Спосіб струмопараметричного узгодження швидкостей, взаємозв’язаних через механічне обладнання багатодвигунних електромеханічних систем
Номер патенту: 110206
Опубліковано: 10.12.2015
Автори: Калюжний Володимир Владиславович, Андрієнко Петро Дмитрович, Андрієнко Данил Сергійович, Калюжний Сергій Володимирович
Формула / Реферат
Спосіб струмопараметричного узгодження швидкостей взаємозв'язаних через механічне обладнання багатодвигунних електромеханічних систем, які мають щонайменше два електродвигуни змінного струму, роторні обмотки двигунів приєднують до входу окремих вентильних комплектів, а виходи постійного струму усіх вентильних комплектів з'єднують узгоджено-паралельно та приєднують через енергопоглинаючий опір чи інвертор, ведений мережею змінної напруги, до виходу загального струмопараметричного вентильного перетворювача, який відрізняється тим, що використовують двигуни змінногоструму з короткозамкненим ротором, статорні обмотки двигунів пофазно об'єднують та підключають до виходу загального частотно-струмового перетворювача, в систему керування котрого вводять сигнал задання швидкості електромеханічної системи та сигнал негативного зворотного зв'язку за швидкістю одного з двигунів.
Текст
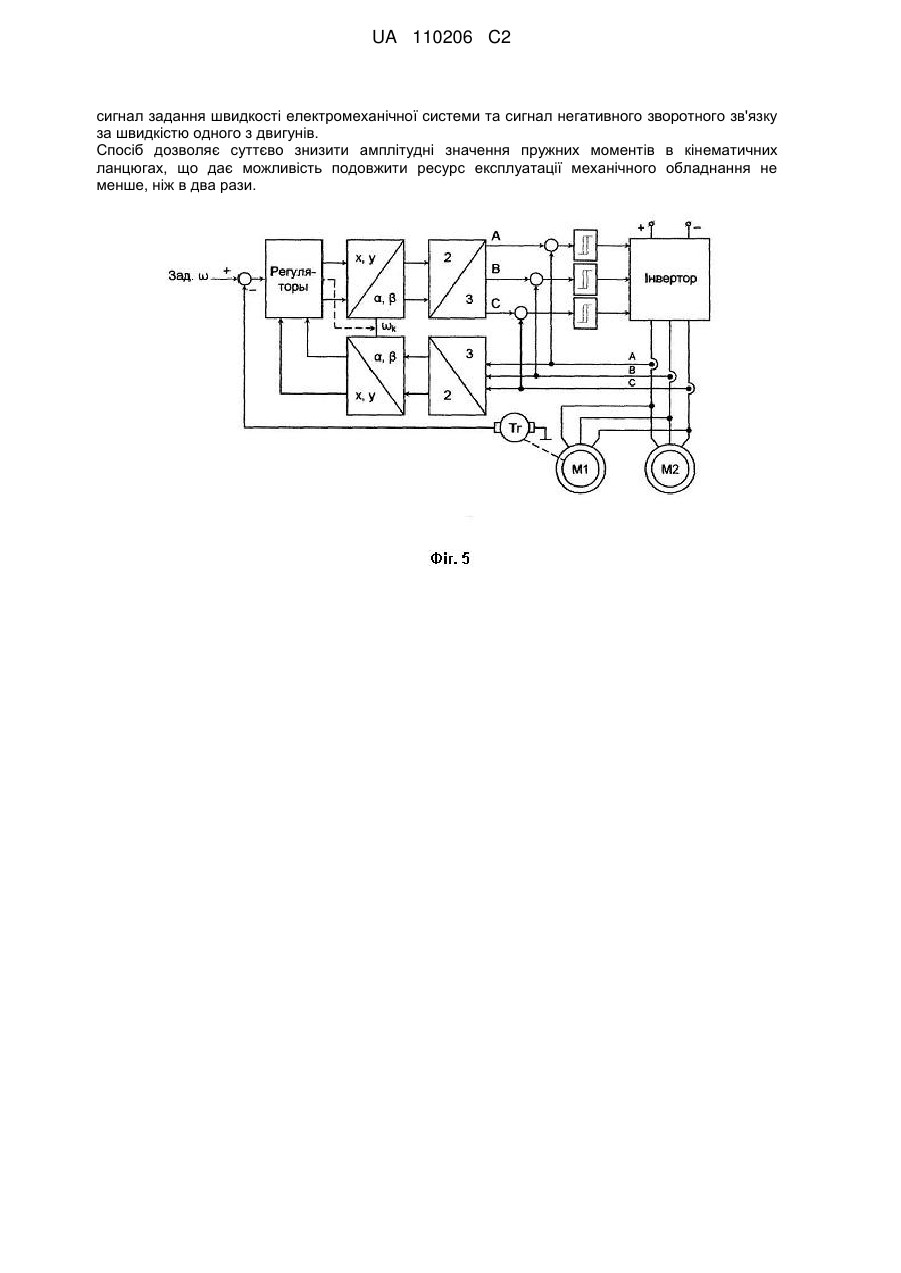
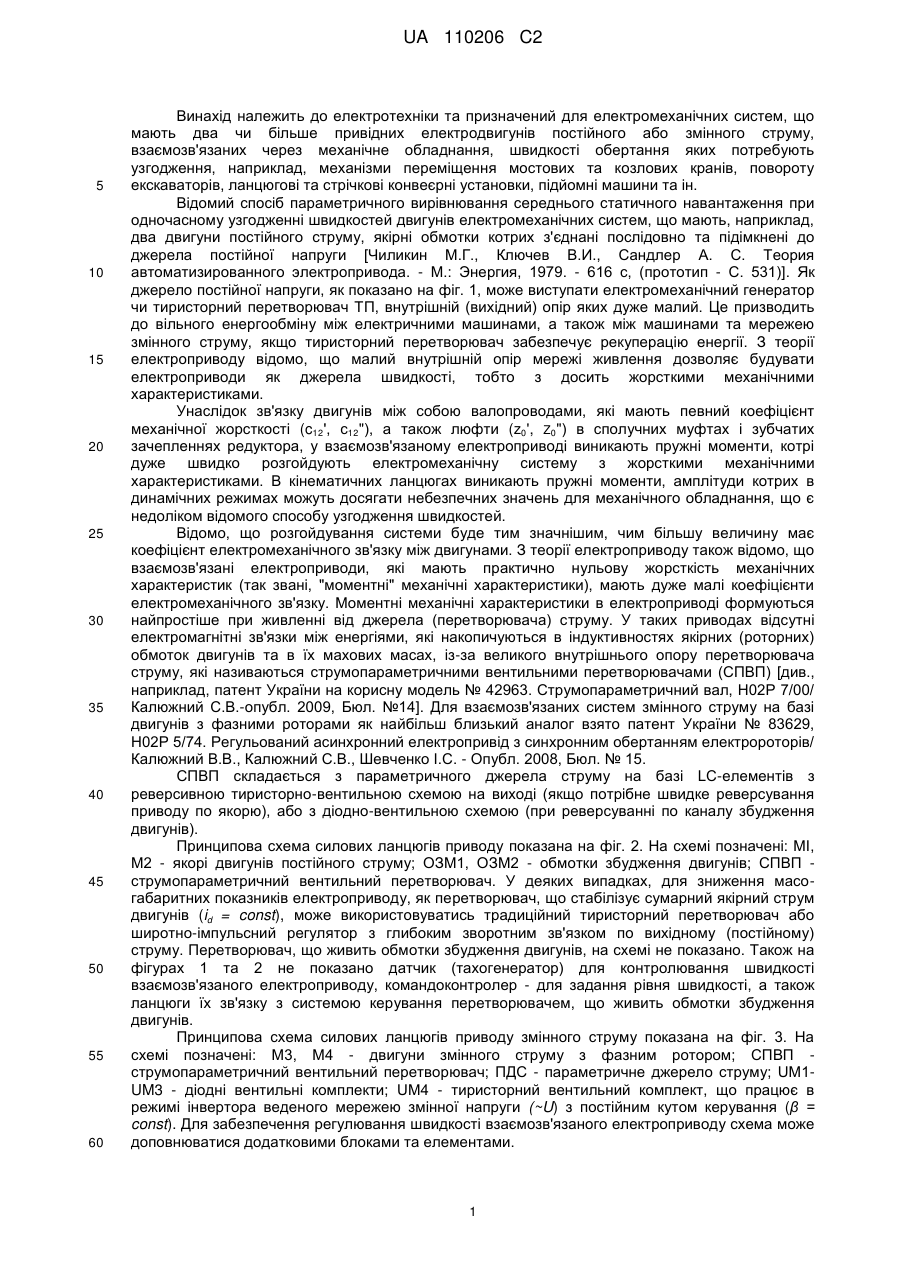
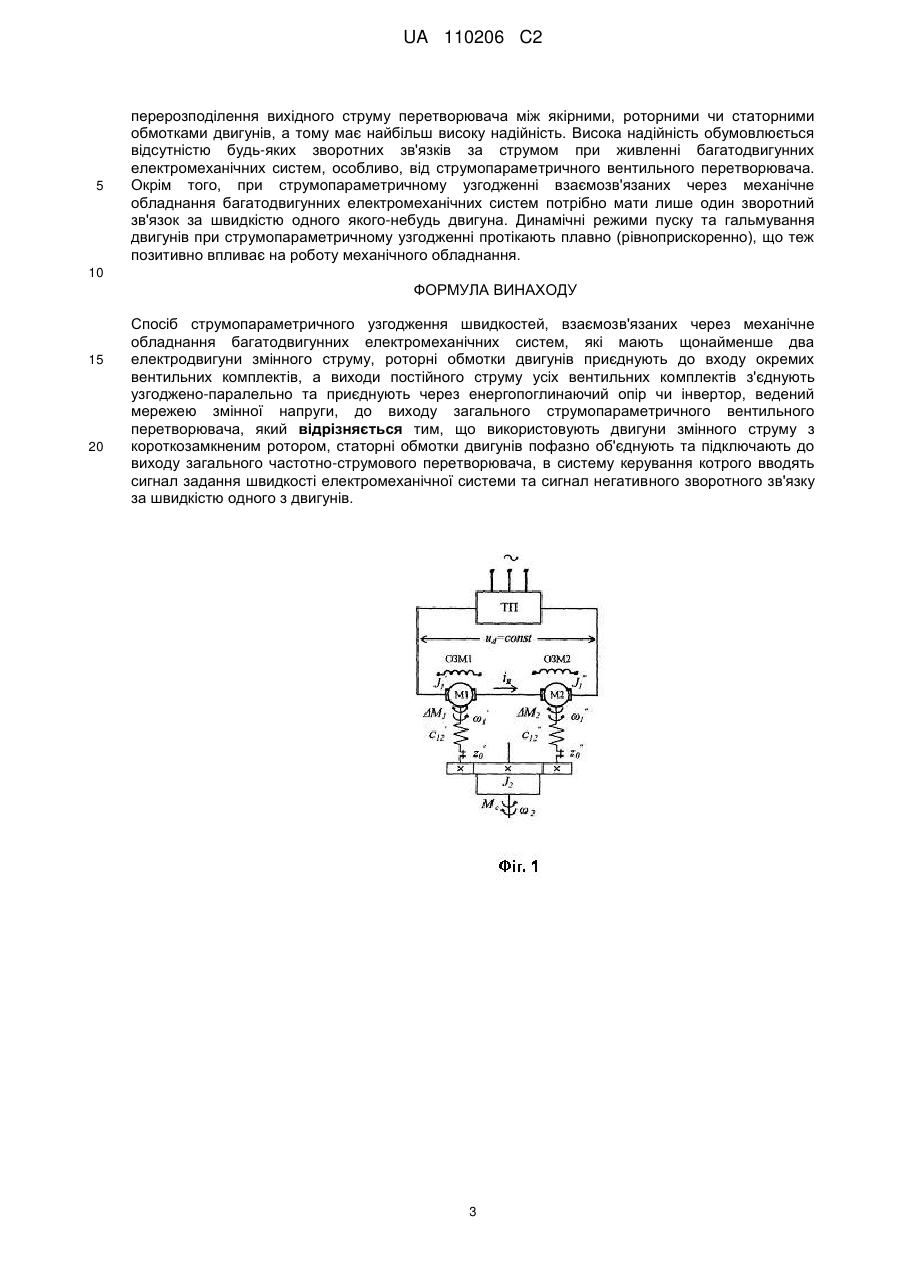
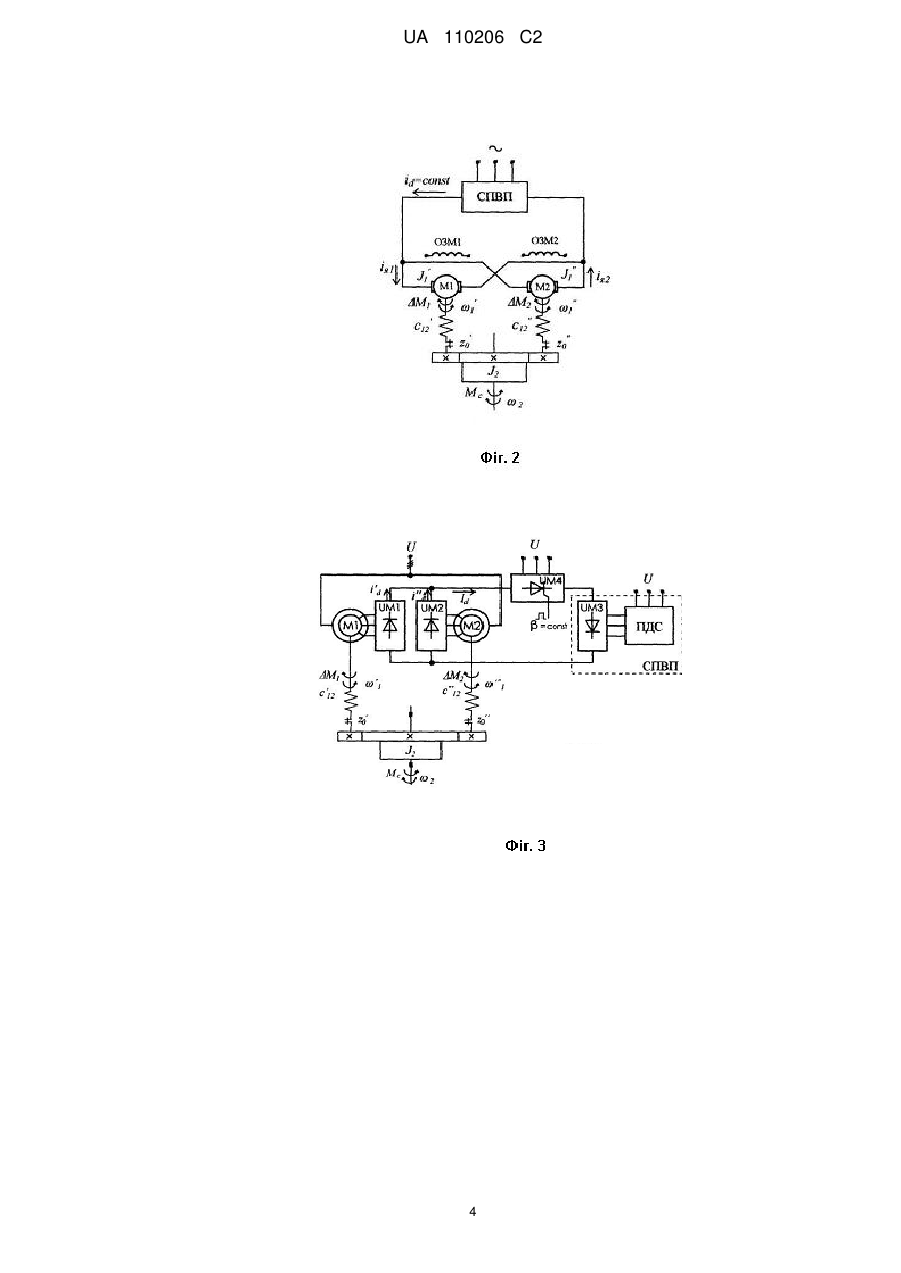
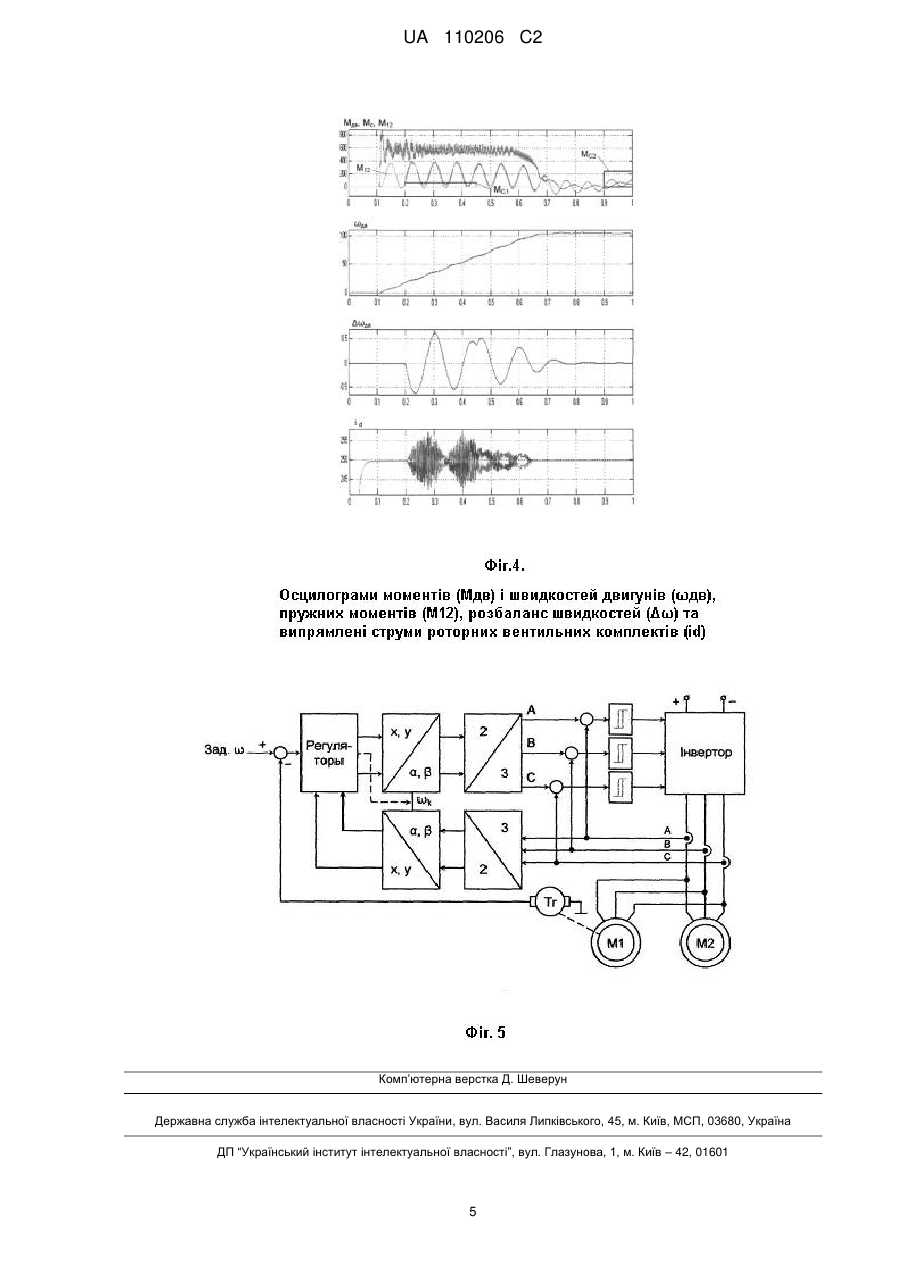
Реферат: В спосіб струмопараметричного узгодження швидкостей взаємозв'язаних через механічне обладнання багатодвигунних електромеханічних систем, які мають щонайменше два електродвигуни змінного струму, роторні обмотки двигунів приєднують до входу окремих вентильних комплектів, а виходи постійного струму усіх вентильних комплектів з'єднують узгоджено-паралельно та приєднують через енергопоглинаючий опір чи інвертор, ведений мережею змінної напруги, до виходу загального струмопараметричного вентильного перетворювача. Згідно з винаходом використовують двигуни змінного струму з короткозамкненим ротором, статорні обмотки двигунів пофазно об'єднують та підключають до виходу загального частотно-струмового перетворювача, в систему керування котрого вводять UA 110206 C2 (12) UA 110206 C2 сигнал задання швидкості електромеханічної системи та сигнал негативного зворотного зв'язку за швидкістю