Спосіб і пристрій для управління і контролю залізничної станції
Формула / Реферат
1. Спосіб управління і контролю залізничної станції, яка містить виконавчі і контрольні елементи і через яку можуть бути прокладені щонайменше два маршрути для залізничних транспортних засобів за допомогою процесу управління, який на вимогу формування маршруту всупереч іншим вимогам на формування інших маршрутів і умов блокує, а потім переводить всі задіяні в цьому маршруті виконавчі елементи в потрібні положення, який відрізняється тим, що кожну зміну положення чи стану виконавчих елементів, пропоновану процесом управління, здійснюють лише після успішної перевірки на прийнятність процесом контролю, незалежним від процесу управління, шляхом перевірки факту використання виконавчого та/або контрольного елемента, що має бути блокованим чи переведеним при формуванні, а за необхідністю також і розформуванні маршруту, уже сформованим маршрутом.
2. Спосіб згідно з п. 1, який відрізняється тим, що процес управління побудований за принципом плану колій станції, а процес контролю побудований за принципом таблиці залежності стрілок і сигналів або процес управління побудований за принципом таблиці залежності стрілок і сигналів, а процес контролю побудований за принципом плану колій станції.
3. Спосіб згідно з п. 1 або 2, який відрізняється тим, що контроль здійснюють після загального блокування всіх виконавчих елементів або після блокуванням і перед переведенням кожного окремого виконавчого елемента.
4. Спосіб згідно з п. 2 або 3, який відрізняється тим, що всі сформовані діючим за принципом таблиці залежності стрілок і сигналів процесом управління команди поелементно верифікують в процесі контролю за принципом плану колій на основі дійсних положень виконавчих елементів та інформації, одержаної від контрольних елементів, із урахуванням встановлених критеріїв, зокрема, маршрутів, що підлягають формуванню, можливих конфліктів з уже сформованими маршрутами та/або необхідного захисту від бокових наїздів, і розблоковують в разі відсутності конфліктів.
5. Спосіб згідно з п. 4, який відрізняється тим, що при здійсненні діючого за принципом плану колій станції процесу контролю використовують перелік параметрів, який служить для контролю змін положень елементів, безпосередньо не використовуваних в маршруті, що підлягає формуванню.
6. Спосіб згідно з одним із попередніх пунктів, який відрізняється тим, що поелементну верифікацію в процесі контролю здійснюють згідно з правилами безпеки руху на залізниці.
7. Спосіб згідно з одним із попередніх пунктів, який відрізняється тим, що з використанням процесу управління контролюють проходження транспортного засобу маршрутом і розблоковують виконавчі елементи для розформування маршруту.
8. Спосіб згідно з одним із пунктів 2-7, який відрізняється тим, що дані розблокованого процесом контролю маршруту записують в контрольований процесом контролю запам'ятовуючий пристрій, що містить дані вже сформованих маршрутів, і використовують для контролю інших маршрутів, що підлягають формуванню.
9. Спосіб згідно з п. 8, який відрізняється тим, що записаний у запам'ятовуючому пристрої маршрут при проходженні транспортного засобу, для якого сформовано цей маршрут, за допомогою процесу контролю розформовують шляхом поелементного звільнення відповідних елементів.
10. Пристрій для здійснення способу згідно з п. 1 для управління і контролю залізничної станції, що містить виконавчі і контрольні елементи, з використанням яких можуть бути сформовані щонайменше два маршрути для залізничних транспортних засобів за допомогою процесу управління, який на вимогу формування маршруту всупереч іншим вимогам на формування інших маршрутів і умов блокує, а потім переводить всі задіяні в цьому маршруті виконавчі елементи в потрібні положення, який відрізняється тим, що кожна зміна положення чи стану виконавчих елементів, пропонована процесом управління, здійснюється лише після успішної перевірки на прийнятність процесом контролю, незалежним від процесу управління, а також тим, що процес управління і незалежний від нього процес контролю реалізовані програмним забезпеченням, записаним в паралельно чи окремо працюючих комп'ютерах або лише в одному єдиному комп'ютері.
11. Пристрій згідно з п. 10, який відрізняється тим, що процес управління реалізовано за принципом плану колій станції, а процес контролю реалізовано за принципом таблиці залежності стрілок і сигналів або процес управління реалізовано за принципом таблиці залежності стрілок і сигналів, а процес контролю реалізовано за принципом плану колій станції.
12. Пристрій згідно з п. 10 або 11, який відрізняється тим, що процес управління реалізовано на управляючому комп'ютері (УК1), а процес контролю реалізовано на контрольному комп'ютері (КК2).
13. Пристрій згідно з п. 12, який відрізняється тим, що управляючий комп'ютер (УК1) містить запам'ятовуючий пристрій, призначений для зберігання даних таблиці залежності стрілок і сигналів, а також тим, що контрольний комп'ютер (КК2) містить запам'ятовуючий пристрій, призначений для зберігання даних сформованих маршрутів і переважно для зберігання плану колій контрольованої ділянки залізничної мережі, або тим, що контрольний комп'ютер (КК2) містить запам'ятовуючий пристрій, призначений для зберігання даних таблиці залежності стрілок і сигналів, а також тим, що управляючий комп'ютер (УК1) містить запам'ятовуючий пристрій, призначений для зберігання даних маршрутів і переважно також для зберігання плану колій контрольованої ділянки залізничної мережі.
