Спосіб контролю нелінійної статичної і лінійної динамічної складових моделі гамерштейна об’єкта керування
Формула / Реферат
Спосіб контролю нелінійної статичної і лінійної динамічної складових моделі Гамерштейна об'єкта керування, згідно з яким на вхід контрольованого об'єкта подають часову послідовність тестуючих впливів різної амплітуди, реєструють вихідну реакцію об'єкта на ці впливи і, за умови близькості цієї реакції до реакції моделі Гамерштейна, визначають її параметри, який відрізняється тим, що нелінійну модель заміняють лінійною, для кожної з ділянок тестуючого впливу відповідної амплітуди визначають параметри лінійної моделі, які апроксимують регресійною залежністю амплітуди тестуючого впливу, і за шукане значення параметрів лінійної динамічної складової моделі приймають ті, що відповідають нульовій амплітуді тестуючого впливу; скориставшись уже відомою динамічною складовою, знаходять невимірювану змінну нелінійної статичної складової моделі і вже за відомим співвідношенням "вхід-вихід" нелінійної складової отримують її непараметричне чи (шляхом апроксимації) параметричне представлення.
Текст
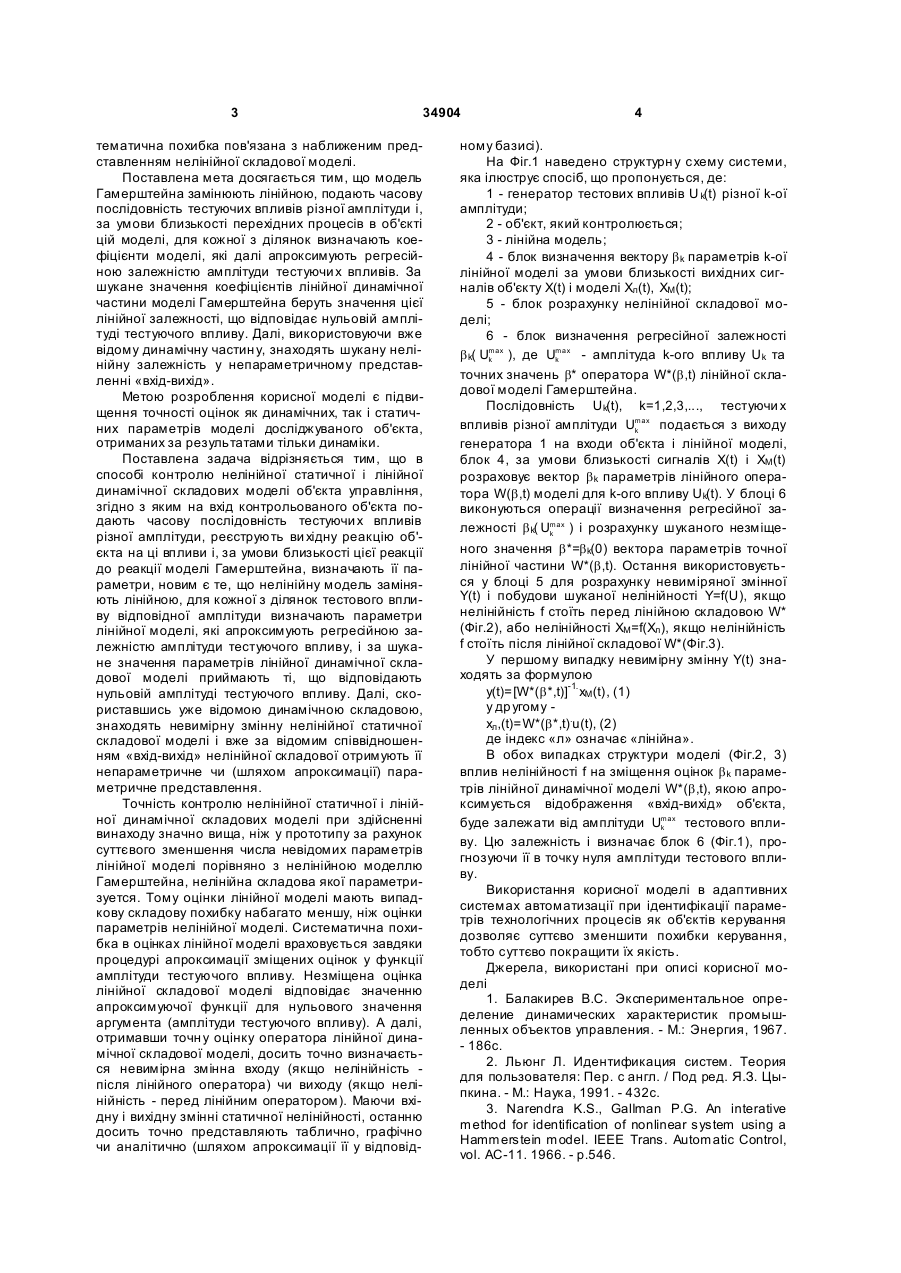
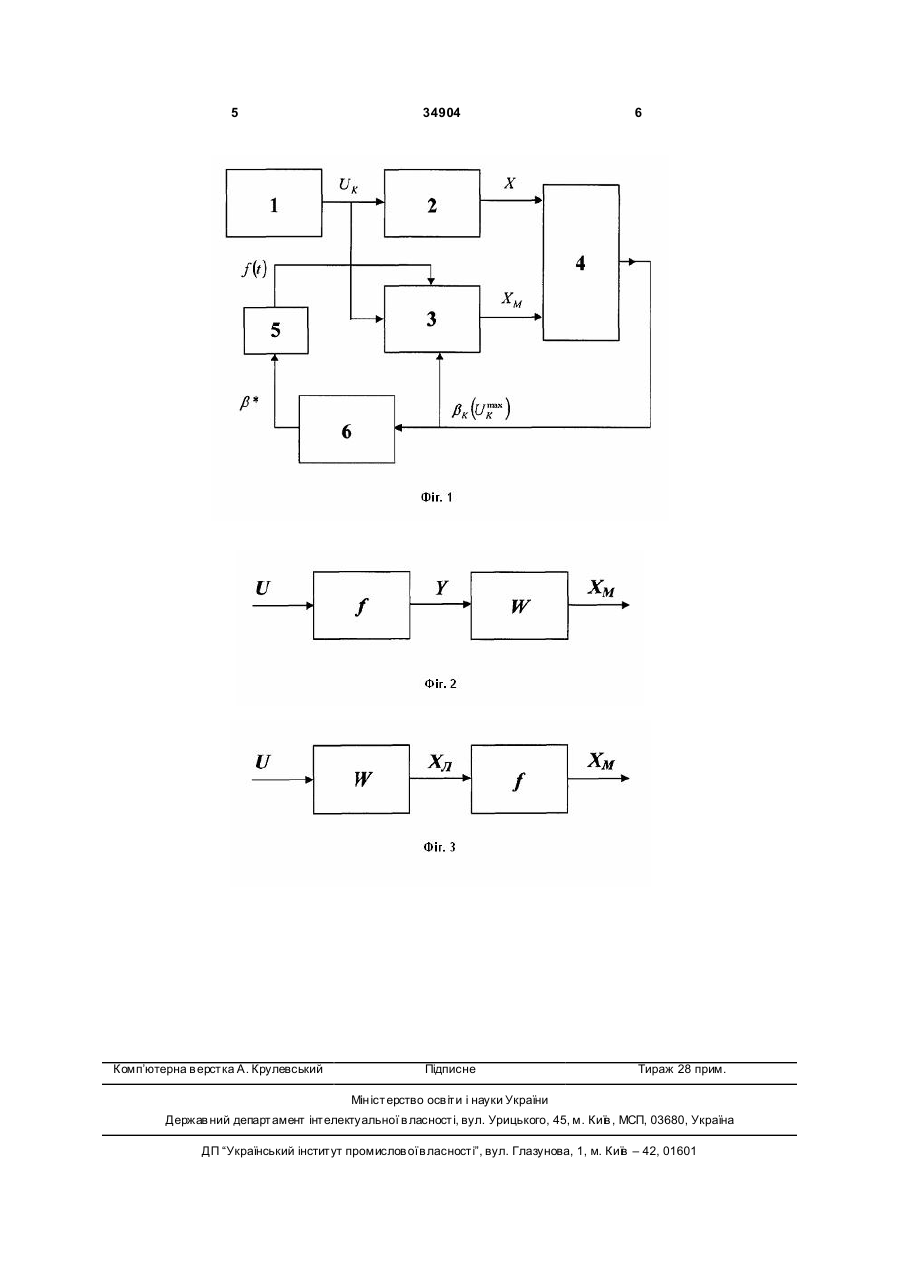
Спосіб контролю нелінійної статичної і лінійної динамічної складових моделі Гамерштейна об'єкта керування, згідно з яким на вхід контрольованого об'єкта подають часову послідовність тестуючих впливів різної амплітуди, реєструють вихідну реакцію об'єкта на ці впливи і, за умови близькості цієї реакції до реакції моделі Гамерштейна, визнача 3 34904 тематична похибка пов'язана з наближеним представленням нелінійної складової моделі. Поставлена мета досягається тим, що модель Гамерштейна замінюють лінійною, подають часову послідовність тестуючих впливів різної амплітуди і, за умови близькості перехідних процесів в об'єкті цій моделі, для кожної з ділянок визначають коефіцієнти моделі, які далі апроксимують регресійною залежністю амплітуди тестуючи х впливів. За шукане значення коефіцієнтів лінійної динамічної частини моделі Гамерштейна беруть значення цієї лінійної залежності, що відповідає нульовій амплітуді тестуючого впливу. Далі, використовуючи