одного з двигунів. Спосіб дозволяє суттєво знизити амплітудні значення пружних моментів в кінематичних ланцюгах, що дає можливість подовжити ресурс експлуатації механічного обладнання не менше, ніж в два рази. UA 110206 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до електротехніки та призначений для електромеханічних систем, що мають два чи більше привідних електродвигунів постійного або змінного струму, взаємозв'язаних через механічне обладнання, швидкості обертання яких потребують узгодження, наприклад, механізми переміщення мостових та козлових кранів, повороту екскаваторів, ланцюгові та стрічкові конвеєрні установки, підйомні машини та ін. Відомий спосіб параметричного вирівнювання середнього статичного навантаження при одночасному узгодженні швидкостей двигунів електромеханічних систем, що мають, наприклад, два двигуни постійного струму, якірні обмотки котрих з'єднані послідовно та підімкнені до джерела постійної напруги [Чиликин М.Г., Ключев В.И., Сандлер А. С. Теория автоматизированного электропривода. - Μ.: Энергия, 1979. - 616 с, (прототип - С. 531)]. Як джерело постійної напруги, як показано на фіг. 1, може виступати електромеханічний генератор чи тиристорний перетворювач ТП, внутрішній (вихідний) опір яких дуже малий. Це призводить до вільного енергообміну між електричними машинами, а також між машинами та мережею змінного струму, якщо тиристорний перетворювач забезпечує рекуперацію енергії. З теорії електроприводу відомо, що малий внутрішній опір мережі живлення дозволяє будувати електроприводи як джерела швидкості, тобто з досить жорсткими механічними характеристиками. Унаслідок зв'язку двигунів між собою валопроводами, які мають певний коефіцієнт механічної жорсткості (c12', с12"), а також люфти (z0', Z0") в сполучних муфтах і зубчатих зачепленнях редуктора, у взаємозв'язаному електроприводі виникають пружні моменти, котрі дуже швидко розгойдують електромеханічну систему з жорсткими механічними характеристиками. В кінематичних ланцюгах виникають пружні моменти, амплітуди котрих в динамічних режимах можуть досягати небезпечних значень для механічного обладнання, що є недоліком відомого способу узгодження швидкостей. Відомо, що розгойдування системи буде тим значнішим, чим більшу величину має коефіцієнт електромеханічного зв'язку між двигунами. З теорії