Підвіска із регулюванням жорсткості та демпфірування
Номер патенту: 110476
Опубліковано: 10.10.2016
Автори: Дущенко Владислав Васильович, Маслієв Антон Олегович
Формула / Реферат
Підвіска транспортного засобу із пристроєм для регулювання жорсткості та демпфірування, що містить закріплений на маточині колеса кулак, який закріплений верхнім та нижнім важелями із пружними втулками та осями на кінцях до підресореного корпусу, пружний елемент підвіски виконано у вигляді торсіонного вала, який за допомогою шліцьових з'єднань закріплено одним кінцем до нижнього важеля, а другим кінцем до підресореного корпусу, а між верхнім важелем та корпусом встановлено амортизатор, яка відрізняється тим, що пружні втулки підвіски виконано із магнітореологічного еластомеру, при цьому зовнішню поверхню кожної втулки охоплено соленоїдом, що живиться електричним струмом, величина якого регулюється за програмою блоком керування.
Текст
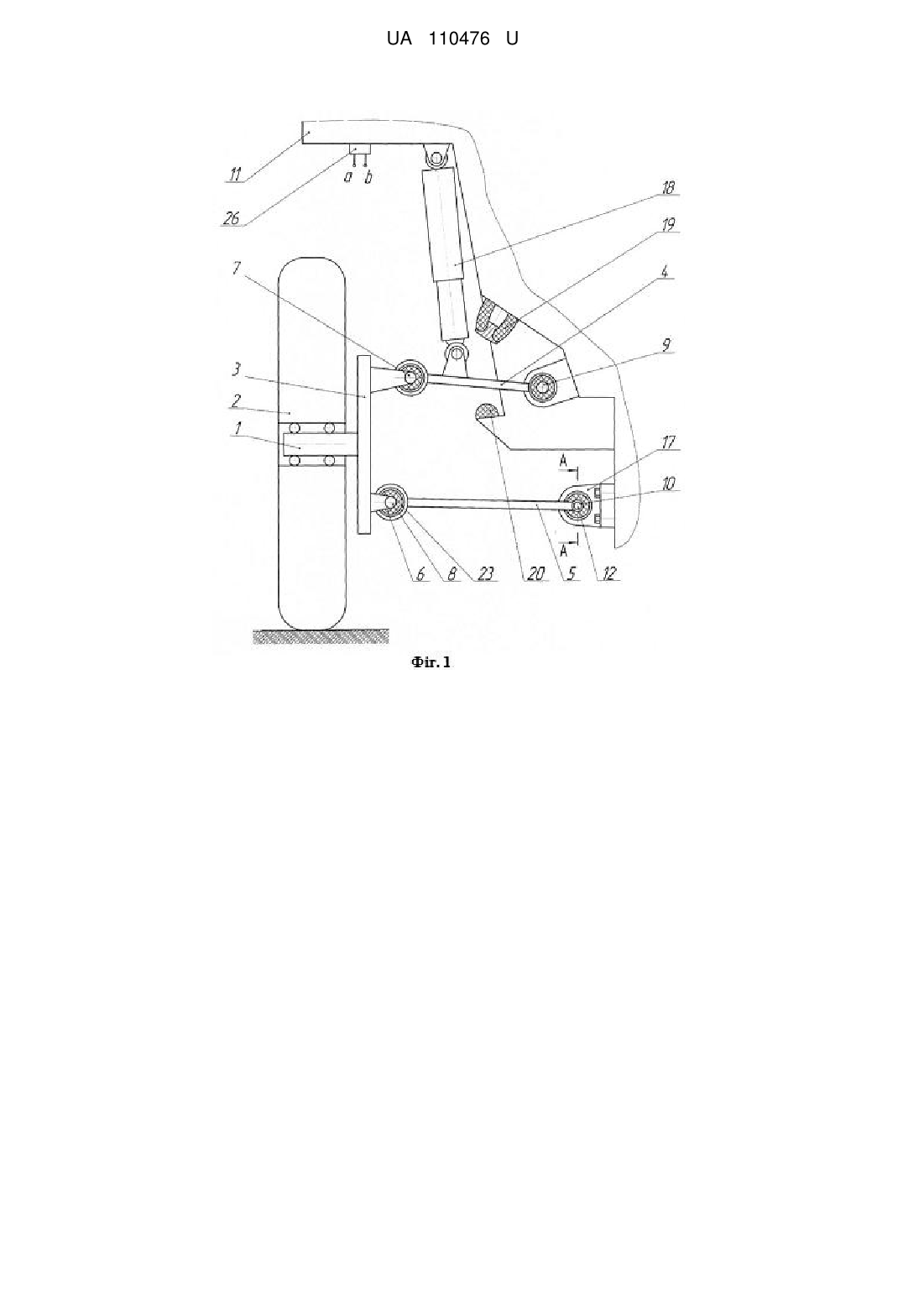
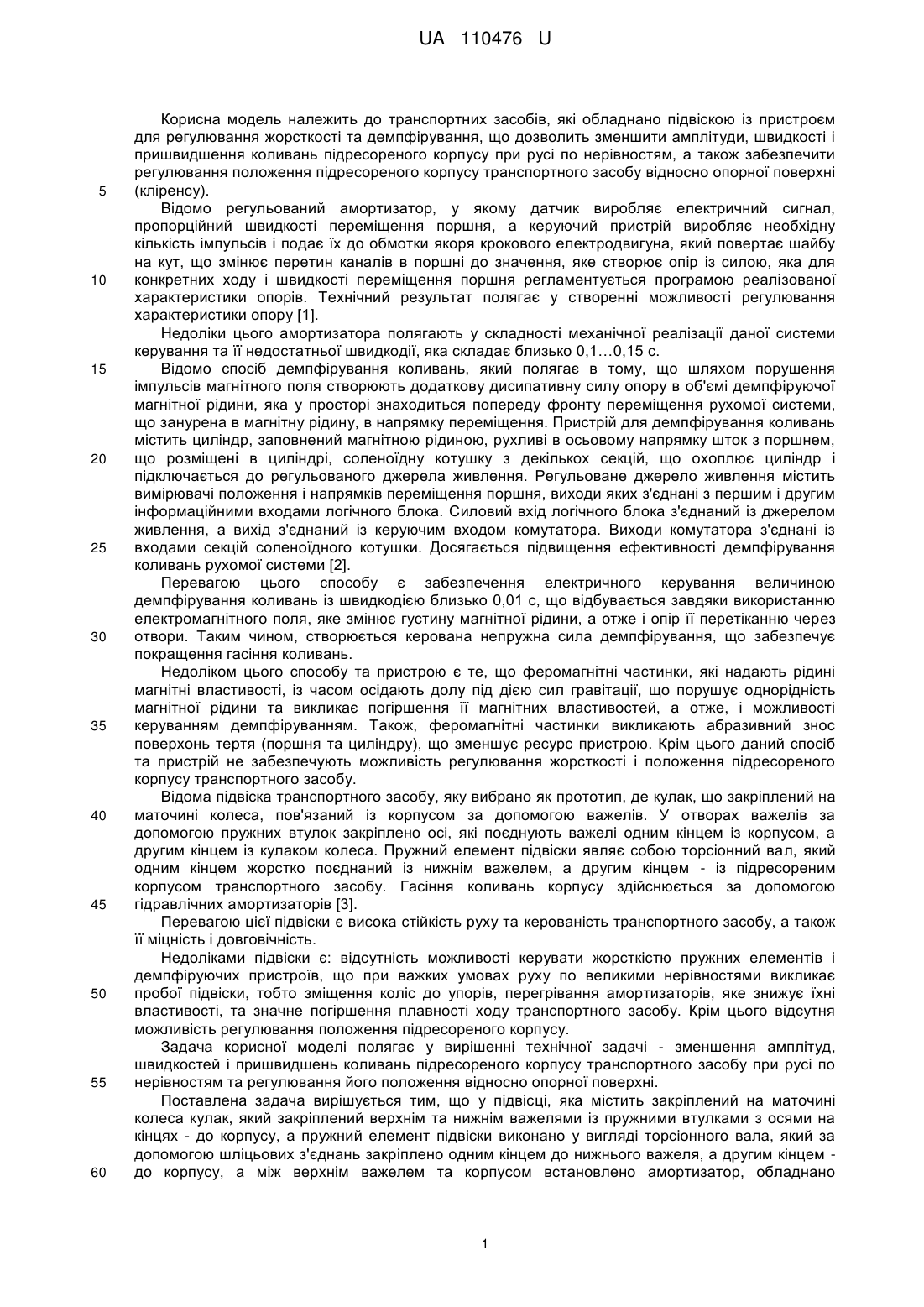
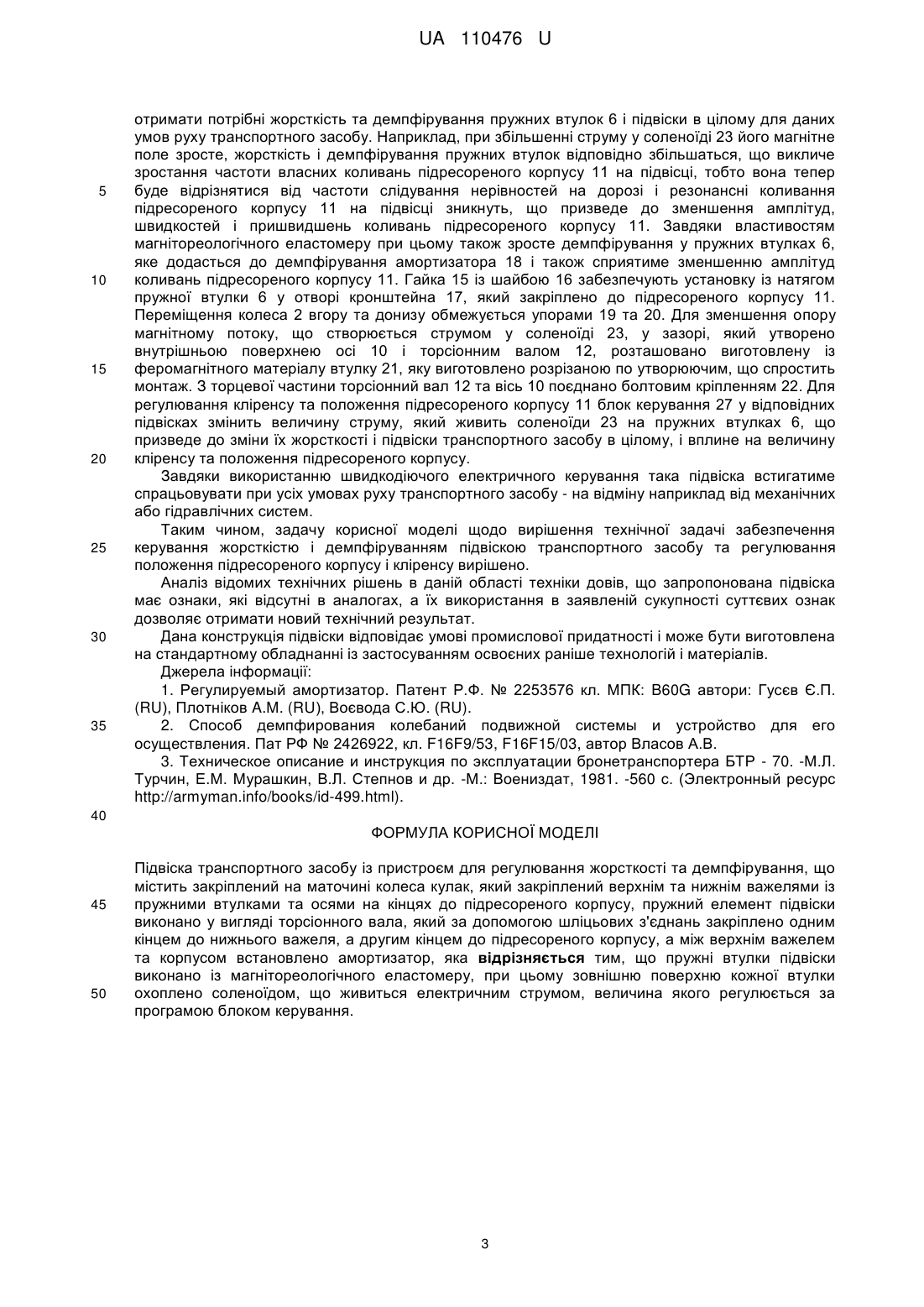
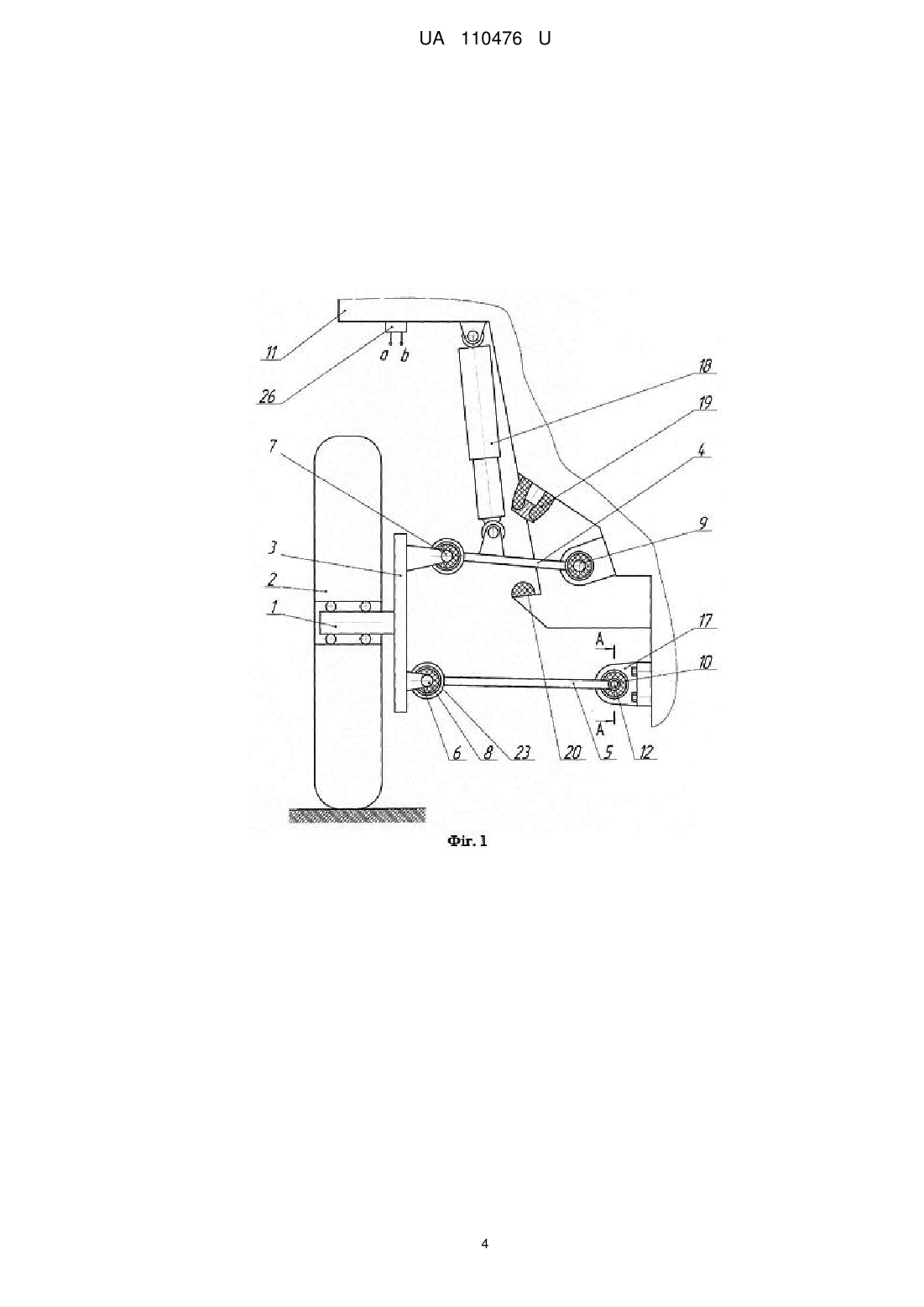
Реферат: Підвіска транспортного засобу із пристроєм для регулювання жорсткості та демпфірування містить закріплений на маточині колеса кулак, який закріплений верхнім та нижнім важелями із пружними втулками та осями на кінця до підресореного корпусу, пружний елемент підвіски виконано у вигляді торсіонного вала, який за допомогою шліцьових з'єднань закріплено одним кінцем до нижнього важеля, а другим кінцем до підресореного корпусу, а між верхнім важелем та корпусом встановлено амортизатор, причому пружні втулки підвіски виконано із магнітореологічного еластомеру, при цьому зовнішню поверхню кожної втулки охоплено соленоїдом, що живиться електричним струмом, величина якого регулюється за програмою блоком керування. UA 110476 U (54) ПІДВІСКА ІЗ РЕГУЛЮВАННЯМ ЖОРСТКОСТІ ТА ДЕМПФІРУВАННЯ UA 110476 U UA 110476 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до транспортних засобів, які обладнано підвіскою із пристроєм для регулювання жорсткості та демпфірування, що дозволить зменшити амплітуди, швидкості і пришвидшення коливань підресореного корпусу при русі по нерівностям, а також забезпечити регулювання положення підресореного корпусу транспортного засобу відносно опорної поверхні (кліренсу). Відомо регульований амортизатор, у якому датчик виробляє електричний сигнал, пропорційний швидкості переміщення поршня, а керуючий пристрій виробляє необхідну кількість імпульсів і