Аеродинамічні ваги
Номер патенту: 83141
Опубліковано: 10.06.2008
Автори: Гордін Олександр Григорович, Кулік Анатолій Степанович

Формула / Реферат
1. Аеродинамічні ваги, які містять корпус, пристрої, що підтримують модель, яка досліджується і розміщується в потоці повітря або газу, плаваючу раму, яка використовується для закріплення підтримуючих пристроїв і моделі та для сприйняття сил та моментів, прикладених до моделі, силові вимірювальні елементи, механізм для зміни кутів орієнтації моделі відносно потоку повітря, які відрізняються тим, що плаваюча рама виконана у вигляді тримірної жорсткої тонкострижньової конструкції, яка не спотворює характер потоку повітря або газу і несе закріплену усередині неї за допомогою механізму для зміни кутів орієнтації і підтримуючих пристроїв модель, яка досліджується, а силові вимірювальні елементи виконані у вигляді струнних пружних розтяжок, які з'єднують плаваючу раму з корпусом.
2. Аеродинамічні ваги за п. 1, які відрізняються тим, що плаваюча рама з моделлю, яка досліджується, підвішена в корпусі аеродинамічної труби за допомогою восьми ідентичних груп струнних пружних розтяжок, кожна з яких одним своїм кінцем закріплена на вершині плаваючої рами, а другим - на корпусі аеродинамічної труби, та розміщена паралельно одній з осей ортогональної системи координат, жорстко зв'язаної з плаваючою рамою, причому кожна група вміщує три струнних пружних розтяжки, а кожна струнна пружна розтяжка розташована в полі постійного магніту і є елементом автогенератора електричних коливань.
3. Аеродинамічні ваги за будь-яким із пп. 1 і 2, які відрізняються тим, що в їх схему введена система обробки інформації, яка включає двадцять чотири ідентичних канали, кожний з яких складається з автогенератора, блока узгодження, пристрою керування перетворювачем, перетворювача кількості імпульсів в код, генератора заповнюючих імпульсів та вихідного буферного регістра, причому вихід автогенератора, який включає до свого складу струнну пружну розтяжку як чутливий елемент, з'єднаний зі входом блока узгодження, послідовно зв'язаного з пристроєм керування, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код, а другий вихід - до першого керуючого входу вихідного буферного регістра, з інформаційним входом якого з'єднаний вихід перетворювача кількості імпульсів в код, а другий керуючий вхід вихідного буферного регістра з'єднаний з вихідним портом обчислювального пристрою, причому другий вхід перетворювача кількості імпульсів в код зв'язаний з виходом генератора заповнюючих імпульсів, а вихід вихідного буферного регістра з'єднаний з відповідним портом обчислювального пристрою.
