Радіотехнічна навігаційно-посадкова система з активним запитом-відповіддю
Номер патенту: 76868
Опубліковано: 25.01.2013
Автори: Фіалкіна Тетяна Станіславівна, Кондрашов Віктор Іванович, Кондрашов Ярослав Вікторович, Туренко Дар'я Миколаївна
Формула / Реферат
Радіотехнічна навігаційно-посадкова система з активним запитом-відповіддю, що складається з наземної та бортової частини, наземна частина містить три далекомірні радіомаяки, які розміщують в площині злітно-посадкової смуги, а бортова частина містить послідовно з'єднані антену, антенний перемикач, передавач, модулятор і шифратор, приймач, перший вхід якого підключений до другого виходу антенного перемикача, гетеродин, перший і другий виходи якого підключені до других входів приймача і передавача відповідно, перший і другий блоки перетворення, індикатор відхилення, перший індикатор дальності і обчислювач, перший, другий і третій виходи якого підключені до відповідних входів першого індикатора дальності, першого і другого блоків перетворення, виходи яких з'єднані відповідно з першим і другим входами індикатора відхилень, а також вимірювач дальності, яка відрізняється тим, що далекомірні маяки розташовуються у вершині трикутника, який розміщений у площині злітно-посадкової смуги з відстанями між базами радіомаяків від 20 ![]() до 200
до 200 ![]() , де
, де ![]() - середньоквадратична похибка виміру похилої дальності навігаційно-посадковою системою, а центр ваги трикутника розташований у будь-якій точці кола радіусом не більше 200
- середньоквадратична похибка виміру похилої дальності навігаційно-посадковою системою, а центр ваги трикутника розташований у будь-якій точці кола радіусом не більше 200 ![]() з центром в опорній точці злітно-посадкової смуги, а в бортову частину введені аналоговий обчислювач, пристрій вводу-виводу, пристрій управління і другий індикатор дальності, при цьому вихід приймача з'єднаний з першим входом аналогового обчислювача, другий вхід якого з'єднаний з першим виходом пристрою вводу-виводу, а вихід - до входу вимірювача дальності, вихід якого з'єднаний з першим входом пристрою вводу-виводу, другий вхід якого з'єднаний з четвертим виходом обчислювача, другий, третій, четвертий і п'ятий виходи пристрою вводу-виводу підключені відповідно до входу гетеродину, входу шифратора, першого виходу обчислювача і третього входу приймача, другий, третій, четвертий та п'ятий входи обчислювача з'єднані відповідно з першим, другим, третім та четвертим виходами пристрою управління, а п'ятий вихід обчислювача - з входом другого індикатора дальності.
з центром в опорній точці злітно-посадкової смуги, а в бортову частину введені аналоговий обчислювач, пристрій вводу-виводу, пристрій управління і другий індикатор дальності, при цьому вихід приймача з'єднаний з першим входом аналогового обчислювача, другий вхід якого з'єднаний з першим виходом пристрою вводу-виводу, а вихід - до входу вимірювача дальності, вихід якого з'єднаний з першим входом пристрою вводу-виводу, другий вхід якого з'єднаний з четвертим виходом обчислювача, другий, третій, четвертий і п'ятий виходи пристрою вводу-виводу підключені відповідно до входу гетеродину, входу шифратора, першого виходу обчислювача і третього входу приймача, другий, третій, четвертий та п'ятий входи обчислювача з'єднані відповідно з першим, другим, третім та четвертим виходами пристрою управління, а п'ятий вихід обчислювача - з входом другого індикатора дальності.
