Спосіб векторного керування тяговим асинхронним двигуном з урахуванням насичення та обмеження моменту на низьких обертах
Номер патенту: 113687
Опубліковано: 10.02.2017
Автори: Слободенюк Юлія Олександрівна, Смирнова Тамара Олександрівна, Бялобржеський Олексій Володимирович

Формула / Реферат
Спосіб векторного керування тяговим асинхронним двигуном з урахуванням насичення та обмеження моменту на низьких обертах, в якому задають керуючий сигнал швидкості та порівнюють з сигналом обчислення швидкості по збільшенню кута, виконують обчислення q-складової струму статора, порівнюють із компенсаційною складовою каналу управління, формують з сигналу помилки по струму сигнал завдання напруги по осі q, порівнюють із компенсаційною складовою каналу управління, виконують обчислення d-складової струму статора, використовуючи потік намагнічування в залежності від моменту, при заданому ![]() , порівнюють із компенсаційною складовою каналу управління, формують з сигналу помилки по струму сигнал завдання напруги по осі d, порівнюють із компенсаційною складовою каналу управління, порівнюють із компенсаційною складовою каналу управління, здійснюють перетворення вектора напруги статора з обертової системи
, порівнюють із компенсаційною складовою каналу управління, формують з сигналу помилки по струму сигнал завдання напруги по осі d, порівнюють із компенсаційною складовою каналу управління, порівнюють із компенсаційною складовою каналу управління, здійснюють перетворення вектора напруги статора з обертової системи ![]() в нерухому двофазну, а потім в полярну систему координат, здійснюють високочастотну фільтрацію та перетворення струму статора від трифазної нерухомої системи координат в двофазну, а потім у обертову систему
в нерухому двофазну, а потім в полярну систему координат, здійснюють високочастотну фільтрацію та перетворення струму статора від трифазної нерухомої системи координат в двофазну, а потім у обертову систему ![]() , здійснюють реалізацію вектора напруги статора, керують процесом інвертування напруги джерела постійного струму та формування струму статора асинхронної машини, який відрізняється тим, що формують з сигналу помилки по швидкості сигнал завдання моменту, обмежують момент в залежності від частоти, обчислюють значення швидкості та гранично допустимий струм, визначають максимальний момент, який двигун здатний забезпечити, перевантажувальний момент, формують перевантажувальний момент та частоту, нижче якої починається обмеження моменту на рівні перевантажувального, задають потік ротора при роботі з постійним потоком, або оптимізації потоку ротора в залежності від моменту, виконують обчислення частоти ковзання, здійснюють обчислення поточного кута повороту потоку ротора, обмежують частоти нижче номінальної для зростання граничного моменту.
, здійснюють реалізацію вектора напруги статора, керують процесом інвертування напруги джерела постійного струму та формування струму статора асинхронної машини, який відрізняється тим, що формують з сигналу помилки по швидкості сигнал завдання моменту, обмежують момент в залежності від частоти, обчислюють значення швидкості та гранично допустимий струм, визначають максимальний момент, який двигун здатний забезпечити, перевантажувальний момент, формують перевантажувальний момент та частоту, нижче якої починається обмеження моменту на рівні перевантажувального, задають потік ротора при роботі з постійним потоком, або оптимізації потоку ротора в залежності від моменту, виконують обчислення частоти ковзання, здійснюють обчислення поточного кута повороту потоку ротора, обмежують частоти нижче номінальної для зростання граничного моменту.
