Пристрій стабілізації осьового положення площини планшайби аеростатичної шпиндельної опори
Формула / Реферат
Пристрій стабілізації осьового положення площини планшайби аеростатичної шпиндельної опори, який включає компенсатори осьового зміщення вала, датчик величини регульованого зазору, вимірювач величини регульованого зазору, диференційний підсилювач, підсилювачі, який відрізняється тим, що в порожнині вала аеростатичної шпиндельної опори установлений вимірювальний стрижень, причому згаданий вимірювальний стрижень прикріплений до внутрішньої поверхні вала аеростатичної шпиндельної опори в площини симетрії п'ятиосьової аеростатичної опори, в торцях вимірювального стрижня з зазорами відносно внутрішніх поверхонь торців вала аеростатичної шпиндельної опори установлені датчики величини контрольного зазору і зазору корекції, в склад пристрою також входить вимірювач величини контрольного зазору, вимірювач величини зазору корекції, обчислювач, інтегруючий ланцюжок, електронний ключ, при цьому датчик величини регульованого зазору з'єднаний з вимірювачем величини регульованого зазору, вихід вимірювача величини регульованого зазору з'єднаний з входом електронного ключа і з входом обчислювача, датчик величини контрольного зазору з'єднаний з вимірювачем величини контрольного зазору, вихід вимірювача величини контрольного зазору з'єднаний з входом обчислювача, датчик величини зазору корекції з’єднаний з вимірювачем величини зазору корекції, вихід вимірювача величини зазору корекції з'єднаний з входом обчислювача, виходи обчислювача з'єднані з входом електронного ключа і з входом інтегруючого ланцюжка, вихід інтегруючого ланцюжка з'єднаний з першим входом диференціального підсилювача, вихід електронного ключа з'єднаний з другим входом диференціального підсилювача, виходи диференціального підсилювача з'єднані з входами підсилювачів, виходи підсилювачів через вимикачі з'єднані з п'єзоелектричними двигунами компенсаторів осьового зміщення вала аеростатичної шпиндельної опори.
Текст
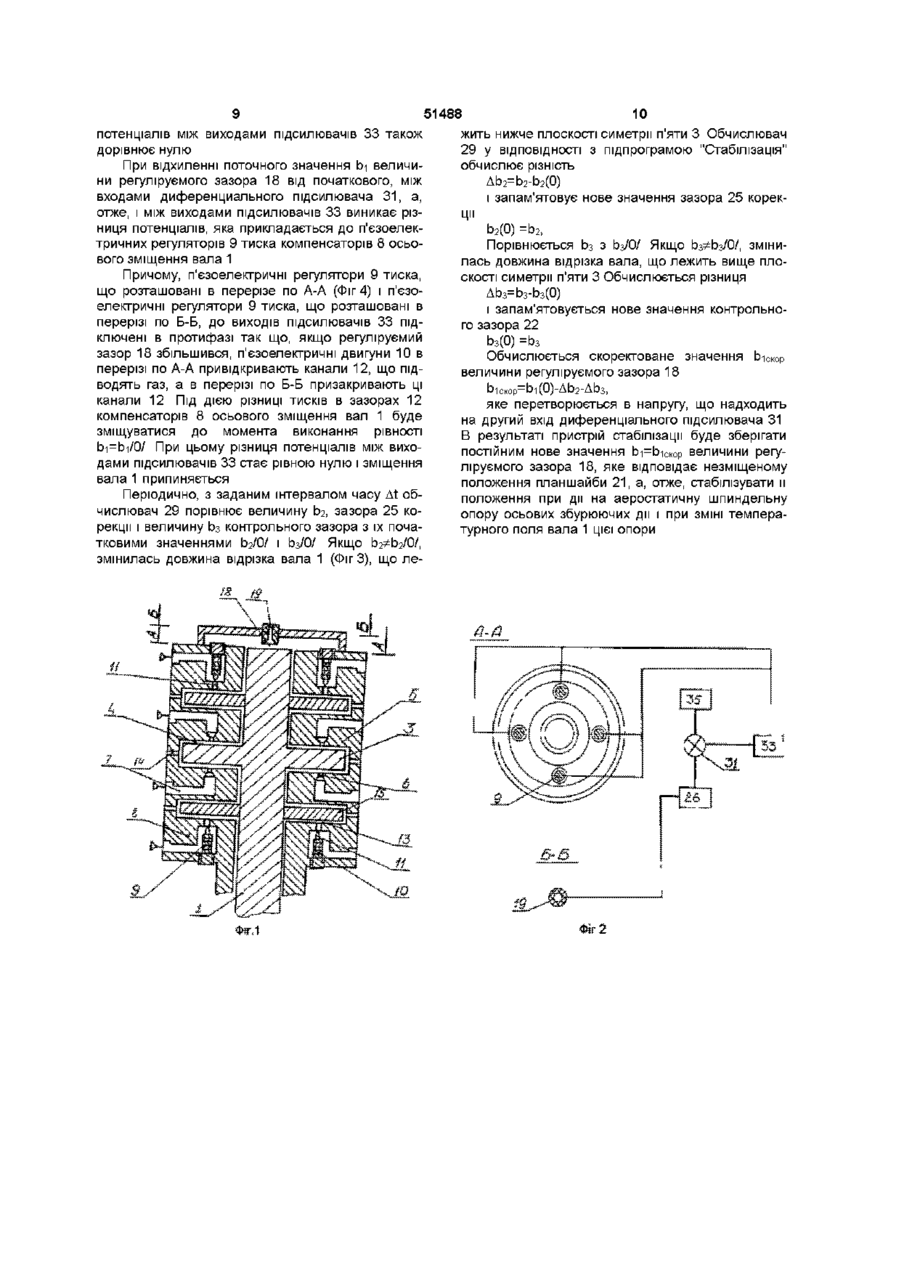
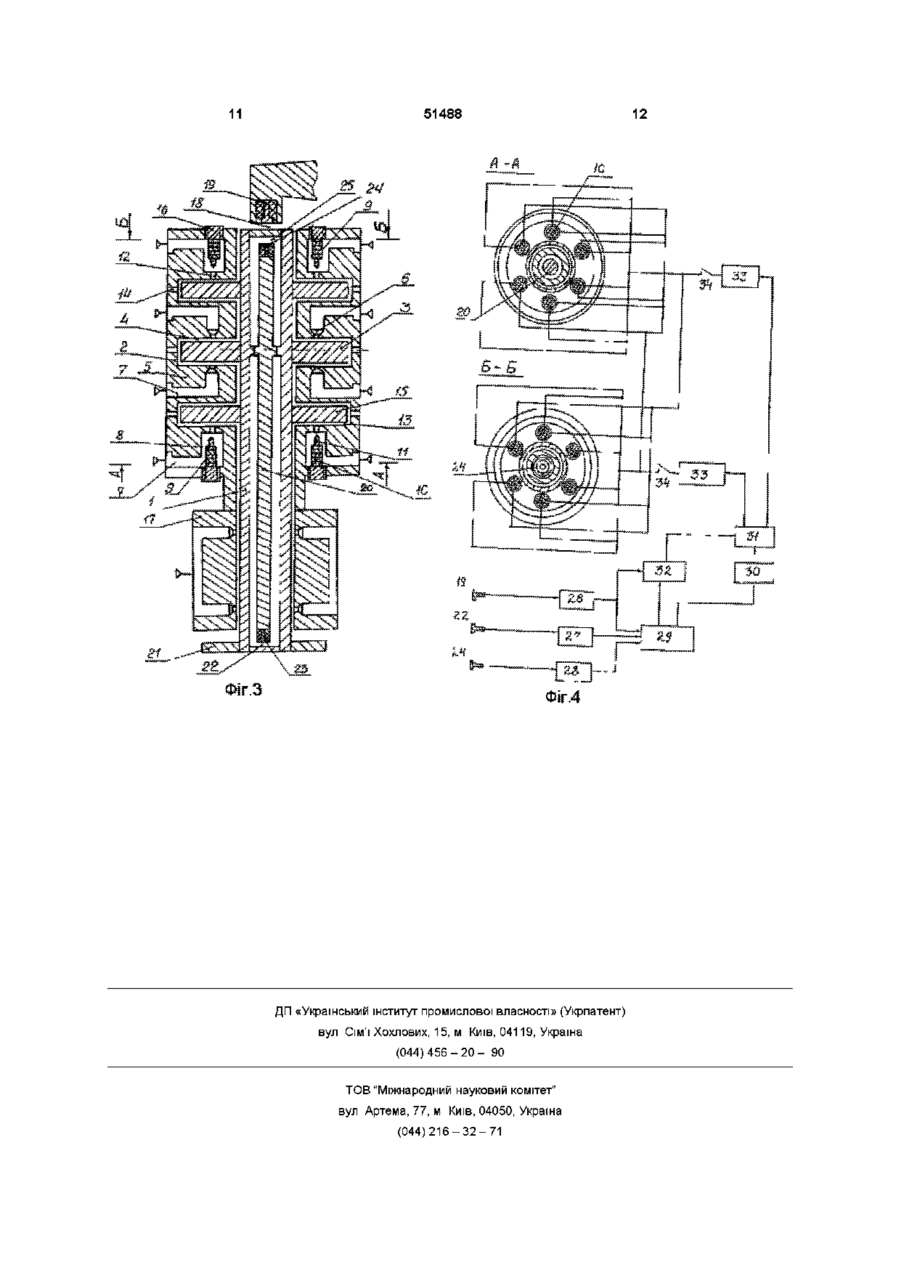
Пристрій стабілізації осьового положення площини планшайби аеростатичної шпиндельної опори, який включає компенсатори осьового зміщення вала, датчик величини регульованого зазору, вимірювач величини регульованого зазору, диференційний підсилювач, підсилювачі, який відрізняється тим, що в порожнині вала аеростатичної шпиндельної опори установлений вимірювальний стрижень, причому згаданий вимірювальний стрижень прикріплений до внутрішньої поверхні вала аеростатичної шпиндельної опори в площини симетрії п'ятиосьової аеростатичної опори, в торцях вимірювального стрижня з зазорами відносно внутрішніх поверхонь торців вала аеростатичної шпиндельної опори установлені датчики величини контрольного зазору і зазору корекції, в склад пристрою також входить вимірювач величини контрольного зазору, вимірювач величини за зору корекції, обчислювач, інтегруючий ланцюжок, електронний ключ, при цьому датчик величини регульованого зазору з'єднаний з вимірювачем величини регульованого зазору, вихід вимірювача величини регульованого зазору з'єднаний з входом електронного ключа і з входом обчислювача, датчик величини контрольного зазору з'єднаний з вимірювачем величини контрольного зазору, вихід вимірювача величини контрольного зазору з'єднаний з входом обчислювача, датчик величини зазору корекції з'єднаний з вимірювачем величини зазору корекції, вихід вимірювача величини зазору корекції з'єднаний з входом обчислювача, виходи обчислювача з'єднані з входом електронного ключа і з входом інтегруючого ланцюжка, вихід інтегруючого ланцюжка з'єднаний з першим