електроприводу також відомо, що взаємозв'язані електроприводи, які мають практично нульову жорсткість механічних характеристик (так звані, "моментні" механічні характеристики), мають дуже малі коефіцієнти електромеханічного зв'язку. Моментні механічні характеристики в електроприводі формуються найпростіше при живленні від джерела (перетворювача) струму. У таких приводах відсутні електромагнітні зв'язки між енергіями, які накопичуються в індуктивностях якірних (роторних) обмоток двигунів та в їх махових масах, із-за великого внутрішнього опору перетворювача струму, які називаються струмопараметричними вентильними перетворювачами (СПВП) [див., наприклад, патент України на корисну модель № 42963. Струмопараметричний вал, H02P 7/00/ Калюжний С.В.-опубл. 2009, Бюл. №14]. Для взаємозв'язаних систем змінного струму на базі двигунів з фазними роторами як найбільш близький аналог взято патент України № 83629, H02P 5/74. Регульований асинхронний електропривід з синхронним обертанням електророторів/ Калюжний В.В., Калюжний С.В., Шевченко І.С. - Опубл. 2008, Бюл. № 15. СПВП складається з параметричного джерела струму на базі LC-елементів з реверсивною тиристорно-вентильною схемою на виході (якщо потрібне швидке реверсування приводу по якорю), або з діодно-вентильною схемою (при реверсуванні по каналу збудження двигунів). Принципова схема силових ланцюгів приводу показана на фіг. 2. На схемі позначені: МІ, М2 - якорі двигунів постійного струму; ОЗМ1, ОЗМ2 - обмотки збудження двигунів; СПВП струмопараметричний вентильний перетворювач. У деяких випадках, для зниження масогабаритних показників електроприводу, як перетворювач, що стабілізує сумарний якірний струм двигунів (id = const), може використовуватись традиційний тиристорний перетворювач або широтно-імпульсний регулятор з глибоким зворотним зв'язком по вихідному (постійному) струму. Перетворювач, що живить обмотки збудження двигунів, на схемі не показано. Також на фігурах 1 та 2 не показано датчик (тахогенератор) для контролювання швидкості взаємозв'язаного електроприводу, командоконтролер - для задання рівня швидкості, а також ланцюги їх зв'язку з системою керування перетворювачем, що живить обмотки збудження двигунів. Принципова схема силових ланцюгів приводу змінного струму показана на фіг. 3. На схемі позначені: M3, M4 - двигуни