Спосіб вимірювання параметрів лінеаризованої відносно базового режиму моделі нелінійної динаміки електротехнічних об’єктів
Номер патенту: 78541
Опубліковано: 25.03.2013
Автори: Сільвестров Антон Миколайович, Уманська Катерина Вікторівна, Скринник Олексій Миколайович, Гонтар Максим Миколайович

Формула / Реферат
Спосіб вимірювання параметрів лінеаризованої відносно базового режиму моделі нелінійної динаміки електротехнічних об'єктів, згідно з яким на вхід об'єкта подають такий тестуючий сигнал, за якого забезпечується лінійна незалежність змінних стану лінеаризованої моделі, які реєструють, за відповідної умови близькості змінних стану об'єкта і моделі однозначно визначають зміщені (внаслідок впливу нелінійності об'єкта) оцінки параметрів лінеаризованої моделі, який відрізняється тим, що проводять два або більше подібних між собою експерименти з різними амплітудами (потужностями) тестуючого сигналу, визначають для кожного експерименту зміщені, внаслідок впливу нелінійності об'єкта, оцінки параметрів лінеаризованої моделі, для оцінок кожного параметра лінеаризованої моделі будують регресійну залежність від амплітуди (потужності) тестуючого сигналу і, прогнозуючи ці регресивні залежності в точку нульових амплітуд цих сигналів, отримують незміщені оцінки параметрів.
Текст
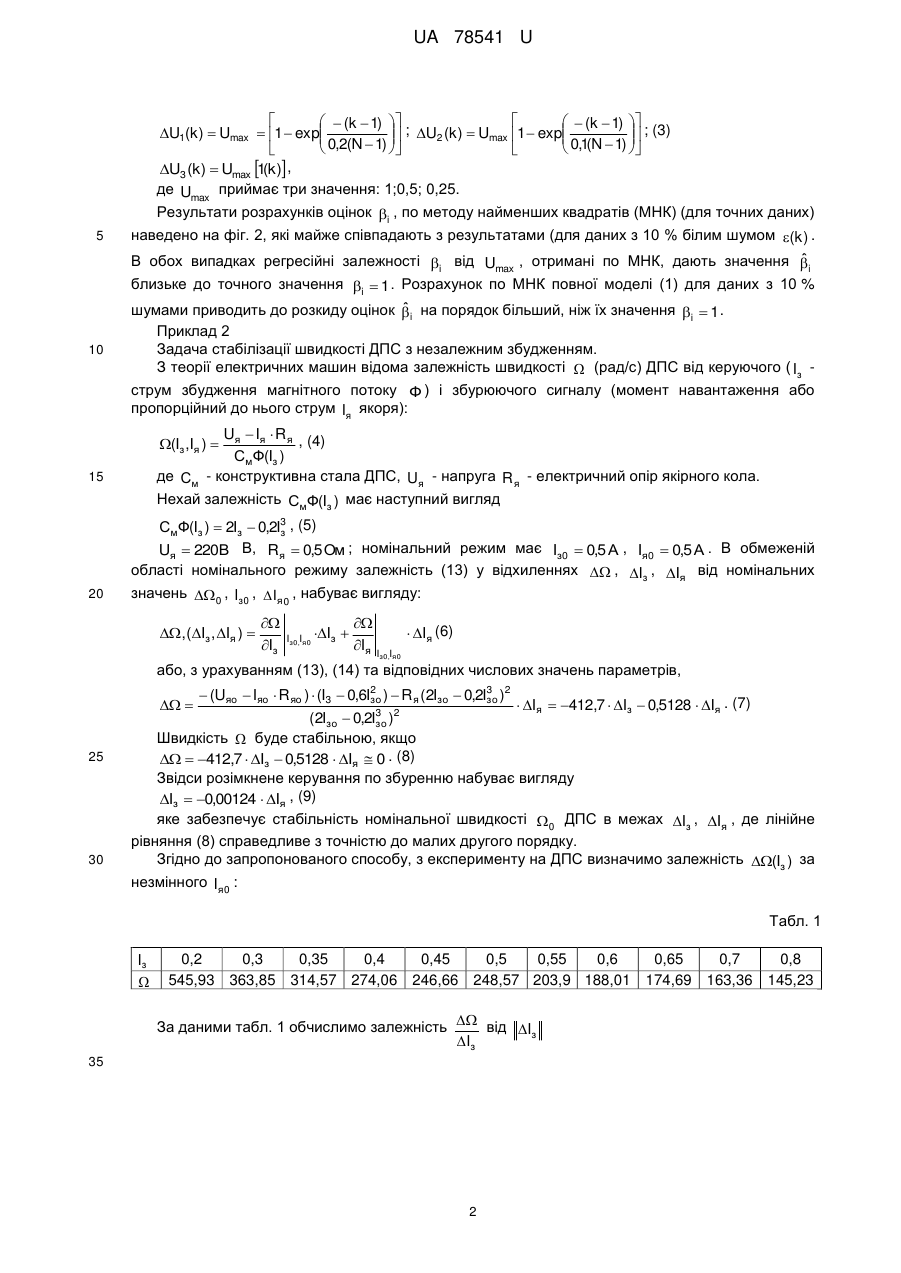
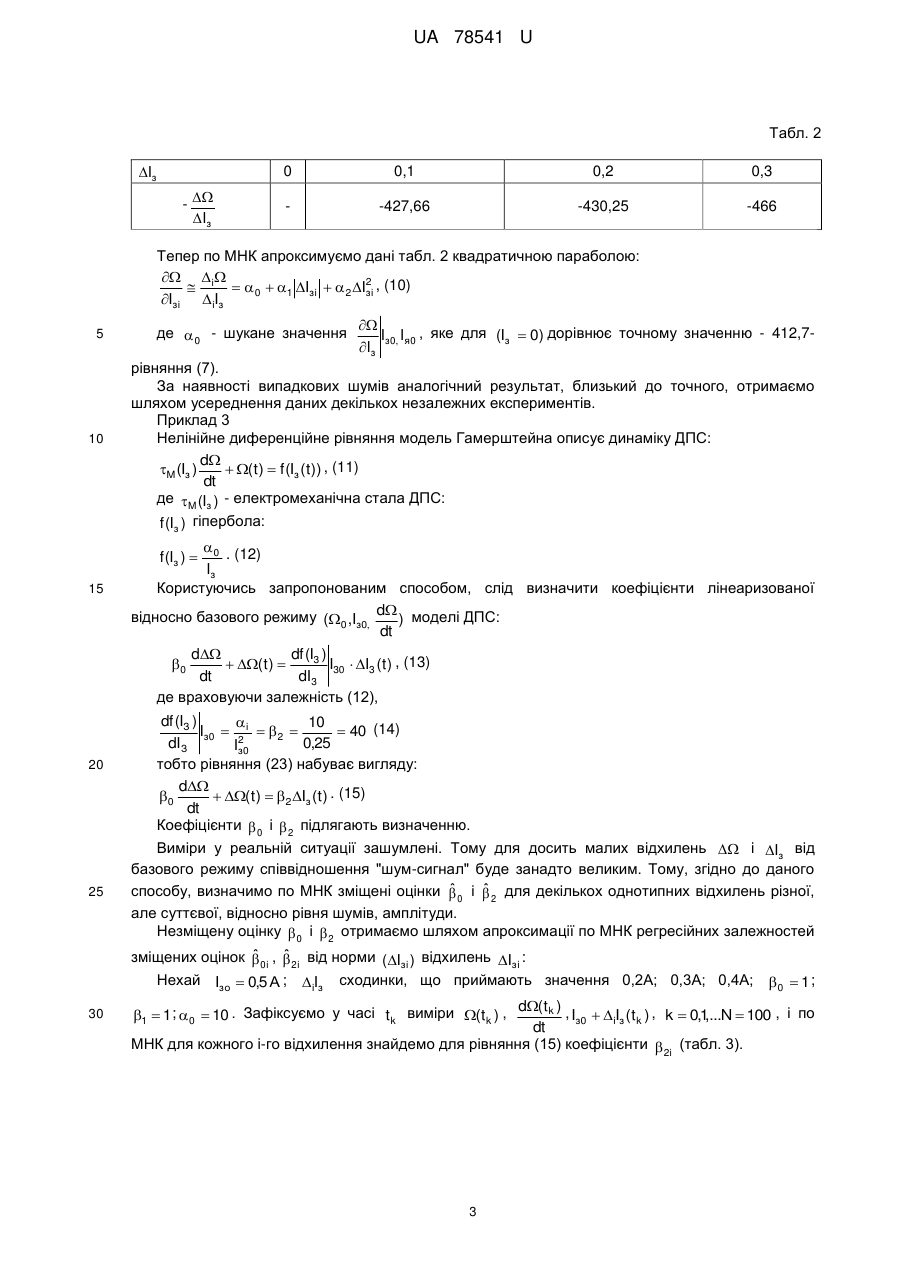
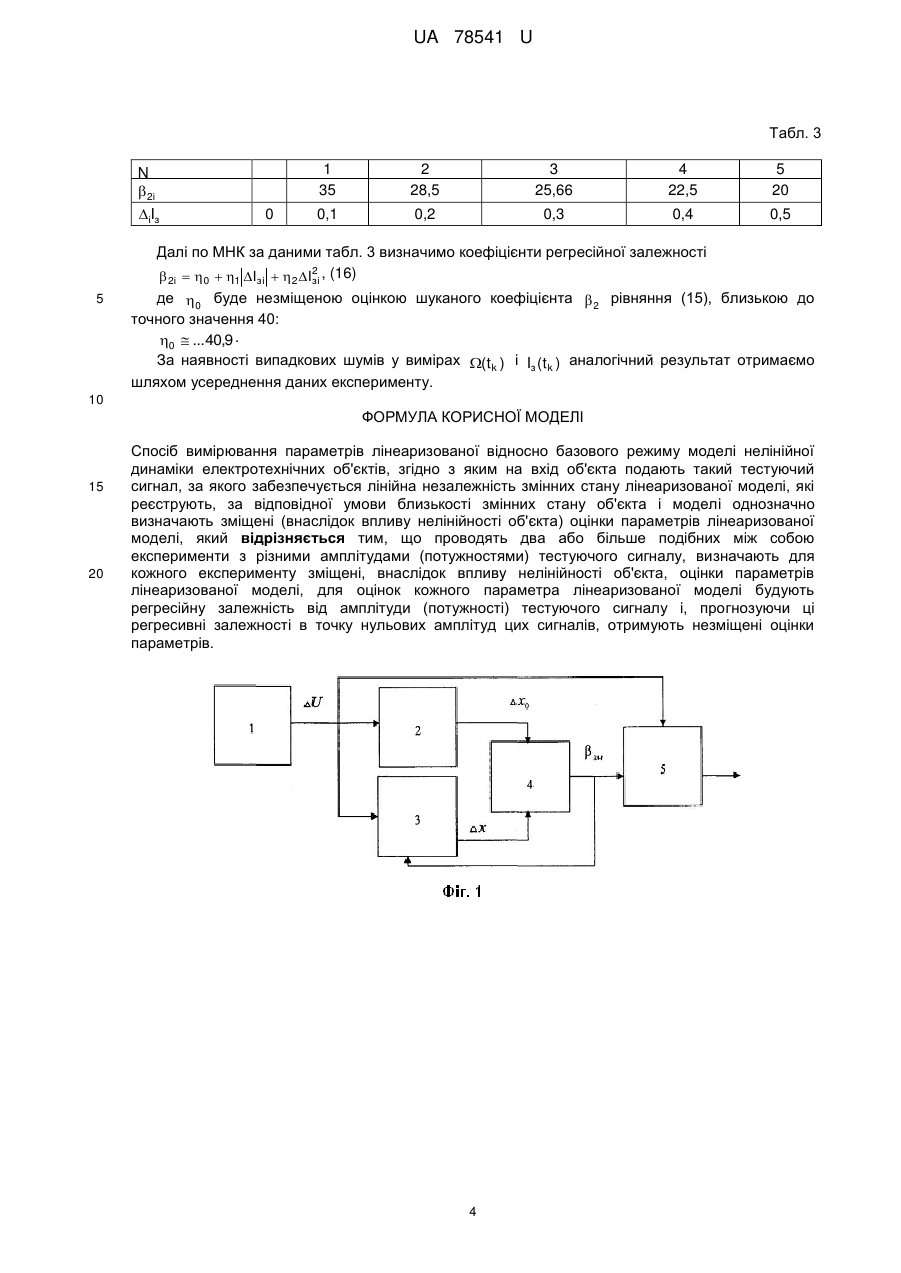
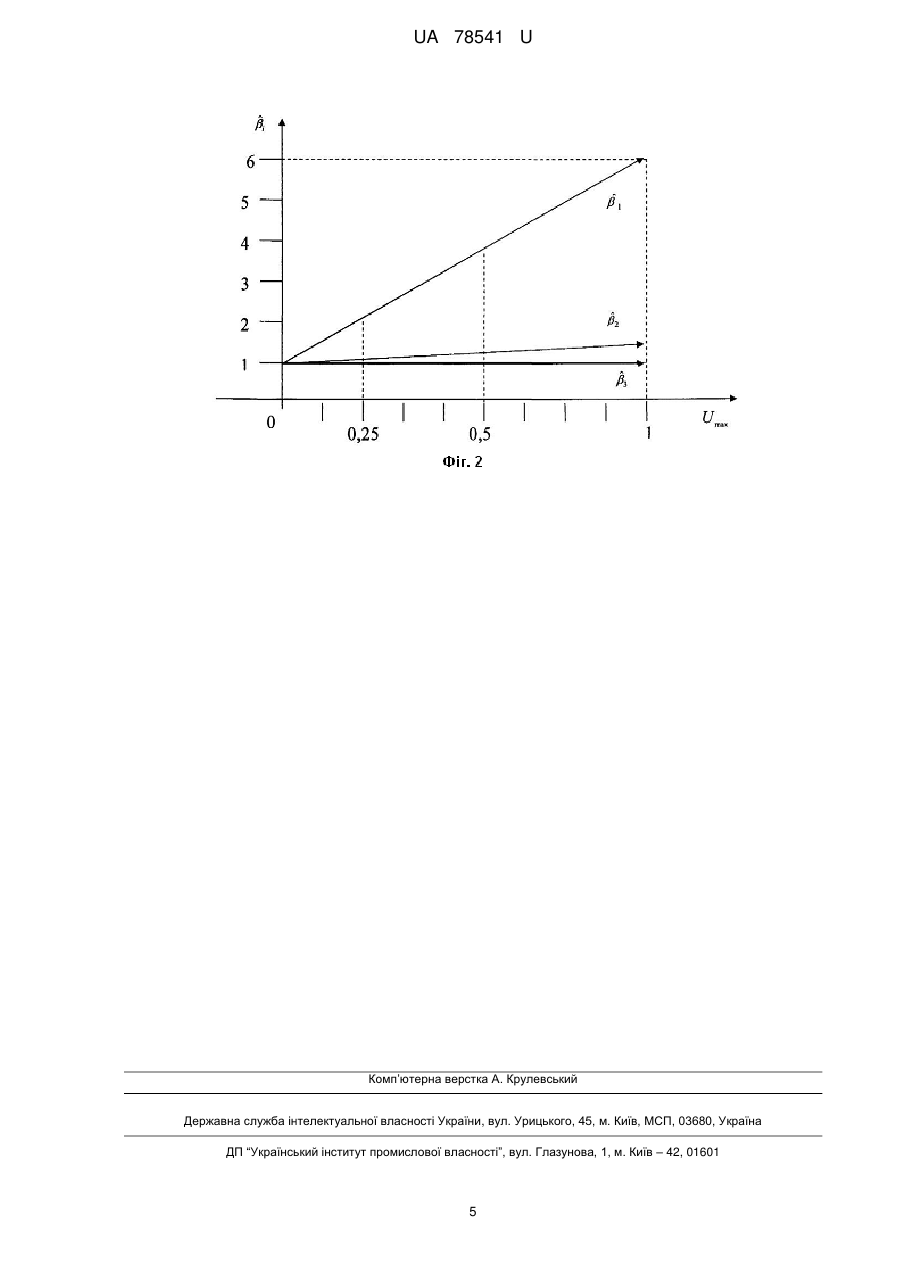
Реферат: Спосіб вимірювання параметрів лінеаризованої відносно базового режиму моделі нелінійної динаміки електротехнічних об'єктів включає подачу на вхід об'єкта такого тестуючого сигналу. Визначають зміщені оцінки параметрів лінеаризованої моделі. Проводять експерименти з різними амплітудами (потужностями) тестуючого сигналу. Визначають для кожного експерименту зміщені оцінки параметрів лінеаризованої моделі. Будують регресійні залежності від амплітуди (потужності) тестуючих сигналів для отримання незміщених оцінок параметрів. UA 78541 U (54) СПОСІБ ВИМІРЮВАННЯ ПАРАМЕТРІВ ЛІНЕАРИЗОВАНОЇ ВІДНОСНО БАЗОВОГО РЕЖИМУ МОДЕЛІ НЕЛІНІЙНОЇ ДИНАМІКИ ЕЛЕКТРОТЕХНІЧНИХ ОБ'ЄКТІВ UA 78541 U UA 78541 U 5 10 15 20 25 30 35 Корисна модель належить до електротехнічної галузі, а саме до натурних випробувань електротехнічних об'єктів (ЕТО) з метою визначення зручної для подальшої автоматизації лінійної моделі ЕТО в задачах автоматичної стабілізації бажаних режимів роботи ЕТО, в задачах діагностики стану ЕТО по параметрах лінеаризованої моделі, прогнозування якості і надійності функціонування ЕТО та інше (див. наприклад, Круг Г.К., Фатуев В.А. "Применение Dоптимальных планов для восстановления характеристик линейных объектов"// Труды МЭИ, вып. 116, 1972, С. 12-18.; Круг Г.К., Сосулин Ю.А., Фатуев В.А. "Планирование эксперимента в идентификации и электрополяции". М.: Наука, 1977, 150 с.). Найбільш близький до способу, що заявляється, є спосіб вимірювання параметрів лінеаризованої відносно базового режиму моделі нелінійної динаміки електротехнічного об'єкта, згідно з яким на вхід об'єкта подають тестуючий сигнал, за якого забезпечується лінійна незалежність змінних стану лінеаризованої моделі, які реєструють, за відповідної умови близькості змінних стану об'єкта і моделі однозначно визначають зміщені (внаслідок впливу нелінійності об'єкта) оцінки параметрів лінеаризованої моделі (Круг Г.К., Сосулин Ю.А., Фатуев В.А. Планирование эксперимента в идентификации и электрополяции. М.: Наука, 1977, 150 с.). В цьому способі, як і в багатьох інших, образно кажучи, параметри нелінійної моделі, як часткові похідні від вихідних змінних по вхідних, що являють собою тангенс кута нахилу дотичної до нелінійності в точці базового режиму, заміняються як би відношенням кінцевих приростів відповідних змінних, яке за великих приростів не відповідає шуканій похідній істинному параметру лінійної моделі. В основу корисної моделі поставлена задача визначення зручної автоматизації лінійної моделі, автоматичної стабілізації бажаних режимів роботи, діагностики