входом диференціального підсилювача, вихід електронного ключа з'єднаний з другим входом диференціального підсилювача, виходи диференціального підсилювача з'єднані з входами підсилювачів, виходи підсилювачів через вимикачі з'єднані з п'єзоелектричними двигунами компенсаторів осьового зміщення вала аеростатичної шпиндельної опори 00 00 Винахід відноситься до верстатобудування і може бути використаний при конструюванні прецизійних верстатів По а с СРСР № 1639180 від 1 12 1990р відома аеростатична осьова опора /Фіг 1/, яка включає двохсторонній аеростатичний підп'ятник з обох сторін якого встановлені дві групи компенсаторів 8 осьового зміщення вала і систему автоматичного регулювання, яка стабілізує осьове положення вала 1 Осьова аеростатична опора по а с СРСР № 1639180 вибрана у якості прототипа Працює осьова аеростатична опора прототипа наступним образом При ЗМІНІ величини зазора під датчиком 19 величини рєгуліруємого зазора на пристрої порівняння 31 виникає сигнал, який відповідає величині віхилення сигнала перетворювача 26 від сигнала задатчика 35 Сигнал неузгодження підсилюється підсилювачем 33 і надходять на п'єзоелектричні двигуни 10 компенсаторів 8 осьового зміщення вала 1 В результаті тиск в зазорах 13 (Фіг1) компенсаторів осьового зміщення вада змінюється так, що під датчиком 19 відновлюється величина зазора, що задається задатчиком 35 В данному випадку осьове положення вала 1 стабілізується при дії на нього таких осьових збурень як зміщення вала 1 із-за деформації поля тиска в зазорах 4 погрішностями розмірів і форми виготовлення п'ят 3 і ПІДП'ЯТНИКІВ 5, осьової складової сили різання, осьової складавої коливань станини верстата Недоліком прототипа являється те, що якщо виникає осьова температурна деформація вала 1, він підвищує погрішність обробки із-за зміщення планшайби, яке обумовлене осьовою температурною деформацією вал ю 51488 Нехай, наприклад, із-за підвищення температури газа, що надходить на піддув опори чи збільшенню припливу тепла із зони різання вал 1 подовжився Вимкнемо систему автоматичного регулювання осьової аеростатичної опори і виключимо вплив цієї системи на положення вала 1 В результаті подовження відрізка вала 1, який лежить вище плоскості сіметрм п'яти 3, зменшиться величина рєгуліруємого зазора 18 під датчико 19 (Фіг 2) В результаті подовження відрізка вала, що лежить нижче плоскості сіметрм п'яти 3, відбудеться зміщення планшайби, що викличе зростання погрішності обробки Увімкнемо пристрій автоматичного регулювання Зменшення величини регулируемого зазора 18 сприймається цим пристроєм як зміщення вада 1 до датчика 19 В результаті вія буде зміщений компенсаторами 8 осьового зміщення від датчика 19 на величину температурної деформації цього відрізка вала 1 Погрішність обробки додатково збільшиться Задача винаходу полягає у такому удосконалити конструкції осьової аеростатичної опори, яке дозволяє вимірювати осьову температурну деформацію вада опори і зміщати вал так, що положення планшайби у просторі зберігається незмінним Для цього з установленою дискретою часа At вимірюють величини температурної деформації відрізків вала 1, що лежать по обидві сторони від плоскості сіметрм п'яти 3 По величинам осьової температурної деформації відрізків вада 1 розраховують величину корекції рєгуліруємого зазора 18 і під датчикам 19 величини рєгуліруємого зазора утримують скоректовану величину зазора 18 В результаті запобігають осьове зміщення планшайби як при дії осьового навантаження так і при виникненні осьової температурної деформації вала 1 Рішення цієї задачі досягається тим, що пристрій стабілізації осьового положення площини планшайби аеростатичної шпиндельної