Механізм повороту розпашних складених площин
Номер патенту: 49061
Опубліковано: 16.09.2002
Автори: Бак Галина Олександрівна, Федірко Юрій Ярославович, Бак Микола Несторович
Формула / Реферат
1. Механізм повороту розпашних складених площин, який містить в собі стійку, необхідну кількість площин, центральних коліс, сателітів, механізми фіксації площин, механізми повороту площин, притискачів, який відрізняється тим, що в розпашній брамі до вертикального боку площини, яка не з'єднана із стійкою, приєднана необхідна кількість площин, які є водилами особливих триланкових планетарних механізмів з відповідним передаточним числом в залежності від кута повороту наступної площини, де всі площини шарнірно з’єднані між собою послідовно одна за одною по ширині площин вертикально закріпленими петлями або спеціальними петлями, де частина півпетлі одночасно є центральним колесом або сателітом, або такими, де одна частина петлі є центральним колесом, а друга частина петлі - сателітом, де всі види шарнірних з’єднань розміщені з двох сторін товщини площин в шахматному порядку при виді зверху, в яких центральні колеса даної площини розміщені на осі, з’єднані нерухомо із попередньою площиною, розміщеною зі сторони стійки, а сателіти даної площини з’єднані нерухомо із наступною площиною, де всі центральні колеса і сателіти, які відносяться до своєї площини-водила, з’єднані між собою замість зубчатого зачеплення прямою або перехресною передачею гнучким зв’язком, яка не допускає пробуксовки, а для щільного прилягання площин в складеному стані всі гілки гнучких зв’язків, які сходять з виступаючих поверхонь центральних коліс і сателітів притиснуті притискачами до площин, механізм фіксації площин розміщений і закріплений на двох будь-яких шарнірно з’єднаних площинах або на стійці і шарнірно з’єднаний із нею площиною, де сам фіксатор розміщений на осі і з'єднаний нерухомо із одною площиною або стійкою, а електромагнітний стопор закріплений нерухомо на стійці або другій площині, в механізмі повороту площини одна із деталей механічної передачі розміщена на осі шарнірного з’єднання площини із стійкою і з’єднана нерухомо із площиною, а друга деталь даної механічної передачі з'єднана з валом приводу, який закріплений нерухомо відносно даної осі повороту, при великій кількості площин в даному механізмі внизу до площин закріплена потрібна кількість опорних поворотних роликів.
2. Механізм повороту розпашних складених площин по п. 1, який відрізняється тим, що привід закріплений нерухомо відносно осі повороту площини і стійки так, що вісь вала приводу збігається з даною віссю і вал приводу з'єднаний нерухомо із даною площиною.
3. Механізм повороту розпашних складених площин по п. 1, який відрізняється тим, що одна із деталей механічної передачі розміщена на осі повороту площини і стійки і з'єднана нерухомо із стійкою, а друга деталь даної механічної передачі з'єднана з валом приводу, який закріплений нерухомо на даній площині.
4. Механізм повороту розпашних складених площин по п. 1, який відрізняється тим, що привід закріплений нерухомо на площині, яка шарнірно з'єднана із стійкою так, що вісь вала приводу співпадає з віссю повороту площини і стійки і вал приводу з’єднаний нерухомо із стійкою.
5. Механізм повороту розпашних складених площин по п. 1, який відрізняється тим, що одна із деталей механічної передачі розміщена шарнірно на осі з’єднаних будь-яких двох площин і з’єднана з однією із них, а друга деталь даної передачі з’єднана з валом приводу, який закріплений на другій площині.
6. Механізм повороту розпашних складених площин по п. 1, який відрізняється тим, що привід закріплений нерухомо на будь-якій площині так, що вісь вала приводу співпадає з віссю шарнірного з’єднання даної і іншої площин, де вал приводу з’єднано нерухомо із цією іншою площиною.
Текст
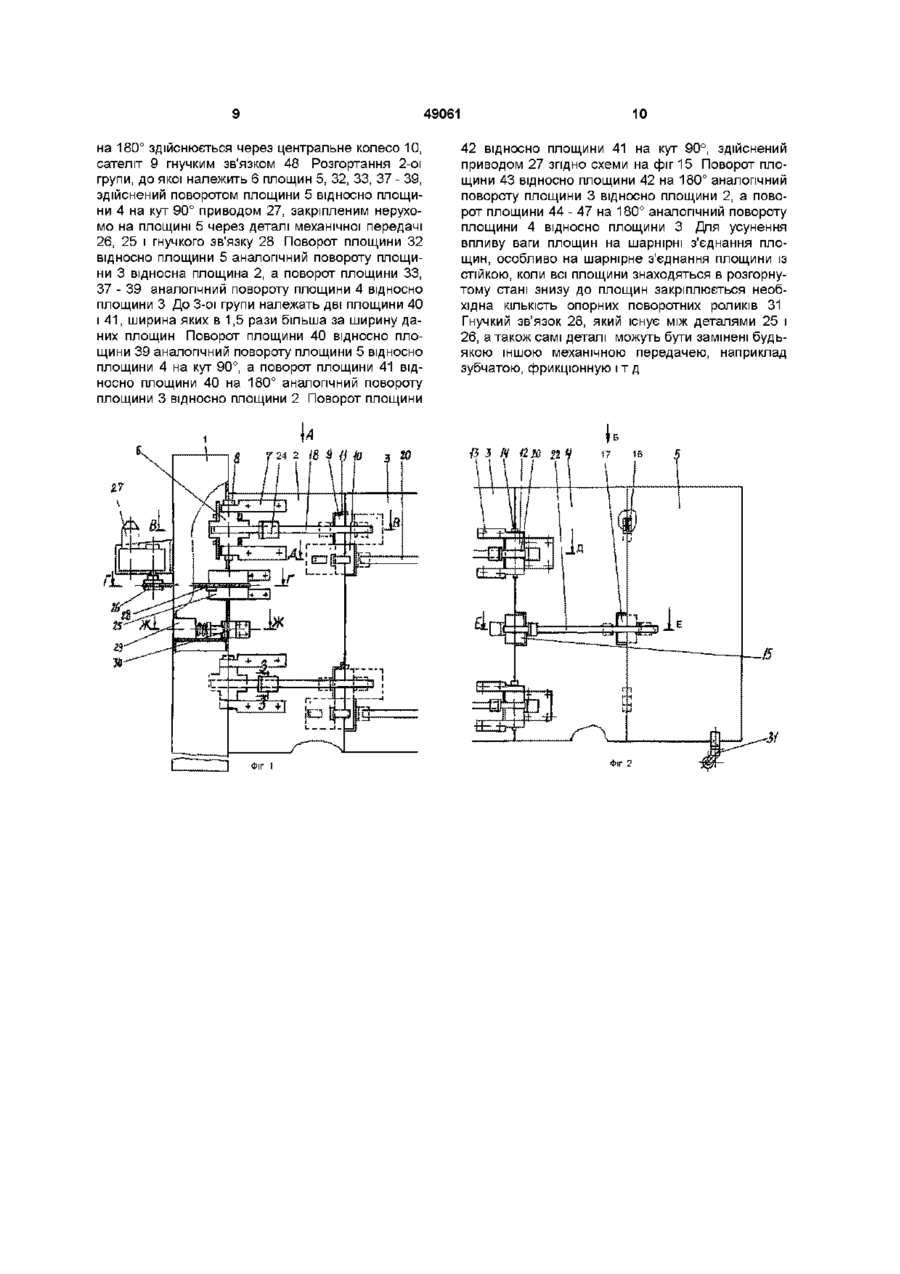
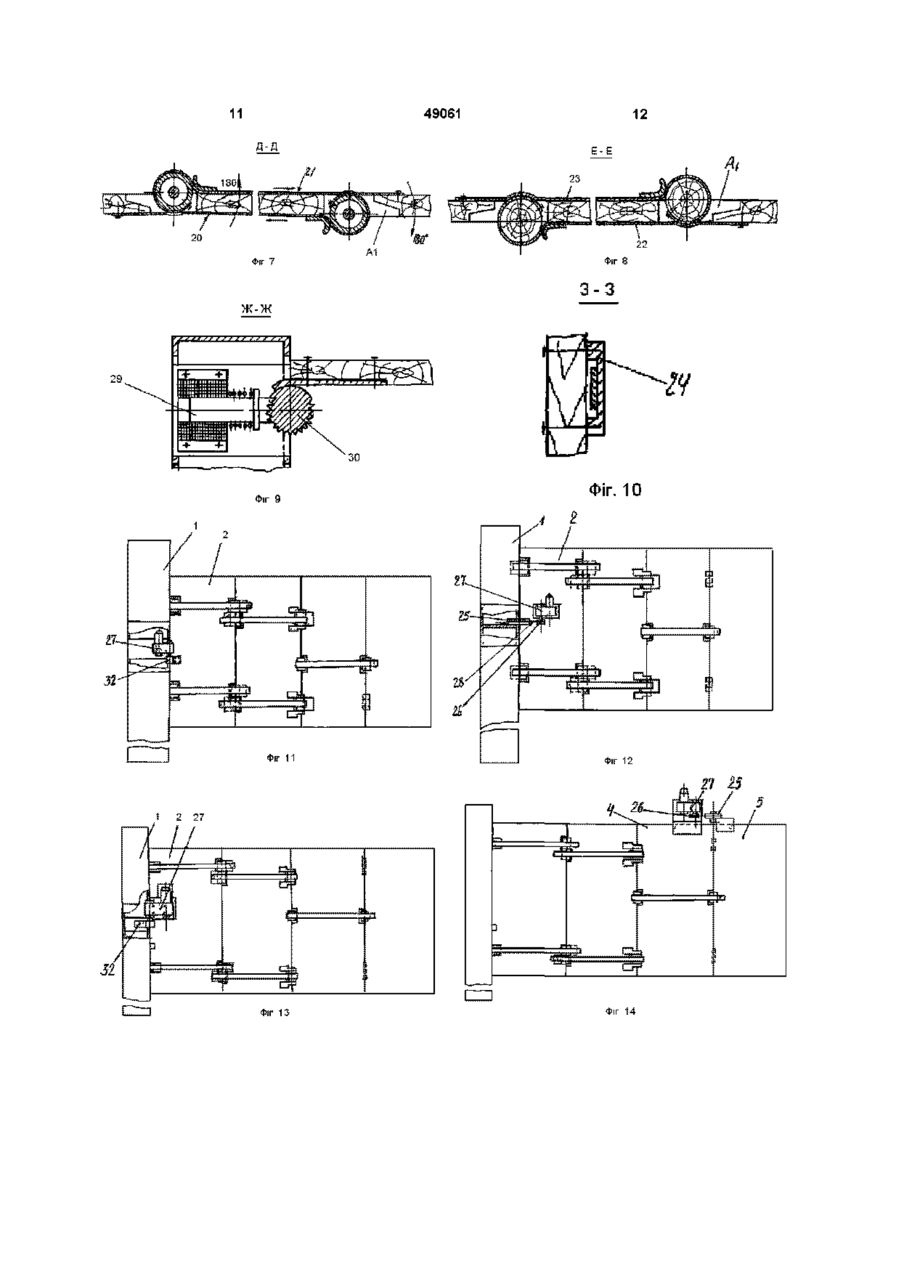
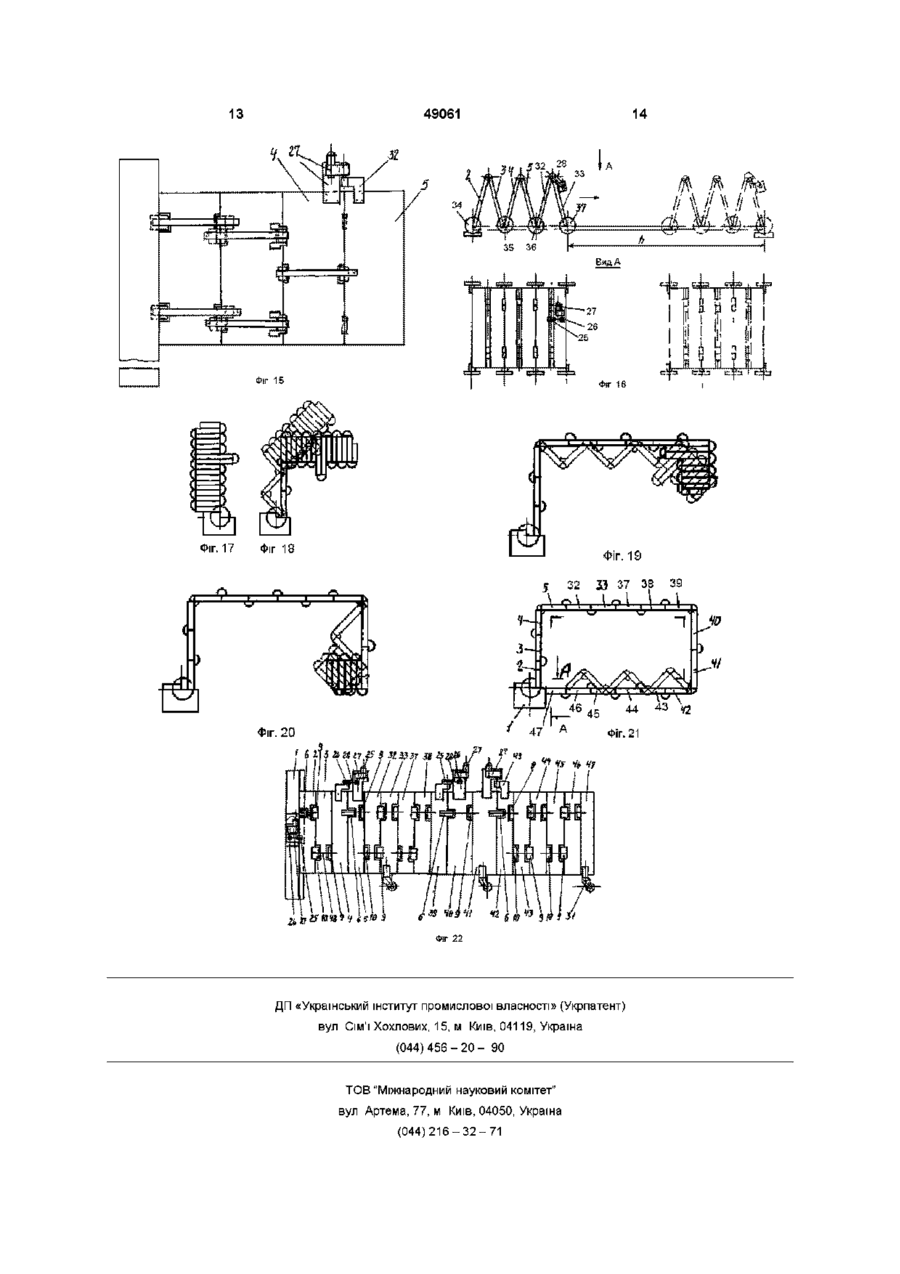