Текст
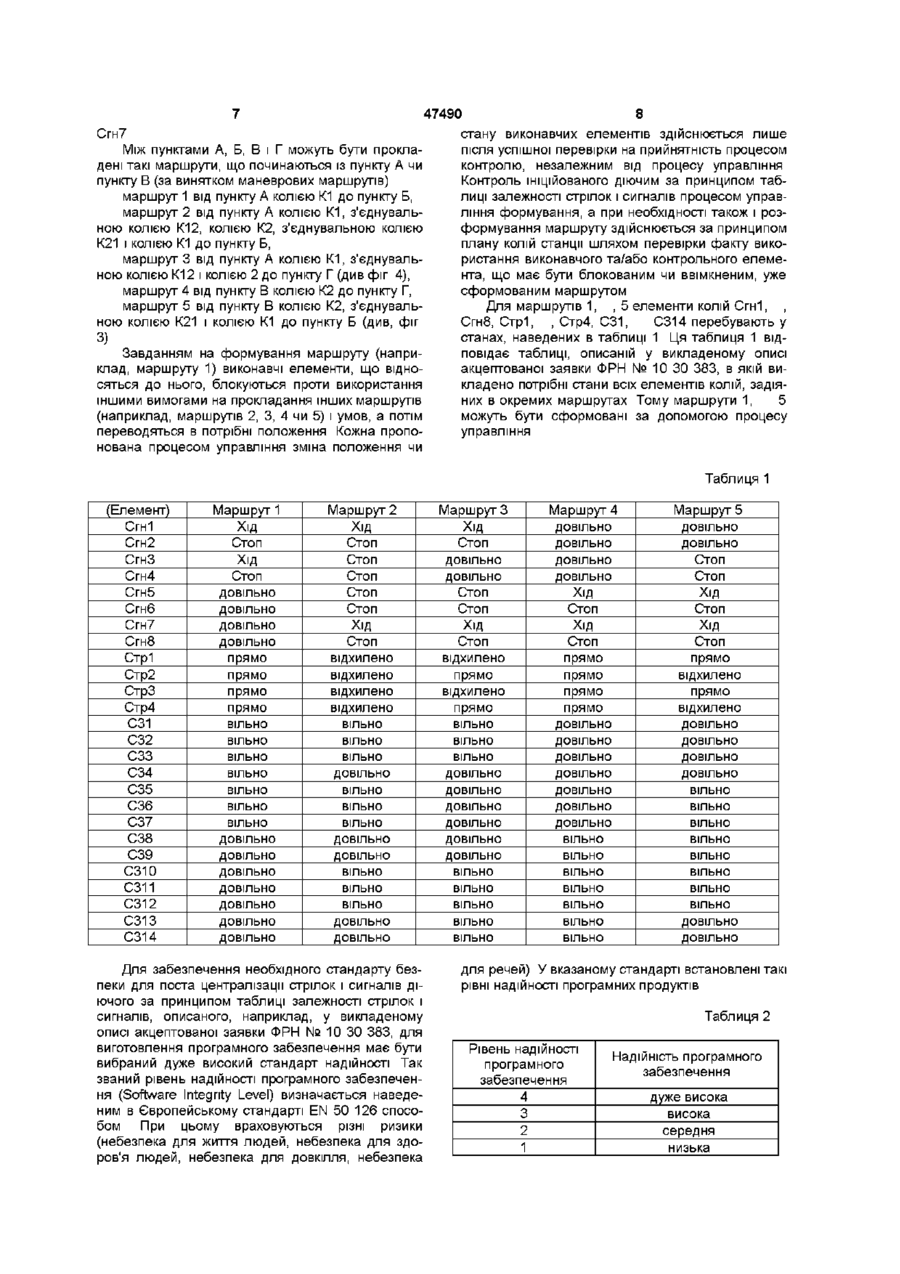
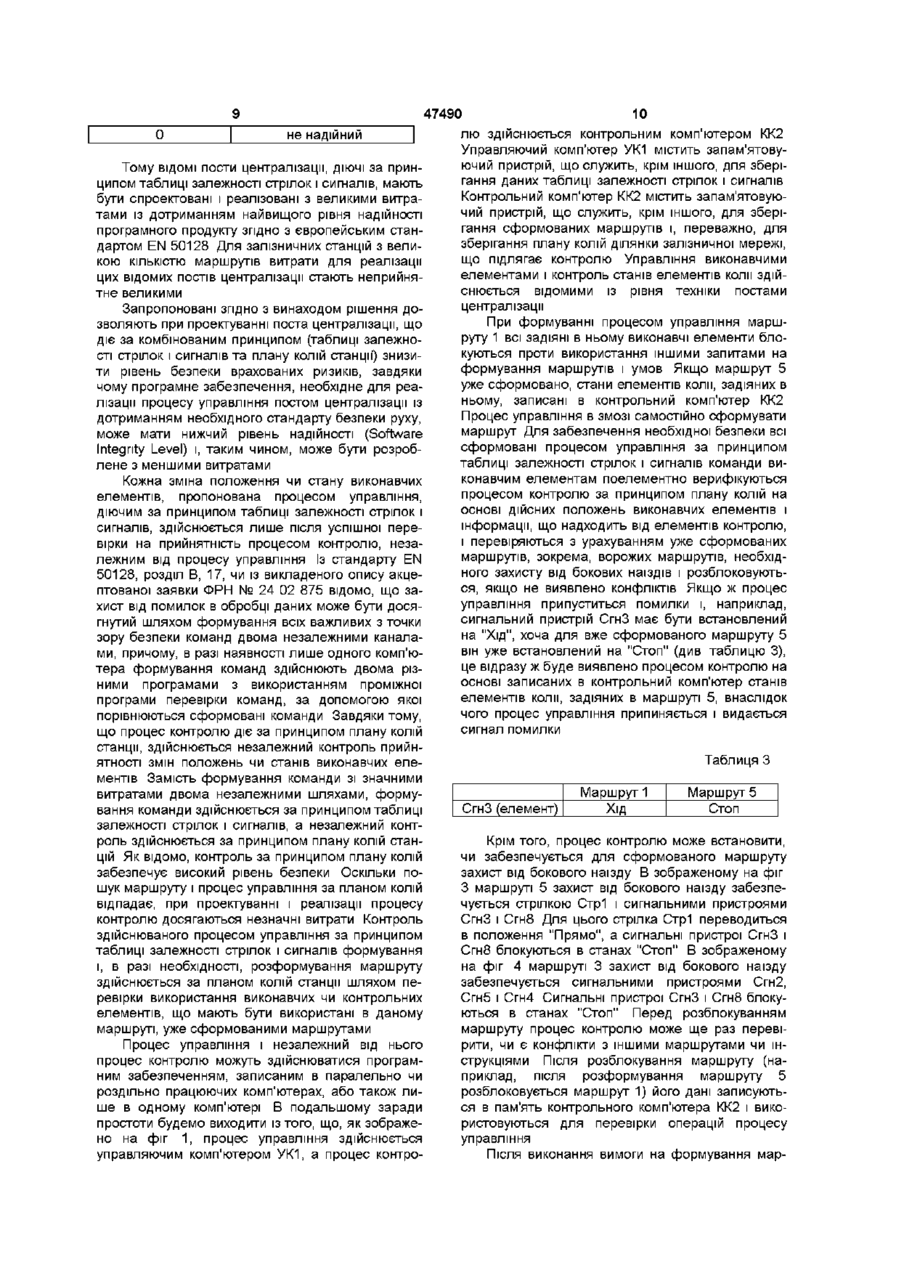
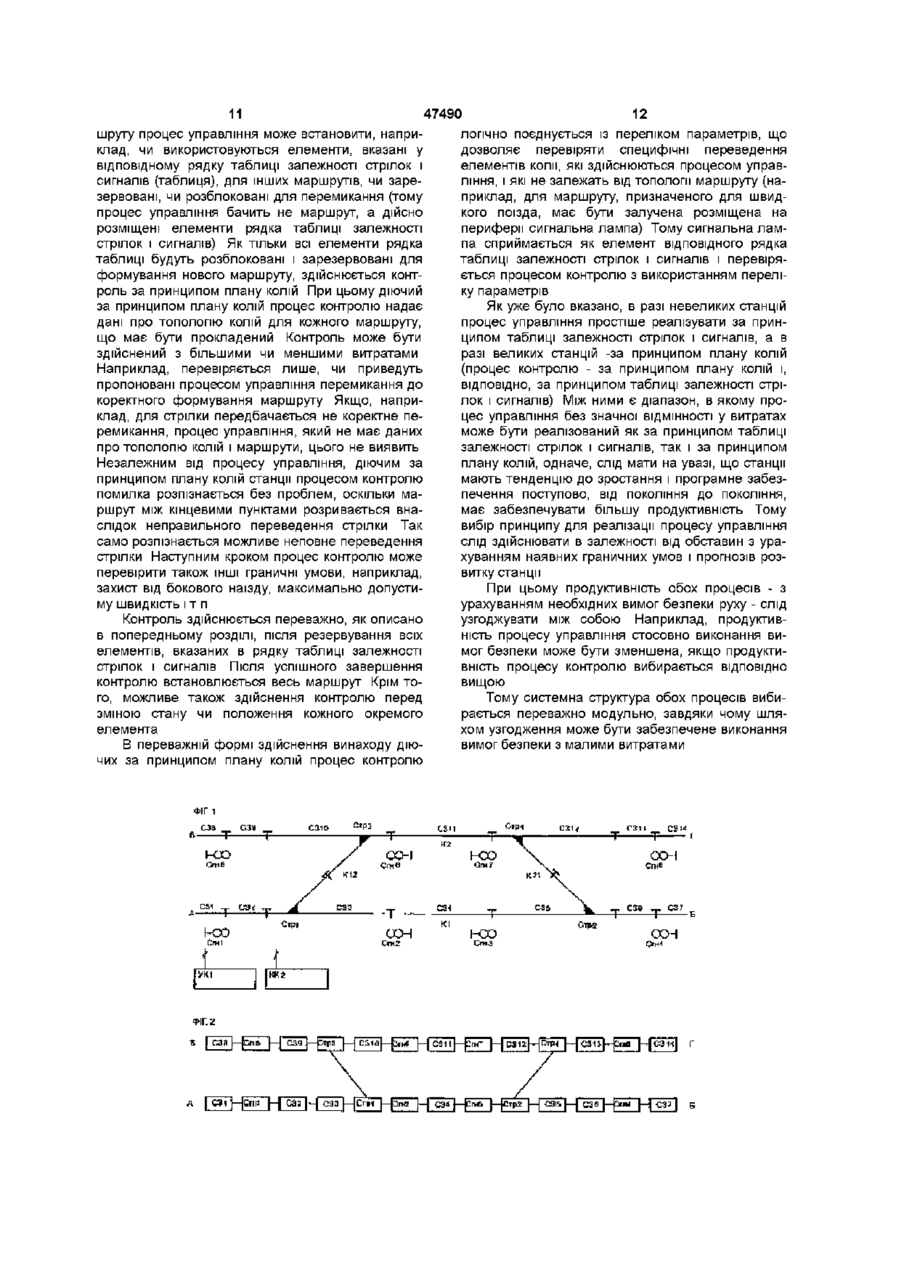
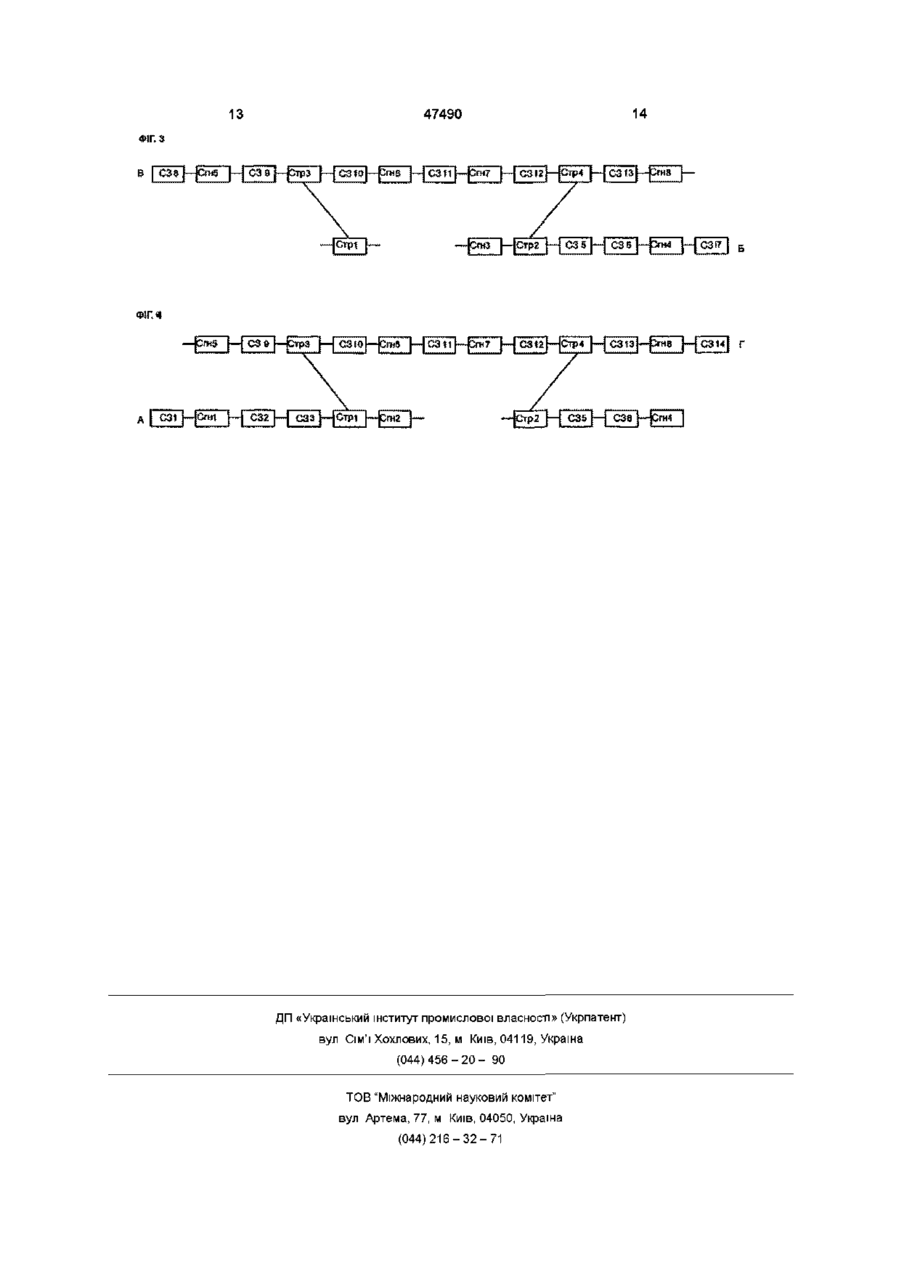
1 Спосіб управління і контролю залізничної станції, яка містить виконавчі і контрольні елементи і через яку можуть бути прокладені щонайменше два маршрути для залізничних транспортних засобів за допомогою процесу управління, який на вимогу формування маршруту всупереч іншим вимогам на формування інших маршрутів і умов блокує, а потім переводить всі задіяні в цьому маршруті виконавчі елементи в потрібні положення, який відрізняється тим, що кожну зміну положення чи стану виконавчих елементів, пропоновану процесом управління, здійснюють лише після успішної перевірки на прийнятність процесом контролю, незалежним від процесу управління, шляхом перевірки факту використання виконавчого та/або контрольного елемента, що має бути блокованим чи переведеним при формуванні, а за необхідністю також і розформуванні маршруту, уже сформованим маршрутом 2 Спосіб згідно з п 1, який відрізняється тим, що процес управління побудований за принципом плану колій станції, а процес контролю побудований за принципом таблиці залежності стрілок і сигналів або процес управління побудований за принципом таблиці залежності стрілок і сигналів, а процес контролю побудований за принципом плану колій станції 3 Спосіб згідно з п 1 або 2, який відрізняється тим, що контроль здійснюють після загального блокування всіх виконавчих елементів або після блокуванням і перед переведенням кожного окремого виконавчого елемента 4 Спосіб згідно з п 2 або 3, який відрізняється тим, що всі сформовані діючим за принципом таблиці залежності стрілок і сигналів процесом управ ління команди поелементно верифікують в процесі контролю за принципом плану колій на основі дійсних положень виконавчих елементів та інформації, одержаної від контрольних елементів, із урахуванням встановлених критеріїв, зокрема, маршрутів, що підлягають формуванню, можливих конфліктів з уже сформованими маршрутами та/або необхідного захисту від бокових наїздів, і розблоковують в разі відсутності конфліктів 5 Спосіб згідно з п 4, який відрізняється тим, що при здійсненні діючого за принципом плану колій станції процесу контролю використовують перелік параметрів, який служить для контролю змін положень елементів, безпосередньо не використовуваних в маршруті, що підлягає формуванню 6 Спосіб згідно з одним із попередніх пунктів, який відрізняється тим, що поелементну верифікацію в процесі контролю здійснюють згідно з правилами безпеки руху на залізниці 7 Спосіб згідно з одним із попередніх пунктів, який відрізняється тим, що з використанням процесу управління контролюють проходження транспортного засобу маршрутом і розблоковують виконавчі елементи для розформування маршруту 8 Спосіб згідно з одним із пунктів 2-7, який відрізняється тим, що дані розблокованого процесом контролю маршруту записують в контрольований процесом контролю запам'ятовуючий пристрій, що містить дані вже сформованих маршрутів, і використовують для контролю інших маршрутів, що підлягають формуванню 9 Спосіб згідно з п 8, який відрізняється тим, що записаний у запам'ятовуючому пристрої маршрут при проходженні транспортного засобу, для якого сформовано цей маршрут, за допомогою процесу контролю розформовують шляхом поелементного звільнення ВІДПОВІДНИХ елементів 10 Пристрій для здійснення способу згідно з п 1 для управління і контролю залізничної станції, що містить виконавчі і контрольні елементи, з використанням яких можуть бути сформовані щонайменше два маршрути для залізничних транспортних засобів за допомогою процесу управління, який на вимогу формування маршруту всупереч іншим вимогам на формування інших маршрутів і умов блокує, а потім переводить всі задіяні в цьому маршруті виконавчі елементи в потрібні положення, який відрізняється тим, що кожна зміна положен О о 47490 ня чи стану виконавчих елементів, пропонована процесом управління, здійснюється лише після успішної перевірки на прийнятність процесом контролю, незалежним від процесу управління, а також тим, що процес управління і незалежний від нього процес контролю реалізовані програмним забезпеченням, записаним в паралельно чи окремо працюючих комп'ютерах або лише в одному єдиному комп'ютері 11 Пристрій згідно з п 10, який відрізняється тим, що процес управління реалізовано за принципом плану колій станції, а процес контролю реалізовано за принципом таблиці залежності стрілок і сигналів або процес управління реалізовано за принципом таблиці залежності стрілок і сигналів, а процес контролю реалізовано за принципом