Текст
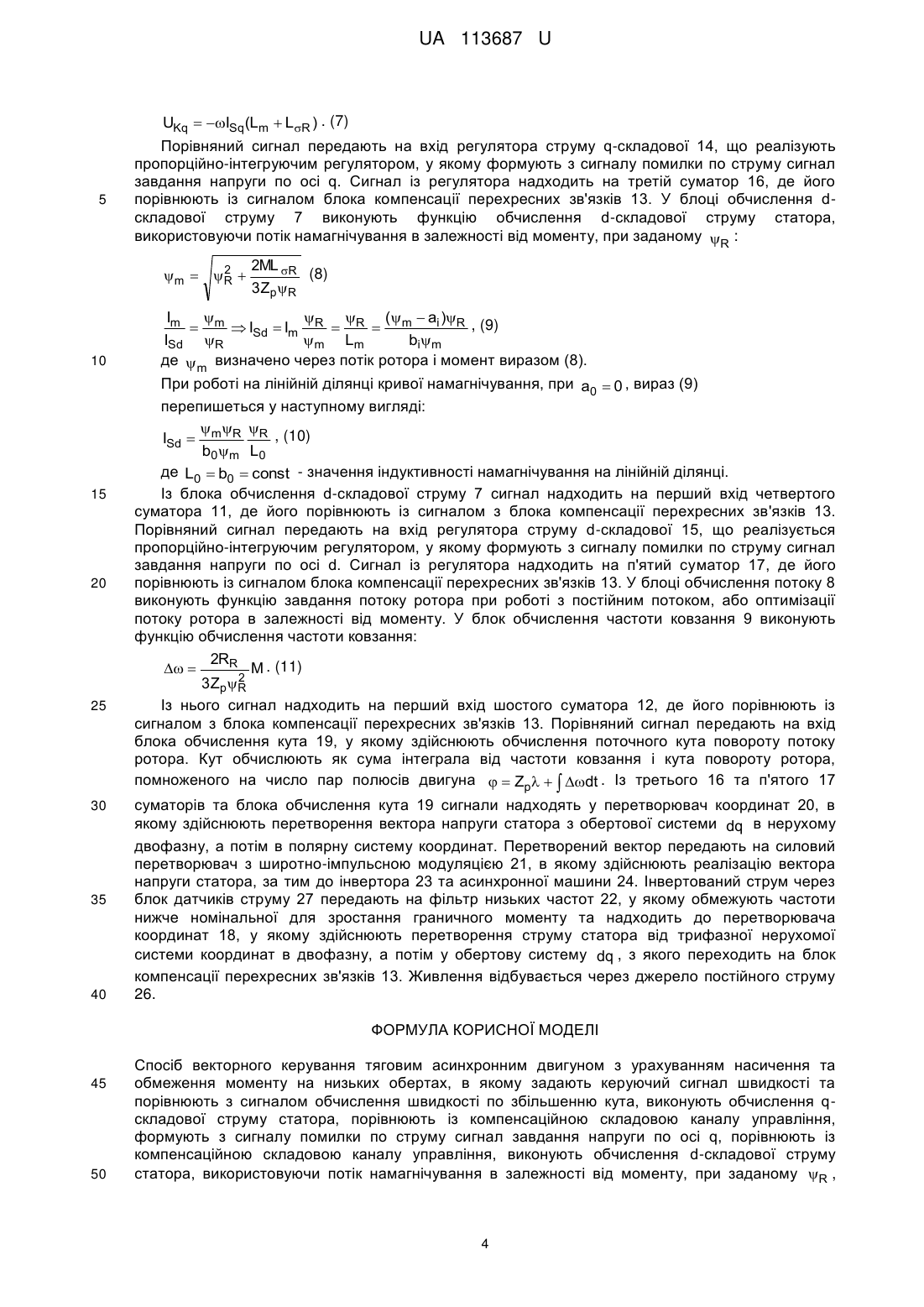
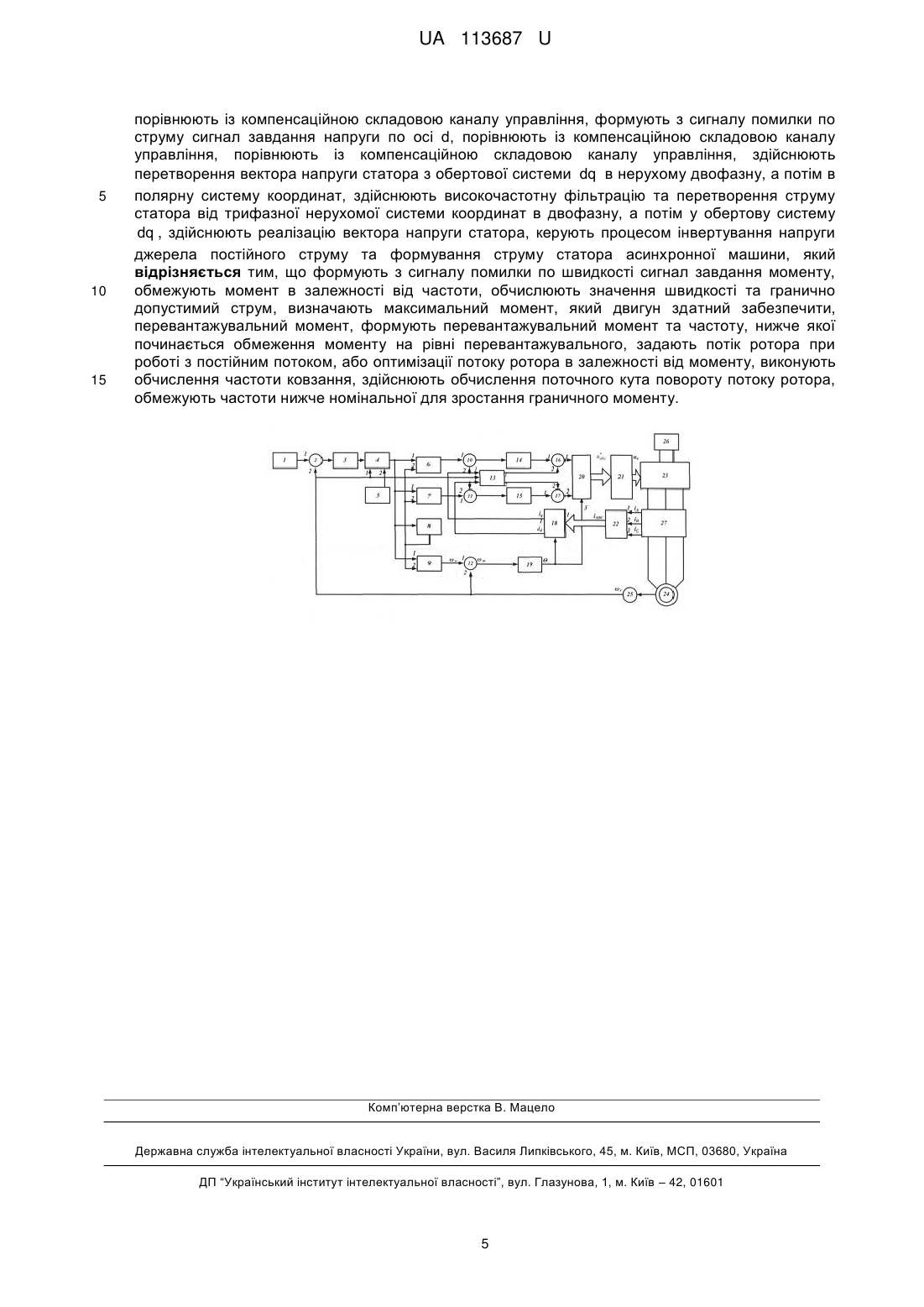
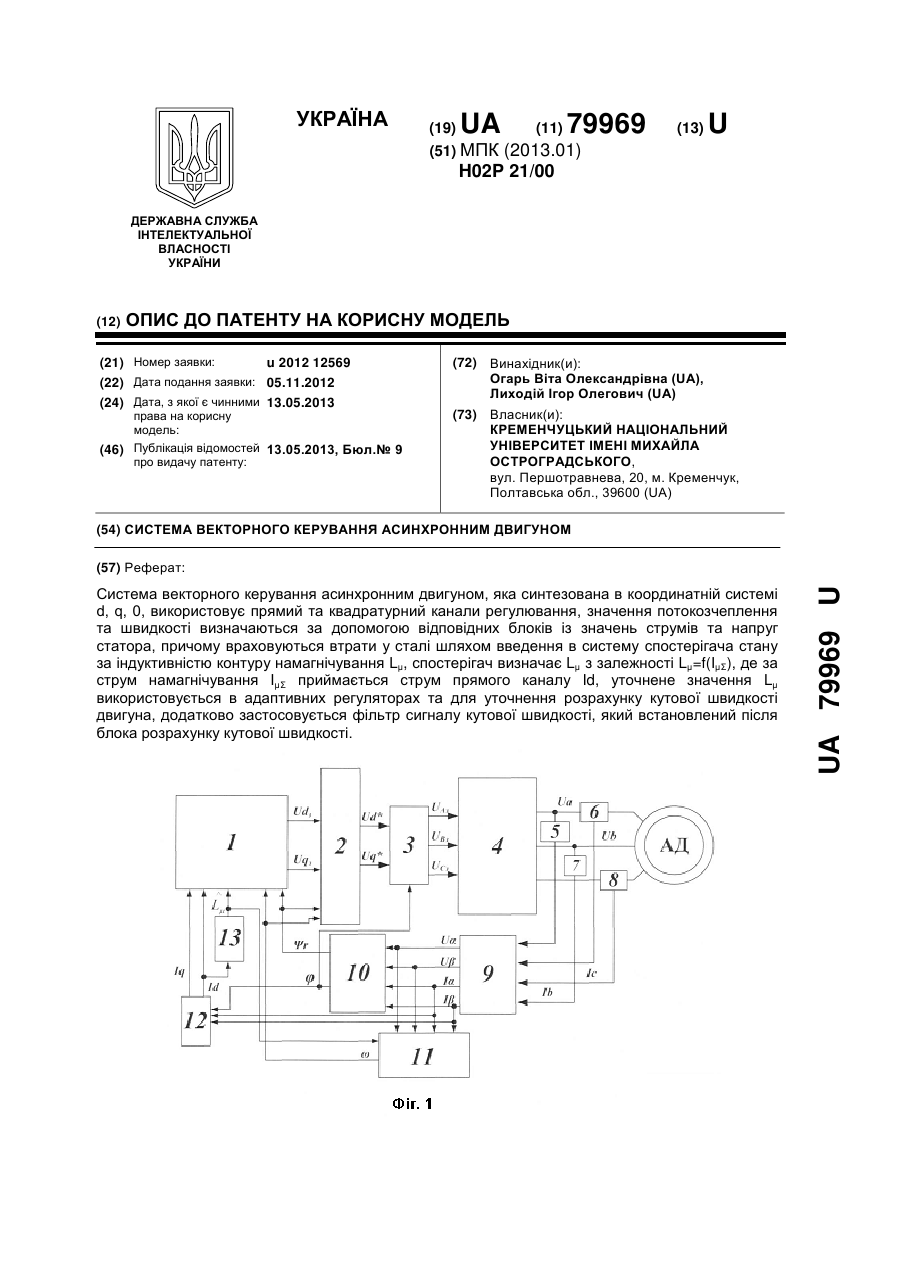
Реферат: Спосіб векторного керування тяговим асинхронним двигуном з урахуванням насичення та обмеження моменту на низьких обертах, в якому задають керуючий сигнал швидкості та порівнюють з сигналом обчислення швидкості по збільшенню кута, виконують обчислення qскладової струму статора, порівнюють із компенсаційною складовою каналу управління, формують з сигналу помилки по струму сигнал завдання напруги по осі q, порівнюють із компенсаційною складовою каналу управління, виконують обчислення d-складової струму статора, використовуючи потік намагнічування в залежності від моменту, при заданому R , порівнюють із компенсаційною складовою каналу управління, формують з сигналу помилки по струму сигнал завдання напруги по осі d, порівнюють із компенсаційною складовою каналу управління, порівнюють із компенсаційною складовою каналу управління, здійснюють перетворення вектора напруги статора з обертової системи dq в нерухому двофазну, а потім в полярну систему координат, здійснюють високочастотну фільтрацію та перетворення струму статора від трифазної нерухомої системи координат в двофазну, а потім у обертову систему dq , здійснюють реалізацію вектора напруги статора, керують процесом інвертування напруги джерела постійного струму та формування струму статора асинхронної машини, причому формують з сигналу помилки по швидкості сигнал завдання моменту, обмежують момент в залежності від частоти, обчислюють значення швидкості та гранично допустимий струм, визначають максимальний момент, який двигун здатний забезпечити, перевантажувальний момент, формують перевантажувальний момент та частоту, нижче якої починається обмеження моменту на рівні перевантажувального, задають потік ротора при роботі з постійним потоком, або оптимізації потоку ротора в залежності від моменту, виконують обчислення частоти ковзання, здійснюють обчислення поточного кута повороту потоку ротора, обмежують частоти нижче номінальної для зростання граничного моменту. UA 113687 U (12) UA 113687 U UA 113687 U 5 10 Корисна модель належить до галузі електротехніки і може бути використана в промисловості та на електрифікованих залізницях для векторного керування електродвигуном змінного струму з автономним інвертором для забезпечення динамічних режимів руху та регенеративного гальмування з урахуванням ланцюга насичення та намагнічування. Відомий спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна [Патент № 48510, UA, H02K 15/00 "Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна"/ Гончарова Л. М, Опубл. 25.03.2010 Бюл. № 6], що включає реєстрацію реально діючих сигналів у режимах робочого функціонування асинхронного двигуна й наступну обробку зареєстрованих сигналів як реально діючих в асинхронному двигуні сигналів використовують поточні значення фазних струмів, при цьому ідентифікатор положення вектора потокозчеплення ротора знаходять через значення пропорційних складовим вектора потокозчеплення ротора змінних ' ' і формулах: 15 ' i Iq3 i / Id3 , ' i Iq3 i / Id3 , де Id3 - задане значення, намагнічуючої складових струмів статора, Iq3 - задане значення 20 активної складової струму статора, i - проекція узагальненого вектора струму на вісь , i проекція узагальненого вектора струму на вісь , потім обчислюють кут β між вектором потокозчеплення й віссю нерухливої системи координат по формулі: ' arctan ' , а намагнічуючу складову статорного струму й активну складову статорного струму обчислюють за формулами: Id 25 30 35 40 Iq i ' '2 ' 2 ' i '2 ' 2 0,5 0,5 ' i '2 ' 2 i ' '2 ' 2 ; . 