вже відому динамічну частин у, знаходять шукану нелінійну залежність у непараметричному представленні «вхід-вихід». Метою розроблення корисної моделі є підвищення точності оцінок як динамічних, так і статичних параметрів моделі досліджуваного об'єкта, отриманих за результатами тільки динаміки. Поставлена задача відрізняється тим, що в способі контролю нелінійної статичної і лінійної динамічної складових моделі об'єкта управління, згідно з яким на вхід контрольованого об'єкта подають часову послідовність тестуючи х впливів різної амплітуди, реєструють ви хідну реакцію об'єкта на ці впливи і, за умови близькості цієї реакції до реакції моделі Гамерштейна, визначають її параметри, новим є те, що нелінійну модель заміняють лінійною, для кожної з ділянок тестового впливу відповідної амплітуди визначають параметри лінійної моделі, які апроксимують регресійною залежністю амплітуди тестуючого впливу, і за шукане значення параметрів лінійної динамічної складової моделі приймають ті, що відповідають нульовій амплітуді тестуючого впливу. Далі, скориставшись уже відомою динамічною складовою, знаходять невимірну змінну нелінійної статичної складової моделі і вже за відомим співвідношенням «вхід-вихід» нелінійної складової отримують її непараметричне чи (шляхом апроксимації) параметричне представлення. Точність контролю нелінійної статичної і лінійної динамічної складових моделі при здійсненні винаходу значно вища, ніж у прототипу за рахунок суттєвого зменшення числа невідомих параметрів лінійної моделі порівняно з нелінійною моделлю Гамерштейна, нелінійна складова якої параметризуется. Тому оцінки лінійної моделі мають випадкову складову похибку набагато меншу, ніж оцінки параметрів нелінійної моделі. Систематична похибка в оцінках лінійної моделі враховується завдяки процедурі апроксимації зміщених оцінок у функції амплітуди тестуючого впливу. Незміщена оцінка лінійної складової моделі відповідає значенню апроксимуючої функції для нульового значення аргумента (амплітуди тестуючого впливу). А далі, отримавши точн у оцінку оператора лінійної динамічної складової моделі, досить точно визначається невимірна змінна входу (якщо нелінійність