стану ЕТО по параметрах лінеаризованої моделі, прогнозування якості і надійності функціонування ЕТО та інше, вирішується удосконаленням способу вимірювання параметрів лінеаризованої моделі нелінійної динаміки електротехнічних та інших об'єктів, в якому шляхом виконання додаткової операції прогнозування зміщених оцінок, отриманих для однотипних режимів різної амплітуди тестуючих сигналів і, відповідно до них різної амплітуди відхилень змінних стану від базового режиму об'єкта, в точку, яка відповідає нульовому відхиленню від базового режиму. Новим є те, що додаткові дії забезпечили можливість отримати незміщену оцінку параметрів моделі, лінеаризованої відносно базового режиму. Випадкову складову похибки, як і в існуючому методі, зменшують вибір спеціального тестуючого сигналу та збільшують вибірки даних. На фіг. 1 наведено структурну схему системи, яка ілюструє спосіб, що пропонується, де 1 - генератор тестуючих сигналів U різної амплітуди; 2 - нелінійний електротехнічний об'єкт, як відображення сигналів U в x 0 ; 3 - лінійна модель об'єкта, як відображення сигналів U в x ; 4 - блок формування і мінімізації функціонала нев'язки між виходами об'єкта x 0 і моделі ˆ x по вектору оцінок параметрів моделі; 5 - блок формування регресійної залежності зміщених оцінок вектора зм від норми U 40 45 50 тестового сигналу та розрахунку прогнозованого в точку U 0 незміщеного значення оцінки незм . Розглянемо реалізацію заявленого способу та його переваги на ряді прикладів. Приклад 1 Вихідний сигнал x 0 (t ) в об'єкті зв'язаний з трьома вхідними сигналами Ui квадратичною залежністю 2 2 x 0 ( t ) U1( t ) U2 ( t ) U3 ( t ) U1U2 ( t ) U1U3 ( t ) U1 ( t ) U2 ( t ) U3 ( t ) , (1) 2 де невідомі коефіцієнти при всіх змінних одиничні. Оцінюються коефіцієнти i ,i 12,3 , лінійної частини нелінійної моделі (1) по лінійній моделі , (2): x 0 (t ) 1U1 2 U2 3 U3 (t ) , (2) де (t ) - нев'язка лівої та правої частин; ліва частина x 0 (t ) задана згідно (1); час приймає N дискретних значень t (k 1)t , k 1,N ; N 100. Змінні U1(k ) , U2 (k ) експоненти, U3 (k ) - сходинка: 1 UA 78541 U (k 1) (k 1) ; ; (3) U1(k ) Umax 1 exp 0,2(N 1) U2 (k ) Umax 1 exp 0,1(N 1) U3 (k ) Umax 1(k ) , де Umax приймає три значення: 1;0,5; 0,25. Результати розрахунків оцінок i , по методу найменших квадратів (МНК) (для точних даних) 5 наведено на фіг. 2, які майже співпадають з результатами (для даних з 10 % білим шумом (k ) . ˆ В обох випадках регресійні залежності від U , отримані по МНК, дають значення i i max близьке до точного значення i 1 . Розрахунок по МНК повної моделі (1) для даних з 10 % ˆ шумами приводить до розкиду оцінок на порядок більший, ніж їх значення 1 . i 10 i Приклад 2 Задача стабілізації швидкості ДПС з незалежним збудженням. З теорії електричних машин відома залежність швидкості (рад/с) ДПС від керуючого ( Iз струм збудження магнітного потоку Ф ) і збурюючого сигналу (момент навантаження або пропорційний до нього струм Iя якоря): Uя Iя R я , (4) СмФ(Iз ) де См - конструктивна стала ДПС, Uя - напруга R я - електричний опір якірного кола. Нехай залежність СмФ(Iз ) має наступний вигляд (Iз ,Iя ) 15 20 СмФ(Iз ) 2Iз 0,2I3 , (5) з Uя 220В В, R я 0,5 Ом ; номінальний режим має Iз0 0,5 А , Iя0 0,5 А . В обмеженій області номінального режиму залежність (13) у відхиленнях , Iз , Iя від номінальних значень 0 , Iз0 , Iя 0 , набуває вигляду: ,( Iз , Iя ) Iз Iз 0,Iя0 Iз Iя I Iя (6) з 0,Iя 0 або, з урахуванням (13), (14) та відповідних числових значень параметрів, Iя 412,7 Iз 0,5128 Iя . (7) (2Iзо 0,2I3 )2 зо Швидкість буде стабільною, якщо 412,7 Iз 0,5128 Iя 0 . (8) Звідси розімкнене керування по збуренню набуває вигляду Iз 0,00124 Iя , (9) 25 30 (Uяо Iяо R яо ) (I3 0,6I2 ) R я (2Iзо 0,2I3 )2 зо зо яке забезпечує стабільність номінальної швидкості 0 ДПС в межах Iз , Iя , де лінійне рівняння (8) справедливе з точністю до малих другого порядку. Згідно до запропонованого способу, з експерименту на ДПС визначимо залежність (Iз ) за незмінного Iя0 : Табл. 1 Iз 0,2 0,3 0,35 0,4 0,45 0,5 0,55 0,6 