Текст
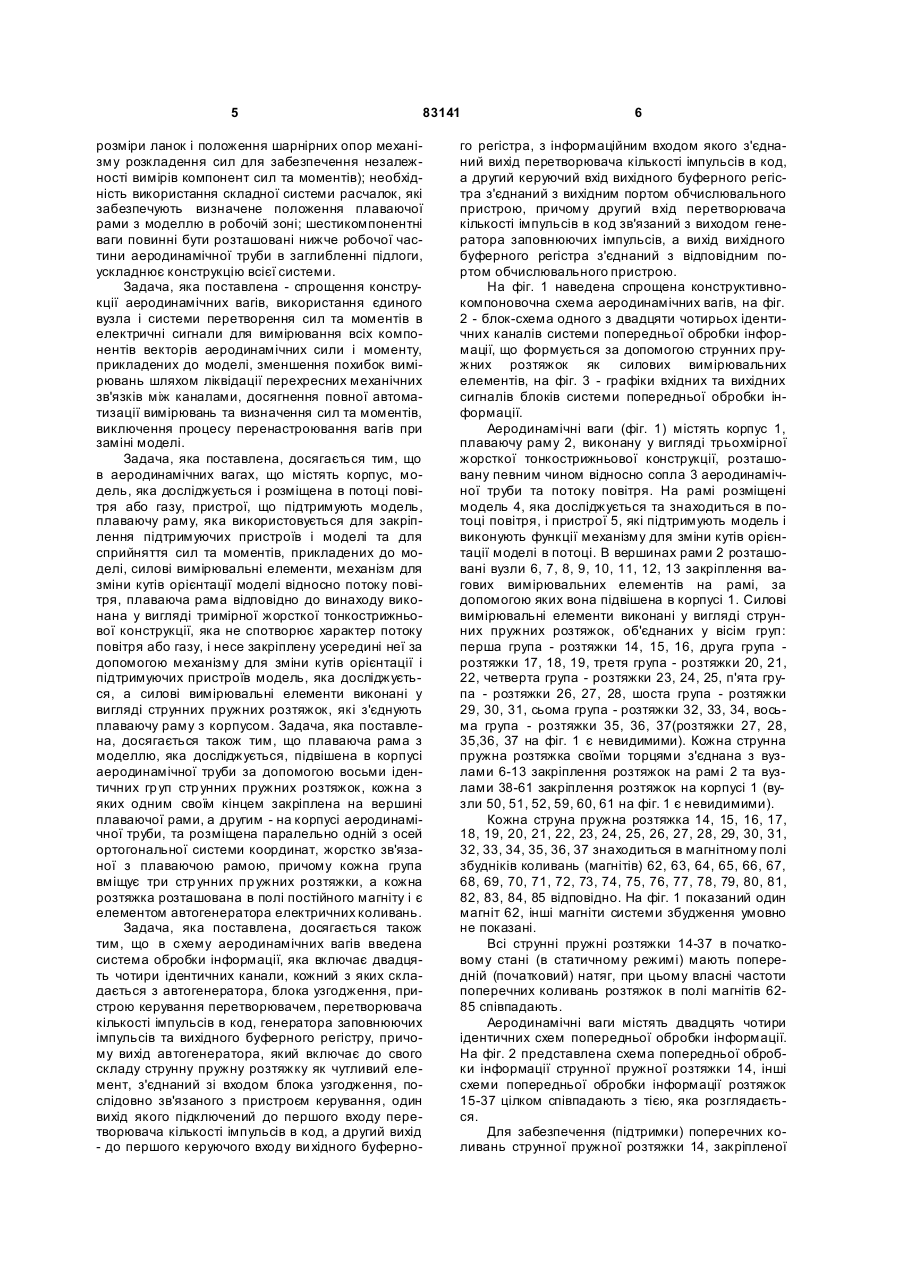
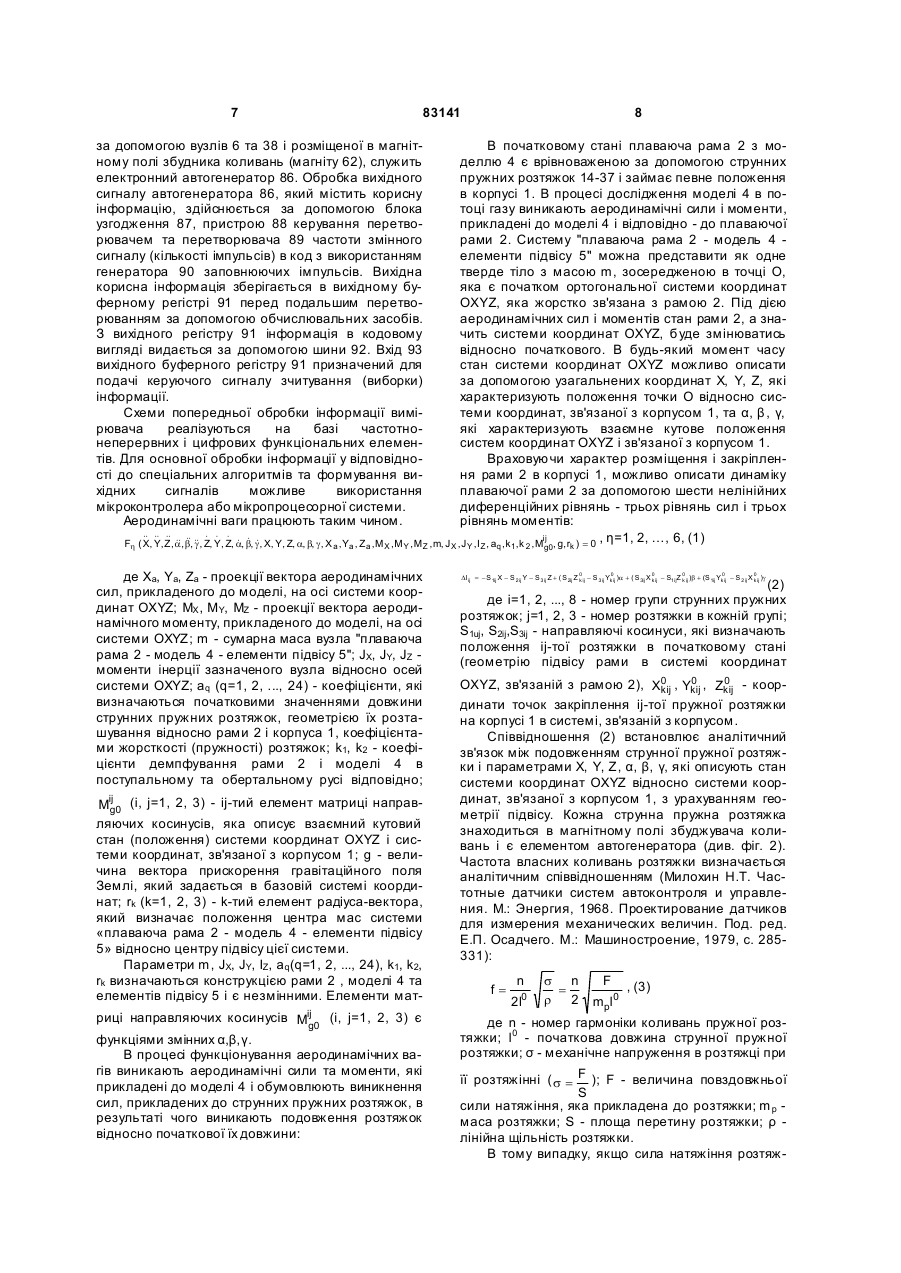
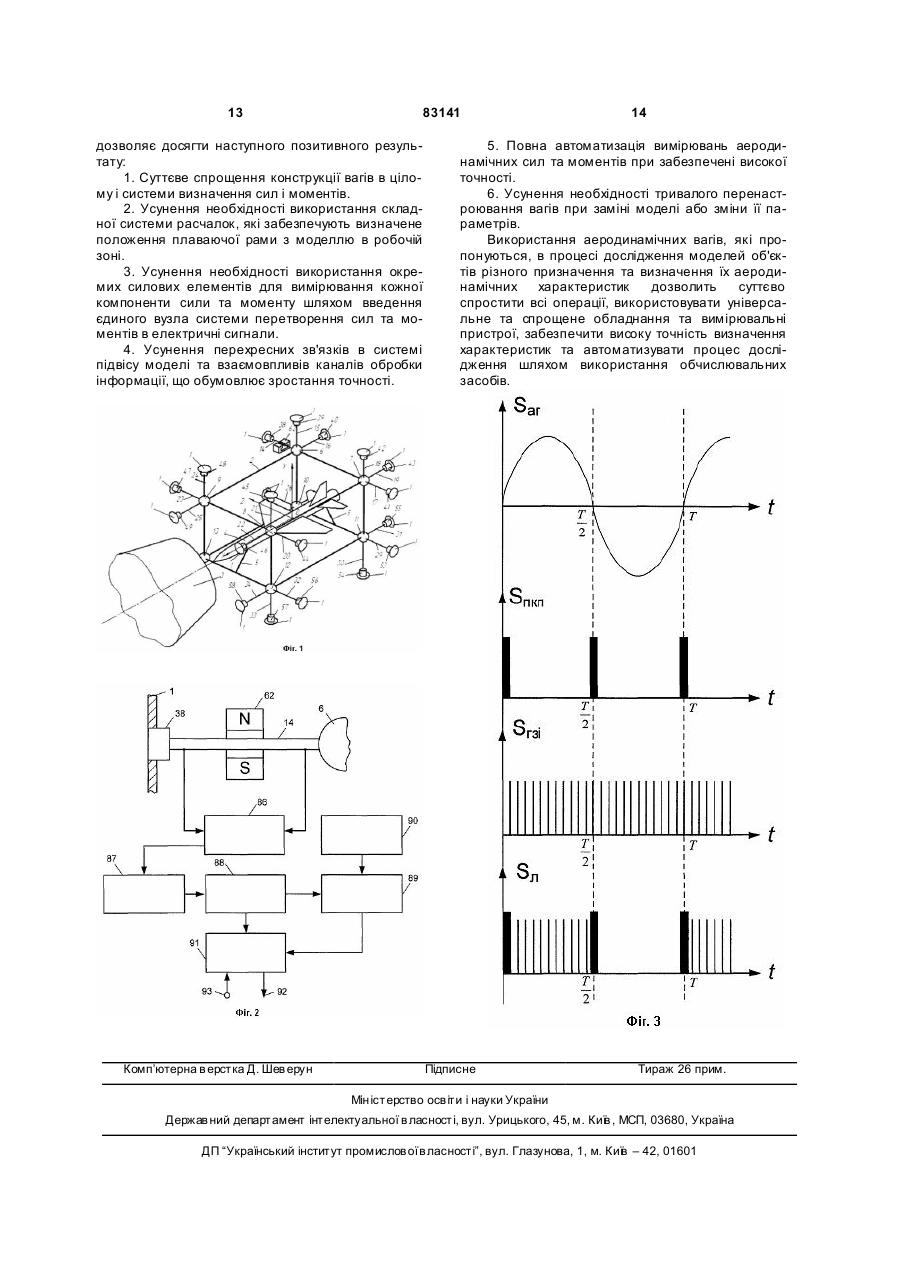
1. Аеродинамічні ваги, які містять корпус, пристрої, що підтримують модель, яка досліджується і розміщується в потоці повітря або газу, плаваючу раму, яка використовується для закріплення підтримуючих пристроїв і моделі та для сприйняття сил та моментів, прикладених до моделі, силові вимірювальні елементи, механізм для зміни кутів орієнтації моделі відносно потоку повітря, які відрізняються тим, що плаваюча рама виконана у вигляді тримірної жорсткої тонкострижньової конструкції, яка не спотворює характер потоку повітря або газу і несе закріплену усередині неї за допомогою механізму для зміни кутів орієнтації і підтримуючих пристроїв модель, яка досліджується, а силові вимірювальні елементи виконані у вигляді струнних пр ужних розтяжок, які з'єднують плаваючу раму з корпусом. 2. Аеродинамічні ваги за п. 1, які відрізняються тим, що плаваюча рама з моделлю, яка досліджується, підвішена в корпусі аеродинамічної труби за C2 2 (11) 1 3 83141 Иностр. литер., 1955. 4. Горшенин Д.С., Мартынов А.К. Методы и задачи практической аэродинамики. М. Ма шиностроение, 1977]. По кількості компонентів сили і моменту, які вимірюються, аеродинамічні ваги розділяють на однокомпонентні, двохкомпонентні, трьохкомпонентні та шестикомпонентні. Найбільш важливою вимогою правильного конструювання багатокомпонентних аеродинамічних вагів є незалежність вимірювання компонентів сили та моменту. Кожний елемент вагів, виконаних у відповідності до традиційної схеми, повинен вимірювати тільки відповідну складову вектора сили та моменту, прикладених до моделі в потоці повітря, і не повинен реагувати на інші складові. Цю вимогу в відомих схемах аеродинамічних вагів дуже складно задовольнити. Незалежно від типу аеродинамічних вагів можна виділити деякі конструктивно-функціональні елементи, які є загальними для усіх типів вагів. До них відносяться: пристрої для підтримки моделі в потоці повітря, плаваюча рама, яка необхідна для закріплення пристроїв підтримки моделі та сприйняття сил та моментів, прикладених до моделі, механічна система для розкладання сил, прикладених до плаваючої рами, силові вимірювальні елементи, механізм для зміни кутів орієнтації моделі відносно потоку повітря. Пристрої для підтримки моделі в потоці повітря можуть бути з жорсткою та гнучкою підвіскою моделі. В іншому випадку модель закріплюється за допомогою дротів, тросів та стрічок, натяжіння яких забезпечується допоміжними (додатковими) грузами та пружинами. До гнучких тяг системи підвіски моделі підвішені контргрузи, які забезпечують необхідну попередню загрузку моделі, що досліджується. Ме ханічна система для розкладання сил частіше всього являє собою багатоланковий шарнірний механізм і служить для виділення компонентів векторів аеродинамічних сили і моменту, прикладених до моделі в потоці повітря і таких, що передаються плаваючій рамі. Кінематичну схему системи для розкладання сил, розміри ланок, положення в повітрі шарнірних опор підбирають таким чином, щоб забезпечити незалежність вимірювання компонентів сили і моменту. Вимірювання складових аеродинамічних сил і моментів виконується шляхом визначення реакцій у відповідних ланках механізму розкладення сил, потрібних для запобігання поступальних та обертових переміщень моделі. Ці реакції вимірюються силовими (ваговими) вимірювальними елементами. Силові вимірювальні елементи в системі ручного визначення сил являють собою коромисло з двома рухомими вантажами для кожного компонента сили. Найбільш широке розповсюдження отримала система, в якій в якості силових елементів використовують гирі визначеної ваги. В деяких випадках в якості джерела сили, яка урівноважує коромисло, використовують пружини. В цьому випадку сила, яка прикладена збоку плаваючої рами, визначається шляхом вимірювання величини стиснення пружини, що має місце при відновленні рівноваги вагів. Діапазон зусиль, які вимірюються, можливо змінити, шляхом заміни пружин з різними значеннями жорсткості. 4 В інших випадках в якості силових елементів використовують сильфони. Зусилля, яке прикладене, урівноважується шляхом регулювання тиску газу усередині сильфона. Тиск вимірюється за допомогою манометра. Використовують також електричні силові елементи, за допомогою яких забезпечується урівноважування сил. Відомі схеми аеродинамічних вагів з силовими елементами, які самоврівноважуються. В цьому випадку кожна компонента векторів аеродинамічних сили і момента, прикладених до моделі, вимірюється за допомогою окремого автоматичного ричажного силового елемента. Він вміщує ричаг, який спирається на опору за допомогою призми, пристрій для вимірювання кута