Багатоканальна мультипроцесорна система
Номер патенту: 18075
Опубліковано: 16.10.2006
Автори: Кривонос Юрій Георгієвич, Коваль Валерій Миколайович, Сав'як Володимир Васильович, Любарський Валерій Федорович, Сергієнко Іван Васильович, Булавенко Олег Миколайович
Формула / Реферат
1. Багатоканальна мультипроцесорна система, що містить обчислювальні вузли, яка відрізняється тим, що додатково введені блоки зв'язку, кількість яких відповідає кількості обчислювальних вузлів, причому перші входи-виходи блоків зв'язку в кожному каналі зв'язані з відповідними обчислювальними вузлами, другі входи-виходи блоків зв'язку в кожному каналі з'єднані з відповідними магістралями, треті входи-виходи кожного блока зв'язку першого каналу з'єднані через відповідну магістраль з третіми входами-виходами блоків зв'язку наступного каналу, четверті входи-виходи кожного блока зв'язку першого каналу з'єднані через відповідну магістраль з третіми входами-виходами блоків зв'язку через один канал, п'яті входи-виходи кожного блока зв'язку першого каналу з'єднані через відповідну магістраль з третіми входами-виходами блоків зв'язку останнього каналу, четверті входи-виходи кожного блока зв'язку другого каналу з'єднані через відповідну магістраль з четвертими входами-виходами блоків зв'язку наступного каналу, п'яті входи-виходи кожного блока зв'язку другого каналу з'єднані через відповідну магістраль з четвертими входами-виходами блоків зв'язку останнього каналу, п'яті входи-виходи кожного блока зв'язку третього каналу з'єднані через відповідну магістраль з п'ятими входами-виходами блоків зв'язку останнього каналу.
2. Система за п. 1, яка відрізняється тим, що блок зв'язку містить чотири вузли зв'язку, причому перша група входів-виходів кожного вузла зв'язку з'єднана з першою групою входів-виходів блока зв'язку, а другий вхід-вихід кожного вузла зв'язку є відповідно з другої по п'яту групами входів-виходів блока зв'язку.
3. Система за п. 2, яка відрізняється тим, що вузол зв'язку містить контролер інтерфейсу і блок аналізу прийому-передачі інформації, причому перша група входів-виходів вузла зв'язку з'єднана з першим входом-виходом контролера інтерфейсу, а перша, друга, третя групи інформаційних виходів і група керуючих виходів контролера інтерфейсу з'єднані з відповідними групами входів блока аналізу прийому-передачі інформації, перша інформаційна група виходів блока аналізу прийому-передачі інформації з'єднана з другою інформаційною групою входів контролера інтерфейсу, а друга група входів-виходів блока аналізу прийому-передачі інформації є другим входом-виходом вузла зв'язку.
Текст
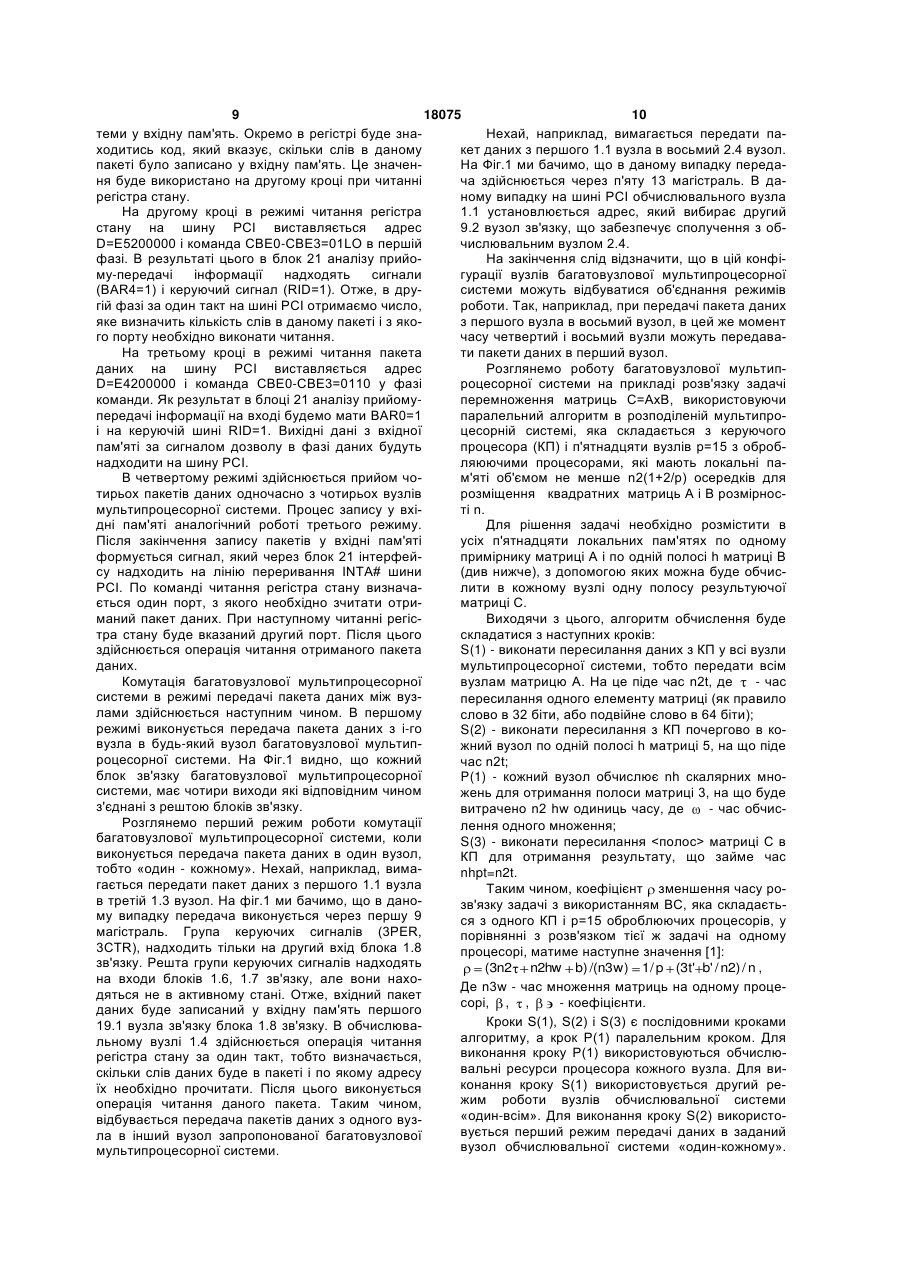
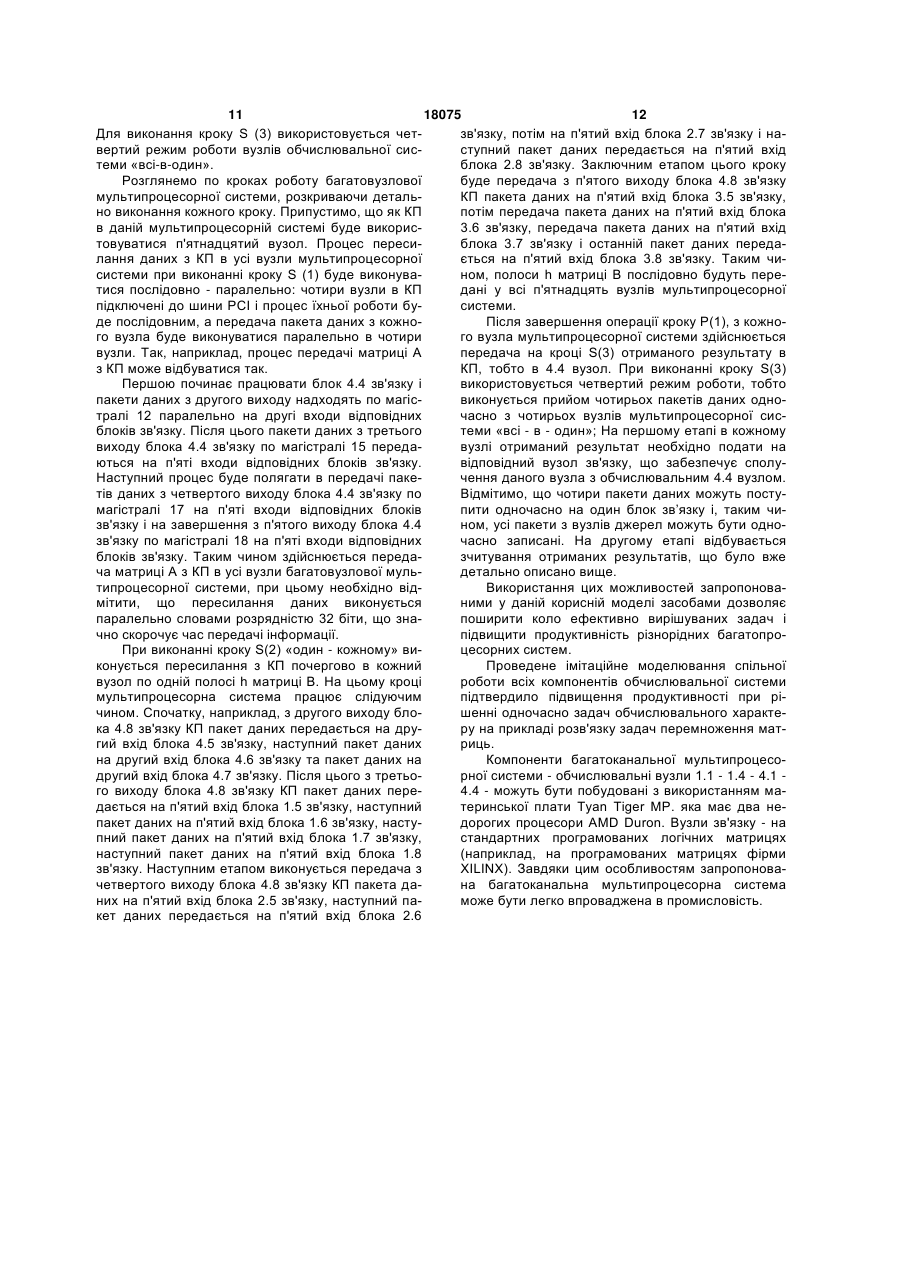
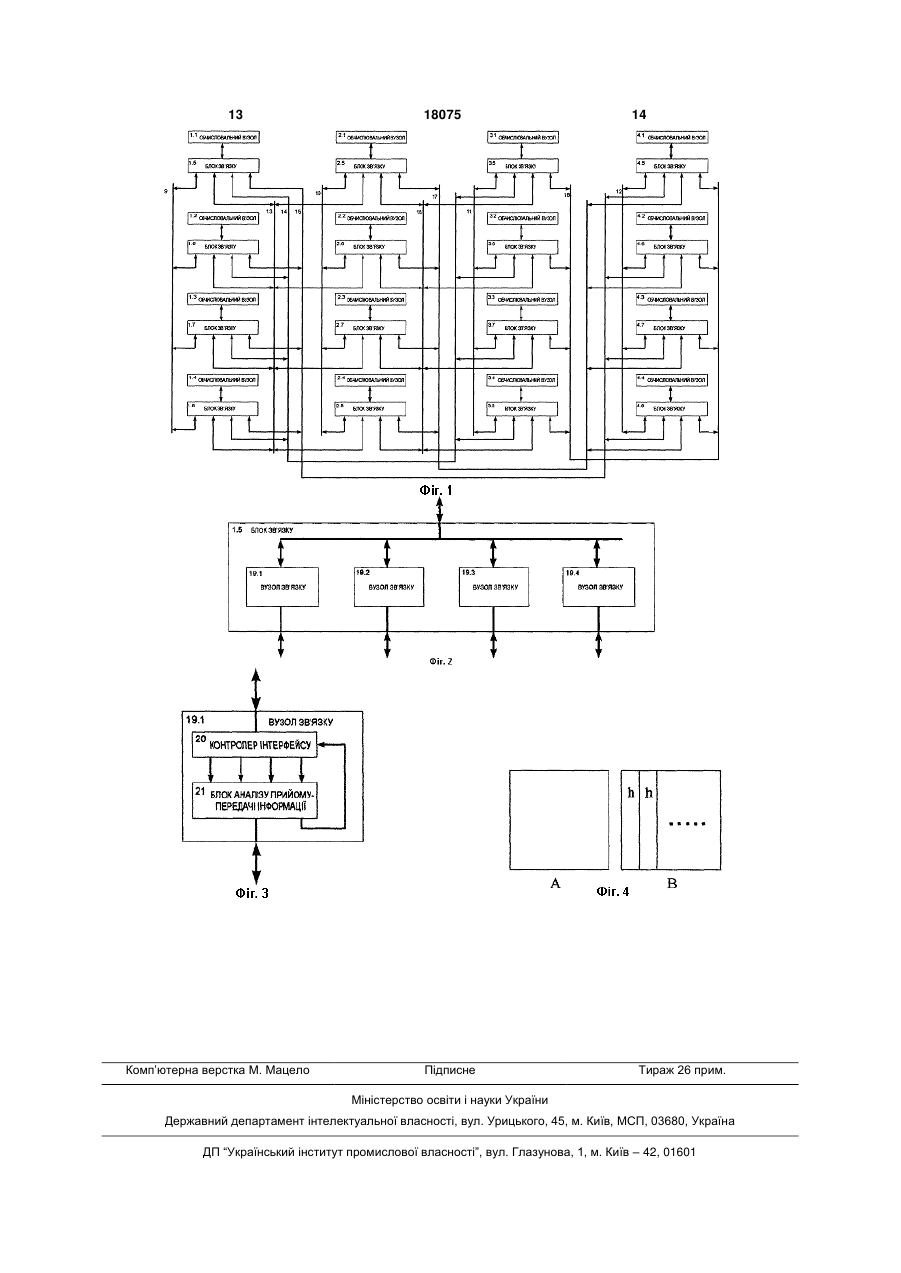
1. Багатоканальна мультипроцесорна система, що містить обчислювальні вузли, яка відрізняється тим, що додатково введені блоки зв'язку, кількість яких відповідає кількості обчислювальних вузлів, причому перші входи-виходи блоків зв'язку в кожному каналі зв'язані з відповідними обчислювальними вузлами, другі входи-виходи блоків зв'язку в кожному каналі з'єднані з відповідними магістралями, треті входи-виходи кожного блока зв'язку першого каналу з'єднані через відповідну магістраль з третіми входами-виходами блоків зв'язку наступного каналу, четверті входи-виходи кожного блока зв'язку першого каналу з'єднані через відповідну магістраль з третіми входами-виходами блоків зв'язку через один канал, п'яті входи-виходи кожного блока зв'язку першого каналу з'єднані через відповідну магістраль з третіми входамивиходами блоків зв'язку останнього каналу, четверті входи-виходи кожного блока зв'язку другого каналу з'єднані через відповідну магістраль з чет U 2 18075 1 3 18075 4 Причиною, що заважає досягненню високого ший і другий виходи третього обчислювального технічного результату є комутатор, в якому пакет вузла з'єднані відповідно з шостим і з сьомим обспочатку повністю приймається в буфер пристрою, числювальними вузлами, перший і другий виходи потім відбувається аналіз його цілісності на основі четвертого обчислювального вузла з'єднані відпоконтрольних сум і тільки після цього визначається відно з восьмим і з дев'ятим обчислювальними його подальша доля за даними адресу признавузлами, перший і другий виходи п'ятого обчислючення. вального вузла з'єднані відповідно з десятим і з Найбільш близьким до корисної моделі по теодинадцятим обчислювальними вузлами, перший і хнічній суті і ефективності роботи є обчислювальдругий виходи шостого обчислювального вузла на система, [описана в патенті Пат 5060141 США, з'єднані відповідно з дванадцятим і з тринадцятим МКИ G06F1/00 