опори, який включає компенсатори осьового зміщення вала, датчик величини рєгуліруємого зазора, вимірювач величини рєгуліруємого зазора, диференційний підсилювач, підсилювачі, згідно винаходу, в порожнині вала аеростатичної шпиндельної опори установлений вимірювальний стрижень, причому згаданий вимірювальний стрижень прикріплений до внутрішньої поверхні вала аеростатичної шпиндельної опори в площини сіметрм п'ят осьової аеростатичної опори, в торцях вимірювального стрижня з зазорами відносно внутрішніх поверхнень торців вала аеростатичної шпиндельної опори установлені датчики величини контрольного зазора і зазора корекції, в склад пристрою також входить вимірювач величини контрольного зазора, вимірювач зазора корекції, обчислювач, інтегрируючій ланцюжок, електронний ключ, причому датчик величини рєгуліруємого зазора з'єднаний з вимірювачем величини рєгуліруємого зазора, вихід вимірювача величини рєгуліруємого зазора з'єднаний з входам електронного ключа і а входом обчислювача, датчик величини контрольного зазора з'єднаний з вимірювачем величини контрольного зазора, вихід вимірювача величини контрольного зазора з'єднаний з входам обчислювача, датчик величини зазора корекції з єднаний з вимірювачем зазора корекції, вихід вимірювача зазора корекції з'єднаний з входам обчислювача, виходи обчислювача з'єднані з входам електронного ключа і з входам штегрируючого ланцюжка, вихід інтегрируючого ланцюжка з'єднаний з першим входом диференціального підсилювача, вихід електронного ключа з'єднаний з другим входом диференціального підсилювача, виходи диференціального підсилювача з'єднані з входами підсилювачів, виходи підсилювачів через вимикачі з'єднані з п'єзоелектричними двигунами компенсаторів осьового зміщення вала аеростатичної шпиндельної опори Причинно - наслідковий зв'язок між сукупністю суттєвих ознак винаходу, що заявляється, і досягаємим технічним результатам полягає у наступному В момент часа початка точіння вимірюють і запам'ятовують величини регулируемого зазора 18, зазора 25 корекції і контрольного зазора 23 (Фіг 3) Температурна деформація вала є величина, яка змінюється повільно 3 установленою дискретою часу At, за час якої зміщення планшайби не перевищить допустимої величини, вимірюють величини зазора 25 корекції і контрольного зазора 23 і порівнюють їх з початковими значеннями величин цих зазорів Нехай в який то момент часу зазор 25 корекції збільшився на величину ДЬг а контрольний зазор 23 збільшився на величину ДЬз При відсутності пристрою стабілізації осьового положення плоскості планшайби планшайба від плоскості сіметрм п'яти зміститься (ФігЗ) на величину ДЬз, а величина регулируемого зазора зменшиться на величину ДЬг Пристрій автоматичного регулювання прототипа сприймає це зменшення величини регулируемого зазора 18 як зміщення вада під дією осьового навантаження в напрямку датчика 19 величини контрольного зазора і додатково змістить планшайбу на ДЬг, відновлююч величину контрольного зазора 18 Результируюча величина зміщення план шайби із-за температурної деформації вала буде дорівнювати В пристрої, що заявляється, для виключення осьового зміщення план шайби величину регулируемого зазора 18 b-is коректують шляхом зменшення його початкового значення на величину ДЬі bis =Ьі 8 (0)- ДЬі В результаті вал 1 разом з планшайбою буде зміщений в напрямку датчика 19 рєгуліруємого зазора на ДЬз і планшайба буде займати початкове положення, а зменшення величини рєгуліруємого зазора 18 на величину ДЬг, не сприймається пристроєм як зміна величини рєгуліруємого зазора Погрішність осьового положення плоскості планшайби при малих дискретах час At визначається погрішністю вимірювання