плану колій станції 12 Пристрій згідно з п 10 або 11, який відрізняється тим, що процес управління реалізовано на управляючому комп'ютері (УК1), а процес контролю реалізовано на контрольному комп'ютері (КК2) 13 Пристрій згідно з п 12, який відрізняється тим, що управляючий комп'ютер (УК1) містить запам'ятовуючий пристрій, призначений для зберігання даних таблиці залежності стрілок і сигналів, а також тим, що контрольний комп'ютер (КК2) містить запам'ятовуючий пристрій, призначений для зберігання даних сформованих маршрутів і переважно для зберігання плану колій контрольованої ділянки залізничної мережі, або тим, що контрольний комп'ютер (КК2) містить запам'ятовуючий пристрій, призначений для зберігання даних таблиці залежності стрілок і сигналів, а також тим, що управляючий комп'ютер (УК1) містить запам'ятовуючий пристрій, призначений для зберігання даних маршрутів і переважно також для зберігання плану колій контрольованої ділянки залізничної мережі Винахід стосується способу і пристрою згідно з обмежувальною частиною п 1 чи п 10 формули винаходу Для прокладання маршрутів у постах централізації залізничного сполучення застосовують різні способи Електронні пости централізації, що працюють за принципом таблиці залежності стрілок і сигналів, містять запам'ятовуючий пристрій (ЗП), в якому записані всі можливі маршрути В описі до акцептованої заявки ФРН № 10 ЗО 383 (див також опис до патенту ФРН № 35 35 785 С2, колонка 4, рядки 38 - 47) описаний пост централізації, в якому задані навантаження всіх елементів, задіяних в окремих маршрутах, закладені в таблицю, записану в ЗП Із відмінностей між заданими і істинними навантаженнями вираховують команди для окремих елементів маршруту Одначе, це вимагає значних витрат на ЗП, які суттєво збільшуються при збільшенні обсягу станції, що підлягає управлінню В разі великої залізничної станції в залежності від обставин можуть знадобитись більш, ніж 50 000 комбінацій "старт/ціль" При цьому мусить забезпечуватись коректний вибір і запам'ятовування всіх даних встановлюваного маршруту з метою досягнення необхідної безпеки ФРН № 35 35 785 С2 способі для елементів коли, розміщених поблизу протишерстних стрілок, записана групова інформація ЦІЛІ, завдяки якій спрощується пошук маршруту Однак, коректне визначення і децентралізоване зберігання інформації у Одначе, в даний час для забезпечення максимально можливої безпеки застосовується маршрутна централізація, побудована за планом колій станції, описана, наприклад, в патенті ФРН № 32 32 308 В ній в рамках пошуку маршруту слова даних від маркованих стартом і ціллю обчислювальних пристроїв вводяться у взаємозв'язану обчислювальну систему, побудовану за планом колій станції, причому для дуже великої КІЛЬКОСТІ стрілок записуються слова даних, які більшою частиною пізніше не використовуються Не потрібне записування і стирання слів даних в таких електронних постах централізації веде до "надлишкових" процедур обробки даних, які в разі складних залізничних станцій набувають неприйнятних більше обсягів Для зменшення витрат у відомому із патенту ВІДПОВІДНИХ ЗП обумовлює ВІДПОВІДНІ витрати Спрощення контролю залізничної станції, керованої електронним постом централізації, працюючим за принципом плану колій станції, описане в патенті ФРН № 43 20 574 А1 В цій централізації одиничні команди управління присвоюються одночасно кільком елементам коли з метою спільної їх активізації стосовно сигналізації зайнятості і розмикання Завдяки цьому, уникаються порушення в роботі, що інакше можуть ставатися внаслідок короткочасно виникаючих різних режимів роботи окремих елементів коли Одначе, і це вигідне рішення не в змозі значно спростити електронний пост централізації Крім того, суттєвого значення надається дотриманню необхідного стандарту безпеки В описі до патенту ФРН № 32 32 308 шляхом передачі і порівняння антивалентних слів даних виявляються можливі виходи із ладу елементів, що можуть призвести до зміни передавання даних Одначе, це веде до додаткових витрат, не забезпечуючи всеохоплюючого контролю безпеки Із викладеного опису до акцептованої заявки ФРН № 2402875 відомо, що захист від помилок в обробці даних може бути досягнутий шляхом обробки всіх важливих з точки зору безпеки команд із практично подвійними витратами двома незалежними канапами, причому, при роботі з лише одним комп'ютером подвійна обробка команд здійснюється двома різними програмами і проміжною програмою контролю команд, за допомогою якої вироблені команди порівнюються Крім того, в європейському патенті № 0 683 082 А1 описано пристрій, за допомогою якого оператор системи управління значною мірою звільнений