наклону ричага під дією на нього сили, реверсивний електродвигун, ходовий гвинт, який обертається за допомогою двигуна, гр уз, зв'язаний з ходовим гвинтом, при обертанні якого він переміщується і врівноважує ричаг на опорі. Переміщення груза є функцією величини сили, прикладеної до ричага збоку моделі. В тих випадках, коли переміщення моделі, яка досліджується, повинні бути малими, використовують електричні тензометри в якості вимірювачів зусиль. Ці пристрої перетворюють величину деформації елемента системи закріплення моделі в зміну електричного опору, ємності або індуктивності, що обумовлює вид ви хідного сигналу електричної схеми. Найбільш часто використовують проволочні тензометри опору, які реагують на деформацію дроту. В таких тензометрах найбільш серйозні похибки виникають із-за впливу вологості та температури оточуючого повітря на характеристики вимірювача, що тим більш важливо в процесі обдува моделі в аеродинамічній трубі. Інші похибки виникають внаслідок наявності початкових напружень і навантажень в елементах, на яких розміщені тензометри, коливань електричного струму джерела живлення. До недоліків подібної схеми можна віднести також необхідність перенастроювання системи вимірювальних елементів при зміні моделі, яка досліджується. В якості прототипа розглядаються шестикомпонентні автоматичні аеродинамічні ваги [Горшенин Д.С., Мартынов А.К. - Методы и задачи практической аэродинамики. М. Машиностроение, 1977. Прикладная аэродинамика / Ред. Н.Т. Краснов. М. Высшая школа, 1974. Фабрикант Н.Я. Аэродинамика. М. Наука, 1964]. Основні суттєві недоліки вказаної схеми аеродинамічних вагів: виключна складність та громіздкість конструкції внаслідок наявності багатоланкового механізму розкладення результуючої аеродинамічних сил; використання окремого силового елемента для вимірювання кожної компоненти сили та моменту; наявність суттєви х перехресних зв'язків в системі підвісу моделі внаслідок взаємовпливів каналів; виключна складність та низька точність автоматизації вимірювань аеродинамічних сил і моментів (для кожної компоненти сили і моменту необхідно використовува ти окремий автоматичний ричажний ваговий елемент як складний електромеханічний пристрій); тривале перенастроювання при зміні моделі або її параметрів (необхідно підбирати 5 83141 розміри ланок і положення шарнірних опор механізму розкладення сил для забезпечення незалежності вимірів компонент сил та моментів); необхідність використання