Опубл. Oct. 22, 1991], що містить обчислювальними вузлами, перший і другий вихошістнадцять обчислювальних вузлів, причому педи сьомого обчислювального вузла з'єднані відпорший і другий виходи нульового обчислювального відно з чотирнадцятим і з п'ятнадцятим обчислювузла з'єднані відповідно з нульовим і з першим вальними вузлами, перший і другий виходи обчислювальними вузлами, перший і другий виховосьмого обчислювального вузла з'єднані відповіди першого обчислювального вузла з'єднані віддно з нульовим і з першим обчислювальними вузповідно з другим і з третім обчислювальними вузлами, перший і другий виходи дев'ятого обчислюлами, перший і другий виходи другого вального вузла з'єднані відповідно з другим і з обчислювального вузла з'єднані відповідно з четтретім обчислювальними вузлами, перший і друвертим і з п'ятим обчислювальними вузлами, пергий виходи десятого обчислювального вузла з'єдший і другий виходи третього обчислювального нані відповідно з четвертим і з п'ятим обчислювавузла з'єднані відповідно з шостим і з сьомим обльними вузлами, перший і другий виходи числювальними вузлами, перший і другий виходи одинадцятого обчислювального вузла з'єднані четвертого обчислювального вузла з'єднані відповідповідно з шостим і з сьомим обчислювальними відно з восьмим і з дев'ятим обчислювальними вузлами, перший і другий виходи дванадцятого вузлами, перший і другий виходи п'ятого обчислюобчислювального вузла з'єднані відповідно з вовального вузла з'єднані відповідно з десятим і з сьмим і з дев'ятим обчислювальними вузлами, одинадцятим обчислювальними вузлами, перший і перший і другий виходи тринадцятого обчислювадругий виходи шостого обчислювального вузла льного вузла з'єднані відповідно з десятим і з одиз'єднані відповідно з дванадцятим і з тринадцятим надцятим обчислювальними вузлами, перший і обчислювальними вузлами, перший і другий виходругий виходи чотирнадцятого обчислювального ди сьомого обчислювального вузла з'єднані відповузла з'єднані відповідно з дванадцятим і з тринавідно з чотирнадцятим і з п'ятнадцятим обчислюдцятим обчислювальними вузлами, перший і друвальними вузлами, перший і другий виходи гий виходи п'ятнадцятого обчислювального вузла восьмого обчислювального вузла з'єднані відповіз'єднані відповідно з чотирнадцятим і з п'ятнадцядно з нульовим і з першим обчислювальними вузтим обчислювальними вузлами. лами, перший і другий виходи дев'ятого обчислюПричиною, що заважає досягненню очікувановального вузла з'єднані відповідно з другим і з го технічного результату є те, що в прототипі є третім обчислювальними вузлами, перший і друзатримка в передачі пакетів даних між обчислювагий виходи десятого обчислювального вузла з'єдльними вузлами. Так, відповідно до опису патенту нані відповідно з четвертим і з п'ятим обчислювавидно, що для передачі даних з нульового 110 льними вузлами, перший і другий виходи обчислювального вузла в третій 112 обчислюваодинадцятого обчислювального вузла з'єднані льний вузол інформація мусить спочатку постувідповідно з шостим і з сьомим обчислювальними пить в перший 111 обчислювальний вузол. А для вузлами, перший і другий виходи дванадцятого передачі з нульового 110 обчислювального вузла обчислювального вузла з'єднані відповідно з вов п'ятнадцятий 125 обчислювальний вузол необсьмим і з дев'ятим обчислювальними вузлами, хідно послідовно пройти три проміжних обчислюперший і другий виходи тринадцятого обчислювавальних вузла (перший 111, третій 113, сьомий льного вузла з'єднані відповідно з десятим і з оди117). надцятим обчислювальними вузлами, перший і Технічна задача, на вирішення якої направледругий виходи чотирнадцятого обчислювального на корисна модель, полягає в розробці комутаційвузла з'єднані відповідно з дванадцятим і з тринаної багатоканальної мультипроцесорної системи, дцятим обчислювальними вузлами, перший і друяка забезпечує підвищення швидкодії при передачі гий виходи п'ятнадцятого обчислювального вузла пакетів даних між двома вузлами без використанз'єднані відповідно з чотирнадцятим і з п'ятнадцяня допоміжних обчислювальних вузлів шляхом тим обчислювальними вузлами. введення в склад системи блоків зв'язку, кількість Загальними признаками прототипу з систеяких відповідає кількості обчислювальних вузлів, мою, що пропонується, є обчислювальні вузли, завдяки чому забезпечується зв'язок обчислювапричому перший і другий виходи нульового обчисльного вузла з іншими обчислювальними вузлами. лювального вузла з'єднані відповідно з нульовим і Рішення поставленої задачі досягається тим, з першим обчислювальними вузлами, перший і що в багатоканальну мультипроцесорну систему, другий виходи першого