подає їх до обмотки якоря крокового електродвигуна, який повертає шайбу на кут, що змінює перетин каналів в поршні до значення, яке створює опір із силою, яка для конкретних ходу і швидкості переміщення поршня регламентується програмою реалізованої характеристики опорів. Технічний результат полягає у створенні можливості регулювання характеристики опору [1]. Недоліки цього амортизатора полягають у складності механічної реалізації даної системи керування та її недостатньої швидкодії, яка складає близько 0,1…0,15 с. Відомо спосіб демпфірування коливань, який полягає в тому, що шляхом порушення імпульсів магнітного поля створюють додаткову дисипативну силу опору в об'ємі демпфіруючої магнітної рідини, яка у просторі знаходиться попереду фронту переміщення рухомої системи, що занурена в магнітну рідину, в напрямку переміщення. Пристрій для демпфірування коливань містить циліндр, заповнений магнітною рідиною, рухливі в осьовому напрямку шток з поршнем, що розміщені в циліндрі, соленоїдну котушку з декількох секцій, що охоплює циліндр і підключається до регульованого джерела живлення. Регульоване джерело живлення містить вимірювачі положення і напрямків переміщення поршня, виходи яких з'єднані з першим і другим інформаційними входами логічного блока. Силовий вхід логічного блока з'єднаний із джерелом живлення, а вихід з'єднаний із керуючим входом комутатора. Виходи комутатора з'єднані із входами секцій соленоїдного котушки. Досягається підвищення ефективності демпфірування коливань рухомої системи [2]. Перевагою цього способу є забезпечення електричного керування величиною демпфірування коливань із швидкодією близько 0,01 с, що відбувається завдяки використанню електромагнітного поля, яке змінює густину магнітної рідини, а отже і опір її перетіканню через отвори. Таким чином, створюється керована непружна сила демпфірування, що забезпечує покращення гасіння коливань. Недоліком цього способу та пристрою є те, що феромагнітні частинки, які надають рідині магнітні властивості, із часом осідають долу під дією сил гравітації, що порушує однорідність магнітної рідини та викликає погіршення її магнітних властивостей, а отже, і можливості керуванням демпфіруванням. Також, феромагнітні частинки викликають абразивний знос поверхонь тертя (поршня та циліндру), що зменшує ресурс пристрою. Крім цього даний спосіб та пристрій не забезпечують можливість регулювання жорсткості і положення підресореного корпусу транспортного засобу. Відома підвіска транспортного