0,5 0,5 Суттєві ознаки, що збігаються з корисною моделлю, що заявляється: асинхронний двигун, перетворювач, датчики струму, що з'єднують силовий перетворювач та асинхронний двигун, перетворювач координат стуму, використання регуляторів швидкості, активної та намагнічуючої складової струму. Недоліками даного технічного рішення є: відсутність обмежувачів сигналів завдання активної та намагнічуючої складових струму, що може призвести до підвищення струму в статорному колі та перегріву машини, відсутні блоки, які забезпечують урахування насичення магнітної системи. Відоме технічне рішення системи векторного керування асинхронним двигуном [Патент №79969, UA, H02P 21/00 "Система векторного керування асинхронним двигуном"/ Огарь В. О., Лиходій І. О., Опубл. 13.05.2013 Бюл.№9], яка синтезована в координатній системі d, q, 0, використовує прямий та квадратурний канали регулювання, значення потокозчеплення та швидкості визначаються за допомогою відповідних блоків із значень струмів та напруг статора та враховує втрати у сталі шляхом введення в систему спостерігача стану за індуктивністю контуру намагнічування L , спостерігач визначає L з залежності L f (I ) , де за струм намагнічування 45 I приймається струм прямого каналу Id, уточнене значення L використовується в адаптивних регуляторах та для уточнення розрахунку кутової швидкості двигуна, додатково застосовується фільтр сигналу кутової швидкості, який встановлений після блока розрахунку кутової швидкості. Суттєві ознаки, що збігаються з корисною моделлю, що заявляється: модель синтезована в обертовій координатній системі d, q, 0; асинхронний двигун, перетворювач, датчики струму, що з'єднують силовий перетворювач та асинхронний двигун, перетворювач координат стуму, використання прямого та квадратурного каналу регулювання, що підтримує постійність вектора 1 UA 113687 U 5 10 15 20 25 30 35 40 45 50 55 потокозчеплення ротора та кутової швидкості двигуна, використання регуляторів швидкості, активної та намагнічуючої складової струму. Недоліками даного технічного рішення є: зміна параметрів регуляторів при зміні індуктивності намагнічування, відсутність обмежувачів сигналів завдання активної та намагнічуючої складових струму, що може призвести до підвищення струму в статорному колі та перегріву машини. Відомий спосіб урахування насичення асинхронного двигуна в системі векторного керування [Патент № 80682, UA, H02P 21/00 "Спосіб урахування насичення асинхронного двигуна в системі векторного керування"/ РодькінД. Й., Огарь В. О., Свистун А. В., Опубл. 10.06.2013 Бюл.№ 11], який полягає у врахуванні нелінійності кривої намагнічування в системі векторного керування трифазним асинхронним електродвигуном із перетворювачем частоти як джерелом живлення, в якому сигнали з блоків датчиків струму та напруги, що вимірюють миттєві значення струму та напруги, датчика швидкості асинхронного двигуна надходять на вхід блоків перетворювачів координат, на вхід блоків пропорційно-інтегральних регуляторів потокозчеплення, активного і реактивного струмів, пропорційного регулятора швидкості, блока компенсації перехресних зв'язків, блоків завдання швидкості і потокозчеплення, блоків перетворення координат, які в складі векторної системи керування здійснюють керування з орієнтацією за модулем головного потокозчеплення, на вхід блока, що виконує функцію компенсації насичення, надходять значення паспортних даних і сигнали з об'єкта керування (насиченого двигуна), з яких сигнали, що коректують значення параметра для регуляторів прямого та квадратурного