змінного струму з фазним ротором; СПВП струмопараметричний вентильний перетворювач; ПДС - параметричне джерело струму; UM1UM3 - діодні вентильні комплекти; UM4 - тиристорний вентильний комплект, що працює в режимі інвертора веденого мережею змінної напруги (~U) з постійним кутом керування (β = const). Для забезпечення регулювання швидкості взаємозв'язаного електроприводу схема може доповнюватися додатковими блоками та елементами. 1 UA 110206 C2 5 10 15 20 25 30 35 40 45 50 55 60 Недоліком СПВП є те, що він має на виході стабілізований струм постійного виду, а тому не може бути використаний для струмопараметричного узгодження швидкостей асинхронних двигунів з короткозамкненим ротором. В основу винаходу поставлена задача розробки способу живлення багатодвигунних взаємозв'язаних електромеханічних систем на базі двигунів з короткозамкненим ротором, призначеного для узгодження швидкостей привідних двигунів, з метою здобуття режиму само налагодження швидкостей двигунів при мінімізації пружних моментів у кінематичних передачах і, як наслідок, зменшення зносу механічного обладнання. Поставлена задача досягається тим, що для багатодвигунної електромеханічної системи використовують спосіб струмопараметричного узгодження швидкостей двигунів за рахунок перерозподілу струмів статорних обмоток, для чого останні пофазно об'єднують та підключають до виходу загального частотно-струмового перетворювача, в систему керування котрого вводять сигнал задання швидкості електромеханічної системи та сигнал негативного зворотного зв'язку за швидкістю одного з двигунів. Функціональна схема побудови взаємозв'язаного електроприводу на базі двигунів змінного струму з короткозамкненим ротором та живленням їх від загального частотнострумового перетворювача з векторним керуванням наведена на фіг. 5. Струмопараметричний принцип узгодження швидкостей, взаємозв'язаних через механічне обладнання, двигунів виконується за рахунок забезпечення роботи автономного інвертора в режимі джерела струму. Для цього система керування частотно-струмового перетворювача має на своєму виході релейні елементи (РЕ1, РЕ2, РЕ3), на які подається різниця управляючих сигналів (А,В,С) по фазах сигналів (а, в, с) з датчиків дійсного вихідного фазного струму перетворювача (сумарного струму фаз статорів двигунів М5 та М6). Задання швидкості