1 Механізм повороту розпашних складених площин, який містить в собі стійку, необхідну КІЛЬКІСТЬ площин, центральних коліс, сателітів, механізми фіксації площин, механізми повороту площин, притискачів, який відрізняється тим, що в розпашній брамі до вертикального боку площини, яка не з'єднана із стійкою, приєднана необхідна КІЛЬКІСТЬ площин, які є водилами особливих триланкових планетарних механізмів з ВІДПОВІДНИМ передаточним числом в залежності від кута повороту наступної площини, де всі площини шарнірно з'єднані між собою послідовно одна за одною по ширині площин вертикально закріпленими петлями або спеціальними петлями, де частина півпетлі одночасно є центральним колесом або сателітом, або такими, де одна частина петлі є центральним колесом, а друга частина петлі - сателітом, де всі види шарнірних з'єднань розміщені з двох сторін товщини площин в шахматному порядку при виді зверху, в яких центральні колеса даної площини розміщені на осі, з'єднані нерухомо із попередньою площиною, розміщеною зі сторони стійки, а сателіти даної площини з'єднані нерухомо із наступною площиною, де всі центральні колеса і сателіти, які відносяться до своєї площини-водила, з'єднані між собою замість зубчатого зачеплення прямою або перехресною передачею гнучким зв'язком, яка не допускає пробуксовки, а для щільного прилягання площин в складеному стані всі гілки гнучких зв'язків, ЯКІ СХОДЯТЬ З виступаючих поверхонь центральних коліс і сателітів притиснуті притискачами до площин, механізм фіксації площин розміщений і закріплений на двох будь-яких шарнірно з'єднаних площинах або на СТІЙЦІ І шарнірно з'єднаний із нею площиною, де сам фіксатор розміщений на осі і з єднаний нерухомо із одною площиною або стійкою, а електромагнітний стопор закріплений нерухомо на СТІЙЦІ або другій площині, в механізмі повороту площини одна із деталей механічної передачі розміщена на осі шарнірного з'єднання площини із стійкою і з'єднана нерухомо із площиною, а друга деталь даної механічної передачі з'єднана з валом приводу, який закріплений нерухомо відносно даної осі повороту, при великій КІЛЬКОСТІ площин в даному механізмі внизу до площин закріплена потрібна КІЛЬКІСТЬ опорних поворотних роликів 2 Механізм повороту розпашних складених площин по п 1, який відрізняється тим, що привід закріплений нерухомо відносно осі повороту площини і стійки так, що вісь вала приводу збігається з даною віссю і вал приводу з'єднаний нерухомо із даною площиною 3 Механізм повороту розпашних складених площин по п 1, який відрізняється тим, що одна із деталей механічної передачі розміщена на осі повороту площини і стійки і з'єднана нерухомо із стійкою, а друга деталь даної механічної передачі з'єднана з валом приводу, який закріплений нерухомо на даній площині 4 Механізм повороту розпашних складених площин по п 1, який відрізняється тим, що привід закріплений нерухомо на площині, яка шарнірно з'єднана із стійкою так, що вісь вала приводу співпадає з віссю повороту площини і стійки і вал приводу з'єднаний нерухомо із стійкою 5 Механізм повороту розпашних складених площин по п 1, який відрізняється тим, що одна із деталей механічної передачі розміщена шарнірно на осі з'єднаних будь-яких двох площин і з'єднана з однією із них, а друга деталь даної передачі з'єднана з валом приводу, який закріплений на другій площині 6 Механізм повороту розпашних складених площин по п 1, який відрізняється тим, що привід закріплений нерухомо на будь-якій площині так, що вісь вала приводу співпадає з віссю шарнірного з'єднання даної і іншої площин, де вал приводу з'єднано нерухомо із цією іншою площиною О (О о 49061 Механізм повороту розпашних складених площин належить до наземного будівництва принцип роботи якого призначений для конструкцій розпашних із необхідною КІЛЬКІСТЮ складальних площин брам, дверей, перегородок із розгорнутими площинами по прямій або ломаній лінії дверець в транспортних засобах, для розгортання сонячних батарей антен в космосі, для конструкції механізмів, які переміщаються методом повзучих тварин, огородженню окремих площ ділянок по заданому периметру Задачею винаходу є зменшення площі закривання в необхідне число раз, де сама площа закривання визначається добутком ширини площини на ширину прийому, який закритий, або відкритий в розпашній брамі, яким являється аналог і прототип "ИА /II/15264/1 З/А /21/ 94052454, д вертикальної сторони площини, яка не з'єднана із