обчислювального вузла що містить обчислювальні вузли введені блоки з'єднані відповідно з другим і з третім обчислювазв'язку, кількість яких відповідає кількості обчисльними вузлами, перший і другий виходи другого лювальних вузлів, причому перші входи-виходи обчислювального вузла з'єднані відповідно з четблоків зв'язку в кожному каналі зв'язані з відповідвертим і з п'ятим обчислювальними вузлами, перними обчислювальними вузлами, другі входи 5 18075 6 виходи блоків зв'язку в кожному каналі з'єднані з в кожному каналі з'єднані з відповідними магістравідповідними магістралями, треті входи-виходи лями 9, 10, 11, 12, треті входи-виходи кожного кожного блока зв'язку першого каналу з'єднані чеблока зв'язку 1.5 - 1.8 першого каналу з'єднані через відповідну магістраль з третіми входамирез відповідну магістраль 13 з третіми входамивиходами блоків зв'язку наступного каналу, четвевиходами блоків зв'язку 2.5 - 2.8 наступного канарті входи-виходи кожного блока зв'язку першого лу, четверті входи-виходи кожного блока зв'язку каналу з'єднані через відповідну магістраль з тре1.5 - 1.8 першого каналу з'єднані через відповідну тіми входами-виходами блоків зв'язку через один магістраль 14 з третіми входами-виходами блоків канал, п'яті входи-виходи кожного блока зв'язку зв'язку 3.5 - 3.8 через один канал, п'яті входипершого каналу з'єднані через відповідну магіствиходи кожного блока зв'язку 1.5-1.8 першого караль з третіми входами-виходами блоків зв'язку налу з'єднані через відповідну магістраль 15 з треостаннього каналу, четверті входи-виходи кожного тіми входами-виходами блоків зв'язку 4.5 - 4.8 блока зв'язку другого каналу з'єднані через відпоостаннього каналу, четверті входи-виходи кожного відну магістраль з четвертими входами-виходами блока зв'язку 2.5 - 2.8 другого каналу з'єднані чеблоків зв'язку наступного каналу, п'яті входирез відповідну магістраль 16 з четвертими входавиходи кожного блока зв'язку другого каналу з'єдми-виходами блоків зв'язку 3.5 - 3.8 наступного нані через відповідну магістраль з четвертими каналу, п'яті входи-виходи кожного блока зв'язку входами-виходами блоків зв'язку останнього кана2.5 - 2.8 другого каналу з'єднані через відповідну лу, п'яті входи-виходи кожного блока зв'язку тремагістраль 17 з четвертими входами-виходами тього каналу з'єднані через відповідну магістраль з блоків зв'язку 4.5 - 4.8 останнього каналу, п'яті п'ятими входами-виходами блоків зв'язку останвходи-виходи кожного блока зв'язку 3.5-3.8 третьонього каналу. го каналу з'єднані через відповідну магістраль 18 з Відмітними ознаками системи, що пропонуєтьп'ятими входами-виходами блоків зв'язку 4.5-4.8 ся є блоки зв'язку, причому перші входи-виходи останнього каналу. блоків зв'язку в кожному каналі зв'язані з відповідБлок зв'язку 1.5 (Фіг.2) містить чотири вузла ними обчислювальними вузлами, а наступні вхо19.1 - 19.4 зв'язку, причому перша група входівди-виходи блоків зв'язку зв'язані між собою. виходів кожного вузла зв'язку з'єднана з першою Блок зв'язку містить чотири вузла зв'язку, пригрупою входів-виходів блока зв'язку 1.5, а другий чому перша група входів-виходів кожного вузла вхід-вихід кожного вузла 19.1 - 19.4 зв'язку є відпозв'язку з'єднана з першою групою входів-виходів відно з другої по п'яту групами входів-виходів блоблока зв'язку, а другий вхід-вихід кожного вузла ка зв'язку 1.5. зв'язку є відповідно з другої по п'яту групами вхоВузол 19.1 зв'язку (Фіг.3) містить контролер індів-виходів блока зв'язку. терфейсу 20 і блок 21 аналізу прийому-передачі Вузол зв'язку містить контролер інтерфейсу і інформації, причому перша група входів-виходів блок аналізу прийому-передачі інформації, причовузла 19.1 зв'язку з'єднана з контролером інтерму перша група входів-виходів вузла зв'язку з'єдфейсу 20, а перша, друга, третя групи інформаційнана з першим входом-виходом контролера інтених виходів і група керуючих виходів контролера рфейсу, а перша, друга, третя групи інтерфейсу 20 з'єднані з відповідними групами інформаційних виходів і група керуючих виходів входів блока 21 аналізу прийому-передачі інфорконтролера інтерфейсу з'єднані з відповідними мації, перша група виходів блока 21 аналізу пригрупами входів блока аналізу прийому-передачі йому-передачі інформації з'єднана з групою входів інформації, перша інформаційна група виходів контролера інтерфейсу 20, а друга група входівблока аналізу прийому-передачі інформації з'єдвиходів блока аналізу прийому-передачі інформанана з другою інформаційною групою входів контції є другим входом-виходом вузла 19.1 зв'язку. ролера інтерфейсу, а друга група входів-виходів Контролер 20 інтерфейсу реалізовано на