Текст
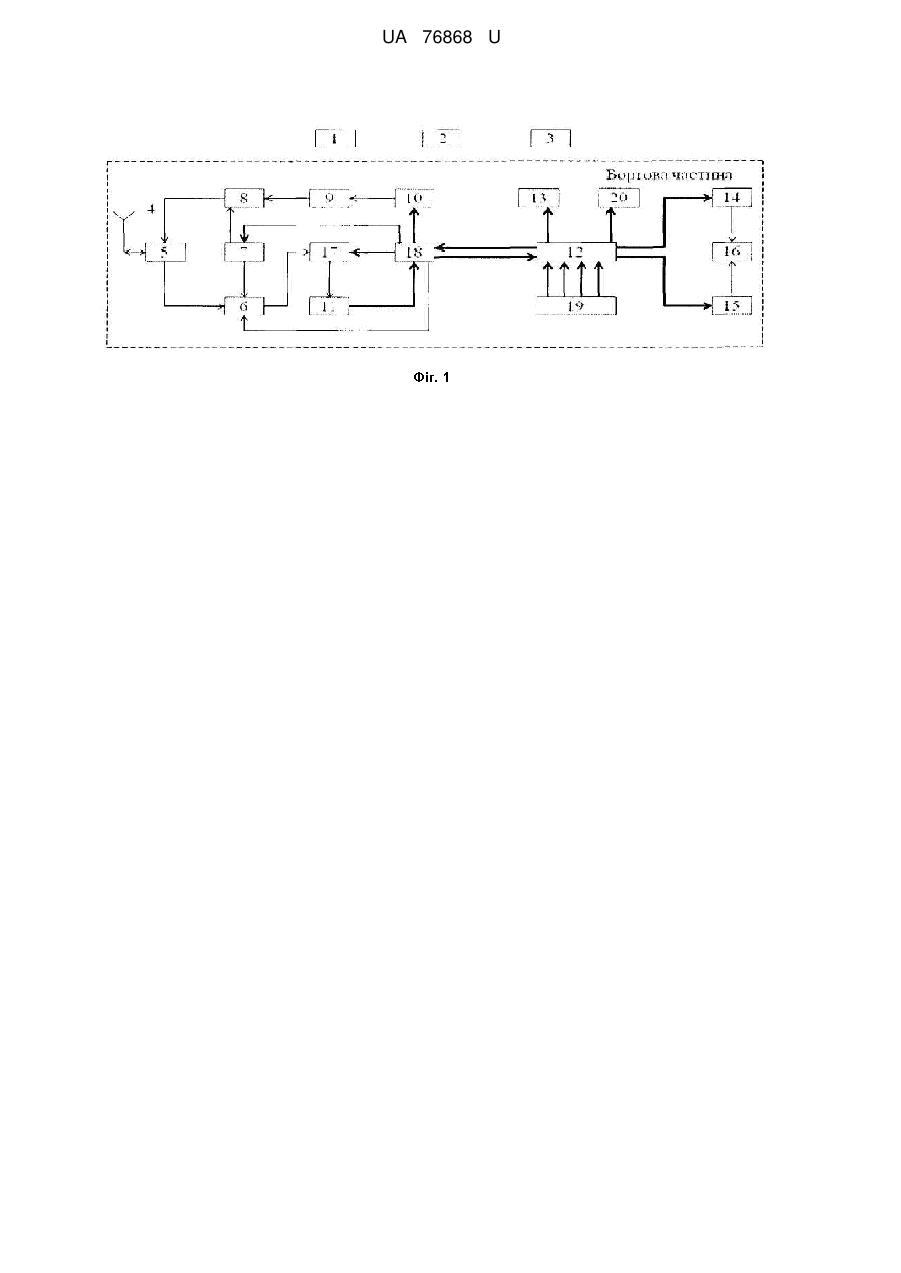
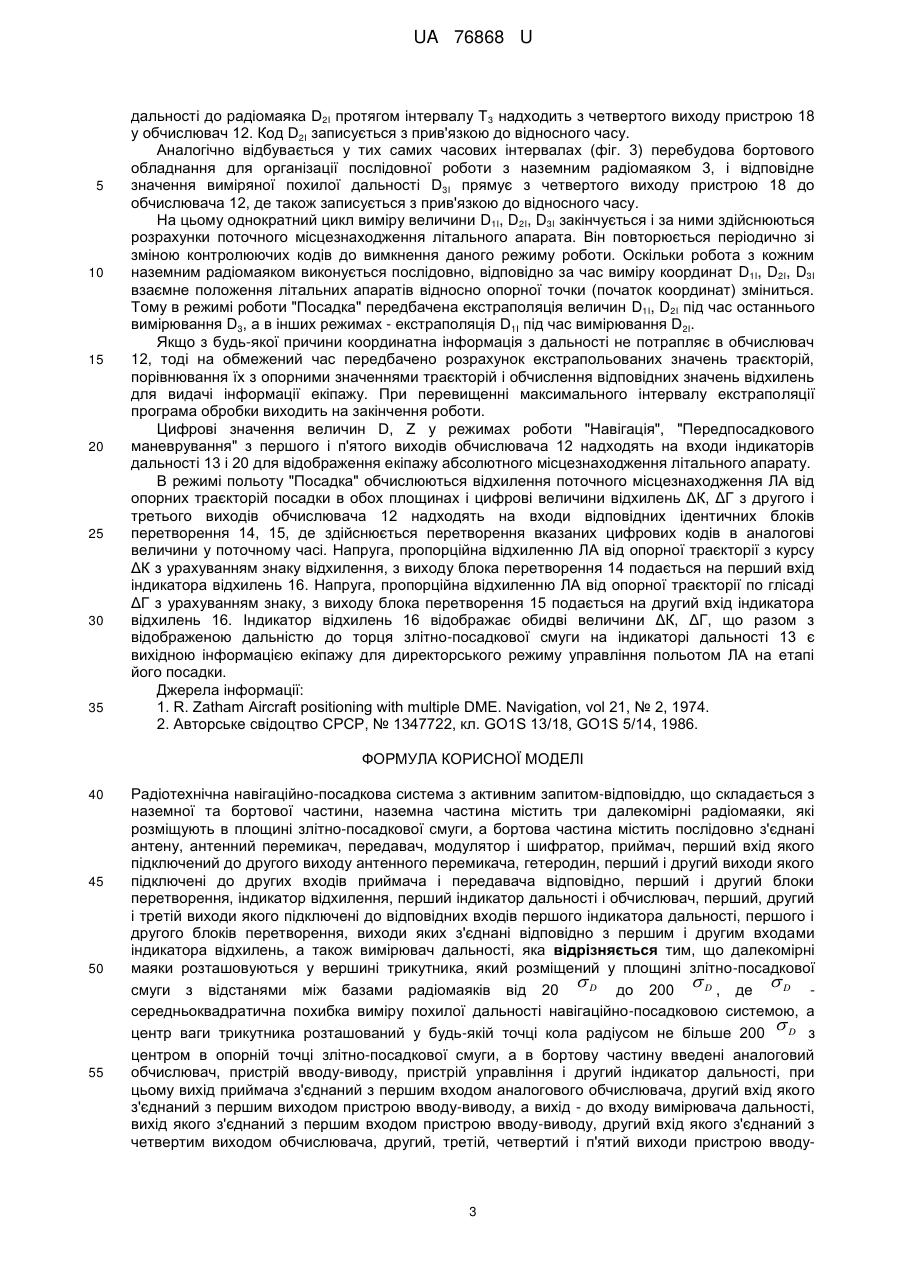
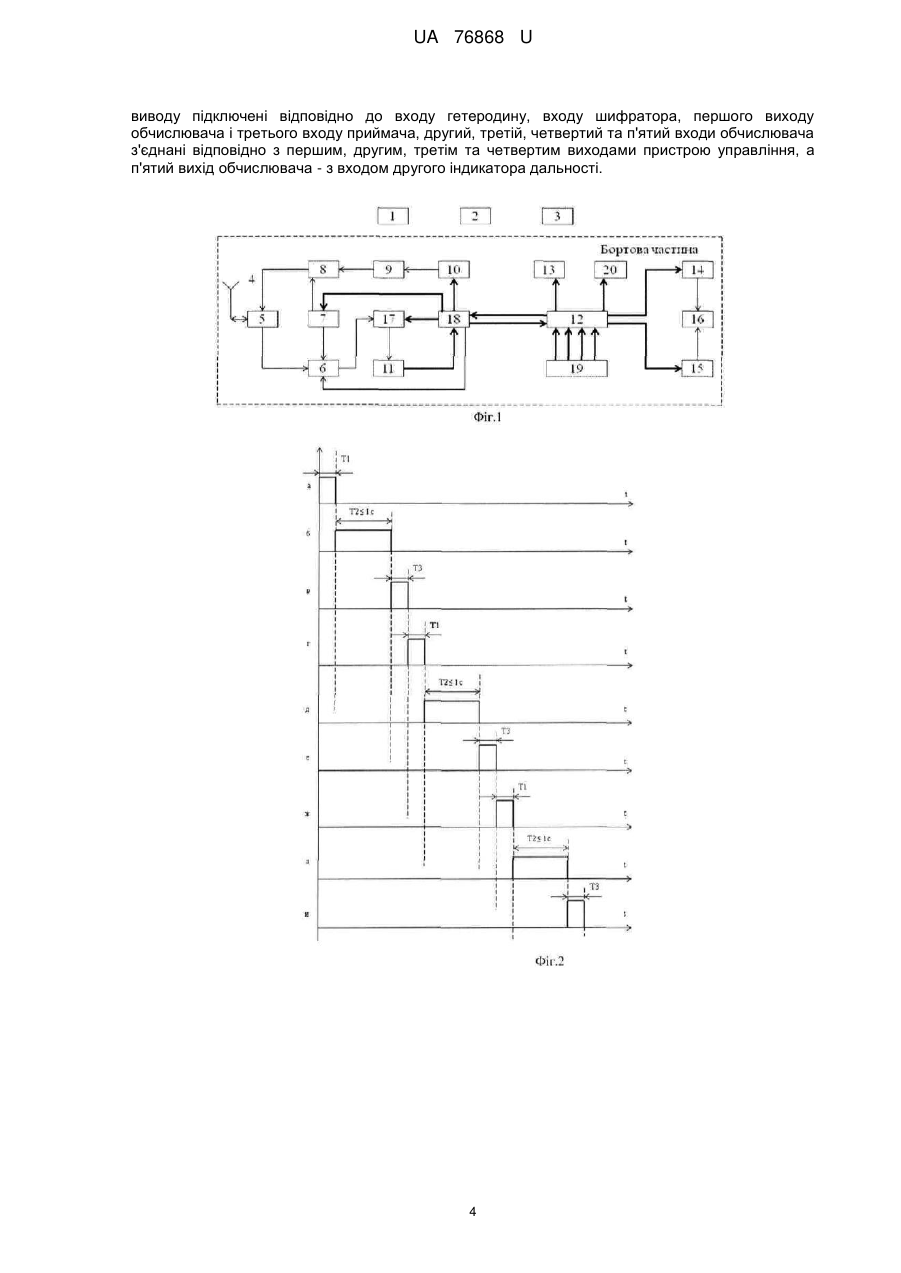
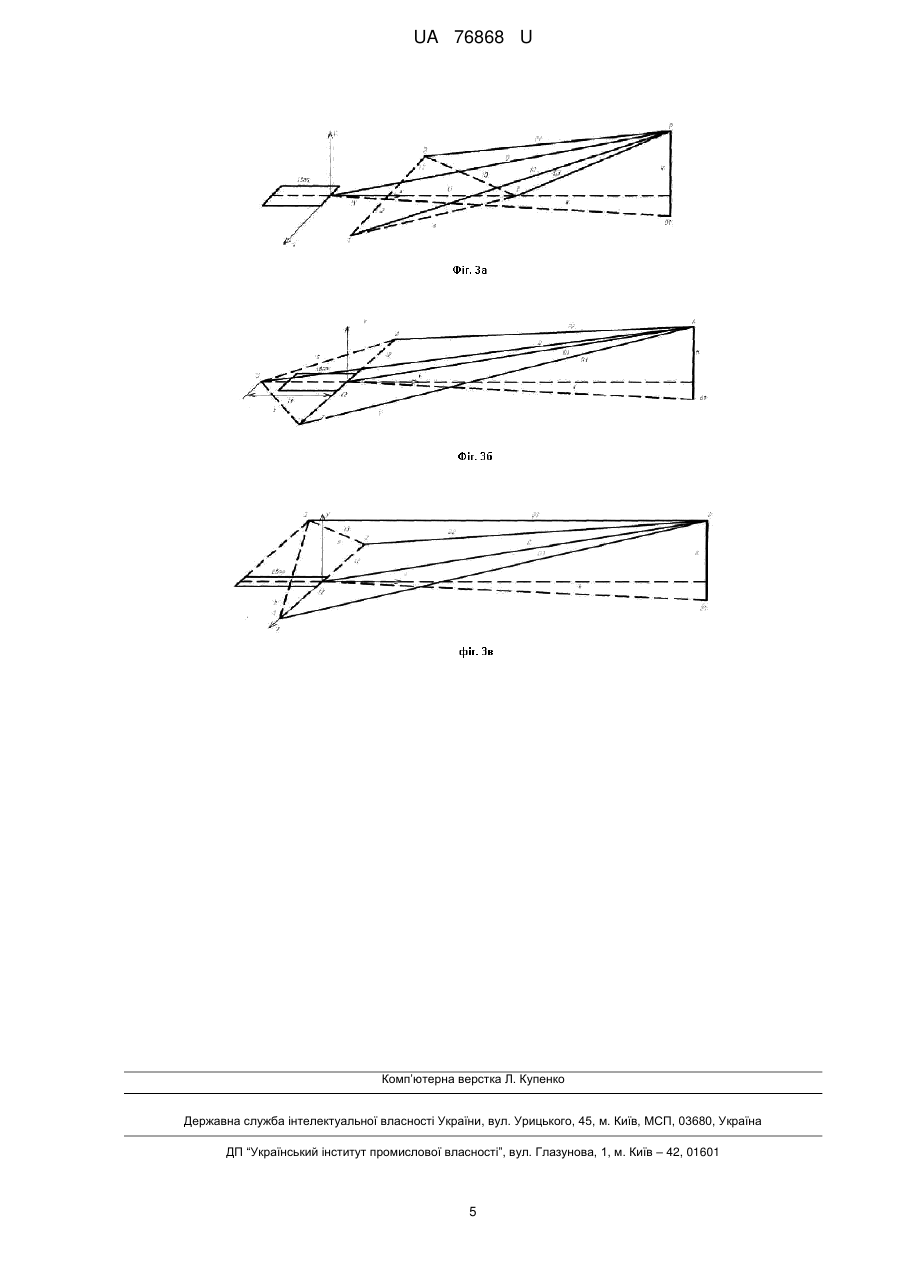
Реферат: Радіотехнічна навігаційно-посадкова система з активним запитом-відповіддю складається з наземної та бортової частин, наземна частина містить три далекомірні радіомаяки, які розміщують в площині злітно-посадкової смуги. Бортова частина містить послідовно з'єднані антену, антенний перемикач, передавач, модулятор і шифратор, приймач, перший вхід якого підключений до другого виходу антенного перемикача, гетеродин, перший і другий виходи якого підключені до других входів приймача і передавача відповідно, перший і другий блоки перетворення, індикатор відхилення, перший індикатор дальності і обчислювач, перший, другий і третій виходи якого підключені до відповідних входів першого індикатора дальності, першого і другого блоків перетворення, виходи яких з'єднанні відповідно з першим і другим входами індикатора відхилень, а також вимірювач дальності. Далекомірні маяки розташовуються у вершині трикутника, який розміщений у площині злітно-посадкової смуги з відстанями між D до 200 D , де D - середньоквадратична похибка виміру базами радіомаяків від 20 похилої дальності навігаційно-посадковою системою. Центр ваги трикутника розташований у будь-якій точці кола радіусом не більше 200 D з центром в опорній точці злітно-посадкової смуги. В бортову частину введені аналоговий обчислювач, пристрій вводу-виводу, пристрій управління і другий індикатор дальності. UA 76868 U (54) РАДІОТЕХНІЧНА НАВІГАЦІЙНО-ПОСАДКОВА СИСТЕМА З АКТИВНИМ ЗАПИТОМ-ВІДПОВІДДЮ UA 76868 U UA 76868 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі радіонавігації та може бути використана для обладнання аеродромів, посадкових смуг і трас, також повітряних суден (ПС), відповідно наземним та бортовим обладнанням. Відомі навігаційно-посадкові системи на основі послідовних вимірювань дальності до кожного наземного стандартного радіомаяка (DME маяк). Вони використовують виміри значень дальності від ПС до кожного заздалегідь вибраного радіомаяка, який знаходиться в зоні дії системи, дозволяють визначити його місцезнаходження в горизонтальній площині з точністю менше 100 м. Такі системи не забезпечують визначення місцезнаходження ПС у вертикальній площині, що призводить до того, що задача посадки залишається не вирішеною. З відомих систем найбільш близьким за технічною суттю до корисної моделі є навігаційнопосадкова система з активним запитом-відповіддю, наземне обладнання якої складає три стандартних радіомаяки DME, а бортове обладнання містить антену і антенний перемикач, приймач, гетеродин, вимірювач дальності DME, передавач, модулятор, шифратор, індикатор дальності, синхронізатор, обчислювач, два блоки перетворення і індикатор відхилень, причому антена з'єднана входом-виходом з антенним перемикачем, другий вихід якого з'єднаний