стійкою приєднується потрібна КІЛЬКІСТЬ шарнірне з'єднаних послідовно площин, де при повороті будь якої площини вручну або приводом всі дані площини теж повернуться і утворять одну суцільну площину необхідної довжини, а самі площини перемістяться від стійки, а при зворотному повороті будь ласої площини всі ці площини теж повернуться і складуться в стопку л~ипу гармошки/і перемістяться до стійки, де самий принцип роботи даного механізму використовується для вказаних раніше приміщень Ця конструкція основана на принципі застосування особливих трьохланкових планеторних механізмів з ВІДПОВІДНИМ передаточним числом в залежності від кута повороту наступної площини, де особливістю даної планетарної передачі являється те, що замість зубчатого зачеплення застосована пряма, або перехресна передача гнучким зв'язком, яка не допускає пробуксовки Поставлена задача вирішується тим що, механізм повороту розпашних складених площин, який містить в собі стійку, необхідну КІЛЬКІСТЬ площин, центральних коліс, сателітів, механізми фіксації площин, механізми повороту площин, притискачі, згідно до винаходу в розпашній брамі до вертикальної сторони площини, яка не з'єднана із стійкою, приєднана необхідна КІЛЬКІСТЬ ПЛОЩИН, ЯКІ с водилами особливих трьохланкових планетарних механізмів з ВІДПОВІДНИМ передаточним числом в залежності від кута повороту наступної площини, де всі площини шарнірно з'єднані між собою послідовно одна за одною по ширині площин вертикально закріпленими петлями, або спеціальними петлями, де частина півпетлі одночасно є центральним колесом або сателітом, або такими, де одна частина петлі є центральним колесом, а друга частина петлі - сателітом, де всі види шарнірних з'єднань розміщені з двох сторін товщини площин в шаховому порядку при виді зверху, в яких центральні колеса даної площини розміщені на осі, з'єднані нерухомо із попередньою площиною, розміщеною зі сторони стійки, а сателіти даної площини з'єднані нерухомо із наступною площиною, де всі центральні колеса і сателіти, які відносяться до своєї площини-водила, з'єднані між собою прямою або перехресною передачею гнучким зв'язком, яка не допускає пробуксовки, а для щільного прилягання площин в складеному стані всі гілки гнучких зв'язків, ЯКІ СХОДЯТЬ З виступаючих поверхонь центральних коліс і сателітів, притиснуті притисками до площин, механізм фіксації площин розміщений і закріплений на двох будь-яких шарнірне з'єднаних площинах або на СТІЙЦІ І шарнірне з'єднаний із нею площиною, де сам фіксатор розміщений на осі і з'єднаний нерухомо із одною площиною або стійкою, а електромагнітний стопор закріплений нерухомо на СТІЙЦІ або другій площині, в механізмі повороту площини одна із деталей механічної передачі розміщена на осі шарнірного з'єднання площини із стійкою і з'єднана нерухомо із площиною, а друга деталь даної механічної передачі з'єднана з валом приводу, який закріплений нерухомо відносно даної осі повороту, при великій КІЛЬКОСТІ площин в даному механізмі внизу до площин закріплена потрібна КІЛЬКІСТЬ опорних поворотних роликів Крім того, привод закріплений нерухомо відносно осі повороту площини і стійки так, що вісь вала приводу збігається з даною віссю і вал приводу з'єднаний нерухомо із даною площиною Або одна із деталей механічної передачі розміщена на осі повороту площини і стійки, яка з'єднана нерухомо із стійкою, а друга деталь даної механічної передачі з'єднана з валом приводу, який закріплений нерухомо на даній площині Або привод закріплений нерухомо на площині, яка шарнірне з'єднана із стійкою так, що вісь вала приводу співпадає з віссю повороту площини і стійки і вал приводу з'єднаний нерухомо із стійкою Або одна із деталей механічної передачі розміщена шарнірне на осі з'єднаних будь-яких двох площин і з'єднана з однією із них, а друга деталь даної передачі з'єднана з валом приводу, який закріплений на другій площині Або привід закріплений нерухомо на будь-якій площині так, що вісь вала приводу співпадає з віссю шарнірного з'єднання даної і іншої площин, де вал приводу з'єднано нерухомо ІЗ ЦІЄЮ ІНШОЮ ПЛОЩИНОЮ Для розуміння суті роботи даного механізму на фіг 1 і на фіг 2 схематично показаний даний механізм із розгорнутими