величин зазорів 18, 23, 25, а також погрішністю (шумом) пристрою стабілізації Як відомо, (Гриневич Б Ф "Измерительные компенсационно - мостовые устройства с емкостными датчиками", Киев, Наукова Думка, 1987г) якщо величина зазора Ь=5мкм, погрішність його вимірювання не перевищує 0,005бмкм 51488 Тоді максимальна середньоквадратична погрішність пристрою (Небывалов А В "Робастные системы автоматического управления", М , Наука, 1983г) може бути обчислена по формулі ДЄ 1^ -і-1^ -і-1^ '23max ~г '25max ~г 'пристр max > hsmax, І23гпах, І25гпах - МЭКСИМЭЛЬН! СЄрЄДНЬО квадратичні погрішності вимірювань величин зазорів 18, 23, 25, Іпристтах - максимальна ссередньоквадратичнэ погрішність відпрацювання заданої величини регуліруємого зазора 18 пристроєм стабілізації Для приведеної точності вимірювань величин зазорів погрішність Ітах може не перевищувати 0 01мкм Винахід пояснюється кресленнями Фіг 1 - осьова аеростатична опора прототипа (осьовий переріз) Фіг 2 - пристрій автоматичного регулювання прототипа Фіг 3 - аеростатична шпиндельна опора (осьовий переріз) Фіг 4 - функціональна схема пристрою стабілізації осьового положення планшайби аеростатичної шпиндельної опори Пристрій стабілізації осьового положення плоскості планшайби аеростатичної шпиндельної опори (ФігЗ) включає вал 1, осьову аеростатичну опору 2, що включає п'яту 3, укріплену на валу 1 По обидві сто рони від п'яти 3 і з зазорами 4 відносно неї розташовані підп'ятники 5, в яких виконані жиклери 6 подачі газа у згадані зазори 4 7 - камери піддува В аеростатичній шпиндельній опорі по обидві сторони осьової аеростатичної опори 2 установлені компенсатори 8 осьового зміщення вала 1 які складаються із п'єзоелектричних регуляторів 9 тиска Кожний п'єзоелектричний регулятор 9 тиска включає п'єзоелектричний двигун 10 з встановленою на ньому голкою 11 для зміни площ поперечних перерізів подводящих каналів 12 газа в зазори 13 компенсаторів 8 14 - випускні вікна Зазори 13 компенсаторів осьового зміщення вала утворені цими компенсаторами 8 і жорстко закріпленими на валу дисками 15 Причому, п'єзоелектричні двигуни 10 установлені на регуліровочних гвинтах 16, що забезпечують зміщення п'єзоелектричних двигунів 10 разом з встановленими на них галками 11 вздовж осі сіметрм подводящих каналів 12, для установлення початкового значення площ поперечних перерізів цих підводящих каналів 12 Силове замикання вала 1 аеростатичної шпиндельної опори в радіальному напрямку забезпечується радіальної аеростатичною опорою 17 Регуліруємий зазор 18 утворений торцем вала 1 і основою датчика 19 величини регулируемого зазора По аміні величини регулируемого зазора 18 визначають величину осьового зміщення планшайби (при відсутності осьової температурної деформації вала) Причому датчик 19 величини регулируемого зазора установлюють незалежно від корпуса аеростатичної шпиндельної опори (Фіг 3) Вал 1 виконують порожнистим В порожнині вала 1 установлюють вимірювальний стрижень 20, виконаний із матеріала з малим або нульовим коефіцієнтом температурного розширення Вимірю вальний стрижень 20 прикріплюється до внутрішньої поверхні вала 1 в плоскості симетрії п'яти З При ЗМІНІ температури вала 1 його відрізки, що лежать по обидві сторони плоскості симетрії п'яти З вільно змінюють свою довжину відносно відрізків вимірювального стрижня 20, що лежать по ту ж сторону плоскості симетрії п'яти З В ближчій до планшайби 21 торець стрижня 20 вставлений датчик 22 величини контрольного зазора 23, утвореного внутрішньою поверхнею торця вала 1 і основою датчика 22 величини контрольного зазора В другий торець стрижня вставлений датчик 24 величини зазора 25 корекції, утвореного внутрішньою