здійснюється сигналом «Зад. », а зворотній зв'язок за швидкістю електроприводу - за допомогою тахогенератору Тг. Блоки, що працюють сумісно та позначені «x,y/ », «2/3» або «3/2» « /x,y», виконують пряме та зворотне перетворення координат і фаз керування, тобто переводять систему електроприводу з нерухомої системи координат ( , ) в рухому (x,y), котру використовують при векторному керуванні частотно-струмовим електроприводом. Роботу способу струмопараметричного узгодження швидкості багатодвигунних електромеханічних систем розглянемо на прикладі схеми приводу змінного струму (фіг. 3), як найбільш теоретично складної. В схемі асинхронні двигуни М3 та М4 працюють як машини подвійного живлення: з боку статорів - від мережі незмінної напруги, а з боку роторів - від мережі незмінного струму, що забезпечується параметричним джерелом струму ПДС. При роботі діоди роторних вентильних комплектів UM1 та UM2 комутуються лінійними ЕРС фаз ротора та проти-ЕРС Ud інвертора UM4 (або падінням напруги постійного струму Іd на резисторі Rd, який може бути ввімкнений замість UM4). Струми роторних обмоток співпадають за фазою з відповідними фазними ЕРС, а їх величина визначається випрямленим струмом ld (ЗГІДНО З першим законом Кірхгофа: id' + id" = Id = const) та не залежить від ковзання ротора відносно поля статора. Електромагнітний момент кожного двигуна визначається стабільними величинами магнітного потоку статора і струму його ротора, при цьому фазні струми роторів будуть незмінні, а їх дійове значення буде визначатись моментом навантаження того чи іншого двигуна. Завдяки сказаному, двигуни будуть рівно прискорюватись у динамічних режимах та мати узгоджене обертання. Комп'ютерне моделювання взаємозв'язаного електроприводу в середовищі Matlab / SimPowerSystems (фіг. 4) показує, що при виникненні збурення на першому з валопроводів, двигун починає просторово відставати від другого. Це призводить до відставання у часі його роторної ЕРС, яка закриває діоди випрямляча UM1 пізніше, ніж закриваються діоди UM2. Більша частина струму ПДС перетікає в роторні кола машини М3, зменшуючи його в машині М4, яка при цьому сповільнюється, а розгойдування коливань в обох валопроводах не виникає. На фіі.4 позначено: моменти (МДВ) і швидкості ДВ) двигунів; їх пружні моменти (М12); розбаланс швидкостей ( ); випрямлені