по прямій лінії площинами На фіг 3 вид А на фіг 1, на фіг 4 - вид Б на фіг 2 На фіг 5 - розріз В-В на фіг 1, на фіг 1 на фіг 6 розріз Г-Г на фіг 1, на фіг 7- розріз Д-Д на фіг 1 і на фіг 2 На фіг 8 - розріз Е-Е на фіг 2 На фіг 9-розріз Ж-Ж на фіг 1 На фіг 10 - розріз 3-3 на фіг 1 Даний механізм містить в собі стійку 1 чотири площини 2 - 5, центральні колеса - 6, 10, 15, сателіти 9, 12, 17, петлі 16 деталі механічної передачі 25, 26,привод 27 Площина 2 з'єднана шарнірне із стійкою і двома спеціальними петлями, в яких циліндричні частини 6 з'єднані нерухомо із стійкою і являються центральними колесами для площиниводила 2, напівпетлі 7 з'єднані нерухомо із площиною-водилом 2 Центральні колеса 6 з'єднані шарнірне із напівпетлями 7 віссю 8 Розміщена вісь шарнірного з'єднання стійка 1 і площини 2 спереду площини 2 Площини 2 і 3 шарнірне з'єднані між 49061 собою двома спеціальними петлями, в яких полупетлі 9 з'єднані нерухомо із площиною 3 являються сателітами для площини-водила, а полупетлі 10 з'єднані нерухомо із площиною 2 являються центральними колесами для площини-водила З Самі полупетлі 9 і 10 шарнірне з'єднані між собою вісью 11 Розміщена вісь шарнірних з'єднань із заду площин 2 і 3 Так як площина 2 при повороті повертається відносно стійки на 90°, а решта площин повертаються одна відносно другої на куті 180°, то діаметр центрального колеса 6 в два рази більший за діаметри центральних коліс і сателітів інших площин-водил Площини 3 і 4 з'єднані шарнірне двома спеціальними петлями, в яких полупетлі 12 з'єднані нерухомо із площиною 4 являються одночасно сателітами для площини-водила З, а полупетлі 13 з'єднані нерухомо із площиною З являються звичайними частинами петель Полупетлі 12 і 13 шарнірне з'єднані між собою вісью 14 Розміщена дана вісь спереду площини 3 і 4 На тій же ВІСІ розміщена і з'єднана нерухомо із площиною З циліндрична деталь 15, яка являється центральним колесом для площини-водила 4 Площини 4 і 5 шарнірно з'єднані між собою двома звичайними петлями 16, вісь якої розміщена із заду площин 4 і 5 На тій же ВІСІ розміщена і з'єднана нерухомо із площиною 5 циліндрична деталь 17, яка являється сателітом для площини-водила 4 Діаметри всіх центральних коліс і сателітів крім центральних коліс 6 в два рази більші за товщину даних площин, так, як вони не збільшують габарити даного механізму коли площини знаходяться в складеному стані Кожне центральне колесо і сателіт, які відносяться до своєї площини-водила з'єднані між собою двома вітками стальних пружинних стрічок Так, центральне колесо 6 і сателіт 9 спереду стійки 1 і площини 2 з'єднані війкою 18 Один кінець вітки 18 закріплений до центрального колеса 6 з кутом обхвату > 90° Другий кінець вітки 18 закріплений до площини 3 При складанні площин другий кінець вітки 18 буде обхвачувати сателіт 9 Друга вітка 19 (фіг 3 вид А) одним кінцем закріплена до центрального колеса 6 з кутом його обхвату 180° Центральне колесо 10 і сателіт 12, які відносяться до площини-водила 3 спереду з'єднані віткою 20, один кінець якої закріплений до площини 2, а другий кінець до сателіта 12 з кутом обхвату > 180° При складанні площин кінець вітки 20, який закріплений до площини 2 буде обхвачувати центральне колесо 10 Друга вітка 21 (фіг 7 розріз Д-Д) одним кінцем з'єднана із центральним колесом 10 з кутом його обхвату > 180°, а другим кінцем вітка 21 з'єднана із площиною 4, яка в складеному стані площин буде обхвачувати сателіт 12 Центральне колесо 15 і сателіт 17, які відносяться до площини 4 спереду з'єднані віткою 22, яка одним кінцем закріплена до центрального колеса 15 з кутом його обхвату > 180°, а другим кінцем вітка 22 закріплена до площини 5 В складеному стані площин вітка 22 буде обхвачувати сателіт 17 вітка 23 (фіг 8 розріз Е-Е на фіг 2) одним кінцем закріплена до площини 3, а другим кінцем закріплена до сателіта 17 з кутом його обхвату > 180° В складеному стані вітка 23 обхвачує центральне колесо 15 Для щільного прилягання площин, коли вони знаходяться в складеному стані, всі вітки стальних пружинних стрічок які сходять з виступаючих поверхнів центральних коліс і сателітів притиснуті прижимами 24 (фіг 10 розріз 3-3 на фіг1) до своїх