засобу, яку вибрано як прототип, де кулак, що закріплений на маточині колеса, пов'язаний із корпусом за допомогою важелів. У отворах важелів за допомогою пружних втулок закріплено осі, які поєднують важелі одним кінцем із корпусом, а другим кінцем із кулаком колеса. Пружний елемент підвіски являє собою торсіонний вал, який одним кінцем жорстко поєднаний із нижнім важелем, а другим кінцем - із підресореним корпусом транспортного засобу. Гасіння коливань корпусу здійснюється за допомогою гідравлічних амортизаторів [3]. Перевагою цієї підвіски є висока стійкість руху та керованість транспортного засобу, а також її міцність і довговічність. Недоліками підвіски є: відсутність можливості керувати жорсткістю пружних елементів і демпфіруючих пристроїв, що при важких умовах руху по великими нерівностями викликає пробої підвіски, тобто зміщення коліс до упорів, перегрівання амортизаторів, яке знижує їхні властивості, та значне погіршення плавності ходу транспортного засобу. Крім цього відсутня можливість регулювання положення підресореного корпусу. Задача корисної моделі полягає у вирішенні технічної задачі - зменшення амплітуд, швидкостей і пришвидшень коливань підресореного корпусу транспортного засобу при русі по нерівностям та регулювання його положення відносно опорної поверхні. Поставлена задача вирішується тим, що у підвісці, яка містить закріплений на маточині колеса кулак, який закріплений верхнім та нижнім важелями із пружними втулками з осями на кінцях - до корпусу, а пружний елемент підвіски виконано у вигляді торсіонного вала, який за допомогою шліцьових з'єднань закріплено одним кінцем до нижнього важеля, а другим кінцем до корпусу, а між верхнім важелем та корпусом встановлено амортизатор, обладнано 1 UA 110476 U 5 10 15 20 25 30 35 40 45 50 55 60 пристроєм для регулювання жорсткості та демпфірування, згідно з корисною моделлю, пружні втулки підвіски виконано із магнітореологічного еластомеру, при цьому зовнішню поверхню кожної втулки охоплено соленоїдом, що живиться від джерела електричним струмом, величина якого регламентується блоком керування за програмою. Застосування у підвісці пружних втулок із магнітореологічного еластомеру, модулі пружності, зсув та втрати якого можна керувати за допомогою магнітного поля, дозволяє забезпечити регулювання жорсткості та демпфірування у підвісці і вирішити поставлену технічну задачу - зменшення амплітуд, швидкостей і прискорень коливань підресореного корпусу транспортного засобу при русі по