від задач контролю При цьому уже встановлені комбінації положень комутаційних елементів 47490 зчитуються з пристрою індикації і перевіряються на сумісність за допомогою записаних в пристрої обробки даних логічних правил Ці правила мають бути розроблені і перевірені на коректність при проектуванні поста централізації Тому для забезпечення всеохоплюючої безпеки зі значними витратами мають бути передбачені бездоганні ЛОГІЧНІ правила для всіх можливих комбінацій положень комутаційних елементів Тому в основу даного винаходу покладено задачу розробки способу управління і контролю залізничної станції, що містить виконавчі і контрольні елементи, за допомогою якого з урахуванням високих вимог безпеки з невеликими витратами можуть бути прокладені щонайменше два маршрути для залізничного транспортного засобу Крім того, має бути розроблений діючий згідно з винайденим способом пристрій для управління залізничною станцією, який може бути спроектований з незначними витратами і забезпечує високий стандарт безпеки Ця задача вирішена шляхом здійснення ознак відмітної частини пунктів 1 і 8 формули винаходу, ВИГІДНІ вдосконалення винаходу наведені в додаткових пунктах формули винаходу Спосіб згідно з винаходом дозволяє простим чином здійснювати проектування залізничних станцій, зокрема, електронних постів централізації на залізничному транспорті Завдяки застосуванню двох незалежних один від іншого способів управління і контролю, одночасно досягаються незначні витрати на проектування системи управління, а також підвищена безпека руху На вимогу прокладання маршруту всі виконавчі елементи, що відносяться до цього маршруту, процесом управління блокуються проти використання іншими вимогами на прокладання інших маршрутів і умов, а потім переводяться в потрібні положення, причому, кожна зміна положення чи стану виконавчих елементів, пропонована процесом управління, здійснюється лише після успішної перевірки на прийнятність процесом контролю, незалежним від процесу управління Тому процес управління може бути реалізований з незначними витратами, оскільки забезпечення безпеки здійснюється процесом контролю, незалежним від процесу управління, на основі відокремленого контролю прийнятності змін положення чи стану виконавчих елементів Процес управління організований переважно за принципом таблиці залежності стрілок і сигналів Контроль ініційованого діючим за принципом таблиці залежності стрілок і сигналів процесом управління формування, а при необхідності також і розформування маршруту здійснюється в цьому разі за принципом плану колій станції шляхом перевірки факту використання виконавчого та/або контрольного елемента, що має бути блокованим чи переведеним, уже сформованим маршрутом Діючий за принципом таблиці залежності стрілок і сигналів процес управління може бути розроблений просто - шляхом складання таблиці, в яку занесені положення і стани виконавчих елементів, використовуваних в окремих маршрутах Тому маршрути можуть бути сформовані просто, завдяки чому відпадає необхідність у трудомісткому пошуку маршруту за принципом плану колій станції, пов'язаному з описаними вище проблемами Одначе, процес перевірки положень і станів, передбачених для виконавчих елементів процесом управління, здійснюється переважно за принципом плану колій станції, в якому враховуються всі положення і стани виконавчих елементів, блокованих для інших маршрутів Таким чином, положення і стани виконавчих елементів, які мають бути використані при формуванні маршруту, перевіряються не за допомогою великої КІЛЬКОСТІ попередньо заданих логічних правил, а за допомогою дійсного стану всієї станції Завдяки такому всеохоплюючому контролю досягається підвищена безпека руху Крім того, контроль за принципом плану колій здійснюється з незначними витратами, оскільки відпадає необхідність у пов'язаному зі значними витратами коректному і повному складанні правил контролю для формування маршруту Зокрема, з використанням сучасної техніки управління можлива також реалізація процесу управління зі зменшеними витратами за принципом плану колій станції В такому разі для забезпечення необхідної безпеки незалежний від процесу управління процес контролю реалізують за принципом таблиці залежності стрілок і сигналів Тому рішення згідно з винаходом дозволяють з найменшими витратами реалізувати базовану на двох незалежних один від іншого процесах систему управління, узгоджену з топологією колій і з необхідним рівнем безпеки Процес управління в разі невеликих станцій реалізується переважно за принципом таблиці залежності стрілок і сигналів, а в разі більших станцій -за принципом плану колій станції Реалізація