545,93 363,85 314,57 274,06 246,66 248,57 203,9 188,01 За даними табл. 1 обчислимо залежність від Iз Iз 35 2 0,65 0,7 0,8 174,69 163,36 145,23 UA 78541 U Табл. 2 Iз 0 0,2 0,3 - Iз 0,1 -427,66 -430,25 -466 Тепер по МНК апроксимуємо дані табл. 2 квадратичною параболою: і 0 1 Iзі 2 I2 , (10) зі Iзі іIз 5 10 де 0 - шукане значення Iз0, Iя0 , яке для (Iз 0) дорівнює точному значенню - 412,7I з рівняння (7). За наявності випадкових шумів аналогічний результат, близький до точного, отримаємо шляхом усереднення даних декількох незалежних експериментів. Приклад 3 Нелінійне диференційне рівняння модель Гамерштейна описує динаміку ДПС: d M (Iз ) (t ) f (Iз (t )) , (11) dt де M (Iз ) - електромеханічна стала ДПС: f (Iз ) гіпербола: 0 . (12) Iз Користуючись запропонованим способом, слід визначити коефіцієнти лінеаризованої відносно базового режиму (0 ,Iз0, d ) моделі ДПС: dt f (Iз ) 15 df (I3 ) d ( t ) I30 I3 ( t ) , (13) dt dI3 де враховуючи залежність (12), 0 20 25 df (IЗ ) 10 Iз0 2 і 2 40 (14) dIЗ 0,25 Iз0 тобто рівняння (23) набуває вигляду: d 0 (t ) 2 Iз (t ) . (15) dt Коефіцієнти 0 і 2 підлягають визначенню. Виміри у реальній ситуації зашумлені. Тому для досить малих відхилень і Iз від базового режиму співвідношення "шум-сигнал" буде занадто великим. Тому, згідно до даного ˆ ˆ способу, визначимо по МНК зміщені оцінки 0 і 2 для декількох однотипних відхилень різної, але суттєвої, відносно рівня шумів, амплітуди. Незміщену оцінку 0 і 2 отримаємо шляхом апроксимації по МНК регресійних залежностей ˆ ˆ зміщених оцінок , від норми (I ) відхилень I : 0і Нехай Iзо 0,5 А ; 30 2і зі іIз зі сходинки, що приймають значення 0,2А; 0,3А; 0,4А; 0 1 ; d(t k ) , Iз0 іIз (t k ) , k 0,1 N 100 , і по 1 1; 0 10 . Зафіксуємо у часі t k виміри (t k ) , ,... dt МНК для кожного і-го відхилення знайдемо для рівняння (15) коефіцієнти 2і (табл. 3). 