ПЛІС блока аналізу прийому-передачі інформації є дру[Інтегрований РСІ контролер на ПЛІС Xilinx Технічгим входом-виходом вузла зв'язку. ний опис Scan Eng Telecom – 1999] Введення в систему цих ознак дозволяє підhttp://www.xilinx.ru/mx-pci21s.htm; Універсальна вищити швидкодію при передачі пакетів даних між плата цифрової обробки сигналів XDSP-680. Техдвома вузлами без використання проміжних обчинічний опис. - Scan Eng. Telecom. - 1999 слювальних вузлів (http://www.xilinx.ru/xdsp-680.htm)]. На Фіг.1 представлена функціональна схема Багатоканальна мультипроцесорна система запропонованої багатоканальної мультипроцесорпередвизначена для забезпечення підвищення ної системи; на Фіг.2 - функціональна схема блока швидкодії при передачі пакетів даних між вузлами зв'язку; на Фіг.3 - функціональна схема вузла зв'ябез використання комутаційного пристрою, а також зку, на Фіг.4 - примірник матриці А і по одній полосі дозволяє реалізувати чотири режими роботи. h матриці В. Вузол 19.1 зв'язку і-го блока зв'язку призначеФункціональна схема запропонованої багатоний для прийому з шини РСІ пакета даних і його канальною мультипроцесорної системи (Фіг.1), передачу через групу інформаційних-керуючих кожний канал якої містить обчислювальні вузли 1.1 виходів в j-ий блок зв'язку. В вузлі 19.1 зв'язку та- 1.4, 2.1 - 2.4, 3.1 - 3.4, 4.1 - 4.4, блоки зв'язку 1.5 кож здійснюється прийом з другого входу-виходу 1.8, 2.5 - 2.8, 3.5 - 3.8, 4.5 - 4.8, причому перші пакета даних інформаційних-керуючих сигналів з входи-виходи блоків зв'язку 1.5 - 1.8, 2.5 - 2.8, 3.5 інших блоків зв'язку. 3.8, 4.5 - 4.8 в кожному каналі зв'язані з відповідКонтролер інтерфейсу 20 передвизначений ними обчислювальними вузлами 1.1 - 1.4, 2.1 - 2.4, для узгодження вузла зв'язку з шиною РСІ. 3.1 - 3.4, 4.1 - 4.4, другі входи-виходи блоків зв'язку 7 18075 8 Блок 21 аналізу прийому-передачі інформації команди запису в пам'ять, з виходу контролера передвизначений для прийому (Memory Write) з інтерфейсу 20 в блок 21 аналізу прийому-передачі блока 20 інтерфейсу пакета даних. В блоці визнаінформації надходять сигнали (BAR0=1, BAR1=0, чається шлях передачі і запису пакета даних у BAR2=0, BAR3=0, BAR4=0, BAR5=0 і WR=1). На відповідну вихідну пам'ять. Блок 21 аналізу придругій фазі першою шиною AD надходить пакет йому-передачі інформації здійснює читання отриданих, а на другій шині СВЕ вказуються задіяні маного пакета даних з інших вузлів і його передачу байти 32-розрядного слова. В цей момент в блок через шину в контролер 20 інтерфейсу. 21 аналізу прийому-передачі інформації надходить Контролер 20 інтерфейсу реалізований на сигнал (WE=1). Процес запису пакета даних у виПЛІС фірми Xilinx серії ХС4000Х. Контролер функхідну пам'ять і його передача на вихідну другу шиціонує в повній відповідності з вимогами специфіну блока 21 аналізу прийому-передачі інформації кації локальної шини РСІ 2.1. Він забезпечує набуде здійснюватися таким чином. З першої групи ступні характеристики: підтримка протоколу (AD0-AD31) і другої групи (СВЕ0-СВЕ3) інформаPlug&Play на частоті до 33МГц в режимі Slave (виційних виходів контролера інтерфейсу 20 дані наконавець); шість адресних регістрів конфігурації дходять в блок 21 аналізу прийому-передачі інфо(BAR0, BAR1, BAR2. BAR3, BAR4, BAR5), підтримрмації. Відзначимо, що ці дані змінюють свій стан ка команд роботи з пам'яттю Memory Read, кожний такт під дією керуючого сигналу (CLK) в Memory Write; підтримка команд Configuration залежності від коду другої групи (СВЕ0-СВЕ3). Read, Configuration Write; одна лінія переривання Дані надходять для запису на входи вихідної паINTA#. м'яті. Необхідно відзначити, що вихідні пам'яті - це Нами, для перевірки дієздатності сполучення стандартні двопортові макроси в даному кристалі. двох вузлів розроблений вузол зв'язку, який місВхідні сигнали BAR0=1, WR=1, WE=1 надходять в тить інтегрований контролер шини РСІ інтерфейсу блок 21 аналізу прийому-передачі інформації і і додаток користувача. Контролер інтерфейсу 20 пакет даних за час дії другої фази буде записаний забезпечує обмін даними з шиною РСІ, а блок 21 у вихідну пам'ять. В період запису у вихідну пааналізу прийому-передачі інформації здійснює м'ять починається процес передачі пакета даних в передачу даних кабелем в інший вузол зв'язку, а інший вузол під керівництвом керуючих сигналів також забезпечує прийом даних з іншого вузла 1PER та 1CTR. Після закінчення другої фази, чезв'язку. Об'єднання інтерфейсної частини додатку рез один такт, змінюють свій стан вхідні сигнали користувача (блок 21 аналізу прийому-передачі (BAR0=0), (WR=0), (WE=0). інформації) з повністю протестованим