процесу управління не потребує значних витрат, оскільки необхідна безпека руху може бути забезпечена простіше - шляхом застосування процесу контролю, незалежного від процесу управління Нижче винахід пояснюється детальніше з використанням ілюстрацій На них зображено фіг 1 залізнична станція з двома паралельними коліями, що можуть бути сполучені між собою двома з'єднувальними коліями з парою стрілок в кожній, фіг 2 план колій станції згідно з фіг 1, фіг 3 план колій сформованого маршруту від пункту В до пункту Б, фіг 4 план колій сформованого маршруту від пункту А до пункту Г На фіг 1 зображено залізничну станцію з двома паралельно прокладеними від пункту А до пункту Б і від пункту В до пункту Г коліями К1, К2, які можуть бути сполучені між собою двома з'єднувальними коліями К12, К21 за допомогою пар стрілок Стр1, СтрЗ або Стр4, Стр2 Коли К1, К2 розділені на різні ділянки, контрольовані сигналізаторами зайнятості С31, , С314 Ділянки колій навколо стрілок Стр1, , Стр4 до середини з'єднувальних колій К12, К21 контролюються сигналізаторами зайнятості СЗЗ, С35, С310 і С312 На контрольованих сигналізаторами зайнятості С31, С37, С38 і С314 ділянках розміщені сигнальні пристрої Сгн1, Сгн4, Сгн5 і Сгн8 На ділянках, контрольованих сигналізаторами зайнятості С34 і С311, розміщені сигнальні пристрої Сгн2, СгнЗ і, ВІДПОВІДНО, Сгнб, 47490 Сгн7 Між пунктами А, Б, В і Г можуть бути прокладені такі маршрути, що починаються із пункту А чи пункту В (за винятком маневрових маршрутів) маршрут 1 від пункту А колією К1 до пункту Б, маршрут 2 від пункту А колією К1, з'єднувальною колією К12, колією К2, з'єднувальною колією К21 і колією К1 до пункту Б, маршрут 3 від пункту А колією К1, з'єднувальною колією К12 і колією 2 до пункту Г (див фіг 4), маршрут 4 від пункту В колією К2 до пункту Г, маршрут 5 від пункту В колією К2, з'єднувальною колією К21 і колією К1 до пункту Б (див, фіг 3) Завданням на формування маршруту (наприклад, маршруту 1) виконавчі елементи, що відносяться до нього, блокуються проти використання іншими вимогами на прокладання інших маршрутів (наприклад, маршрутів 2, 3, 4 чи 5) і умов, а потім переводяться в потрібні положення Кожна пропонована процесом управління зміна положення чи 8 стану виконавчих елементів здійснюється лише після успішної перевірки на прийнятність процесом контролю, незалежним від процесу управління Контроль ініційованого діючим за принципом таблиці залежності стрілок і сигналів процесом управління формування, а при необхідності також і розформування маршруту здійснюється за принципом плану колій станції шляхом перевірки факту використання виконавчого та/або контрольного елемента, що має бути блокованим чи ввімкненим, уже сформованим маршрутом Для маршрутів 1, , 5 елементи колій Сгн1, Сгн8, Стр1, , Стр4, С31, С314 перебувають у станах, наведених в таблиці 1 Ця таблиця 1 відповідає таблиці, описаній у викладеному описі акцептованої заявки ФРН № 10 ЗО 383, в якій викладено потрібні стани всіх елементів колій, задіяних в окремих маршрутах Тому маршрути 1, 5 можуть бути сформовані за допомогою процесу управління Таблиця 1 (Елемент) Сгн1 Сгн2 СгнЗ Сгн4 Сгн5 Сгнб Сгн7 Сгн8 Стр1 Стр2 СтрЗ Стр4 Маршрут 1 Маршрут 2 Маршрут 3 Маршрут 4 Маршрут 5 Хід Хід Хід ДОВІЛЬНО ДОВІЛЬНО Стоп Стоп Стоп Стоп Стоп Стоп Стоп ДОВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО Стоп Стоп Стоп Стоп Хід Хід Стоп Стоп С31 С32 СЗЗ С34 С35 С36 С37 С38 С39 С310 С311 С312 С313 С314 Хід Стоп ДОВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО Хід Хід Хід Хід ДОВІЛЬНО прямо прямо прямо прямо Стоп відхилено відхилено відхилено відхилено Стоп відхилено прямо відхилено прямо Стоп прямо прямо прямо прямо Стоп прямо відхилено прямо відхилено ВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ДОВІЛЬНО ВІЛЬНО ВІЛЬНО ДОВІЛЬНО Для забезпечення необхідного стандарту безпеки для поста централізації стрілок і сигналів діючого за принципом таблиці залежності стрілок і сигналів, описаного, наприклад, у викладеному описі акцептованої заявки ФРН № 10 ЗО 383, для виготовлення програмного забезпечення має бути вибраний дуже високий стандарт надійності Так званий рівень надійності програмного забезпечення (Software Integrity Level) визначається наведеним в Європейському стандарті EN 50 126 способом При цьому враховуються різні ризики (небезпека для життя людей, небезпека для здоров'я людей, небезпека для довкілля, небезпека для речей) У вказаному стандарті встановлені такі рівні надійності програмних продуктів Таблиця 2 Рівень надійності програмного забезпечення Надійність програмного забезпечення 4 3 2 1 дуже висока висока середня низька 47490 