3 UA 78541 U Табл. 3 N 2і іIз 1 35 0 2 28,5 3 25,66 4 22,5 5 20 0,1 0,2 0,3 0,4 0,5 Далі по МНК за даними табл. 3 визначимо коефіцієнти регресійної залежності 2і 0 1 Iзі 2 I2 , (16) зі 5 де 0 буде незміщеною оцінкою шуканого коефіцієнта 2 рівняння (15), близькою до точного значення 40: 0 ...40,9 . За наявності випадкових шумів у вимірах (t k ) і Iз (t k ) аналогічний результат отримаємо шляхом усереднення даних експерименту. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Спосіб вимірювання параметрів лінеаризованої відносно базового режиму моделі нелінійної динаміки електротехнічних об'єктів, згідно зяким на вхід об'єкта подають такий тестуючий сигнал, за якого забезпечується лінійна незалежність змінних стану лінеаризованої моделі, які реєструють, за відповідної умови близькості змінних стану об'єкта і моделі однозначно визначають зміщені (внаслідок впливу нелінійності об'єкта) оцінки параметрів лінеаризованої моделі, який відрізняється тим, що проводять два або більше подібних між собою експерименти з різними амплітудами (потужностями) тестуючого сигналу, визначають для кожного експерименту зміщені, внаслідок впливу нелінійності об'єкта, оцінки параметрів лінеаризованої моделі, для оцінок кожного параметра лінеаризованої моделі будують регресійну залежність від амплітуди (потужності) тестуючого сигналу і, прогнозуючи ці регресивні залежності в точку нульових амплітуд цих сигналів, отримують незміщені оцінки параметрів. 4 UA 78541 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of parameters of linearized with respect to basic mode model of non-linear dynamics of electro-technical objects
Автори англійськоюSilvestrov Anton Mykolaiovych, Skrynnyk Oleksii Mykolaiovych, Umanska Kateryna Viktorivna, Hontar Maksym Mykolaiovych
Назва патенту російськоюСпособ измерения параметров линеаризованной относительно базового режима модели нелинейной динамики электротехнических объектов
Автори російськоюСильвестров Антон Николаевич, Скринник Алексей Николаевич, Уманская Екатерина Викторовна, Гонтар Максим Николаевич
МПК / Мітки
МПК: G01R 31/02
Мітки: електротехнічних, базового, об'єктів, параметрів, нелінійної, вимірювання, лінеаризованої, моделі, спосіб, динаміки, відносної, режиму