поверхнею цього торця вала 1 і основою датчика 24 величини зазора корекції Вимірювання величини контрольного зазора 23 і величини зазора 25 корекції забезпечує можливість стабілізації осьового положення плоскості планшайби 21 аеростатичної шпиндельної опори Сигнали датчика 19 величини регулируемого зазора, датчика 22 величини контрольного зазора і датчика 24 зазора величини корекції (Фіг 4) перетворюються вимірювачем 26 величини регулируемого зазора, вимірювачем 27 величини контрольного зазора і вимірювачем 28 величини зазора корекції, ВІДПОВІДНО, в напруги, які відповідають величинам цих зазорів В якості вимірювачів величин зазорів використовуються вимірювачі мікропереміщень, що наведені в монографії (Гриневич Б Ф "Измерительные компенсационно - измерительные устройства с емкостными датчиками" Киев, Наукова Думка, 1987г) ВИХІДНІ напруги вимірювача 26 величини регулируемого зазора, вимірювача 27 величини контрольного зазора, вимірювача 28 величини зазора корекції надходять в обчислювач 29 Обчислювач 29 по вимірюванням величини зазора 25 корекції, контрольного зазора 23 і регулируемого зазора 18, що надійшли, здійснює корекцію початкових значень величин цих зазорів і розрахунок величини регулируемого зазора 18, що відповідає незміщеному положенню планшайби 21 В якості обчислювача 29 може використовуватися персональна ЕОМ, яка оснащена модулем уводу - виводу для обміну інформацією з функціональними елементами (Науман Г "Стандартные интерфейсы для измерительной техники", М , Мир, 1982г) Двійковий КОД обчисленого значення величини регулируемого зазора 18 перетворюється в обчислювачі 29 у напругу, що відповідає цьому коду, і надходить на штегрируючій ланцюжок ЗО Інтегрируючій ланцюжок ЗО служить для с т а жування вихідної напруги обчислювача 29, що ступінчасто змінюються Диференціальний підсилювач 31 виробляє два протифазні сигнала, різниця потенціалів між якими відповідає різниці потенціалів сигналів на його вході Напруга, що відповідає величині регулируемого зазора 18 з вимірювача 26 величини регулируемого зазора на перший вхід диференціального підсилювача 31 надходить через електронний ключ 32 Підсилювачі 33 підсилюють сигнали диференціального підсилювача 31 що надходять на п'єзоелектричні регулятори 9 тиска компенсаторів 8 осьового зміщення вала 1 Вимикачі 34 служать для відключення п'єзоелектричних двигунів 10 від підсилювачів 33 при настроюванні пристрою На кресленнях також означений задатчик 35 величини регулируемого зазора Причому, датчик 19 величини регуліруємого зазора з'єднаний з вимірювачем 26 величини регуліруємого зазора, вихід вимірювача 26 величини регуліруємого зазора з'єднаний з входом обчислювача 29 і з входам електронного ключа 32, датчик 22 величини контрольного зазора з'єднаний з вимірювачам 27 величини контрольного зазора, вихід вимірювача 27 величини контрольного зазора з'єднаний з входом обчислювача 29, датчик 24 величини зазора корекції з'єднаний з вимірювачем 28 величини зазора корекції, вихід вимірювача 28 величини зазора корекції з'єднаний з входом обчислювача 29, виходи обчислювача 29 з'єднані з входом електронного ключа 32 і з входом інтегрируючого ланцюжка ЗО, вихід штегрируючого ланцюжка ЗО з'єднаний з першим входом диференціального підсилювача 31, вихід електронного ключа 32 з'єднаний з другим входам диференціального підсилювача 31, виходи диференціального підсилювача 31 з'єднані з входами підсилювачів 33, вихор підсилювачів 33 через вимикачі 34 з'єднані з п'єзоелектричними двигунами 10 компенсаторів 8 осьового зміщення вала Перед початком роботи пристрою стабілізації осьового положення планшайби аеростатичної шпиндельної опори установлюють початкові