струми (id) роторних вентильних комплектів UM1 та UM2. При частотно-струмовому керуванні двигунами з короткозамкненим ротором, що входять до складу взаємозв'язаних через механічне обладнання привідних систем, електромеханічні процеси мають аналогічний характер. Як показують розрахунки та промислові випробування, спосіб струмопараметричного узгодження швидкостей взаємозв'язаних через механічне обладнання багатодвигунних електромеханічних систем дозволяє суттєво знизити амплітудні значення пружних моментів в кінематичних ланцюгах, що виникають в динамічних режимах роботи. Це дає можливість подовжити ресурс експлуатації механічного обладнання не менше, ніж в два рази. Узгодження швидкостей окремих двигунів відбувається безпосередньо по силовому каналу, за рахунок 2 UA 110206 C2 5 перерозподілення вихідного струму перетворювача між якірними, роторними чи статорними обмотками двигунів, а тому має найбільш високу надійність. Висока надійність обумовлюється відсутністю будь-яких зворотних зв'язків за струмом при живленні багатодвигунних електромеханічних систем, особливо, від струмопараметричного вентильного перетворювача. Окрім того, при струмопараметричному узгодженні взаємозв'язаних через механічне обладнання багатодвигунних електромеханічних систем потрібно мати лише один зворотний зв'язок за швидкістю одного якого-небудь двигуна. Динамічні режими пуску та гальмування двигунів при струмопараметричному узгодженні протікають плавно (рівноприскоренно), що теж позитивно впливає на роботу механічного обладнання. 10 ФОРМУЛА ВИНАХОДУ 15 20 Спосіб струмопараметричного узгодження швидкостей, взаємозв'язаних через механічне обладнання багатодвигунних електромеханічних систем, які мають щонайменше два електродвигуни змінного струму, роторні обмотки двигунів приєднують до входу окремих вентильних комплектів, а виходи постійного струму усіх вентильних комплектів з'єднують узгоджено-паралельно та приєднують через енергопоглинаючий опір чи інвертор, ведений мережею змінної напруги, до виходу загального струмопараметричного вентильного перетворювача, який відрізняється тим, що використовують двигуни змінного струму з короткозамкненим ротором, статорні обмотки двигунів пофазно об'єднують та підключають до виходу загального частотно-струмового перетворювача, в систему керування котрого вводять сигнал задання швидкості електромеханічної системи та сигнал негативного зворотного зв'язку за швидкістю одного з двигунів. 3 UA 110206 C2 4 UA 110206 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюThe method of current parametric coordination velocity interconnected via mechanical equipment multi-engine electromechanical systems