Код посилання
<a href="https://ua.patents.su/7-78541-sposib-vimiryuvannya-parametriv-linearizovano-vidnosno-bazovogo-rezhimu-modeli-nelinijjno-dinamiki-elektrotekhnichnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання параметрів лінеаризованої відносно базового режиму моделі нелінійної динаміки електротехнічних об’єктів</a>
Спосіб вимірювання кутів повороту контрольованого об’єкта відносно базового напрямку і оптико-електронний пристрій для його реалізації
Номер патенту: 79154
Опубліковано: 25.05.2007
Автори: Голік Марат Миколайович, Пасько Ігор Матвійович, Титаренко Іван Титович, Брух Георгій Андрійович, Гринюк Ігор Євгенович
МПК: G01B 11/26, G01B 21/22
Мітки: пристрій, реалізації, кутів, об'єкта, оптико-електронний, відносної, базового, повороту, вимірювання, спосіб, напрямку, контрольованого
Формула / Реферат:
1. Спосіб вимірювання кутів повороту контрольованого об'єкта відносно базового напрямку, в якому розміщують на контрольованому об'єкті один з відбивачів світла, формують по черзі за допомогою принаймні двох джерел світла в площині, паралельній площині вимірювання, принаймні два світлових пучки, направляють пучки світла на відбивачі світла, освітлюють пучками світла різні ділянки одного об’єктива вимірювального приладу, формують по черзі...
Спосіб контролю нелінійної статичної і лінійної динамічної складових моделі гамерштейна об’єкта керування
Номер патенту: 34904
Опубліковано: 26.08.2008
Автор: Галай Василь Миколайович
МПК: G05B 13/00
Мітки: об'єкта, спосіб, контролю, складових, нелінійної, керування, статичної, лінійної, моделі, динамічної, гамерштейна
Формула / Реферат:
Спосіб контролю нелінійної статичної і лінійної динамічної складових моделі Гамерштейна об'єкта керування, згідно з яким на вхід контрольованого об'єкта подають часову послідовність тестуючих впливів різної амплітуди, реєструють вихідну реакцію об'єкта на ці впливи і, за умови близькості цієї реакції до реакції моделі Гамерштейна, визначають її параметри, який відрізняється тим, що нелінійну модель заміняють лінійною, для кожної з ділянок...