контролеВ другому режимі пакет даних передається ром РСІ реалізується в єдиному кристалі ПЛІС одночасно в чотири вузли мультипроцесорної сисXILINX 100PQ240. теми (широкомовний режим роботи). Блок 21 анаВузол 19.1 зв'язку дозволяє реалізувати чотилізу прийому-передачі інформації в цьому режимі ри режими роботи: (1) передачу пакета даних в буде працювати так. В першій фазі на шині РСІ один із чотирьох заданих вузлів багатоканальної необхідно встановити адрес Е5600000. В цьому мультипроцесорної системи, тобто «один - кожновипадку в блок 21 аналізу прийому-передачі інфому», (2) передачу пакета даних одночасно в чотирмації надійде сигнал (BAR5), який визначає вибір ри вузли багатоканальної мультипроцесорної сисп'ятого базового адресного регістра. Цей сигнал теми («один - всім», широкомовний режим дозволяє почати роботу усіх вузлів управління роботи), (3) прийом одного пакета даних з одного вихідною пам'яттю. В цьому випадку другий вихід вузла багатоканальної мультипроцесорної системістить групу інформаційних сигналів і восьми акми, (4) прийом чотирьох пакетів даних одночасно з тивних керуючих сигналів (1PER, 1CTR, 2PER, чотирьох вузлів багатоканальної мультипроцесор2CTR. 3PER, 3CTR, 4PER, 4CTR). Керуючі сигнали ної системи «всі - в - один». попарно надходять в чотири вузли, зв'язані з заВ першому режимі блок 21 аналізу прийомупропонованим вузлом. Отже, пакет даних, що пепередачі інформації, а, в цілому, і вузол 19.1 зв'язредається з одного вузла під впливом керуючих ку працює таким чином. При включенні машини сигналів буде записаний в чотири вузли мультипопераційна система визначає задану плату на широцесорної системи одночасно. Процес запису ні РСІ, визначає наявність шести портів (базові пакета даних в вузол докладно розглянутий в треадресні регістри) і призначає їм адреса. Нехай, тьому і четвертому режимах. наприклад, нульовий базовий адресний регістр В третьому режимі здійснюється прийом паке(BAR0) має адрес Е4200000. Перший базовий адта даних з одного вузла мультипроцесорної сисресний регістр (BAR1) -адрес Е4600000. Другий теми. В цьому режимі відбуваються наступні пробазовий адресний регістр (BAR2) - адрес цеси. На першому кроці відбувається Е4АООООО. Третій базовий адресний регістр безпосередньо запис пакета даних, який надхо(BAR3) - адрес Е4Е00000. Четвертий базовий аддить з іншого вузла. На другому кроці здійснюєтьресний регістр (BAR4) - адрес Е5200000. П'ятий ся операція читання регістра стану, визначаючи базовий адресний регістр (BAR5) - адрес кількість слів в даному пакеті і порт в данному Е5600000. Звернення до плати, підключеної до блоці зв'язку, з якого необхідно прочитати отримашини РСІ складається з двох фаз. На першій фазі ну інформацію. На третьому кроці здійснюється на шині РСІ виставляється адрес базового адресбезпосередньо операція читання пакета даних. ного регістра і команда виконання, а на другій фазі Розглянемо роботу блока 21 аналізу прийомуподається пакет даних і показчик кількості байтів. передачі інформації послідовно на кожному кроці. На першій фазі при надходженні першою шиною На першому кроці виконується прийом одного паAD адресу Е4200000, а другою шиною СВЕ (0111) кета даних з іншого вузла мультипроцесорної сис 9 18075 10 теми у вхідну пам'ять. Окремо в регістрі буде знаНехай, наприклад, вимагається передати паходитись код, який вказує, скільки слів в даному кет даних з першого 1.1 вузла в восьмий 2.4 вузол. пакеті було записано у вхідну пам'ять. Це значенНа Фіг.1 ми бачимо, що в даному випадку переданя буде використано на другому кроці при читанні ча здійснюється через п'яту 13 магістраль. В дарегістра стану. ному випадку на шині РСІ обчислювального вузла На другому кроці в режимі читання регістра 1.1 установлюється адрес, який вибирає другий стану на шину РСІ виставляється адрес 9.2 вузол зв'язку, що забезпечує сполучення з обD=E5200000 і команда CBE0-CBE3=01LO в першій числювальним вузлом 2.4. фазі. В результаті цього в блок 21 аналізу прийоНа закінчення слід відзначити, що в цій конфіму-передачі інформації надходять сигнали гурації вузлів багатовузлової мультипроцесорної (BAR4=1) і керуючий сигнал (RID=1). Отже, в друсистеми можуть відбуватися об'єднання режимів гій фазі за один такт на шині РСІ отримаємо число, роботи. Так, наприклад, при передачі пакета даних яке визначить кількість слів в даному пакеті і з якоз першого вузла в восьмий вузол, в цей же момент го порту необхідно виконати читання. часу четвертий і восьмий вузли можуть передаваНа третьому кроці в режимі читання пакета ти пакети даних в перший вузол. даних на шину РСІ виставляється адрес Розглянемо роботу багатовузлової