з першим входом приймача, другий вхід якого підключений до першого виходу гетеродину, а вихід - до входу вимірювача дальності DME; другий вихід гетеродина з'єднаний з другим входом передавача, перший вхід якого підключений до виходу модулятора, а вихід - до другого входу антенного перемикача; перший і другий виходи синхронізатора з'єднані відповідно з входами гетеродина та входом шифратора, вихід якого підключений до входу модулятора, а третій, четвертий і п'ятий виходи синхронізатора з'єднані відповідно з першим, другим та третім входами обчислювального пристрою; вихід вимірювача дальності DME підключений до четвертого входу обчислювального пристрою, перший вихід якого з'єднаний з входом індикатора дальності, другий і треті виходи підключені відповідно до входів блоків перетворення, виходи яких з'єднані відповідно з першим та другим входами індикатора відхилень. Відсутність вибору оптимального розташування далекомірних радіомаяків з критерію точності, недостатня точність виміру дальності минулим поколінням бортових штатних далекомірів СД-75, великий часовий інтервал перебудови бортових далекомірів СД-75 на наступний частотно-кодовий канал для взаємодії з наступним наземним далекомірним радіомаяком, який складає 4 с, спричиняють обмежену точність вирішення задачі навігації, передпосадкового маневрування і посадки ПС. Також необхідно зазначити, що на етапах навігації і передпосадкового маневрування ПС зазначений склад інформації не повністю задовольняє екіпаж, оскільки йому необхідне знання абсолютного місцезнаходження ПС у горизонтальній площині, що не забезпечується апаратно-програмними засобами прототипу. Задачею винаходу є забезпечення радіотехнічною інформацієюлітальні апарати (ЛА) для задач навігації, передпосадкового маневрування та посадки за допомогою стандартної наземної та бортової далекомірної апаратури та збільшення точності визначення місцезнаходження ЛА в горизонтальній та вертикальній площині. Поставлена задача вирішується тим, що в радіотехнічну навігаційно-посадкову систему, що складається з наземного та бортового обладнання, в якій наземне обладнання являє собою три далекомірних радіомаяки, згідно з винаходом, використано їхнє знаходження у площині злітноD посадкової смуги у вершинах трикутника з відстанню між радіомаяками не менш 20 не D більше 200 , при чому в кожному пункті знаходження ці відстані між радіомаяками можуть відрізнятися не більше, ніж в 5 разів, а центр ваги трикутника може лежати в будь-якій точці D D кола радіусом не більше 200 , з центром в опорній точці злітно-посадковій смуги, де середньоквадратична похибка виміру похилої дальності радіотехнічною системою, а в бортовому обладнанні, в якому розташована антена, антенний перемикач, приймач, гетеродин, передавач, модулятор, шифратор, вимірювач дальності, обчислювач, індикатор дальності, згідно з винаходом, знаходиться аналоговий обчислювач, пристрій вводу-виводу, пристрій