Спосіб побудови моделі нелінійної динамічної системи
Номер патенту: 41143
Опубліковано: 15.08.2001
Автори: Горєлов Олександр Сергійович, Нащанський Олександр Анатолійович, Гуртов Олександр Олександрович, Зубко Олег Олександрович, Зєліков Всеволод Ілліч, Серков Олександр Анатолійович
МПК: G05B 23/02
Мітки: побудови, нелінійної, моделі, динамічної, спосіб, системі
Формула / Реферат:
Спосіб побудови моделі нелінійної динамічної системи, що включає до свого складу подачу тестуючих імпульсів, визначення реакції на тестуючий імпульс, який відрізняється тим, що додаткове тестування відбувається пакетом імпульсів, кількість яких у пакеті та часова відстань між ними змінюєтся під час тестування.
Спосіб визначення параметрів нелінійної дисипативної коливальної системи
Номер патенту: 46868
Опубліковано: 11.01.2010
Автор: Пузько Ігор Данилович
МПК: G01H 11/00
Мітки: параметрів, спосіб, нелінійної, дисипативної, визначення, коливальної, системі
Формула / Реферат:
Спосіб визначення параметрів нелінійної дисипативної коливальної системи, за яким формують два режими вимушених коливань нелінійної коливальної системи, в першому режимі частоту сигнала вимушеної дії змінюють із постійною швидкістю , в другому режимі - із постійною швидкістю , в обох режимах початкові...
Спосіб визначення параметрів нелінійної механічної коливальної системи

Номер патенту: 49838
Опубліковано: 11.05.2010
Автор: Пузько Ігор Данилович
МПК: G01M 7/00
Мітки: системі, коливальної, параметрів, визначення, механічної, нелінійної, спосіб
Формула / Реферат:
Спосіб визначення параметрів нелінійної механічної коливальної системи, за яким збуджують вільні коливання досліджуваної коливальної системи, фіксують і запам'ятовують часові моменти і , і
Попередній патент: Мішалка
Наступний патент: Спосіб підвищення сталості тонколистових конструкцій створенням металургійних ребер жорсткості
Випадковий патент: Електрофільтр