунами-маховиками, кожен з яких містить електричний привід, маховик та датчик обертів, при цьому виходи двох двигунів-маховиків під'єднані до першого та другого входів...
Спосіб установлення зв`язку космічним апаратом з наземною станцією керування
Номер патенту: 25020
Опубліковано: 25.07.2007
Автори: Загорулько Олександр Миколайович, Козелкова Катерина Сергіївна, Богом'я Володимир Іванович, Моргун Олександр Андрійович
МПК: B64G 1/24
Мітки: космічним, установлення, зв'язку, апаратом, наземною, спосіб, керування, станцією
Формула / Реферат:
Спосіб установлення зв'язку космічним апаратом (КА) з наземною станцією керування, який полягає в тому, що моменти вмикання (вимикання) сеансної апаратури відбуваються при досягненні трасою польоту (підсупутниковою точкою орбіти КА) координат початку (кінця) зони радіоогляду наземної станції керування, заздалегідь записаних в бортовий запам'ятовуючий пристрій, який відрізняється тим, що використовуються поточні дані про рух КА в гринвіцькій...