після лінійного оператора) чи виходу (якщо нелінійність - перед лінійним оператором). Маючи вхідну і вихідну змінні статичної нелінійності, останню досить точно представляють таблично, графічно чи аналітично (шляхом апроксимації її у відповід 4 ному базисі). На Фіг.1 наведено структурн у схему системи, яка ілюструє спосіб, що пропонується, де: 1 - генератор тестових впливів U k(t) різної k-ої амплітуди; 2 - об'єкт, який контролюється; 3 - лінійна модель; 4 - блок визначення вектору b k параметрів k-ої лінійної моделі за умови близькості вихідних сигналів об'єкту X(t) і моделі Xл(t), ХМ(t); 5 - блок розрахунку нелінійної складової моделі; 6 - блок визначення регресійної залежності b k( Umax ), де Umax - амплітуда k-ого впливу Uk та k k точних значень b* оператора W*(b,t) лінійної складової моделі Гамерштейна. Послідовність Uk(t), k=1,2,3,..., тестуючи х впливів різної амплітуди Umax подається з виходу k генератора 1 на входи об'єкта і лінійної моделі, блок 4, за умови близькості сигналів X(t) і XM(t) розраховує вектор b k параметрів лінійного оператора W(b,t) моделі для k-ого впливу Uk(t). У блоці 6 виконуються операції визначення регресійної залежності b k( Umax ) i розрахунку шуканого незміщеk ного значення b*=b k(0) вектора параметрів точної лінійної частини W*(b,t). Остання використовується у блоці 5 для розрахунку невиміряної змінної Y(t) і побудови шуканої нелінійності Y=f(U), якщо нелінійність f стоїть перед лінійною складовою W* (Фіг.2), або нелінійності ХM=f(Хл), якщо нелінійність f стоїть після лінійної складової W*(Фіг.3). У першому випадку невимірну змінну Y(t) знаходять за формулою y(t)=[W*(b*,t)]-1. xM(t), (1) у др угому xл,(t)=W*(b*,t).u(t), (2) де індекс «л» означає «лінійна». В обох випадках структури моделі (Фіг.2, 3) вплив нелінійності f на зміщення оцінок b k параметрів лінійної динамічної моделі W*(b,t), якою апроксимується відображення «вхід-вихід» об'єкта, буде залежати від амплітуди Umax тестового вплиk ву. Цю залежність і визначає блок 6 (Фіг.1), прогнозуючи її в точку нуля амплітуди тестового впливу. Використання корисної моделі в адаптивних системах автоматизації при ідентифікації параметрів технологічних процесів як об'єктів керування дозволяє суттєво зменшити похибки керування, тобто суттєво покращити їх якість. Джерела, використані при описі корисної моделі 1. Балакирев B.C. Экспериментальное определение динамических характеристик промышленных объектов управления. - М.: Энергия, 1967. - 186с. 2. Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ. / Под ред. Я.З. Цыпкина. - М.: Наука, 1991. - 432с. 3. Narendra K.S., Gallman P.G. An interative method for identification of nonlinear system using a Hammerstein model. IEEE Trans. Automatic Control, vol. AC-11. 1966. - p.546. 5 Комп’ютерна в ерстка А. Крулевський 34904 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of non-linear static and linear dynamical components of gamershtain model of control object
Автори англійськоюHalai Vasyl Mykolaiovych
Назва патенту російськоюСпособ контроля нелинейной статической и линейной динамической составляющих модели гамерштейна и объекта управления
Автори російськоюГалай Василий Николаевич
МПК / Мітки
МПК: G05B 13/00
Мітки: складових, контролю, нелінійної, гамерштейна, об'єкта, статичної, спосіб, моделі, лінійної, керування, динамічної
Код посилання
<a href="https://ua.patents.su/3-34904-sposib-kontrolyu-nelinijjno-statichno-i-linijjno-dinamichno-skladovikh-modeli-gamershtejjna-obehkta-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю нелінійної статичної і лінійної динамічної складових моделі гамерштейна об’єкта керування</a>
Спосіб побудови моделі нелінійної динамічної системи
Номер патенту: 41143
Опубліковано: 15.08.2001
Автори: Гуртов Олександр Олександрович, Нащанський Олександр Анатолійович, Серков Олександр Анатолійович, Зєліков Всеволод Ілліч, Зубко Олег Олександрович, Горєлов Олександр Сергійович
МПК: G05B 23/02
Мітки: динамічної, моделі, нелінійної, системі, спосіб, побудови
Формула / Реферат:
Спосіб побудови моделі нелінійної динамічної системи, що включає до свого складу подачу тестуючих імпульсів, визначення реакції на тестуючий імпульс, який відрізняється тим, що додаткове тестування відбувається пакетом імпульсів, кількість яких у пакеті та часова відстань між ними змінюєтся під час тестування.