управління і другий індикатор дальності. При цьому вихід приймача з'єднаний з першим входом аналогового обчислювача, другий вхід якого з'єднаний з першим виходом пристрою вводувиводу, а вихід - до входу вимірювача дальності, вихід якого з'єднаний з першим входом пристрою вводу-виводу, другий вхід якого з'єднаний з четвертим виходом обчислювача, другий, третій, четвертий і п'ятий виходи пристрою вводу-виводу підключені відповідно до входу гетеродину, входу шифратора, першого виходу обчислювача і третього входу приймача, другий, третій, четвертий та п'ятий входи обчислювача з'єднані відповідно з першим, другим, третім та 1 UA 76868 U 5 10 15 20 25 30 35 40 45 50 55 60 четвертим виходами пристрою управління, а п'ятий вихід обчислювача - з входом другого індикатора дальності. Використання стандартної, регламентованої ІСАО далекомірної системи DME/P нового покоління та введення у бортове обладнання аналогового обчислювача, пристрою вводувиводу, пульту управління і додатково індикатора дальності при відповідному їхньому взаємозв'язку та відповідному програмному забезпеченні відрізняє запропоновану радіотехнічну навігаційно-посадкову систему з активним запитом-відповіддю від прототипу, оскільки здійснюється можливість одним і тим же складом апаратури вирішувати по команді екіпажу задачі навігації, передпосадкового маневрування і посадки повітряних суден з точністю, яка дозволяє перейти до посадки з II категорії ІСАО. На фіг. 1 зображена структурна електрична схема пропонованої системи; на фіг. 2 зображена часова діаграма роботи системи; на фіг. 3 (а, б, в) - приклади розташування наземного обладнання. Пристрій складається з наземної частини, яка має в своєму складі три далекомірних радіомаяки 1, 2 та 3, і бортової частини, яка складається з антени 4, антенного перемикача 5, приймача 6, гетеродина 7, передавача 8, модулятора 9, шифратора 10, вимірювача дальності 11, обчислювача 12, першого індикатору дальності 13, першого блоку перетворень 14, другого блоку перетворень 15, індикатору відхилень 16, аналогового обчислювача 17, пристрою вводувиводу 18, пристрою управління 19, другого індикатора дальності 20. На фіг. 3 (а, б, в) зображені приклади розташування радіомаяка, де х, у, z - прямокутна система координат, прив'язана до торця злітно-посадкової смуги (ЗПМ); 0 - точка поточного місцезнаходження ЛА; 1, 2, 3 - місця знаходження радіомаяків 1, 2, 3; I1 - фіксована відстань від торця ЗПМ до бази радіомаяків 1, 2; I2 - фіксована величина половини бази радіомаяків 1, 2 (за умови їхнього симетричного розташування відносно продовження осі ЗПМ; I3 - фіксована відстань від торця ЗПМ до радіомаяка 3; L ЗПМ - довжина ЗПМ; a, b - фіксовані значення без радіомаяків 2,3 та 1,3; D1, D2, D3 - вимірювальні поточні значення похилих дальностей от ЛА до радіомаяків; D, Н, Z, К, Г - координати обчислюваного місцезнаходження ЛА у системі координат, прив'язаній у ЗПМ; O1 - проекція на площину, в якій знаходиться ЗПМ. Система працює таким чином. При включенні системи на борту літального апарату відповідно до карти польоту здійснюється вибір з пристрою управління 19 наступної інформації: режим роботи "Навігація", "Передпосадкове маневрування", "Посадка"; номери програми частотно-кодових каналів (ЧКК) даного пункту розміщення наземних радіомаяків; номери програми опорних траєкторій (в режимі "Посадка"), Вказана контролююча інформація прямує до обчислювача 12, з котрого спочатку вибирається парне конкретне значення ЧКК і формується контролююче слово, яке стандартним 32-розрядним послідовним біполярним кодом прямує до другого входу в пристрій вводу-виводу 18. Відповідно, протягом інтервалу Т 1 (фіг. 3, а) здійснюється утворення та прийом контролюючого слова для організації роботи бортового обладнання з наземним радіомаяком 1. Протягом часового інтервалу T 2 (фіг. 3) відбувається перебудова шифратору 10 з третього виходу пристрою 18, гетеродину 7 з другого виходу пристрою 18, високочастотного фільтру у приймачі 6 з п'ятого виходу пристрою 18 та дешифратора 10 в аналоговому обчислювачі 17 з першого виходу пристрою 18. Після перебудови здійснюється вимір похилої дальності D 1 до радіомаяка 1. Дане поточне виміряне значення D 1I яке вже є опосередкованим у вимірювачі дальності 11 за результатами декількох запитів, передається протягом інтервалу T 3 (фіг. 3, в) у вигляді послідовного 32-розрядного біполярного коду у обчислювач 12 з четвертого виходу пристрою 18. В подальшому, відбувається запис коду D 1I у обчислювач 12 з прив'язкою до відносного часу. Наступним кроком, відповідно до програми установки ЧКК, здійснюється формування наступного керуючого слова, яке протягом такого ж інтервалу T 1 (фіг. 3, а) за стандартними правилами обміну прямує до другого входу пристрою 18. Протягом часового інтервалу T 2 відбувається наступна перебудова шифратора 10 з третього виходу пристрою 18, гетеродина 7 з другого виходу пристрою 18, високочастотного фільтра у приймачі 6 з п'ятого виходу пристрою 18 та дешифратора в аналоговому обчислювачі 17 з першого виходу пристрою 18 для взаємодії бортового обладнання з наземним радіомаяком 2. Виміряне значення похилої 2 UA 76868 U 5 10 15 20 25 30 35 дальності до радіомаяка D2I протягом інтервалу T3 надходить з четвертого виходу пристрою 18 у обчислювач 12. Код D2I записується з прив'язкою до відносного часу. Аналогічно відбувається у тих самих часових інтервалах (фіг. 3) перебудова бортового обладнання для організації послідовної роботи з наземним радіомаяком 3, і відповідне значення виміряної похилої дальності D3I прямує з четвертого виходу пристрою 18 до обчислювача 12, де також записується з прив'язкою до відносного часу. На цьому однократний цикл виміру величини D1I, D2I, D3I закінчується і за ними здійснюються розрахунки поточного місцезнаходження літального апарата. Він повторюється періодично