значення площ поперечних перерізів подводящих каналів 12 в зазори 13 компенсаторів 8 осьового зміщення Для цього подають тиск в радіальну аеростатичну опору 17 і в аеростатичний підп'ятник Вимикачами 34 підсилювачі 33 відключають від п'єзоелектричних двигунів 10 Включають пристрій стабілізації Виконують пуск підпрограми "Настроювання" обчислювача 29 Напруга, що відповідає величині Zp регулируемого зазора 18 під датчиком 19 величини регулируемого зазора (Фіг 4) з вимірювача 26 надходить в обчислювач 29, де з заданною частотою перетворюється в двійковий код Крім того, Zp у десятичному коді відображається на екрані дисплея Вибирають один із компенсаторів 8 осьового зміщення вала 1 і вибирають перший п'єзоелектричний регулятор 9 тиска цього компенсатора 8 За допомогою регулировочного гвинта 16 зміщують п'єзоелектричний двигун 10 цього регулятора 9 з встановленою на ньому голкою 11 і перекривають подводящий канал 12 газа Подають газ в камеру 7 піддува першого п'єзоелектричного регулятора 9 тиска данного компенсатора 8 Регуліровочним гвинтом 16 переміщують голку 11 в зворотному напрямку і відкривають подводящий канал 12 газа Тиск газа на виході подводящего канала 12 збільшується і зміщує вал 1 В результаті змінюється величина Zp регулируемого зазора 18 Враховують з екрана дисплея Zpmm при зміщенні вала 1 в напрямку датчика 19 (Фіг 4) або Zpmax при зміщенні вала 1 від нього і визначають середину 51488 8 діапазони величини зміщення вала 1 першим п'єзоелектричним регулятором 19 тиска вибраного компенсатора 8 осьового зміщення вала ^-pmax ^-p -pmin Зміщують гвинтом 16 п'єзоелектричний двигун 10 і, якщо регуліруємий зазор 18 збільшувався, установлюють його так, щоб величина регуліруємого зазора 18 стала рівною Z c p = Z p + AZP Якщо регуліруємий зазор 18 зменшувався, величину зазора 18 установлюють рівною Zcp=Zp-AZp3 Фіксують положення п'єзоелектричного двигуна 10 у цьому положенні і знімають тиск піддува з першого п'єзоелектричного регулятора 9 тиска данного компенсатора 8 Описані вище дії послідовно виконують для усіх п'єзоелектричних регуляторів 9 тиска обох компенсаторів 8 осьового зміщення вала 1 В результаті усі п'єзоелектричні регулятори 9 тиска компенсаторів 8 осьового зміщення будуть установлені на середину діапазона аміни їх підйомних сил (при рівності нулю сигналів управління на п'єзоелектричних двигунах 10 п'єзоелектричних регуляторів 9) Працює пристрій стабілізації осьового положення плоскості планшайби аеростатичної шпиндельної опори наступним чином Подають тик піддува в аеростатичну шпиндельну опору і в камери піддува 7 п'єзоелектричних регуляторів 9 тиска компенсаторів 8 осьового зміщення вала 1 Величини регулируемого зазора 18, контрольного 23 і зазора корекції 25 безперервно перетворюються вимірювачами 26-27 і 28 в напруги, що відповідають величинам цих зазорів, надходять в обчислювач 29 і з встановленої частотою перетворюються їм в цифрові ДВІЙКОВІ коди Виконують пуск підпрограми "Стабілізація" обчислювача 29 і вимикачами 34 підключають підсилювачі 33 до п'єзоелектричних двигунів 10 регуляторів 9 тиска компенсаторів 8 осьового зміщення вала 1 В момент пуска підпрограми "Стабілізація" обчислювач 29 запам'ятовує код "Ьі," величини регуліруємого зазора, код "Ьг" величини зазора корекції і код "Ьз" величини контрольного зазора в якості їх початкових значень Ь-і/0/, Ьг/О/, Ьз/О/ Крім того, обчислювач 29 перетворює код Ьі/0/ величини регулируемого зазора 18 у відповідну цьому коду напругу, яка надходить на штегріруючій ланцюжок ЗО Згладжена напруга з вихода штегріруючого ланцюжка ЗО надходить на другий вхід диференцируючого підсилювача 31 Одночасно з подачею напруги на