площин, - а на другому шарнірно з'єднаному із даною площиною площині існують виїмки А1,щоб в них могли знаходитись виступаючі частини прижимів 24,коли всі площини знаходяться в складеному стані Для повороту площин приводом 27 на ВІСІ шарнірного з'єднання стійки 1 і площини 2 розміщена і з'єднана нерухомо із площиною 2 деталь механічної передачі 25 Друга деталь даної механічної передачі 26 розміщена на валу привода 27, який закріплений нерухомо на СТІЙЦІ 1 Деталі 25 і 26 з'єднані між собою тросом 28, який обхвачує деталь 26 і своїми двома кінцями закріплений до деталі 25 з необхідним її обхватом, потрібним для повороту и і площини 2 При непередбаченому перевантаженні трос 28 пробуксовуватиме на деталі 26, що виключає необхідність застосування кінцевих вимикачів Натяг троса 28 здійснюється переміщенням привода 26 в пазах стійки 1 Для фіксації механізму при будь якому стані розгорнутих площин на СТІЙЦІ 1 закріплений електромагнітний стопор 29,а сам фіксатор ЗО розмішений на ВІСІ шириною з'єднання площини 2 із стійкою 1 і з'єднаний нерухомо із площиною 2 Електромагнітний стопор 29 і фіксатор ЗО можна також встановлювати на будь яких інших шарнірне з'єднаних двох площинах Для зменшення навантажень на шарнірні з'єднання площин при їх великій КІЛЬКОСТІ, особливо коли площини механізму знаходяться в розгорнутому стані внизу до площини закріплюється необхідна КІЛЬКІСТЬ опорних товарних роликів На фіг 2 опорний поворотний ролик 31 закріплений до площини 5 Даний механізм працює таким чином При включенні привода 27 спочатку виводиться електромагнітний стопор 29 із паза фіксатора ЗО Після цього приводиться в обертання закріплена на валу привода 27 деталь механічної передачі 26, яка гнучким зв'язком 28 повертає деталь 23 і площину 2 Площина 2 як водило планетарної передачі повертаючись навколо своїх центральних коліс 6 своїми двома вітками 18 і 19 гнучкого зв'язку поверне сателіти 9 і з'єднає із ними площину 3 в протилежну сторону В свою чергу площина 3 як водило повертаючись відносно нерухомої площини 2 і своїх центральних коліс 10 своїми вітками 20 і 21 гнучкого зв'язку поверне свої сателіти 12 і з'єднану площину 4 в протилежну сторону, тобто в ту же сторону ще і площину 2 Площина 4 як водило повертаючись відносне нерухомої площини 3 і свого центрального колеса 15 своїми вітками 22 і 23 гнучкого зв'язку поверне свій сателіт 17 і площину 5 в протилежну сторону, тобто в ту же сторону що і площину 3 При приєднанні більшої КІЛЬКОСТІ площин все буде повторюватись аналогічно Змінюючи передаточні числа планетарних передач, порядок розташування вісей шарнірних з'єднано площин, а також змінюючи пряму передачу на перехресну, можна досягнути того, що площини механізму будуть розгорнуті по ВІДПОВІДНІЙ ломаній лінії На фіг 21 показаний приклад коли привод 49061 27 закріплений нерухомо в СТІЙЦІ І так, що вісь вала привода 27 співпадає з віссю шарнірного з'єднання стійки 1 і площини 2, де вал привода 27 з'єднаний нерухомо із площиною 2 деталі 32 На фіг 12 показаний приклад коли одна із деталей механічної передачі 25 розміщена на ВІСІ повороту стійки 1 і площини 2 і яка з'єднана нерухомо із стійкою 1, а друга деталь даної передачі 26 розміщена на валу привода 27 який закріплений нерухомо на площині 2 Деталі 25 і 26 в даному прикладі з'єднані тросом 28 В цьому випадку поворот площини здійснюється планетарним способом На фіг 13 показаний приклад коли привод 27 закріплений так на площині 2, що вал привода 27 співпадає з віссю повороту площини 2 і стійки 1, де вал привода 27 з'єднаний нерухомо із стійкою 1 деталлю 32 На фіг 14 показаний приклад, коли одна із деталей механічної передачі 26 розміщена на валу привода 27 який закріплений нерухомо на будь якій площині, в даному прикладі на площині 4, а друга деталь даної передачі 25 розміщена на ВІСІЙ повороту даної площини із попередньою, або наступною площиною яка з'єднана нерухомо однією із цих площин На фіг 14 вибраною являється наступна площина 5 Деталі 25 і 26 з'єднані між собою гнучким зв'язком 28 На фіг 15 показано приклад, коли привод 27 закріплений на будь якій площині нерухомо так, що вісь вала привода 27 співпадає з віссю повороту попередньої або