зі зміною контролюючих кодів до вимкнення даного режиму роботи. Оскільки робота з кожним наземним радіомаяком виконується послідовно, відповідно за час виміру координат D1I, D2I, D3I взаємне положення літальних апаратів відносно опорної точки (початок координат) зміниться. Тому в режимі роботи "Посадка" передбачена екстраполяція величин D1I, D2I під час останнього вимірювання D3, а в інших режимах - екстраполяція D1I під час вимірювання D2I. Якщо з будь-якої причини координатна інформація з дальності не потрапляє в обчислювач 12, тоді на обмежений час передбачено розрахунок екстрапольованих значень траєкторій, порівнювання їх з опорними значеннями траєкторій і обчислення відповідних значень відхилень для видачі інформації екіпажу. При перевищенні максимального інтервалу екстраполяції програма обробки виходить на закінчення роботи. Цифрові значення величин D, Z у режимах роботи "Навігація", "Передпосадкового маневрування" з першого і п'ятого виходів обчислювача 12 надходять на входи індикаторів дальності 13 і 20 для відображення екіпажу абсолютного місцезнаходження літального апарату. В режимі польоту "Посадка" обчислюються відхилення поточного місцезнаходження ЛА від опорних траєкторій посадки в обох площинах і цифрові величини відхилень ΔК, ΔГ з другого і третього виходів обчислювача 12 надходять на входи відповідних ідентичних блоків перетворення 14, 15, де здійснюється перетворення вказаних цифрових кодів в аналогові величини у поточному часі. Напруга, пропорційна відхиленню ЛА від опорної траєкторії з курсу ΔК з урахуванням знаку відхилення, з виходу блока перетворення 14 подається на перший вхід індикатора відхилень 16. Напруга, пропорційна відхиленню ЛА від опорної траєкторії по глісаді ΔГ з урахуванням знаку, з виходу блока перетворення 15 подається на другий вхід індикатора відхилень 16. Індикатор відхилень 16 відображає обидві величини ΔК, ΔГ, що разом з відображеною дальністю до торця злітно-посадкової смуги на індикаторі дальності 13 є вихідною інформацією екіпажу для директорського режиму управління польотом ЛА на етапі його посадки. Джерела інформації: 1. R. Zatham Aircraft positioning with multiple DME. Navigation, vol 21, № 2, 1974. 2. Авторське свідоцтво СРСР, № 1347722, кл. GO1S 13/18, GO1S 5/14, 1986. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 55 Радіотехнічна навігаційно-посадкова система з активним запитом-відповіддю, що складається з наземної та бортової частини, наземна частина містить три далекомірні радіомаяки, які розміщують в площині злітно-посадкової смуги, а бортова частина містить послідовно з'єднані антену, антенний перемикач, передавач, модулятор і шифратор, приймач, перший вхід якого підключений до другого виходу антенного перемикача, гетеродин, перший і другий виходи якого підключені до других входів приймача і передавача відповідно, перший і другий блоки перетворення, індикатор відхилення, перший індикатор