штегрируючій ланцюжок ЗО обчислювач 29 видає сигнал на електронний ключ 32 і відкриває його Напруга, що відповідає поточному значенню величини регулируемого зазора 18 з вимірювача 26 величини регулируемого зазора надходить на перший вхід диференциального підсилювача 31 Якщо поточне значення Ьі величини регулируемого зазора 18 дорівнює початковому Ь-і/0/, сигнали на входах диференциального підсилювача 31 рівні Отже потенціали йог виходів також рівні Тому різниця 51488 потенціалів між виходами підсилювачів 33 також дорівнює нулю При відхиленні поточного значення Ьі величини регуліруємого зазора 18 від початкового, між входами диференціального підсилювача 3 1 , а, отже, і між виходами підсилювачів 33 виникає різниця потенціалів, яка прикладається до п'єзоелектричних регуляторів 9 тиска компенсаторів 8 осьового зміщення вала 1 Причому, п'єзоелектричні регулятори 9 тиска, що розташовані в перерізе по А-А (Фіг 4) і п'єзоелектричні регулятори 9 тиска, що розташовані в перерізі по Б-Б, до виходів підсилювачів 33 підключені в протифазі так що, якщо регуліруємий зазор 18 збільшився, п'єзоелектричні двигуни 10 в перерізі по А-А привідкривають канали 12, що підводять газ, а в перерізі по Б-Б призакривають ці канали 12 Під дією різниці тисків в зазорах 12 компенсаторів 8 осьового зміщення вал 1 буде зміщуватися до момента виконання рівності bi=b-i/O/ При цьому різниця потенціалів між виходами підсилювачів 33 стає рівною нулю і зміщення вала 1 припиняється Періодично, з заданим інтервалом часу At обчислювач 29 порівнює величину Ь2, зазора 25 корекції і величину Ьз контрольного зазора з їх початковими значеннями Ь2/0/ і Ьз/О/ Якщо Ь2^Ь2/О/, змінилась довжина відрізка вала 1 (Фіг 3), що ле 10 жить нижче плоскості симетрії п'яти 3 Обчислювач 29 у ВІДПОВІДНОСТІ з підпрограмою "Стабілізація" обчислює різність ДЬ2=Ь2-Ь2(О) і запам'ятовує нове значення зазора 25 корекції Ь2(0) = b 2 l Порівнюється Ьз з Ьз/О/ Якщо Ьз^Ьз/О/, змінилась довжина відрізка вала, що лежить вище плоскості симетрії п'яти 3 Обчислюється різниця ДЬз=Ьз-Ь3(О) і запам'ятовується нове значення контрольного зазора 22 Ь3(0) =Ь 3 Обчислюється скоректоване значення ЬіСКор величини регуліруємого зазора 18 ЬіскоР=Ьі(0)-ДЬ2-ЛЬз, яке перетворюється в напругу, що надходить на другий вхід диференціального підсилювача 31 В результаті пристрій стабілізації буде зберігати постійним нове значення bi=biCKop величини регуліруємого зазора 18, яке відповідає незміщеному положення планшайби 2 1 , а, отже, стабілізувати и положення при дії на аеростатичну шпиндельну опору осьових збурюючих дії і при ЗМІНІ температурного поля вала 1 цієї опори 11 51488 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 12
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for stabilization of axial position of the faceplate plane of aerostatic spindle support
Автори англійськоюZinenko Volodymyr Mykolaiovych
Назва патенту російськоюУстройство стабилизации осевого положения плоскости планшайбы аэростатической шпиндельной опоры
Автори російськоюЗиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06
Мітки: положення, пристрій, аеростатичної, шпиндельної, планшайби, площині, стабілізації, осьового, опори
Код посилання
<a href="https://ua.patents.su/6-51488-pristrijj-stabilizaci-osovogo-polozhennya-ploshhini-planshajjbi-aerostatichno-shpindelno-opori.html" target="_blank" rel="follow" title="База патентів України">Пристрій стабілізації осьового положення площини планшайби аеростатичної шпиндельної опори</a>
Пристрій суміщення вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори
Номер патенту: 36956
Опубліковано: 16.04.2001