10 лю здійснюється контрольним комп'ютером КК2 0 не надійний Управляючий комп'ютер УК1 містить запам'ятовуючий пристрій, що служить, крім іншого, для зберіТому ВІДОМІ пости централізації, ДІЮЧІ за прингання даних таблиці залежності стрілок і сигналів ципом таблиці залежності стрілок і сигналів, мають Контрольний комп'ютер КК2 містить запам'ятовуюбути спроектовані і реалізовані з великими витрачий пристрій, що служить, крім іншого, для зберітами із дотриманням найвищого рівня надійності гання сформованих маршрутів і, переважно, для програмного продукту згідно з європейським станзберігання плану колій ділянки залізничної мережі, дартом EN 50128 Для залізничних станцій з велищо підлягає контролю Управління виконавчими кою КІЛЬКІСТЮ маршрутів витрати для реалізації елементами і контроль станів елементів коли здійцих відомих постів централізації стають неприйняснюється відомими із рівня техніки постами тне великими централізації Запропоновані згідно з винаходом рішення доПри формуванні процесом управління маршзволяють при проектуванні поста централізації, що руту 1 всі задіяні в ньому виконавчі елементи блодіє за комбінованим принципом (таблиці залежнокуються проти використання іншими запитами на сті стрілок і сигналів та плану колій станції) знизиформування маршрутів і умов Якщо маршрут 5 ти рівень безпеки врахованих ризиків, завдяки уже сформовано, стани елементів коли, задіяних в чому програмне забезпечення, необхідне для реаньому, записані в контрольний комп'ютер КК2 лізації процесу управління постом централізації із Процес управління в змозі самостійно сформувати дотриманням необхідного стандарту безпеки руху, маршрут Для забезпечення необхідної безпеки всі може мати нижчий рівень надійності (Software сформовані процесом управління за принципом Integrity Level) і, таким чином, може бути розробтаблиці залежності стрілок і сигналів команди вилене з меншими витратами конавчим елементам поелементно верифікуються Кожна зміна положення чи стану виконавчих процесом контролю за принципом плану колій на елементів, пропонована процесом управління, основі дійсних положень виконавчих елементів і діючим за принципом таблиці залежності стрілок і інформації, що надходить від елементів контролю, сигналів, здійснюється лише після успішної переі перевіряються з урахуванням уже сформованих вірки на прийнятність процесом контролю, незамаршрутів, зокрема, ворожих маршрутів, необхідлежним від процесу управління Із стандарту EN ного захисту від бокових наїздів і розблоковують50128, розділ В, 17, чи із викладеного опису акцеся, якщо не виявлено конфліктів Якщо ж процес птованої заявки ФРН № 24 02 875 відомо, що зауправління припуститься помилки і, наприклад, хист від помилок в обробці даних може бути досясигнальний пристрій СгнЗ має бути встановлений гнутий шляхом формування всіх важливих з точки на "Хід", хоча для вже сформованого маршруту 5 зору безпеки команд двома незалежними каналавін уже встановлений на "Стоп" (див таблицю 3), ми, причому, в разі наявності лише одного комп'юце відразу ж буде виявлено процесом контролю на тера формування команд здійснюють двома різоснові записаних в контрольний комп'ютер станів ними програмами з використанням проміжної елементів коли, задіяних в маршруті 5, внаслідок програми перевірки команд, за допомогою якої чого процес управління припиняється і видається порівнюються сформовані команди Завдяки тому, сигнал помилки що процес контролю діє за принципом плану колій станції, здійснюється незалежний контроль прийнятності змін положень чи станів виконавчих елементів Замість формування команди зі значними витратами двома незалежними шляхами, формування команди здійснюється за принципом таблиці залежності стрілок і сигналів, а незалежний контроль здійснюється за принципом плану колій станцій Як відомо, контроль за принципом плану колій забезпечує високий рівень безпеки Оскільки пошук маршруту і процес управління за планом колій відпадає, при проектуванні і реалізації процесу контролю досягаються незначні витрати Контроль здійснюваного процесом управління за принципом таблиці залежності стрілок і сигналів формування і, в разі необхідності, розформування маршруту здійснюється за планом колій станції шляхом перевірки використання виконавчих чи контрольних елементів, що мають бути використані в даному маршруті, уже сформованими маршрутами Процес управління і незалежний від нього процес контролю можуть здійснюватися програмним забезпеченням, записаним в паралельно чи роздільно працюючих комп'ютерах, або також лише в одному комп'ютері В подальшому заради простоти будемо виходити із того, що, як зображено на фіг 1, процес