дальності і обчислювач, перший, другий і третій виходи якого підключені до відповідних входів першого індикатора дальності, першого і другого блоків перетворення, виходи яких з'єднані відповідно з першим і другим входами індикатора відхилень, а також вимірювач дальності, яка відрізняється тим, що далекомірні маяки розташовуються у вершині трикутника, який розміщений у площині злітно-посадкової D до 200 D , де D смуги з відстанями між базами радіомаяків від 20 середньоквадратична похибка виміру похилої дальності навігаційно-посадковою системою, а D з центр ваги трикутника розташований у будь-якій точці кола радіусом не більше 200 центром в опорній точці злітно-посадкової смуги, а в бортову частину введені аналоговий обчислювач, пристрій вводу-виводу, пристрій управління і другий індикатор дальності, при цьому вихід приймача з'єднаний з першим входом аналогового обчислювача, другий вхід якого з'єднаний з першим виходом пристрою вводу-виводу, а вихід - до входу вимірювача дальності, вихід якого з'єднаний з першим входом пристрою вводу-виводу, другий вхід якого з'єднаний з четвертим виходом обчислювача, другий, третій, четвертий і п'ятий виходи пристрою вводу 3 UA 76868 U виводу підключені відповідно до входу гетеродину, входу шифратора, першого виходу обчислювача і третього входу приймача, другий, третій, четвертий та п'ятий входи обчислювача з'єднані відповідно з першим, другим, третім та четвертим виходами пристрою управління, а п'ятий вихід обчислювача - з входом другого індикатора дальності. 4 UA 76868 U Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюRadio navigation-landing system with active interrogation
Автори англійськоюKondrashov Viktor Ivanovych, Kondrashov Yaroslav Viktorovych, Fialkina Tetiana Stanislavivna, Turenko Daria Mykolaivna
Назва патенту російськоюРадиотехническая навигационно-посадочная система с активным запрос-ответом
Автори російськоюКондрашов Виктор Иванович, Кондрашов Ярослав Викторович, Фиалкина Татьяна Станиславовна, Туренко Дарья Николаевна
МПК / Мітки
МПК: G01S 13/18, G01S 5/14
Мітки: радіотехнічна, система, навігаційно-посадкова, активним, запитом-відповіддю
Код посилання
<a href="https://ua.patents.su/7-76868-radiotekhnichna-navigacijjno-posadkova-sistema-z-aktivnim-zapitom-vidpoviddyu.html" target="_blank" rel="follow" title="База патентів України">Радіотехнічна навігаційно-посадкова система з активним запитом-відповіддю</a>
Фазометр

Номер патенту: 17394
Опубліковано: 15.09.2006
Автори: Рудик Вадим Данилович, Гончар Сергій Феодосійович
МПК: G01R 25/00
Мітки: фазометр
Формула / Реферат:
Фазометр, який містить перший і другий диференціатори, причому входи першого та другого диференціаторів підключені до вхідних каналів фазометра, а їх виходи з'єднані з входами другого та першого підсилювачів-обмежувачів відповідно, які виходами підключені до входів першого тригера, перший і другий детектори, які включені між виходами підсилювачів-обмежувачів і входами схеми співпадання, вихід якої через послідовно з'єднані другий тригер і...