наступної площини, де вал привода 27 з'єднаний нерухомо однією із цих площин деталі 32 На фіг 15 привод 27 закріплений нерухомо на площині З, де його вал з'єднані нерухомо із наступною площиною 5 деталлю 32 При розгорнутому стані всі площини і їх ВІСІ повороту перемістяться від стійки, а в складеному стані всі вони перемістяться до стійки крім нерухомої ВІСІ, яка з'єднує площину 2 із стійкою 1 Віддаль і швидкість площини буде різна Найбільшу віддаль і швидкість буде мати сама крайня площина 5 найбільш віддалена від стійки 1, так як до віддалі і швидкості наступної площини додається віддаль і векторна швидкість даної площини Ці властивості площин можна використати в різних галузях техніки Наприклад для конструкцій механізмів які переміщаються методом повзучих тварин На фіг 16 схематично показаний механізм який складається із 6-ти площин 2, 5, 32 і 35 розміщений плоскісно на поверхні На самих крайніх площинах 2 і 33, які торкаються поверхні і на нижніх вісях з'єднань площин 3 і 4 і 32, які контачать з поверхнею вільно розміщені колеса 34, 37 Механізм повороту площини може застосуватися згідно раніше вказаних фіг 14, або фіг,15 На фіг 16 механізм повороту площини вибраний згідно фіг 14 При загальмуванні коліс 34 в процесі розгортання всі площини перемістяться від загальмованих коліс 34 Площина 2 являється шарнірно з'єднаною колесом 34 із поверхнею-стійкою Після ЦЬОГО при розгальмуванні коліс 34 і загальмуванні коліс 37 в процесі складання всі площини перемістяться до цих загальмованих коліс 37 і приймуть попереднє вихідне положення, але будуть переміщеними на величину 5 Змінюючи гальмування будь-яких та 8 інших коліс 34-37 і змінюючи напрям обертання вала привода 27, можна міняти величину шляху 9 переміщення, швидкість і напрямок переміщення Загальна довжина шляху, на яку перемістяться площина за один цикл розгортання і складання площин буде S = b'n (cosLo -cosl_i - COSL2), Де S - величина шляху переміщення, b - ширина площини, п - КІЛЬКІСТЬ площин, яка знаходилась між двома парами загальмованих коліс І_о кут нахилу площин, де поверхні в розгорнутому стані, І_і - кут нахилу площин до поверхні перед початком розгортання площин І_2 - кут нахилу площин до поверхні в складеному стані переміщеними де загальмованих коліс 37 На фіг 16І_о = 0°, І_і = І_2, п = Ь, КІЛЬКІСТЬ площин п = 6 Тоді формула прийме вид S = 6b(1 - 2cosl_i) При огородженні площі обмеженою замкнутою ломаною ЛІНІЄЮ контура механізмом повороту розпашних багатоскладаних площин із одним приводом 27 його площини в процесі їх одночасного розгортання будуть займати всю огороджувану площину Для зменшення цього недоліку застосовується даний механізм із однією стійкою і багатьма приводами 27, де кожний привод 27 розгортає свою групу площин на своїй прямій ДІЛЬНИЦІ контуру В процесі розгортання приводом 27 своєї групи площин на своїй ДІЛЯНЦІ контуру всі попередні групи площин із своїми приводами 27 являються розгорнутими на своїх дільницях контуру, а наступні групи площин являються переміщеними із складеними площинами по тій же прямій ДІЛЬНИЦІ що і розгорнута група площин, а при необхідності повернута на необхідний кут Сам процес огородження площі починається із групи площини яка шарнірне з'єднана із стійкою 1 На фіг 17-21 для розуміння суті процесу огородження прямокутної форми ДІЛЬНИЦІ площі схематично показана на планах послідовно поетапне розгортання проводами 27 своїх груп площин на своїх прямих ЛІНІЯХ контуру площі На фіг 17 показані всі чотири групи площин в складеному стані На фіг 18 показана 1-ша група площин в розгорнутому стані, а три решти груп знаходяться в складеному стані Розгортання 1-ої групи, яка з'єднана із стійкою 1, здійснюється раніше вказаними способами На фіг 19 показана розгорнута 2га група із 6-ти площин Розгортання 2-ої групи здійснено приводом 27 згідно фіг 14 На фіг 20 показана розгорнута 3-тя група із двох площин приводом 27 згідно фіг 14 На фіг 21 показані в розгорнутому стані всі чотири групи площин Четверта група із 6-ти площин розгорнута приводом 27 згідно фіг 15 На фіг 22 показана розгортка по А-А, на фіг 21 де показані площини 4-ох груп, центральні колеса і х гнучкий зв'язок із сателітами