Автори англійськоюKaliuzhnyi Volodymyr Vladyslavovych, Kaliuzhnyi Serhii Volodymyrovych, Andriyenko Petro Dmytrovych, Andriyenko Danyl Serhiyovych
Назва патенту російськоюСпособ ток параметрического согласования скоростей взаимосвязанных через механическое оборудование многодвигательных электромеханических систем
Автори російськоюКалюжний Владимир Владиславович, Калюжный Сергей Владимирович, Андриенко Петр Дмитриевич, Андриенко Данил Сергеевич
МПК / Мітки
Мітки: швидкостей, спосіб, механічне, взаємозв'язаних, узгодження, обладнання, багатодвигунних, систем, електромеханічних, струмопараметричного
Код посилання
<a href="https://ua.patents.su/7-110206-sposib-strumoparametrichnogo-uzgodzhennya-shvidkostejj-vzaehmozvyazanikh-cherez-mekhanichne-obladnannya-bagatodvigunnikh-elektromekhanichnikh-sistem.html" target="_blank" rel="follow" title="База патентів України">Спосіб струмопараметричного узгодження швидкостей, взаємозв’язаних через механічне обладнання багатодвигунних електромеханічних систем</a>
Пристрій для рівноприскореного пуску і підвищення коефіцієнтів корисної дії та потужності багатодвигунних асинхронних електромеханічних систем
Номер патенту: 89030
Опубліковано: 25.12.2009
Автори: Калюжний Сергій Володимирович, Скорих Іван Митрофанович, Калюжний Володимир Владиславович
МПК: H02P 23/00
Мітки: рівноприскореного, електромеханічних, потужності, багатодвигунних, пристрій, коефіцієнтів, корисної, дії, асинхронних, пуску, систем, підвищення
Формула / Реферат:
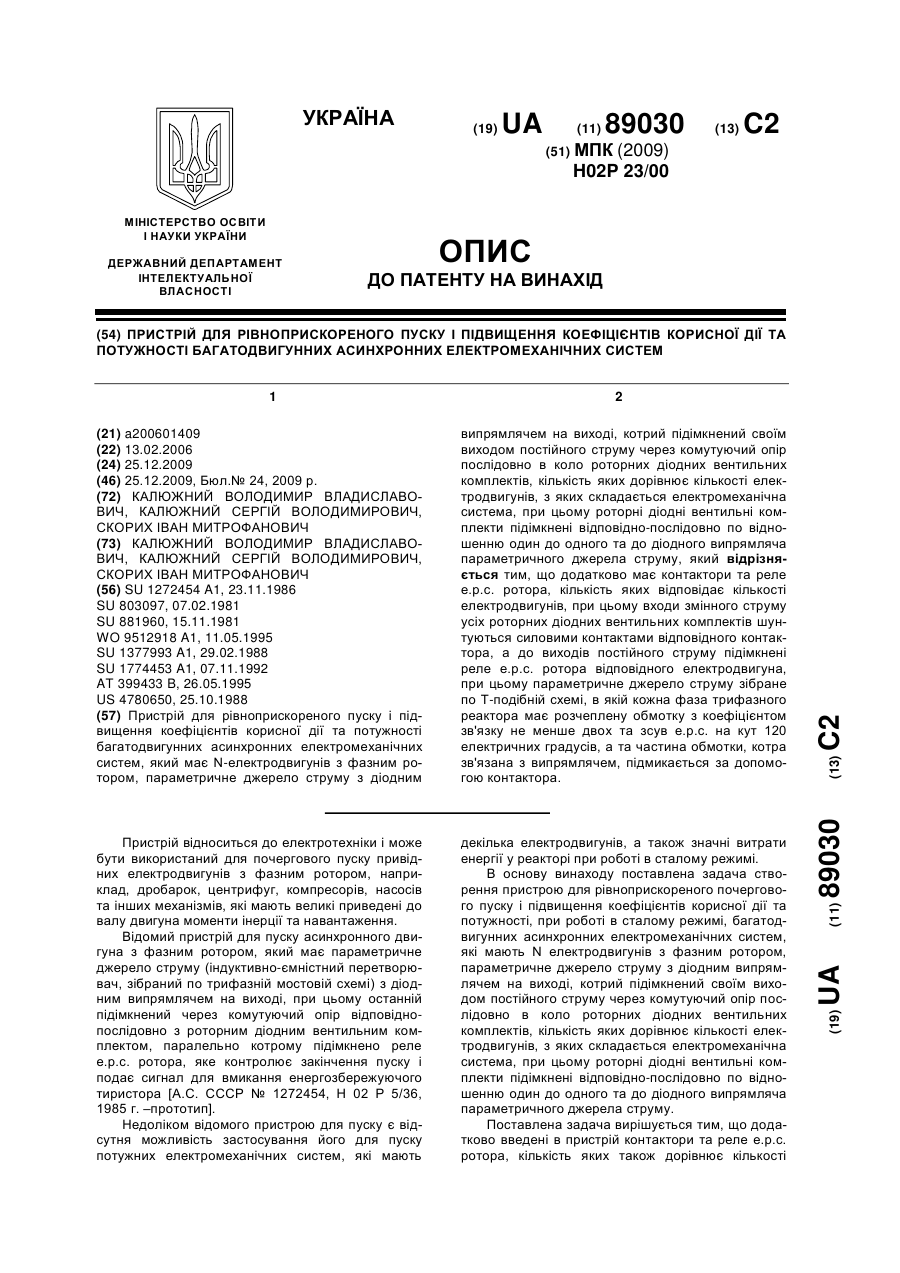
Пристрій для рівноприскореного пуску і підвищення коефіцієнтів корисної дії та потужності багатодвигунних асинхронних електромеханічних систем, який має Ν-електродвигунів з фазним ротором, параметричне джерело струму з діодним випрямлячем на виході, котрий підімкнений своїм виходом постійного струму через комутуючий опір послідовно в коло роторних діодних вентильних комплектів, кількість яких дорівнює кількості електродвигунів, з яких...