складної системи расчалок, які забезпечують визначене положення плаваючої рами з моделлю в робочій зоні; шестикомпонентні ваги повинні бути розташовані нижче робочої частини аеродинамічної труби в заглибленні підлоги, ускладнює конструкцію всієї системи. Задача, яка поставлена - спрощення конструкції аеродинамічних вагів, використання єдиного вузла і системи перетворення сил та моментів в електричні сигнали для вимірювання всіх компонентів векторів аеродинамічних сили і моменту, прикладених до моделі, зменшення похибок вимірювань шляхом ліквідації перехресних механічних зв'язків між каналами, досягнення повної автоматизації вимірювань та визначення сил та моментів, виключення процесу перенастроювання вагів при заміні моделі. Задача, яка поставлена, досягається тим, що в аеродинамічних вагах, що містять корпус, модель, яка досліджується і розміщена в потоці повітря або газу, пристрої, що підтримують модель, плаваючу раму, яка використовується для закріплення підтримуючих пристроїв і моделі та для сприйняття сил та моментів, прикладених до моделі, силові вимірювальні елементи, механізм для зміни кутів орієнтації моделі відносно потоку повітря, плаваюча рама відповідно до винаходу виконана у вигляді тримірної жорсткої тонкострижньової конструкції, яка не спотворює характер потоку повітря або газу, і несе закріплену усередині неї за допомогою механізму для зміни кутів орієнтації і підтримуючих пристроїв модель, яка досліджується, а силові вимірювальні елементи виконані у вигляді струнних пружних розтяжок, які з'єднують плаваючу раму з корпусом. Задача, яка поставлена, досягається також тим, що плаваюча рама з моделлю, яка досліджується, підвішена в корпусі аеродинамічної труби за допомогою восьми ідентичних гр уп стр унних пружних розтяжок, кожна з яких одним своїм кінцем закріплена на вершині плаваючої рами, а другим - на корпусі аеродинамічної труби, та розміщена паралельно одній з осей ортогональної системи координат, жорстко зв'язаної з плаваючою рамою, причому кожна група вміщує три стр унних пр ужних розтяжки, а кожна розтяжка розташована в полі постійного магніту і є елементом автогенератора електричних коливань. Задача, яка поставлена, досягається також тим, що в схему аеродинамічних вагів введена система обробки інформації, яка включає двадцять чотири ідентичних канали, кожний з яких складається з автогенератора, блока узгодження, пристрою керування перетворювачем, перетворювача кількості імпульсів