Огородження заданої площі починається із розгортання 1-ої групи трьох площин 2 - 4, які з'єднані із стійкою 1 поворотом площини 2 відносно стійки 1 на кут 90° приводом 27, закріпленим нерухомо в СТІЙЦІ 1 через деталі механічної передачі 26, 25 гнучким зв'язком 28 Поворот площини 3 відносно площини 2 на кут 180° здійснюється через центральне колесо 6, сателіт 9 і гнучкий зв'язок 48 Діаметр центрального колеса 6 в два рази більший за сателіт 9 Поворот площини 4 відносно площини З 49061 на 180° здійснюється через центральне колесо 10, сателіт 9 гнучким зв'язком 48 Розгортання 2-ої групи, до якої належить 6 площин 5, 32, 33, 37 - 39, здійснений поворотом площини 5 відносно площини 4 на кут 90° приводом 27, закріпленим нерухомо на площині 5 через деталі механічної передачі 26, 25 і гнучкого зв'язку 28 Поворот площини 32 відносно площини 5 аналогічний повороту площини 3 відносна площина 2, а поворот площини 33, 37 - 39 аналогічний повороту площини 4 відносно площини 3 До З-оі групи належать дві площини 40 і 41, ширина яких в 1,5 рази більша за ширину даних площин Поворот площини 40 відносно площини 39 аналогічний повороту площини 5 відносно площини 4 на кут 90°, а поворот площини 41 відносно площини 40 на 180° аналогічний повороту площини 3 відносно площини 2 Поворот площини Фіг 1 10 42 відносно площини 41 на кут 90°, здійснений приводом 27 згідно схеми на фіг 15 Поворот площини 43 відносно площини 42 на 180° аналогічний повороту площини 3 відносно площини 2, а поворот площини 44 - 47 на 180° аналогічний повороту площини 4 відносно площини 3 Для усунення впливу ваги площин на шарнірні з'єднання площин, особливо на шарнірне з'єднання площини із стійкою, коли всі площини знаходяться в розгорнутому стані знизу до площин закріплюється необхідна КІЛЬКІСТЬ опорних поворотних роликів 31 Гнучкий зв'язок 28, який існує між деталями 25 і 26, а також самі деталі можуть бути замінені будьякою іншою механічною передачею, наприклад зубчатою, фрикцюнную і т д 11 49061 12 Є-Е Фіг 8 Ж-Ж зо Фіг. 10 Фіг 9 4 Фіг 13 В Фіг 14 13 Фіг. 17 49061 14 Фіг ФІГ. 19 с "Т ІГ 32 1 | ІЗ 37 33 Г"Т™ 2 2 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 39
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanism for turning opening folded plates
Назва патенту російськоюМеханизм поворота распашных сложенных плоскостей
МПК / Мітки
МПК: E05D 15/26, E06B 3/00
Мітки: площин, складених, механізм, розпашних, повороту
Код посилання
<a href="https://ua.patents.su/7-49061-mekhanizm-povorotu-rozpashnikh-skladenikh-ploshhin.html" target="_blank" rel="follow" title="База патентів України">Механізм повороту розпашних складених площин</a>
Пристрій для фрезерування похилих площин надресорних балок
Номер патенту: 747
Опубліковано: 15.03.2001
Автори: Паршиков Юрій Васильович, Войтенко Володимир Федорович, Кордунян Володимир Іванович, Войтович Микола Іванович, Багнюк Олександр Михайлович, Гринюк Валерій Степанович
МПК: B23C 3/00
Мітки: похилих, пристрій, надресорних, фрезерування, балок, площин
Формула / Реферат:
Пристрій для фрезерування похилих площин надресорних балок, що містить основу, всередині якої розміщені головний привід і фрезерна головка з шпинделем і встановленою в ньому фрезою, механізм переміщення фрези по осі з штурвалом, лімбом і двозахідною черв'ячною передачею, який відрізняється тим, що основа виконана у вигляді плоскої плити з прилаштованими до неї кронштейнами з можливістю встановлення плити на верхній . поверхні надресорної...
Механізм повороту вагона підвісної монорейкової системи попова
Номер патенту: 29120
Опубліковано: 16.10.2000
Автор: Попов Євгеній Іванович
МПК: E01B 27/17
Мітки: попова, механізм, монорейкової, повороту, підвісної, вагона, системі
Формула / Реферат:
Механізм повороту вагону підвісної монорейкової системи, що має фундаментну плиту, яка має платформу, що обертається з електричним приводом і обертовою рейкою, яка відрізняється тим, що обертова рейка закріплена асиметрично на платформі над нею по її горизонтальній осі на кінцях верхніх лап на висоті, що перевищує висоту кузова вагона, а над рейкою, паралельно їй, на кронштейнах закріплені відрізок реактивної смуги лінійних електродвигунів і...