струмів, частоти обертання двигуна, потокозчеплення, через зворотний зв'язок надходять на свої відповідні суматори і на керуючий вхід перетворювального пристрою живлення двигуна. Суттєві ознаки, що збігаються з корисною моделлю, що заявляється: врахування нелінійності кривої намагнічування в системі векторного керування трифазним асинхронним електродвигуном із перетворювачем частоти як джерелом живлення, сигнали з блоків датчиків струму та напруги, що вимірюють миттєві значення струму та напруги, датчика швидкості асинхронного двигуна надходять на вхід блоків перетворювачів координат, на вхід блоків пропорційно-інтегральних регуляторів потокозчеплення, активного і реактивного струмів, пропорційного регулятора швидкості, блока компенсації перехресних зв'язків, блоків задання швидкості і потокозчеплення, блоків перетворення координат, які в складі векторної системи керування здійснюють керування з орієнтацією за модулем головного потокозчеплення, на вхід блока, що виконує функцію компенсації насичення, надходять значення паспортних даних і сигнали з об'єкта керування (насиченого двигуна), з яких сигнали, що коректують значення параметра для регуляторів прямого та квадратурного струмів, частоти обертання двигуна, потокозчеплення, через зворотний зв'язок надходять на свої відповідні суматори і на керуючий вхід перетворювального пристрою живлення двигуна. Недоліками даного технічного рішення є: необхідність датчиків потокозчеплення, відсутність блока обмеження моменту, що унеможливлює формування механічної характеристики на малих швидкостях обертання. Зазначений спосіб за переліком суттєвих ознак приймається як прототип. В основу корисної моделі поставлена задача векторного керування тяговим асинхронним двигуном з формуванням тягової характеристики, шляхом врахування насичення магнітної системи асинхронного двигуна та обмеження моменту на низьких обертах забезпечити обмеження струму статора та зниження теплового навантаження двигуна. Поставлена задача вирішується тим, що в способі векторного керування тяговим асинхронним двигуном з урахуванням насичення та обмеження моменту на низьких обертах задають керуючий сигнал швидкості та порівнюють з сигналом обчислення швидкості по збільшенню кута, виконують обчислення q-складової струму статора, порівнюють із компенсаційною складовою каналу управління, формують з сигналу помилки по струму сигнал завдання напруги по осі q, порівнюють із компенсаційною складовою каналу управління, виконують обчислення d-складової струму статора, використовуючи потік намагнічування в залежності від моменту, при заданому R , порівнюють із компенсаційною складовою каналу управління, формують з сигналу помилки по струму сигнал завдання напруги по осі d, порівнюють із компенсаційною складовою каналу управління, порівнюють із компенсаційною складовою каналу управління, здійснюють перетворення вектора напруги статора з обертової системи dq в нерухому двофазну, а потім в полярну систему координат, здійснюють високочастотну фільтрацію та перетворення струму статора від трифазної нерухомої системи координат в двофазну, а потім у обертову систему dq , здійснюють реалізацію вектора напруги 2 UA 113687 U 5 10 15 20 25 30 35 статора, керують процесом інвертування напруги джерела постійного струму та формування струму статора асинхронної машини, формують з сигналу помилки по швидкості сигнал завдання моменту, обмежують момент в залежності від частоти, обчислюють значення швидкості та гранично допустимий струм, визначають максимальний момент, який двигун здатний забезпечити, перевантажувальний момент, формують перевантажувальний