мультипD=E4200000 і команда СВЕ0-СВЕ3=0110 у фазі роцесорної системи на прикладі розв'язку задачі команди. Як результат в блоці 21 аналізу прийомуперемноження матриць С=АхВ, використовуючи передачі інформації на вході будемо мати BAR0=1 паралельний алгоритм в розподіленій мультипроі на керуючій шині RID=1. Вихідні дані з вхідної цесорній системі, яка складається з керуючого пам'яті за сигналом дозволу в фазі даних будуть процесора (КП) і п'ятнадцяти вузлів р=15 з обробнадходити на шину РСІ. ляюючими процесорами, які мають локальні паВ четвертому режимі здійснюється прийом чом'яті об'ємом не менше n2(1+2/p) осередків для тирьох пакетів даних одночасно з чотирьох вузлів розміщення квадратних матриць А і В розмірносмультипроцесорної системи. Процес запису у вхіті n. дні пам'яті аналогічний роботі третього режиму. Для рішення задачі необхідно розмістити в Після закінчення запису пакетів у вхідні пам'яті усіх п'ятнадцяти локальних пам'ятях по одному формується сигнал, який через блок 21 інтерфейпримірнику матриці А і по одній полосі h матриці В су надходить на лінію переривання INTA# шини (див нижче), з допомогою яких можна буде обчисРСІ. По команді читання регістра стану визначалити в кожному вузлі одну полосу результуючої ється один порт, з якого необхідно зчитати отриматриці C. маний пакет даних. При наступному читанні регісВиходячи з цього, алгоритм обчислення буде тра стану буде вказаний другий порт. Після цього складатися з наступних кроків: здійснюється операція читання отриманого пакета S(1) - виконати пересилання даних з КП у всі вузли даних. мультипроцесорної системи, тобто передати всім Комутація багатовузлової мультипроцесорної вузлам матрицю А. На це піде час n2t, де - час системи в режимі передачі пакета даних між вузпересилання одного елементу матриці (як правило лами здійснюється наступним чином. В першому слово в 32 біти, або подвійне слово в 64 біти); режимі виконується передача пакета даних з і-го S(2) - виконати пересилання з КП почергово в ковузла в будь-який вузол багатовузлової мультипжний вузол по одній полосі h матриці 5, на що піде роцесорної системи. На Фіг.1 видно, що кожний час n2t; блок зв'язку багатовузлової мультипроцесорної P(1) - кожний вузол обчислює nh скалярних мносистеми, має чотири виходи які відповідним чином жень для отримання полоси матриці 3, на що буде з'єднані з рештою блоків зв'язку. витрачено n2 hw одиниць часу, де - час обчисРозглянемо перший режим роботи комутації лення одного множення; багатовузлової мультипроцесорної системи, коли S(3) - виконати пересилання матриці С в виконується передача пакета даних в один вузол, КП для отримання результату, що займе час тобто «один - кожному». Нехай, наприклад, вимаnhpt=n2t. гається передати пакет даних з першого 1.1 вузла Таким чином, коефіцієнт зменшення часу ров третій 1.3 вузол. На фіг.1 ми бачимо, що в данозв'язку задачі з використанням ВС, яка складаєтьму випадку передача виконується через першу 9 ся з одного КП і р=15 оброблюючих процесорів, у магістраль. Група керуючих сигналів (3PER, порівнянні з розв'язком тієї ж задачі на одному 3CTR), надходить тільки на другий вхід блока 1.8 процесорі, матиме наступне значення [1]: зв'язку. Решта групи керуючих сигналів надходять (3n2 n2hw b) /(n3w ) 1/ p (3t' b' / n2) / n , на входи блоків 1.6, 1.7 зв'язку, але вони нахоДе n3w - час множення матриць на одному процедяться не в активному стані. Отже, вхідний пакет сорі, , , - коефіцієнти. даних буде записаний у вхідну пам'ять першого Кроки S(1), S(2) i S(3) є послідовними кроками 19.1 вузла зв'язку блока 1.8 зв'язку. В обчислюваалгоритму, а крок Р(1) паралельним кроком. Для льному вузлі 1.4 здійснюється операція читання виконання кроку Р(1) використовуються обчислюрегістра стану за один такт, тобто визначається, вальні ресурси процесора кожного вузла. Для вискільки слів даних буде в пакеті і по якому адресу конання кроку S(1) використовується другий реїх необхідно прочитати. Після цього виконується жим роботи вузлів обчислювальної системи операція читання даного пакета. Таким чином, «один-всім». Для виконання кроку S(2) використовідбувається передача пакетів даних з одного вузвується перший режим передачі даних в заданий ла в інший вузол запропонованої багатовузлової вузол обчислювальної системи «один-кожному». мультипроцесорної системи. 