нерівностям та забезпечення регулювання його положення відносно опорної поверхні. Суть корисної моделі пояснюється кресленнями, де на Фіг. 1 - зображено схему підвіски; на Фіг. 2 - зображено переріз пружної втулки із соленоїдом; на Фіг. 3 - зображено схему підключення елементів керування. Підвіска з регулюванням жорсткості та демпфірування містить на осі 1 колеса 2, поворотний кулак 3, верхній 4 та нижній 5 важелі, які містять на кожному кінці виконані із пружного магнітореологічного еластомеру втулки 6 із осями 7, 8, 9, 10. Осі 7, 8 закріплено до поворотного кулака 3, а вісь 9 закріплено до підресореного корпусу 11. Вісь 10 нижнього важеля 5 виконано у вигляді труби, в якій за допомогою шліцьового з'єднання 13 закріплено кінець пружного елемента підвіски у вигляді торсіонного вала 12, а його другий кінець також за допомогою шліцьового з'єднання 14 закріплено до підресореного корпусу 11. Гайка 15 із шайбою 16 забезпечують установку із натягом пружної втулки 6 у отворі кронштейна 17, який закріплено до підресореного корпусу 11. Між верхнім важелем 4 та підресореним корпусом 11 встановлено амортизатор 18. Переміщення колеса вгору та донизу обмежується упорами 19 та 20. У зазорі, який утворено внутрішньою поверхнею осі 10 і торсіонним валом 12, розташовано втулку 21, що виготовлена із феромагнітного матеріалу та розрізана на частини по твірним. З торцевої частини торсіонний вал 12 та вісь 10 поєднано болтовим кріпленням 22. На зовнішній поверхні пружної втулки 6 розміщено соленоїд 23, який розташовано на каркасі 24, закріпленому болтами 25 до кронштейна 17. Блок датчиків 26 встановлено на підресореному корпусі 11. Підвіска також має блок керування 27 та джерело струму 28. Підвіска із регулюванням жорсткості та демпфірування працює наступним чином. Рух транспортного засобу по нерівностям призводить до виникнення вертикальних, поздовжньо-кутових та поперечно-кутових коливань підресореного корпусу, що негативно впливає на людей та устаткування. Для ефективного зменшення їх негативного впливу необхідно забезпечити керування жорсткістю пружних елементів і опором демпфіруючих пристроїв підвіски, відповідно до умов руху. Оскільки жорсткість підвіски визначається як сума незмінної жорсткості торсіонного вала 12 та регульованої жорсткості пружних втулок 6, то зміна струму, який надходить до соленоїдів 23, викличе зміну магнітного поля і активізує феромагнітні частинки у магнітореологічному еластомері пружних втулок 6, що призведе до зміни їх жорсткості