управління здійснюється управляючим комп'ютером УК1, а процес контро Таблиця З Маршрут 1 СгнЗ (елемент) Хід Маршрут 5 Стоп Крім того, процес контролю може встановити, чи забезпечується для сформованого маршруту захист від бокового наїзду В зображеному на фіг З маршруті 5 захист від бокового наїзду забезпечується стрілкою Стр1 і сигнальними пристроями СгнЗ і Сгн8 Для цього стрілка Стр1 переводиться в положення "Прямо", а сигнальні пристрої СгнЗ і Сгн8 блокуються в станах "Стоп" В зображеному на фіг 4 маршруті 3 захист від бокового наїзду забезпечується сигнальними пристроями Сгн2, Сгн5 і Сгн4 Сигнальні пристрої СгнЗ і Сгн8 блокуються в станах "Стоп" Перед розблокуванням маршруту процес контролю може ще раз перевірити, чи є конфлікти з іншими маршрутами чи інструкціями Після розблокування маршруту (наприклад, після розформування маршруту 5 розблоковується маршрут 1) його дані записуються в пам'ять контрольного комп'ютера КК2 і використовуються для перевірки операцій процесу управління Після виконання вимоги на формування мар 11 47490 12 шруту процес управління може встановити, наприлогічно поєднується із переліком параметрів, що клад, чи використовуються елементи, вказані у дозволяє перевіряти специфічні переведення відповідному рядку таблиці залежності стрілок і елементів коли, які здійснюються процесом управсигналів (таблиця), для інших маршрутів, чи зареління, і які не залежать від топології маршруту (назервовані, чи розблоковані для перемикання (тому приклад, для маршруту, призначеного для швидпроцес управління бачить не маршрут, а дійсно кого поїзда, має бути залучена розміщена на розміщені елементи рядка таблиці залежності периферії сигнальна лампа) Тому сигнальна ламстрілок і сигналів) Як тільки всі елементи рядка па сприймається як елемент ВІДПОВІДНОГО рядка таблиці будуть розблоковані і зарезервовані для таблиці залежності стрілок і сигналів і перевіряформування нового маршруту, здійснюється контється процесом контролю з використанням переліроль за принципом плану колій При цьому діючий ку параметрів за принципом плану колій процес контролю надає Як уже було вказано, в разі невеликих станцій дані про топологію колій для кожного маршруту, процес управління простіше реалізувати за принщо має бути прокладений Контроль може бути ципом таблиці залежності стрілок і сигналів, а в здійснений з більшими чи меншими витратами разі великих станцій -за принципом плану колій Наприклад, перевіряється лише, чи приведуть (процес контролю - за принципом плану колій і, пропоновані процесом управління перемикання до ВІДПОВІДНО, за принципом таблиці залежності стрікоректного формування маршруту Якщо, наприлок і сигналів) Між НИМИ Є діапазон, в якому проклад, для стрілки передбачається не коректне пецес управління без значної ВІДМІННОСТІ у витратах ремикання, процес управління, який не має даних може бути реалізований як за принципом таблиці про топологію колій і маршрути, цього не виявить залежності стрілок і сигналів, так і за принципом Незалежним від процесу управління, діючим за плану колій, одначе, слід мати на увазі, що станції принципом плану колій станції процесом контролю мають тенденцію до зростання і програмне забезпомилка розпізнається без проблем, оскільки мапечення поступово, від покоління до покоління, ршрут між кінцевими пунктами розривається внамає забезпечувати більшу продуктивність Тому слідок неправильного переведення стрілки Так вибір принципу для реалізації процесу управління само розпізнається можливе неповне переведення слід здійснювати в залежності від обставин з урастрілки Наступним кроком процес контролю може хуванням наявних граничних умов і прогнозів розперевірити також ІНШІ граничні умови, наприклад, витку станції захист від бокового наїзду, максимально допустиПри цьому продуктивність обох процесів - з му швидкість і т п урахуванням необхідних вимог безпеки руху - слід узгоджувати між собою Наприклад, продуктивКонтроль здійснюється переважно, як описано ність процесу управління стосовно виконання вив попередньому розділі, після резервування всіх мог безпеки може бути зменшена, якщо продуктиелементів, вказаних в рядку таблиці залежності вність процесу контролю вибирається ВІДПОВІДНО стрілок і сигналів Після успішного завершення вищою контролю встановлюється весь маршрут Крім того, можливе також здійснення контролю перед Тому системна структура обох процесів вибизміною стану чи положення кожного окремого рається переважно модульно, завдяки чому шляелемента хом узгодження може бути забезпечене виконання вимог безпеки з малими витратами В переважній формі здійснення винаходу діючих за принципом плану колій процес контролю ОСИ СгнЯ —I ЬОО Стр.2 1 СОН ь 13 47490 14 ФІГ. з ФІГ.Ч СЗіОННСгнб Н Н 7 Н С312НСФ-І Н СЗІзН-Сгна Ц С З І Ч ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 Г