11 18075 12 Для виконання кроку S (3) використовується четзв'язку, потім на п'ятий вхід блока 2.7 зв'язку і навертий режим роботи вузлів обчислювальної сисступний пакет даних передається на п'ятий вхід теми «всі-в-один». блока 2.8 зв'язку. Заключним етапом цього кроку Розглянемо по кроках роботу багатовузлової буде передача з п'ятого виходу блока 4.8 зв'язку мультипроцесорної системи, розкриваючи детальКП пакета даних на п'ятий вхід блока 3.5 зв'язку, но виконання кожного кроку. Припустимо, що як КП потім передача пакета даних на п'ятий вхід блока в даній мультипроцесорній системі буде викорис3.6 зв'язку, передача пакета даних на п'ятий вхід товуватися п'ятнадцятий вузол. Процес пересиблока 3.7 зв'язку і останній пакет даних передалання даних з КП в усі вузли мультипроцесорної ється на п'ятий вхід блока 3.8 зв'язку. Таким чисистеми при виконанні кроку S (1) буде виконуваном, полоси h матриці В послідовно будуть перетися послідовно - паралельно: чотири вузли в КП дані у всі п'ятнадцять вузлів мультипроцесорної підключені до шини РСІ і процес їхньої роботи бусистеми. де послідовним, а передача пакета даних з кожноПісля завершення операції кроку Р(1), з кожного вузла буде виконуватися паралельно в чотири го вузла мультипроцесорної системи здійснюється вузли. Так, наприклад, процес передачі матриці А передача на кроці S(3) отриманого результату в з КП може відбуватися так. КП, тобто в 4.4 вузол. При виконанні кроку S(3) Першою починає працювати блок 4.4 зв'язку і використовується четвертий режим роботи, тобто пакети даних з другого виходу надходять по магісвиконується прийом чотирьох пакетів даних однотралі 12 паралельно на другі входи відповідних часно з чотирьох вузлів мультипроцесорної сисблоків зв'язку. Після цього пакети даних з третього теми «всі - в - один»; На першому етапі в кожному виходу блока 4.4 зв'язку по магістралі 15 передавузлі отриманий результат необхідно подати на ються на п'яті входи відповідних блоків зв'язку. відповідний вузол зв'язку, що забезпечує сполуНаступний процес буде полягати в передачі пакечення даного вузла з обчислювальним 4.4 вузлом. тів даних з четвертого виходу блока 4.4 зв'язку по Відмітимо, що чотири пакети даних можуть постумагістралі 17 на п'яті входи відповідних блоків пити одночасно на один блок зв’язку і, таким чизв'язку і на завершення з п'ятого виходу блока 4.4 ном, усі пакети з вузлів джерел можуть бути однозв'язку по магістралі 18 на п'яті входи відповідних часно записані. На другому етапі відбувається блоків зв'язку. Таким чином здійснюється передазчитування отриманих результатів, що було вже ча матриці А з КП в усі вузли багатовузлової мульдетально описано вище. типроцесорної системи, при цьому необхідно відВикористання цих можливостей запропоновамітити, що пересилання даних виконується ними у даній корисній моделі засобами дозволяє паралельно словами розрядністю 32 біти, що знапоширити коло ефективно вирішуваних задач і чно скорочує час передачі інформації. підвищити продуктивність різнорідних багатопроПри виконанні кроку S(2) «один - кожному» вицесорних систем. конується пересилання з КП почергово в кожний Проведене імітаційне моделювання спільної вузол по одній полосі h матриці В. На цьому кроці роботи всіх компонентів обчислювальної системи мультипроцесорна система працює слідуючим підтвердило підвищення продуктивності при річином. Спочатку, наприклад, з другого виходу блошенні одночасно задач обчислювального характека 4.8 зв'язку КП пакет даних передається на друру на прикладі розв'язку задач перемноження матгий вхід блока 4.5 зв'язку, наступний пакет даних риць. на другий вхід блока 4.6 зв'язку та пакет даних на Компоненти багатоканальної мультипроцесодругий вхід блока 4.7 зв'язку. Після цього з третьорної системи - обчислювальні вузли 1.1 - 1.4 - 4.1 го виходу блока 4.8 зв'язку КП пакет даних пере4.4 - можуть бути побудовані з використанням мадається на п'ятий вхід блока 1.5 зв'язку, наступний теринської плати Tyan Tiger MP. яка має два непакет даних на п'ятий вхід блока 1.6 зв'язку, настудорогих процесори AMD Duron. Вузли зв'язку - на пний пакет даних на п'ятий вхід блока 1.7 зв'язку, стандартних програмованих логічних матрицях наступний пакет даних на п'ятий вхід блока 1.8 (наприклад, на програмованих матрицях фірми зв'язку. Наступним етапом виконується передача з XILINX). Завдяки цим особливостям запропоновачетвертого виходу блока 4.8 зв'язку КП пакета дана багатоканальна мультипроцесорна система них на п'ятий вхід блока 2.5 зв'язку, наступний паможе бути легко впроваджена в промисловість. кет даних передається на п'ятий вхід блока 2.6 13 Комп’ютерна верстка М. Мацело 18075 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultichannel multiprocessor system
Автори англійськоюBulavenko Oleh Mykolaiovych, Koval Valerii Mykolaiovych, Kryvonos Yurii Heorhiiovych, Liubarskyi Valerii Fedorovych, Serhiienko Ivan Vasyliovych
Назва патенту російськоюМногоканальная многопроцессорная система