в код, генератора заповнюючих імпульсів та вихідного буферного регістру, причому вихід автогенератора, який включає до свого складу струнну пружну розтяжку як чутливий елемент, з'єднаний зі входом блока узгодження, послідовно зв'язаного з пристроєм керування, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код, а другий вихід - до першого керуючого входу ви хідного буферно 6 го регістра, з інформаційним входом якого з'єднаний вихід перетворювача кількості імпульсів в код, а другий керуючий вхід вихідного буферного регістра з'єднаний з вихідним портом обчислювального пристрою, причому другий вхід перетворювача кількості імпульсів в код зв'язаний з виходом генератора заповнюючих імпульсів, а вихід вихідного буферного регістра з'єднаний з відповідним портом обчислювального пристрою. На фіг. 1 наведена спрощена конструктивнокомпоновочна схема аеродинамічних вагів, на фіг. 2 - блок-схема одного з двадцяти чотирьох ідентичних каналів системи попередньої обробки інформації, що формується за допомогою струнних пружних розтяжок як силових вимірювальних елементів, на фіг. 3 - графіки вхідних та вихідних сигналів блоків системи попередньої обробки інформації. Аеродинамічні ваги (фіг. 1) містять корпус 1, плаваючу раму 2, виконану у вигляді трьохмірної жорсткої тонкострижньової конструкції, розташовану певним чином відносно сопла 3 аеродинамічної труби та потоку повітря. На рамі розміщені модель 4, яка досліджується та знаходиться в потоці повітря, і пристрої 5, які підтримують модель і виконують функції механізму для зміни кутів орієнтації моделі в потоці. В вершинах рами 2 розташовані вузли 6, 7, 8, 9, 10, 11, 12, 13 закріплення вагових вимірювальних елементів на рамі, за допомогою яких вона підвішена в корпусі 1. Силові вимірювальні елементи виконані у вигляді струнних пружних розтяжок, об'єднаних у вісім груп: перша група - розтяжки 14, 15, 16, друга група розтяжки 17, 18, 19, третя група - розтяжки 20, 21, 22, четверта група - розтяжки 23, 24, 25, п'ята група - розтяжки 26, 27, 28, шоста група - розтяжки 29, 30, 31, сьома група - розтяжки 32, 33, 34, восьма група - розтяжки 35, 36, 37(розтяжки 27, 28, 35,36, 37 на фіг. 1 є невидимими). Кожна струнна пружна розтяжка своїми торцями з'єднана з вузлами 6-13 закріплення розтяжок на рамі 2 та вузлами 38-61 закріплення розтяжок на корпусі 1 (вузли 50, 51, 52, 59, 60, 61 на фіг. 1 є невидимими). Кожна струна пружна розтяжка 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37 