та демпфіруючих властивостей. Зменшення амплітуд, швидкостей та пришвидшень коливань підресореного корпусу на підвісці відбувається наступним чином. Найбільш небезпечними вважаються періодичні нерівності, які викликають резонансні коливання підресореного корпусу 11 на підвісці, коли амплітуди, швидкості та пришвидшення коливань стрімко зростають. При русі транспортного засобу по періодичним нерівностям, вони примушують колесо 2 переміщуватися по вертикалі із частотою слідування нерівностей і передають зміщення через вісь 1 на кулак 3, через пружні втулки 6 на верхній 4 та нижній 5 важелі, які при цьому обертаються відносно осей 7, 8, 9, 10, і викликають кутові деформації пружних втулок 6. Обертання нижнього важеля 5 викликає також обертання жорстко поєднаної із ним осі 10, яка повертає поєднаний із нею за допомогою шліцьового з'єднання 13 торсіонний вал 12. Другий кінець торсіонного вала 12 залишається нерухомим, тому що його закріплено до підресореного корпусу 11 за допомогою шліцьового з'єднання 14. Торсіонний вал 12 за цих умов являє собою пружний елемент транспортного засобу. При цьому кутові деформації торсіонного вала 12 за величиною співпадають із кутовими деформаціями пружних втулок 6, а їх жорсткість додається до жорсткості торсіонного вала 12, що відповідно підвищує загальну жорсткість підвіски. Аналогічно, до сили демпфірування, яку створює амортизатор 18, додається сила демпфірування, яку відтворюють пружні втулки 6 при коливаннях підресореного корпусу 11 на підвісці. Соленоїд 23 живиться через клеми с, d струмом від джерела 28, причому величина струму за програмою регулюється блоком керування 27, який отримує необхідну для нього інформацію через клеми a, b від відповідних клем на блоку датчиків 26. Це дозволяє 2 UA 110476 U 5 10 15 20 25 30 35 отримати потрібні жорсткість та демпфірування пружних втулок 6 і підвіски в цілому для даних умов руху транспортного засобу. Наприклад, при збільшенні струму у соленоїді 23 його магнітне поле зросте, жорсткість і демпфірування пружних втулок відповідно збільшаться, що викличе зростання частоти власних коливань підресореного корпусу 11 на підвісці, тобто вона тепер буде відрізнятися від частоти слідування нерівностей на дорозі і резонансні коливання підресореного корпусу 11 на підвісці зникнуть, що призведе до зменшення амплітуд, швидкостей і пришвидшень коливань підресореного корпусу 11. Завдяки властивостям магнітореологічного еластомеру при цьому також зросте демпфірування у