Спосіб визначення гладкої статичної нелінійності з динаміки об`єкта контролю
Номер патенту: 30530
Опубліковано: 25.02.2008
Автори: Сільвестров Антон Миколайович, Галай Петро Миколайович, Лисиця Павло Михайлович
МПК: G05B 13/00
Мітки: динаміки, спосіб, контролю, нелінійності, об'єкта, визначення, гладкої, статичної
Формула / Реферат:
Спосіб визначення гладкої статичної нелінійності з динаміки об'єкта контролю, згідно з яким на вхід об'єкта, що контролюється, подають тестуючий вплив і реєструють вихідну змінну об'єкта, який відрізняється тим, що вихідну змінну об'єкта пропускають через компенсатор динаміки об'єкта, де структуру і параметри компенсатора визначають за умови заданого рівня гладкості залежності "вхід - скомпенсований вихід" об'єкта.
Спосіб прогнозуючого керування випрямлячем, навантаженого на двигун, по моделі об’єкту
Номер патенту: 28769
Опубліковано: 25.12.2007
Автори: Бахнов Леонід Євгенійович, Кіяшко Борис Олександрович, Сунанто ..., Тимченко Микола Олександрович, Іванов Олександр Євгенійович, Сокол Євгеній Іванович, Домнін Ігор Феліксович
МПК: H02M 7/155, G05B 13/04, H02P 7/06
Мітки: спосіб, випрямлячем, моделі, об'єкту, навантаженого, керування, двигун, прогнозуючого
Формула / Реферат:
1. Спосіб прогнозуючого керування випрямлячем, навантаженого на двигун, по моделі об'єкта, який полягає у тому, що задають струм навантаження, вимірюють фактичний струм навантаження, вимірюють проти ЕРС навантаження та визначають момент подачі чергових імпульсів керування на тиристори на кожному інтервалі дискретності, який відрізняється тим, що момент подачі імпульсів керування визначається шляхом циклічного розрахунку функціонала на кожному...
Спосіб зміни динамічної провідності напівпроводникового матеріалу
Номер патенту: 23308
Опубліковано: 31.08.1998
Автори: Стахіра Павло Йосипович, Стахіра Роман Йосипович, Павлишин Олег Володимирович, Готра Зенон Юрійович
МПК: H01L 31/08
Мітки: динамічної, спосіб, матеріалу, провідності, напівпроводникового, зміни
Формула / Реферат:
Спосіб зміни динамічної провідності напівпровідникового матеріалу, згідно з яким до напівпровідникового елементу прикладають постійну електричну напругу, здійснюють періодичний тепловий нагрів та фіксують амплітуду, частоту та фазу вихідного сигналу, який відрізняється тим, що після фіксації амплітуди, частоти та фази вихідного сигналу, продовжуючи періодичний тепловий нагрів, діють модульованим оптичним випромінюванням з області спектра...
Спосіб динамічної протифазової стабілізації коливань токарного верстата при точінні
Номер патенту: 34564
Опубліковано: 11.08.2008
Автори: Румбешта Валентин Олександрович, Гнатейко Нонна Валентинівна
МПК: F16F 15/00
Мітки: динамічної, коливань, стабілізації, протифазової, токарного, точінні, спосіб, верстата
Формула / Реферат:
Спосіб динамічної протифазової стабілізації коливань токарного верстата при точінні, що включає вимірювання параметрів цих коливань, який відрізняється тим, що із параметрів, отриманих при вимірюванні, виділяють першу гармоніку коливань верстата, проводять її аналіз і за допомогою пошукової зміни в швидкості різання, в залежності від значення амплітуди першої гармоніки, змінюють динамічний коливальний режим процесу різання шляхом зміщення...
Попередній патент: Пристрій для ущільнення стінових блоків із бетонних сумішей
Наступний патент: Спосіб улаштування армованої буронабивної палі
Випадковий патент: Термоелектричний сплав