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and appliance for administration and control of a railway station
Назва патенту російськоюСпособ и устройство для управления и контроля железнодорожной станции
МПК / Мітки
МПК: B61L 19/00
Мітки: спосіб, залізничної, станції, пристрій, контролю, управління
Код посилання
<a href="https://ua.patents.su/7-47490-sposib-i-pristrijj-dlya-upravlinnya-i-kontrolyu-zaliznichno-stanci.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для управління і контролю залізничної станції</a>
Спосіб контролю систем управління ракет
Номер патенту: 31113
Опубліковано: 15.12.2000
Автори: Семенов Леонід Антонович, Кузьмін В'ячеслав Павлович, Косовенко Євген Вікторович, Доценко Борис Іванович
МПК: G05B 23/02
Мітки: ракет, контролю, систем, спосіб, управління
Формула / Реферат:
Спосіб контролю систем управління ракет, який полягає у дії керуючого сигналу на вхід контрольованої системи, імітації ракети, як об’єкта управління, визначенні як інформативного параметра промаху ракети, що відрізняється тим, що керуючий сигнал формують залежно від поточного відхилення ракети від заданих координат, а параметри ракети, як об'єкта управління, змінюють у часі згідно з заданим законом.
Спосіб управління тепловим навантаженням утилізаційної станції

Номер патенту: 13200
Опубліковано: 28.02.1997
Автори: Абрамович Юрій Костянтинович, Якобсон Михайло Якович, Вовк Вячеслав Михайлович, Лорінов Михайло Миронович
МПК: F22B 1/00
Мітки: спосіб, управління, тепловим, навантаженням, утилізаційної, станції
Формула / Реферат:
(57) Способ управления тепловой нагрузкой утилизационной станции, состоящей из последовательно включенных нагревательной печи, дымовода утилизационных газов и котла-утилизатора с подтопкой, включающий измерение параметров пара на выходе из котла-утилизатора и изменение подачи топлива на подтопку при отклонении параметров пара от заданных, отличающийся тем, что предварительно измеряют температуру утилизационных газов и при ее отклонении от...
Пристрій контролю зайнятості залізничної колії
Номер патенту: 21752
Опубліковано: 30.04.1998
Автор: Зайцев Вадим Сергійович
МПК: B61L 21/00
Мітки: колії, залізничної, контролю, зайнятості, пристрій
Формула / Реферат:
Устройство контроля занятости железнодорожного пути, содержащее точечные путевые датчики, по меньшей мере один анализатор направления движения, блок счета числа осей, блок сравнения, выходной блок и блок питания, отличающееся тем, что оно дополнительно содержит три логических элемента ИЛИ-НЕ, первый и второй счетчики, составляющие блок счета осей, два анализатора направления движения, при этом первые выходы анализаторов направления...
Спосіб безперервного контролю та управління рн і лужністю соків цукрового виробництва
Номер патенту: 40071
Опубліковано: 16.07.2001
Автори: Еременко Борис Антонович, Кравчук Анатолій Федорович
МПК: G01N 33/02
Мітки: соків, управління, спосіб, безперервного, контролю, виробництва, цукрового, лужністю
Формула / Реферат:
1. Спосіб безперервного контролю і управління рН і лужністю соків цукрового виробництва, що передбачає покроковий вимір поточних значень рНі при температурі 20°С, і визначення лужності соку за математичною залежністю, який відрізняється тим, що вимірюють поточне значення рНі соку, визначають титруванням лужність соку, порівнюють фактичну лужність з заданою, після чого подачею сатураційного газу доводять лужність соку до регламентної,...
Спосіб контролю рівня розплавленого матеріалу в печі і управління завантаженням шихти в піч та пристрій для його реалізації
Номер патенту: 14877
Опубліковано: 30.04.1999
Автор: Сікора Любомир Степанович
МПК: G01F 23/284, C03B 5/00
Мітки: розплавленого, шихти, матеріалу, рівня, печі, управління, завантаженням, пристрій, реалізації, піч, спосіб, контролю
Формула / Реферат:
1. Способ контроля уровня расплавленного материала в печи и управления загрузкой шихты в печь, включающий зондирование лазерным лучом контролируемой среды, прием отраженного от среды сигнала и распределение его по двум каналам в зависимости от положения луча по отношению к заданной линии уровня расплавленного материала посредством плоской двухкоординатной матрицы фотоприемника, преобразование его в электрический сигнал, усиление его и...
Попередній патент: Сувенірна упаковка для напоїв
Наступний патент: Спосіб наплавлення твердого зносостійкого покриття на металеву поверхню (варіанти) і суспензія для наплавлення
Випадковий патент: Чохол