пружних втулках 6, яке додасться до демпфірування амортизатора 18 і також сприятиме зменшенню амплітуд коливань підресореного корпусу 11. Гайка 15 із шайбою 16 забезпечують установку із натягом пружної втулки 6 у отворі кронштейна 17, який закріплено до підресореного корпусу 11. Переміщення колеса 2 вгору та донизу обмежується упорами 19 та 20. Для зменшення опору магнітному потоку, що створюється струмом у соленоїді 23, у зазорі, який утворено внутрішньою поверхнею осі 10 і торсіонним валом 12, розташовано виготовлену із феромагнітного матеріалу втулку 21, яку виготовлено розрізаною по утворюючим, що спростить монтаж. З торцевої частини торсіонний вал 12 та вісь 10 поєднано болтовим кріпленням 22. Для регулювання кліренсу та положення підресореного корпусу 11 блок керування 27 у відповідних підвісках змінить величину струму, який живить соленоїди 23 на пружних втулках 6, що призведе до зміни їх жорсткості і підвіски транспортного засобу в цілому, і вплине на величину кліренсу та положення підресореного корпусу. Завдяки використанню швидкодіючого електричного керування така підвіска встигатиме спрацьовувати при усіх умовах руху транспортного засобу - на відміну наприклад від механічних або гідравлічних систем. Таким чином, задачу корисної моделі щодо вирішення технічної задачі забезпечення керування жорсткістю і демпфіруванням підвіскою транспортного засобу та регулювання положення підресореного корпусу і кліренсу вирішено. Аналіз відомих технічних рішень в даній області техніки довів, що запропонована підвіска має ознаки, які відсутні в аналогах, а їх використання в заявленій сукупності суттєвих ознак дозволяє отримати новий технічний результат. Дана конструкція підвіски відповідає умові промислової придатності і може бути виготовлена на стандартному обладнанні із застосуванням освоєних раніше технологій і матеріалів. Джерела інформації: 1. Регулируемый амортизатор. Патент Р.Ф. № 2253576 кл. МПК: B60G автори: Гусєв Є.П. (RU), Плотніков A.M. (RU), Воєвода С.Ю. (RU). 2. Способ демпфирования колебаний подвижной системы и устройство для его осуществления. Пат РФ № 2426922, кл. F16F9/53, F16F15/03, автор Власов А.В. 3. Техническое описание и инструкция по эксплуатации бронетранспортера БТР - 70. -М.Л. Турчин, Ε.Μ. Мурашкин, В.Л. Степнов и др. -М.: Воениздат, 1981. -560 с. (Электронный ресурс http://armyman.info/books/id-499.html). 