Комп’ютеризований лабораторний стенд для дослідження електропривода електромеханічних трансмісій транспортних систем
Номер патенту: 89385
Опубліковано: 25.04.2014
Автори: Артеменко Артем Миколайович, Мельников Вячеслав Олександрович, Калінов Андрій Петрович, Мамчур Дмитро Григорович
МПК: G09B 23/18, H02M 7/21
Мітки: трансмісій, лабораторний, стенд, комп`ютеризований, дослідження, електропривода, електромеханічних, транспортних, систем
Формула / Реферат:
1. Комп'ютеризований лабораторний стенд для дослідження електропривода електромеханічних трансмісій транспортних систем, який містить жорстку зварну раму, електричний двигун та пристрій навантаження, який відрізняється тим, що додатково обладнаний тяговим електричним двигуном, навантажувальним електродвигуном, який з'єднаний із тяговим електродвигуном за допомогою пасової передачі, причому живлення електричних двигунів здійснюється через...
Пристрій контролю несинхронності обертання електромеханічних систем
Номер патенту: 67650
Опубліковано: 15.06.2004
Автори: Кабанова Олена В'ячеславівна, Кучерук Володимир Юрійович, Васілевський Олександр Миколайович, Поджаренко Володимир Олександрович
МПК: G01P 3/02
Мітки: електромеханічних, несинхронності, контролю, пристрій, обертання, систем
Формула / Реферат:
Пристрій контролю несинхронності обертання електромеханічних систем, який складається з двох регуляторів, двох електродвигунів, двох датчиків кутової швидкості обертання, задавача швидкості обертання електродвигунів, суматора та блока обробки інформації, один з входів якого з'єднано з виходом першого датчика кутової швидкості обертання, а вхід першого датчика кутової швидкості обертання з'єднано з виходом першого електродвигуна, вхід якого...
Пристрій для пуску потужних електромеханічних систем на базі асинхронних електродвигунів з фазним ротором
Номер патенту: 15336
Опубліковано: 30.06.1997
Автори: Лобас Віктор Григорович, Калюжний Володимир Владиславович, Сердюков Юрій Павлович
МПК: H02P 25/16, H02P 5/00
Мітки: асинхронних, ротором, потужних, пуску, пристрій, електродвигунів, електромеханічних, фазним, базі, систем
Формула / Реферат:
Устройство для пуска мощных электромеханических систем на базе асинхронных электродвигателей с фазным ротором, содержащее параметрический источник тока с неуправляемым вентильным комплектом на выходе электродвигателей, фазные роторы которых связаны со входами переменного тока соответствующих неуправляемых вентильных комплектов, выходы постоянного тока которых включены через пусковое сопротивление согласно-последовательно между собой и с...
Пристрій для вимірювання частоти обертання вала і діагностування електромеханічних систем
Номер патенту: 9733
Опубліковано: 17.10.2005
Автори: Васілевський Олександр Миколайович, Поджаренко Володимир Олександрович
МПК: G01P 15/09
Мітки: частоти, обертання, пристрій, діагностування, вимірювання, електромеханічних, систем, вала
Формула / Реферат:
Пристрій для вимірювання частоти обертання вала і діагностування електромеханічних систем, який складається із блока утворення взаємокореляційної функції та визначення часу затримки між виміряними сигналами, блока обчислення частоти обертання вала, які з'єднано між собою, який відрізняється тим, що в нього введено два п'єзоелектричних акселерометри, осі яких розміщені під прямим кутом один відносно одного, два підсилювачі заряду, два...
Попередній патент: З’єднувальні комплекти зі збільшеною затяжною здатністю
Наступний патент: Фармацевтична таблетка, яка містить 1-(b-d-глюкопіранозил)-4-метил-3-[5-(4-фторфеніл)-2-тієнілметил]бензол як інгібітор натрійзалежного переносника глюкози (нзпг)
Випадковий патент: Спосіб визначення антигенної новими вірусу грипу