Адаптивна нелінійна система управління
Номер патенту: 44723
Опубліковано: 12.10.2009
Автори: Дибська Ирина Юріївна, Бандура Іван Миколайович, Шпак Ганна Сергіївна
МПК: G05B 13/00
Мітки: система, адаптивна, нелінійна, управління
Формула / Реферат:
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора, вихід якого з'єднаний через регулятор з входом об'єкта управління, вихід якого підключений до першого входу першого...
Система керування безпілотним літальним апаратом
Номер патенту: 58103
Опубліковано: 25.03.2011
Автори: Нгуєн Ван Тхінь, Кулік Анатолій Степанович, Данченко Олександр Вячеславович, Прийменко Катерина Сергіївна, Фірсов Сергій Миколайович
МПК: B64C 21/00
Мітки: керування, літальним, апаратом, система, безпілотним
Формула / Реферат:
Система керування безпілотним літальним апаратом, що містить пристрій управління, електричний привід, з'єднаний з виходом пристрою управління, магнітний курс, висотомір, перший GPS приймач, виходи яких підключені до першого, другого, третього входів пристрою управління відповідно, яка відрізняється тим, що в неї введені перший модуль бездротового зв'язку, вихід якого з'єднаний з четвертим входом пристрою управління, а вхід з'єднаний з другим...
Відмовостійка система з аналізом ресурсу
Номер патенту: 15201
Опубліковано: 15.06.2006
Автори: Дергачов Володимир Андрійович, Кулік Тамара Васильовна, Кулік Анатолій Степанович
МПК: G06F 11/18
Мітки: аналізом, ресурсу, відмовостійка, система
Формула / Реферат:
Відмовостійка система з аналізом ресурсу, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, перший двійковий лічильник, перший і другий елементи АБО, n детекторів фронту, n детекторів спаду, виходи індикації технічного стану, причому вихід і-го блока, що резервується, з'єднаний з першим входом і-го елемента I, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І,...
Система автоматичного позиціювання стола свердлильного верстата
Номер патенту: 45770
Опубліковано: 25.11.2009
Автори: Сукочева Катерина Сергіївна, Симонов Володимир Федорович
МПК: B23Q 5/00
Мітки: система, позиціювання, верстата, стола, свердлильного, автоматичного
Формула / Реферат:
Система автоматичного позиціювання стола свердлильного верстата, що містить задавач і послідовно з'єднані цифро-аналоговий перетворювач, підсилювач потужності, яка відрізняється тим, що в її склад введені датчик положення стола, датчик струму, датчик напруги, двигун, з'єднаний зі столом, мультиплексор, вихід якого через цифровий обчислювач з'єднаний зі входом цифро-аналогового перетворювача, вихід задавача з'єднаний з першим входом...
Попередній патент: Оптоелектронний октаномір
Наступний патент: N-(3,4-диметоксифеніл)-2-{[2-метил-6-(піридин-2-іл)піримідин-4-іл]тіо}ацетамід, що проявляє протисудомну активність
Випадковий патент: Модулятор випрямленої напруги