момент та частоту, нижче якої починається обмеження моменту на рівні перевантажувального, задають потік ротора при роботі з постійним потоком, або оптимізації потоку ротора в залежності від моменту, виконують обчислення частоти ковзання, здійснюють обчислення поточного кута повороту потоку ротора, обмежують частоти нижче номінальної для зростання граничного моменту. Корисна модель пояснюється кресленнями, де на кресленні наведена структурна схема системи регулювання з непрямою орієнтацією по полю, на якій прийняті наступні позначення: 1 - блок завдання швидкості; 2 - перший суматор; 3 - регулятор швидкості; 4 - блок обмеження моменту; 5 - силовий перетворювач; 6 - блок обчислення q-складової струму; 7 - блок обчислення d - складової струму; 8 - блок обчислення потоку; 9 - блок обчислення частоти ковзання; 10 - другий суматор; 11 - четвертий суматор; 12 - шостий суматор; 13 - блок компенсації перехресних зв'язків; 14 - регулятор струму q - складової; 15 - регулятор струму d складової; 16 - третій суматор; 17 - п'ятий суматор; 18 - перший перетворювач координат; 19 блок обчислення кута; 20 - другий перетворювач координат; 21 - силовий перетворювач з широтно-імпульсною модуляцією; 22 - фільтр низьких частот; 23 - інвертор; 24 - асинхронна машина; 25 - блок обчислення швидкості; 26 - джерело живлення постійної напруги; 27 - блок датчиків струму. У блоці завдання швидкості 1 задають керуючий сигнал та передають на перший вхід першого суматора 2, де порівнюють з сигналом блока обчислення швидкості 25, в якому здійснюють обчислення швидкості по збільшенню кута. Потім сигнал надходить на регулятор швидкості 3, який реалізують пропорційно-інтегруючим регулятором, за допомогою якого формують з сигналу помилки по швидкості сигнал завдання моменту. На блок обмеження моменту 4, в якому обмежують момент в залежності від частоти, обчислюють значення швидкості та гранично допустимий струм силового перетворювача 5. В блоці обмеження моменту 4 визначають максимальний момент, який двигун здатний забезпечити: MMAX MНОМ НОМ , (1) де: MНОМ - номінальний момент двигуна; НОМ - номінальна швидкість двигуна. Перевантажувальний момент: MПЕР 2 3ZpRISq 2(LRISd R ) Враховуючи формулу 2 2 2 3ZpR ISLIM ISd 2(LRISd R ) . (2) 2 3ZpISqR 3 2M ZpIRR ISq (LRISd R ) . (3) 2 2 2(LRISd R ) 3ZpR В результаті на виході блока обмеження моменту 4 формують перевантажувальний момент: M MПЕР1 40 45 2 2 3ZpR ISLIML2 R 0 (4) 2(LR L2 ) 0 та частота, нижче якої починається обмеження моменту на рівні перевантажувального: M ПЕР НОМ НОМ . (5) MПЕР Блок обчислення q-складової струму 6 виконує функцію обчислення q-складової струму статора, використовуючи формулу (3), із якого сигнал надходить на перший вхід другого суматора 10 та порівнюють із сигналом з блока компенсації перехресний зв'язків 13, в якому обчислюють компенсаційну складову каналу управління ISd L L UKd ISq LS m R (6) Lm LR та компенсаційну складову каналу управління ISq 3 UA 113687 U 5 UKq ISq(Lm LR ) . (7) Порівняний сигнал передають на вхід регулятора струму q-складової 14, що реалізують пропорційно-інтегруючим регулятором, у якому формують з сигналу помилки по струму сигнал завдання напруги по осі q. Сигнал із регулятора надходить на третій суматор 16, де його порівнюють із сигналом блока компенсації перехресних зв'язків 13. У блоці обчислення dскладової струму 7 виконують функцію обчислення d-складової струму статора, використовуючи потік намагнічування в залежності від моменту, при заданому R : 2 m R 10 15 20 25 30 35 40 2ML R (8) 3 Zp R Im m ( ai )R , (9) ISd Im R R m ISd R m Lm bim де m визначено через потік ротора і