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Підвіска транспортного засобу із пристроєм для регулювання жорсткості та демпфірування, що містить закріплений на маточині колеса кулак, який закріплений верхнім та нижнім важелями із пружними втулками та осями на кінцях до підресореного корпусу, пружний елемент підвіски виконано у вигляді торсіонного вала, який за допомогою шліцьових з'єднань закріплено одним кінцем до нижнього важеля, а другим кінцем до підресореного корпусу, а між верхнім важелем та корпусом встановлено амортизатор, яка відрізняється тим, що пружні втулки підвіски виконано із магнітореологічного еластомеру, при цьому зовнішню поверхню кожної втулки охоплено соленоїдом, що живиться електричним струмом, величина якого регулюється за програмою блоком керування. 3 UA 110476 U 4 UA 110476 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B60G 17/08, B60G 17/015
Мітки: жорсткості, регулюванням, демпфірування, підвіска
Код посилання
<a href="https://ua.patents.su/7-110476-pidviska-iz-regulyuvannyam-zhorstkosti-ta-dempfiruvannya.html" target="_blank" rel="follow" title="База патентів України">Підвіска із регулюванням жорсткості та демпфірування</a>
Система для модифікування властивостей жорсткості / демпфірування стикових з’єднань
Номер патенту: 61950
Опубліковано: 15.12.2003
Автори: Кабрера Ревуельта Енріке, Ланчо Донсел Мігуель, Сеспедоса Кастан Фернандо
МПК: B64G 1/64, F16F 7/00, F16F 3/00
Мітки: демпфірування, система, стикових, модифікування, з'єднань, властивостей, жорсткості
Формула / Реферат:
1. Система для модифікування властивостей жорсткості/демпфірування стикових з'єднань, яка відрізняється тим, що вона містить принаймні проміжну з'єднувальну конструкцію, призначену для прийому з обох своїх сторін двох конструкцій, що підлягають зчленуванню, перше і друге рознімне блокувальне пристосування, призначене для фіксації в обопільному взаємозв'язку зчленування першої з вказаних конструкцій з першою частиною вказаної проміжної...
Підвіска колеса транспортного засобу
Номер патенту: 71174
Опубліковано: 10.07.2012
Автори: Данченков Яків Васильович, Ніколайчук Валерій Васильович, Малащенко Володимир Олександрович, Ніколайчук Василь Михайлович
МПК: B60G 11/00
Мітки: транспортного, підвіска, колеса, засобу
Формула / Реферат:
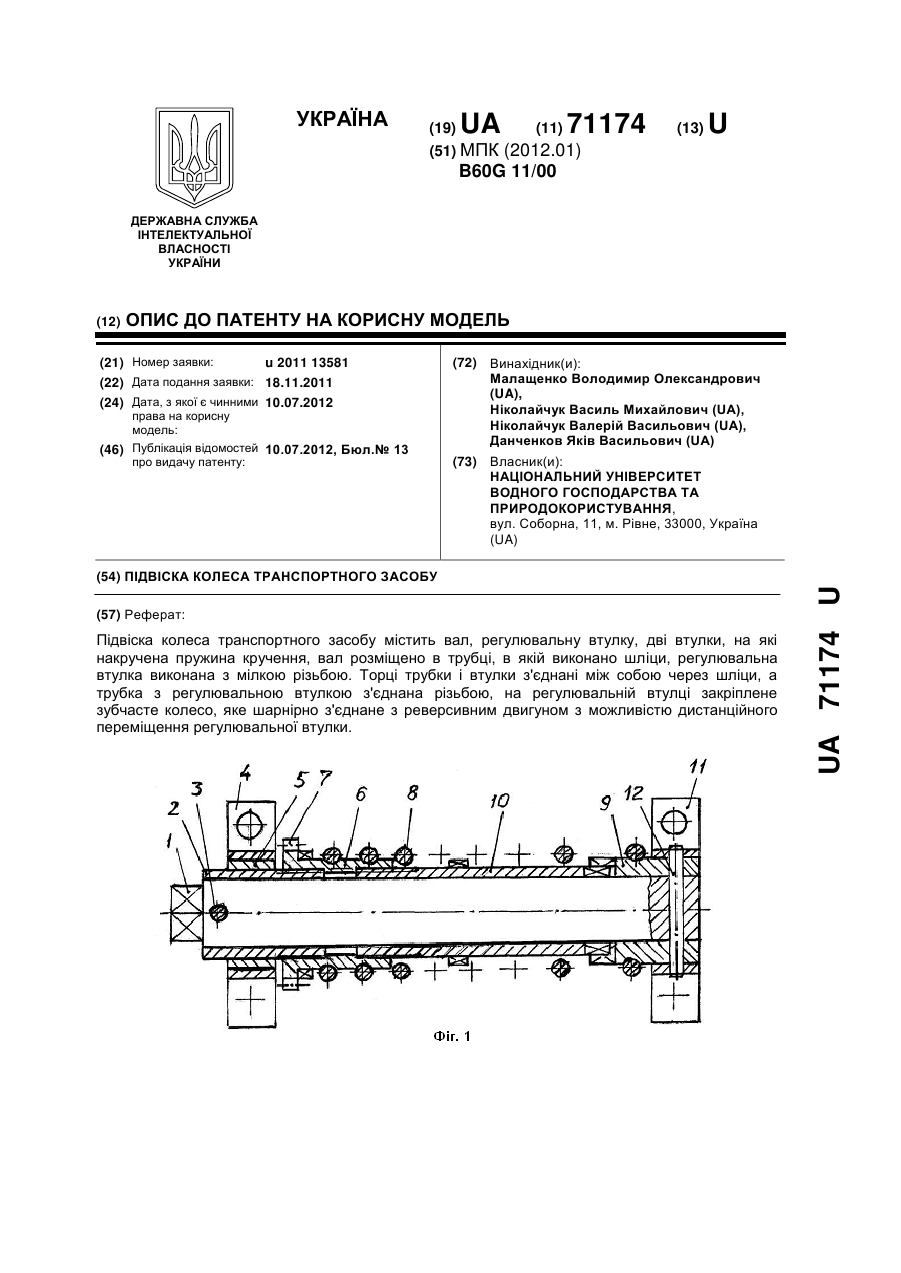
Підвіска колеса транспортного засобу, що містить вал, регулювальну втулку, дві втулки, на які накручена пружина кручення, вал розміщено в трубці, в якій виконано шліци, регулювальна втулка виконана з мілкою різьбою, яка відрізняється тим, що торці трубки і втулки з'єднані між собою через шліци, а трубка з регулювальною втулкою з'єднана різьбою, на регулювальній втулці закріплене зубчасте колесо, яке шарнірно з'єднане з реверсивним двигуном з...