Механізм повороту лопаток компресора
Номер патенту: 14279
Опубліковано: 25.04.1997
Автор: Модзелевський Юрій Васильович
МПК: F04D 27/00
Мітки: компресора, повороту, механізм, лопаток
Формула / Реферат:
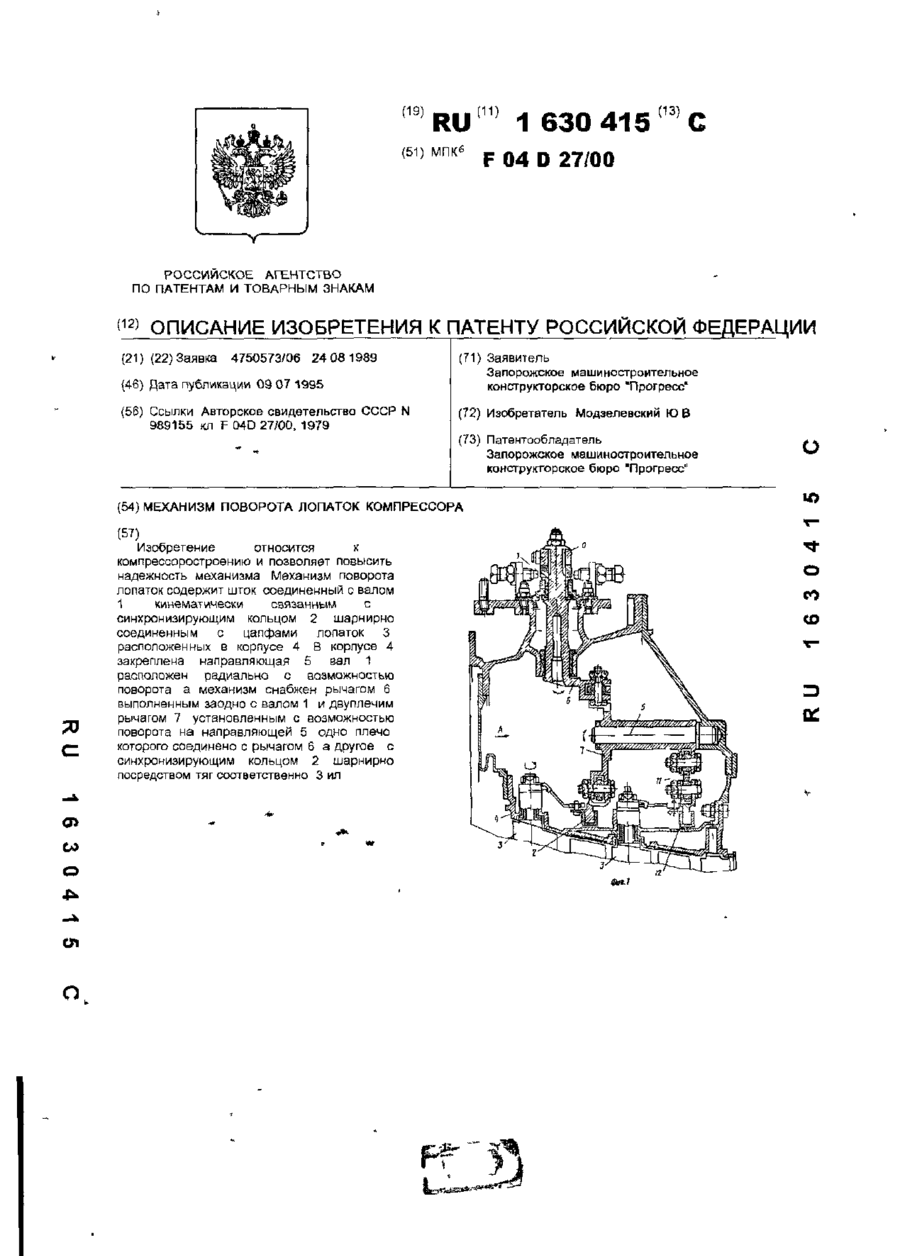
Механизм поворота лопаток компрессора, содержащий шток, соединенный с валом, кинематически связанным с синхронизирующим кольцом, шарнирно соединенным с цапфами лопаток, расположенных в корпусе, отличающийся тем, что, с целью повышения надежности, в корпусе закреплена направляющая, вал расположен радиально с возможностью поворота, а механизм снабжен рычагом, выполненным заодно с валом, и двуплечим рычагом, установленным с возможностью...
Механізм повороту стола на заданий кут
Номер патенту: 18799
Опубліковано: 25.12.1997
Автори: Перель Петро Ізраілевич, Перель Світлана Петрівна
МПК: F16H 21/00
Мітки: заданій, стола, кут, механізм, повороту
Формула / Реферат:
1. Механизм поворота стола на заданный угол, содержащий основание, привод, шарнирно установленный на основании, стол, связанный с приводом при помощи оси и установленный на основании с возможностью поворота вокруг нее, ведущее звено, шарнирно соединенное с приводом и одним концом шарнирно связанное с основанием, ведомое звено, одним концом шарнирно связанное с осью поворота стола, а другим - шарнирно связанное со свободным концом ведущего...
Механізм повороту лопаток осьової турбомашини

Номер патенту: 23945
Опубліковано: 16.04.2001
Автори: Безверхий Валерій Іванович, Сілант'єв Олег Володимирович, Романова Таісія Василівна, Смірнов Станіслав Іванович
МПК: F04D 27/00, F01D 7/00
Мітки: механізм, повороту, лопаток, турбомашині, осьової
Формула / Реферат:
1. Механизм поворота лопаток осевой турбомашины, содержащий подвижное синхронизирующее кольцо, соединенное с цапфами поворотных лопаток и основным пневмоприводом, соединенным с проточной частью компрессора, отличающийся тем, что он содержит дополнительный пневмопривод, расположенный диаметрально противоположно основному и выполненный без управляющего цилиндра, при этом для синхронизации работы пневмоприводов их подпоршневые полости соединены...
Попередній патент: Засіб “йохімбекс-гармонія” для лікування розладів статевої функції у чоловіків
Наступний патент: Плуг із змінною шириною захвату
Випадковий патент: Живильне середовище для культивування bordetella pertussis