момент виразом (8). При роботі на лінійній ділянці кривої намагнічування, при a0 0 , вираз (9) перепишеться у наступному вигляді: ISd m R R , (10) b0m L0 де L0 b0 const - значення індуктивності намагнічування на лінійній ділянці. Із блока обчислення d-складової струму 7 сигнал надходить на перший вхід четвертого суматора 11, де його порівнюють із сигналом з блока компенсації перехресних зв'язків 13. Порівняний сигнал передають на вхід регулятора струму d-складової 15, що реалізується пропорційно-інтегруючим регулятором, у якому формують з сигналу помилки по струму сигнал завдання напруги по осі d. Сигнал із регулятора надходить на п'ятий суматор 17, де його порівнюють із сигналом блока компенсації перехресних зв'язків 13. У блоці обчислення потоку 8 виконують функцію завдання потоку ротора при роботі з постійним потоком, або оптимізації потоку ротора в залежності від моменту. У блок обчислення частоти ковзання 9 виконують функцію обчислення частоти ковзання: 2RR M . (11) 2 3 Zp R Із нього сигнал надходить на перший вхід шостого суматора 12, де його порівнюють із сигналом з блока компенсації перехресних зв'язків 13. Порівняний сигнал передають на вхід блока обчислення кута 19, у якому здійснюють обчислення поточного кута повороту потоку ротора. Кут обчислюють як сума інтеграла від частоти ковзання і кута повороту ротора, помноженого на число пар полюсів двигуна Zp dt . Із третього 16 та п'ятого 17 суматорів та блока обчислення кута 19 сигнали надходять у перетворювач координат 20, в якому здійснюють перетворення вектора напруги статора з обертової системи dq в нерухому двофазну, а потім в полярну систему координат. Перетворений вектор передають на силовий перетворювач з широтно-імпульсною модуляцією 21, в якому здійснюють реалізацію вектора напруги статора, за тим до інвертора 23 та асинхронної машини 24. Інвертований струм через блок датчиків струму 27 передають на фільтр низьких частот 22, у якому обмежують частоти нижче номінальної для зростання граничного моменту та надходить до перетворювача координат 18, у якому здійснюють перетворення струму статора від трифазної нерухомої системи координат в двофазну, а потім у обертову систему dq , з якого переходить на блок компенсації перехресних зв'язків 13. Живлення відбувається через джерело постійного струму 26. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Спосіб векторного керування тяговим асинхронним двигуном з урахуванням насичення та обмеження моменту на низьких обертах, в якому задають керуючий сигнал швидкості та порівнюють з сигналом обчислення швидкості по збільшенню кута, виконують обчислення qскладової струму статора, порівнюють із компенсаційною складовою каналу управління, формують з сигналу помилки по струму сигнал завдання напруги по осі q, порівнюють із компенсаційною складовою каналу управління, виконують обчислення d-складової струму статора, використовуючи потік намагнічування в залежності від моменту, при заданому R , 4 UA 113687 U 5 10 15 порівнюють із компенсаційною складовою каналу управління, формують з сигналу помилки по струму сигнал завдання напруги по осі d, порівнюють із компенсаційною складовою каналу управління, порівнюють із компенсаційною складовою каналу управління, здійснюють перетворення вектора напруги статора з обертової системи dq в нерухому двофазну, а потім в полярну систему координат, здійснюють високочастотну фільтрацію та перетворення струму статора від трифазної нерухомої системи координат в двофазну, а потім у обертову систему dq , здійснюють реалізацію вектора напруги статора, керують процесом інвертування напруги джерела постійного