Автори російськоюБулавенко Олег Николаевич, Коваль Валерий Николаевич, Кривонос Юрий Георгиевич, Любарский Валерий Федорович, Сергиенко Иван Васильевич
МПК / Мітки
МПК: G06F 1/00
Мітки: мультипроцесорна, багатоканальна, система
Код посилання
<a href="https://ua.patents.su/7-18075-bagatokanalna-multiprocesorna-sistema.html" target="_blank" rel="follow" title="База патентів України">Багатоканальна мультипроцесорна система</a>
Багатоканальна електромагнітна пошуково-вимірювальна система

Номер патенту: 55043
Опубліковано: 17.03.2003
Автори: Драбич Олег Петрович, Кичма Андрій Олексійович, Драбич Петро Петрович, Коваль Роман Ілліч, Стецько Ігор Григорович, Банахевич Юрій Володимирович, Яворський Ігор Миколайович
МПК: G01R 33/02, G01R 19/00, G01V 3/10
Мітки: система, пошуково-вимірювальна, багатоканальна, електромагнітна
Формула / Реферат:
Багатоканальна електромагнітна пошуково-вимірювальна система, що складається з ближньої і дальньої до обстежуваної комунікації пар намотаних на окремих феритових осердях приймальних та калібраційних котушок, калібраційного генератора, резистора, вмикача, блока попередніх підсилювачів, блока вузькосмугових підсилювачів, блока перетворювачів змінної напруги в постійну, обчислювального блока, блока індикаторів і генератора змінного струму, в...
Багатоканальна система контролю параметрів газотурбінної установки
Номер патенту: 49036
Опубліковано: 16.09.2002
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/00
Мітки: установки, система, газотурбінної, параметрів, багатоканальна, контролю
Формула / Реферат:
Багатоканальна система контролю параметрів газотурбінної установки, яка містить генератор еталонної частоти, елемент АБО, послідовно з'єднані блок формувачів, блок сигналізаторів та блок елементів І, який відрізняється тим, що додатково уведені блок комутації частоти, операційний блок, блок керованих узгоджуючих пристроїв, джерело напруги, блок компараторів, блок одновібраторів та блок конденсаторів входи якого з'єднані з вхідними ланцюгами...
Багатоканальна система керування вібраційними випробуваннями виробів в режимі полігармонічного резонансу

Номер патенту: 71251
Опубліковано: 15.11.2004
Автори: Личкатий Євген Олександрович, Божко Олександр Євгенович
МПК: G05D 19/00
Мітки: система, полігармонічного, резонансу, керування, режимі, виробів, вібраційними, багатоканальна, випробуваннями
Формула / Реферат:
Багатоканальна система керування вібраційними випробуваннями виробів в режимі полігармонічного резонансу, що містить загальні для всіх каналів, послідовно з'єднані суматор, підсилювач потужності, збудник коливань з встановленим на ньому випробуваним об'єктом, з першим віброперетворювачем, зв'язаним з узгоджувальним підсилювачем, а також встановлені в кожному каналі порівняльний пристрій, виходом підключений до входу керованого по частоті...
Мультипроцесорна багатофункціональна система цифрової індикації
Номер патенту: 2269
Опубліковано: 15.01.2004
Автори: Хрестолюбов Віктор Олександрович, Сорокін Олександр Ігорович
МПК: B23Q 17/00
Мітки: мультипроцесорна, багатофункціональна, цифрової, система, індикації
Формула / Реферат:
Мультипроцесорна багатофункціональна система цифрової індикації для металорізального устаткування, що містить електронну схему обчислювачів, виконану з можливістю взаємодії з перетворювачами лінійних і кругових переміщень, і блок цифрової індикації, яка відрізняється тим, що система оснащена додатковим обчислювачем обертів і подач, при цьому електронна схема обчислювачів реалізована на базі однокристальних мікро-ЕОМ і контроль по кожній...
Уніфікована багатоканальна розподільча система unified multichannel distribution system – (u.m.d.s.)
Номер патенту: 41701
Опубліковано: 17.09.2001
Автори: Працюк Олег Анатолійович, Галич Віктор Миколайович, Даниленко Андрій Миколайович, Литвиненко Владлен Олександрович
МПК: H04B 7/165
Мітки: multichannel, distribution, system, unified, u.m.d.s, багатоканальна, система, розподільча, уніфікована
Формула / Реферат:
1. Уніфікована багатоканальна розподільча система, що складається з центральної станції, до якої входять приймально-передавальна антена з фідером, сполученим з НВЧ приймачем-передавачем, що містить передавальні НВЧ-блоки, приймальні НВЧ-блоки, модулятори, демодулятори, пристрій складання та розподілу каналів, поляризатор та приймальні абонентські станції, яка відрізняється тим, що НВЧ приймач-передавач центральної станції додатково...
Попередній патент: Пристрій захисту від струмів короткого замикання
Наступний патент: Пристрій для кріплення бойкової плити преса
Випадковий патент: Кристалізатор валковий