Автори: Шепелєв Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: B23B 25/00
Мітки: опори, обертання, вершини, вала, шпиндельної, аеростатичної, різця, пристрій, віссю, алмазного, суміщення
Текст:
...такій величині зміщення зміною відстані між плоским провідником 9 і вершиною 13 голки можно нехтувати. Тому вершина 13 і плоский провідник 9 у еквівалентній схемі вважаються нерухомими. Тоді рухомим елементом у еквівалентній схемі вважається алмазний різець (кристал алмаза). Причому, точки задньої грані 15 різця в силу близкості до вершини 13 лежать в області сильного електричної о поля. Отже навіть незначна зміна відстані між точкою на...
Пристрій стабілізації положення рухомого елемента плоскої аеростатичної опори
Номер патенту: 17152
Опубліковано: 18.03.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 32/06
Мітки: опори, пристрій, стабілізації, плоскої, елемента, рухомого, положення, аеростатичної
Формула / Реферат:
Устройство стабилизации положения подвижного элемента плоской аэростатической опоры, включающей подвижный и неподвижный элементы плоской аэростатической опоры и регуляторы положения подвижного элемента плоской аэростатической опоры, отличающееся тем, что неподвижный элемент плоской аэростатической опоры состоит из двух оснований со встроенными в них жиклерами подачи газа в зазоре между этими основаниями и размещенным между ними подвиж-ным...
Пристрій компенсації гіроскопічного моменту обертового елемента, наприклад, вала аеростатичної шпиндельної опори
Номер патенту: 25540
Опубліковано: 30.10.1998
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 32/06
Мітки: обертового, моменту, пристрій, вала, гіроскопічного, опори, аеростатичної, наприклад, компенсації, шпиндельної, елемента
Формула / Реферат:
1. Устройство компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержащее датчики величины смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы смещения оси...
Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори
Номер патенту: 36959
Опубліковано: 16.04.2001
Автори: Зіненко Володимир Миколайович, Шепелєв Анатолій Олександрович
МПК: B23Q 17/00
Мітки: опори, віссю, шліфувальною, шпиндельної, поверхнею, суміщення, нижньої, вала, пристрій, обертання, дугоподібною, точки, шліфувального, круга
Текст:
...обмежувач 13 зворотного переміщення рухомої пластини 4. Обмежувач 13 зворотного переміщення призначений для обмеження величини переміщення ру 2 36959 хомої пластини 4 електромагнітом 14, зв'язаним з нею пружиною 15. Це обмежує величину деформації плоскої пружини 11, а отже, обмежує величину її залишкової деформації. Зміщення рухомої пластини 4 електромагнітом 14 необхідно для її відведення від п'єзоелемента 10. У результаті випрямлення...
Спосіб стабілізації положення рухомого елемента плоскої пружної опори та пристрій для його реалізації

Номер патенту: 41506
Опубліковано: 17.09.2001
Автори: Шепелєв Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: елемента, положення, опори, стабілізації, пружної, реалізації, пристрій, плоскої, рухомого, спосіб
Формула / Реферат:
1. Спосіб стабілізації положення рухомого елемента плоскої пружної опори, який включає регулювання величин зазорів між основами плоскої пружної опори і поверхнею рухомого елемента, який відрізняється тим, що в основі плоскої пружної опори встановлюють обмежену множину Q датчиків величин зазорів, основи яких розміщують у площині згаданої основи плоскої пружної опори, причому, датчики величин зазорів встановлюють по "n" лініям...
Попередній патент: Склад цукру з функціональними властивостями
Наступний патент: Спосіб використання термальної води з вмістом горючих газів
Випадковий патент: Спосіб діагностики розвитку атеросклерозу