Підвіска колеса транспортного засобу
Номер патенту: 64562
Опубліковано: 10.11.2011
Автори: Малащенко Володимир Олександрович, Ніколайчук Валерій Васильович, Ніколайчук Василь Михайлович
МПК: B60G 11/00
Мітки: підвіска, транспортного, колеса, засобу
Формула / Реферат:
Підвіска колеса транспортного засобу, що містить дві концентрично розміщені пружини, шарнірно з'єднані через фланці з одного боку з колесом, а з іншого - з рамою, яка відрізняється тим, що в нижній частині підвіски розташовано регулювальний пристрій, який складається з корпусу, шайби та гайки, з можливістю попереднього стискання допоміжної пружини, або установки зазору перед верхнім фланцем.
Підвіска колеса транспортного засобу
Номер патенту: 4884
Опубліковано: 15.02.2005
Автори: Марчук Микола Михайлович, Ніколайчук Василь Михайлович, Ніколайчук Валерій Васильович
МПК: B60G 11/32
Мітки: транспортного, колеса, підвіска, засобу
Формула / Реферат:
1. Підвіска колеса транспортного засобу, що містить торсіонний пружний елемент, одним кінцем приєднаний за допомогою профільного з'єднання до розрізної втулки, іншим кінцем жорстко з'єднаний з другою розрізною втулкою, на втулки накручено пружину кручення з правим навиванням і насаджена пружина кручення з лівим навиванням, на яку накручені дві з'єднувальні втулки, яка відрізняється тим, що на торцях розрізних втулок виконані шліци.2....
Підвіска гусеничного транспортного засобу
Номер патенту: 18397
Опубліковано: 15.11.2006
Автори: Медведєв Микола Григорович, Абляскін Олег Ібрагімович, Єпіфанов Віталій Валерійович, Воронцов Сергій Миколайович
МПК: F16F 5/00
Мітки: підвіска, засобу, транспортного, гусеничного
Формула / Реферат:
Підвіска гусеничного транспортного засобу, яка містить опорний каток, розташований на малій осі балансира, велика вісь якого встановлена з можливістю повороту відносно корпусу транспортного засобу, та торсіонний вал, один з кінців якого закріплений в корпусі, яка відрізняється тим, що на вільному кінці торсіонного вала співвісно розміщена ведена шестірня передачі з некруглими зубчастими колесами, ведуча шестірня якої співвісно розміщена на...
Попередній патент: Спосіб виготовлення заготовок лопаток компресору із залізонікелевих сплавів
Наступний патент: Топковий модуль спалювання палива та сушіння матеріалів
Випадковий патент: Вакуумний вимикач