знаходиться в магнітному полі збудніків коливань (магнітів) 62, 63, 64, 65, 66, 67, 68, 69, 70, 71, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 83, 84, 85 відповідно. На фіг. 1 показаний один магніт 62, інші магніти системи збудження умовно не показані. Всі струнні пружні розтяжки 14-37 в початковому стані (в статичному режимі) мають попередній (початковий) натяг, при цьому власні частоти поперечних коливань розтяжок в полі магнітів 6285 співпадають. Аеродинамічні ваги містять двадцять чотири ідентичних схем попередньої обробки інформації. На фіг. 2 представлена схема попередньої обробки інформації струнної пружної розтяжки 14, інші схеми попередньої обробки інформації розтяжок 15-37 цілком співпадають з тією, яка розглядається. Для забезпечення (підтримки) поперечних коливань струнної пружної розтяжки 14, закріпленої 7 83141 8 за допомогою вузлів 6 та 38 і розміщеної в магнітному полі збудника коливань (магніту 62), служить електронний автогенератор 86. Обробка вихідного сигналу автогенератора 86, який містить корисну інформацію, здійснюється за допомогою блока узгодження 87, пристрою 88 керування перетворювачем та перетворювача 89 частоти змінного сигналу (кількості імпульсів) в код з використанням генератора 90 заповнюючих імпульсів. Вихідна корисна інформація зберігається в вихідному буферному регістрі 91 перед подальшим перетворюванням за допомогою обчислювальних засобів. З вихідного регістру 91 інформація в кодовому вигляді видається за допомогою шини 92. Вхід 93 вихідного буферного регістру 91 призначений для подачі керуючого сигналу зчитування (виборки) інформації. Схеми попередньої обробки інформації вимірювача реалізуються на базі частотнонеперервних і цифрових функціональних елементів. Для основної обробки інформації у відповідності до спеціальних алгоритмів та формування вихідних сигналів можливе використання мікроконтролера або мікропроцесорної системи. Аеродинамічні ваги працюють таким чином. В початковому стані плаваюча рама 2 з моделлю 4 є врівноваженою за допомогою струнних пружних розтяжок 14-37 і займає певне положення в корпусі 1. В процесі дослідження моделі 4 в потоці газу виникають аеродинамічні сили і моменти, прикладені до моделі 4 і відповідно - до плаваючої рами 2. Систему "плаваюча рама 2 - модель 4 елементи підвісу 5" можна представити як одне тверде тіло з масою m, зосередженою в точці О, яка є початком ортогональної системи координат OXYZ, яка