струму та формування струму статора асинхронної машини, який відрізняється тим, що формують з сигналу помилки по швидкості сигнал завдання моменту, обмежують момент в залежності від частоти, обчислюють значення швидкості та гранично допустимий струм, визначають максимальний момент, який двигун здатний забезпечити, перевантажувальний момент, формують перевантажувальний момент та частоту, нижче якої починається обмеження моменту на рівні перевантажувального, задають потік ротора при роботі з постійним потоком, або оптимізації потоку ротора в залежності від моменту, виконують обчислення частоти ковзання, здійснюють обчислення поточного кута повороту потоку ротора, обмежують частоти нижче номінальної для зростання граничного моменту. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 103/10, H02P 21/04
Мітки: асинхронним, моменту, тяговим, спосіб, обертах, урахуванням, векторного, двигуном, насичення, керування, обмеження, низьких
Код посилання
<a href="https://ua.patents.su/7-113687-sposib-vektornogo-keruvannya-tyagovim-asinkhronnim-dvigunom-z-urakhuvannyam-nasichennya-ta-obmezhennya-momentu-na-nizkikh-obertakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб векторного керування тяговим асинхронним двигуном з урахуванням насичення та обмеження моменту на низьких обертах</a>
Система векторного керування асинхронним двигуном
Номер патенту: 79969
Опубліковано: 13.05.2013
Автори: Огарь Віта Олександрівна, Лиходій Ігор Олегович
МПК: H02P 21/00
Мітки: векторного, керування, двигуном, система, асинхронним
Формула / Реферат:
Система векторного керування асинхронним двигуном, яка синтезована в координатній системі d,q,0, використовує прямий та квадратурний канали регулювання, значення потокозчеплення та швидкості визначаються за допомогою відповідних блоків із значень струмів та напруг статора, яка відрізняється тим, що враховуються втрати у сталі шляхом введення в систему спостерігача стану за індуктивністю контуру намагнічування Lμ, спостерігач визначає...
Спосіб керування асинхронним двигуном при важкому рушанні та пристрій для його реалізації
Номер патенту: 84176
Опубліковано: 25.09.2008
Автори: Хребтова Оксана Анатоліївна, Гладир Андрій Іванович, Конох Ігор Сергійович, Романенко Катерина Георгіївна, Ємець Валерій Васильович, Гомілко Володимир Іванович
МПК: H02P 1/00
Мітки: двигуном, важкому, асинхронним, пристрій, рушанні, керування, реалізації, спосіб
Формула / Реферат:
1. Спосіб керування асинхронним двигуном при важкому рушанні, що полягає в підключенні асинхронного двигуна до трифазної мережі через перетворювач частоти, формуванні протягом часу t = tT електромагнітного моменту двигуна у функції часу з поступовим збільшенням до значення МП0, що дорівнює пусковому моменту двигуна, контролі процесу запуску впродовж часу t = tB шляхом обчислення ковзання s за миттєвими значеннями струму та напруги статора,...
Спосіб адаптивного частотного керування асинхронним двигуном
Номер патенту: 68806
Опубліковано: 10.04.2012
Автори: Федорейко Валерій Степанович, Луцик Ірина Богданівна, Рутило Микола Іванович, Іскерський Іван Станіславович, Петрикович Юрій Ярославович
МПК: H02P 1/26
Мітки: адаптивного, керування, асинхронним, спосіб, двигуном, частотного
Формула / Реферат:
Спосіб адаптивного частотного керування асинхронним електродвигуном, що забезпечує енергоефективне його регулювання шляхом формування оптимальної величини напруги статора, який відрізняється тим, що ця величина розраховується за відхиленням напруги, яке пропорційне різниці активної і реактивної складових потужності електродвигуна, в залежності від його механічного навантаження.
Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора
Номер патенту: 103708
Опубліковано: 25.12.2015
Автори: Кочуров Ілля Михайлович, Калінов Андрій Петрович, Мельников Вячеслав Олександрович
МПК: H02P 21/00
Мітки: спосіб, статора, асинхронним, несиметричними, двигуном, частотного, обмоток, параметрами, керування
Формула / Реферат:
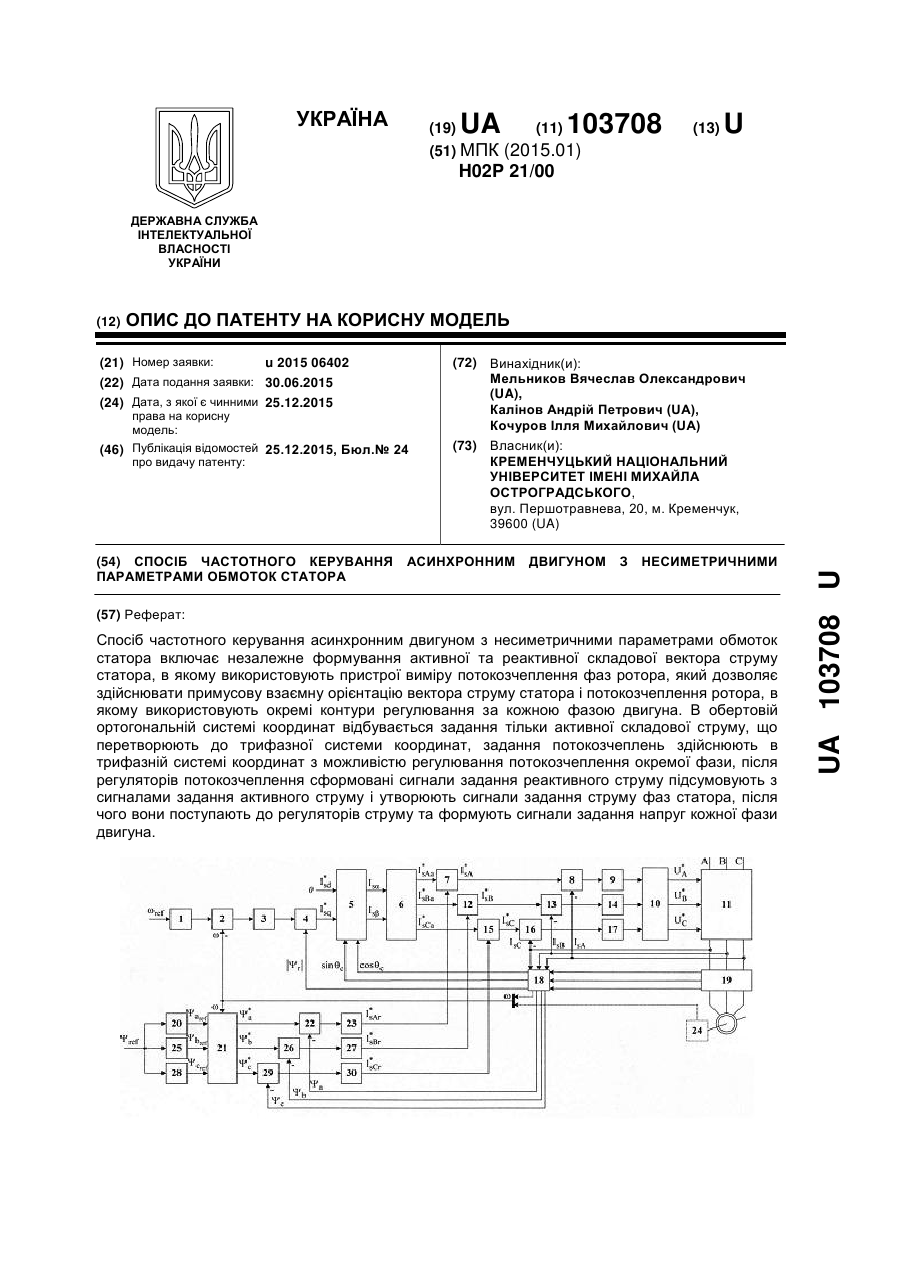
1. Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора, який включає незалежне формування активної та реактивної складової вектора струму статора, в якому використовують пристрої виміру потокозчеплення фаз ротора, який дозволяє здійснювати примусову взаємну орієнтацію вектора струму статора і потокозчеплення ротора, в якому використовують окремі контури регулювання за кожною фазою двигуна, який...
Спосіб керування асинхронним двигуном та пристрій для його реалізації
Номер патенту: 62097
Опубліковано: 15.12.2003
Автори: Сичов Сергій Дмитрович, Родькін Дмитро Йосипович, Чорний Олексій Петрович
МПК: G01R 31/34
Мітки: реалізації, спосіб, пристрій, керування, асинхронним, двигуном
Формула / Реферат:
1. Спосіб керування асинхронним двигуном, що включає підключення асинхронного двигуна через перетворювач напруги до джерела промислової частоти, вимірювання миттєвих значень напруги та струму статорного ланцюга та розрахунок моменту двигуна, який відрізняється тим, що за даними вимірів розраховують миттєву потужність та момент двигуна, вилучають змінну складову моменту та подають на регулятор системи імпульсно-фазового керування тиристорним...
Попередній патент: Пристрій резервного електропостачання відповідальних електроспоживачів промислових підприємств з компенсацією впливу несиметрії
Наступний патент: Пристрій керування потоками потужності асинхронного генератора з компенсацією неактивних складових потужності мережі
Випадковий патент: Процес діагностики метастазів медулярного раку щитоподібної залози