жорстко зв'язана з рамою 2. Під дією аеродинамічних сил і моментів стан рами 2, а значить системи координат OXYZ, буде змінюватись відносно початкового. В будь-який момент часу стан системи координат OXYZ можливо описати за допомогою узагальнених координат X, Y, Z, які характеризують положення точки О відносно системи координат, зв'язаної з корпусом 1, та α, β, γ, які характеризують взаємне кутове положення систем координат OXYZ і зв'язаної з корпусом 1. Враховуючи характер розміщення і закріплення рами 2 в корпусі 1, можливо описати динаміку плаваючої рами 2 за допомогою шести нелінійних диференційних рівнянь - трьох рівнянь сил і трьох рівнянь моментів: ij Fh ( && , && , Z, a, b, &&, Z, Y, Z, a, b, g, X, Y, Z, a, b, g, X a , Ya , Za , MX , MY , MZ , m, JX , JY , I Z , aq , k1, k 2 , M , g, rk ) =0 , η=1, 2, …, 6, (1) X Y && && && g & & & & & & g0 де Xa, Ya, Za - проекції вектора аеродинамічних сил, прикладеного до моделі, на осі системи координат OXYZ; МX , МY, МZ - проекції вектора аеродинамічного моменту, прикладеного до моделі, на осі системи OXYZ; m - сумарна маса вузла "плаваюча рама 2 - модель 4 - елементи підвісу 5"; JX, JY, JZ моменти інерції зазначеного вузла відносно осей системи OXYZ; aq (q=1, 2, ..., 24) - коефіцієнти, які визначаються початковими значеннями довжини струнних пружних розтяжок, геометрією їх розташування відносно рами 2 і корпуса 1, коефіцієнтами жорсткості (пружності) розтяжок; k1, k2 - коефіцієнти демпфування рами 2 і моделі 4 в поступальному та обертальному русі відповідно; ij Mg0 (i, j=1, 2, 3) - ij-тий елемент матриці направляючих косинусів, яка описує взаємний кутовий стан (положення) системи координат OXYZ і системи координат, зв'язаної з корпусом 1; g - величина вектора прискорення гравітаційного поля Землі, який задається в базовій системі координат; rk (k=1, 2, 3) - k-тий елемент радіуса-вектора, який визначає положення центра мас системи «плаваюча рама 2 - модель 4 - елементи підвісу 5» відносно центру підвісу цієї системи. Параметри m, JX, JY, IZ, aq (q=1, 2, ..., 24), k1, k2, rk визначаються конструкцією рами 2 , моделі 4 та елементів підвісу 5 і є незмінними. Елементи мат риці направляючих косинусів Mij 0 (i, j=1, 2, 3) є g функціями змінних α,β,γ. В процесі функціонування аеродинамічних вагів виникають аеродинамічні сили та моменти, які прикладені до моделі 4 і обумовлюють виникнення сил, прикладених до струнних пружних розтяжок, в результаті чого виникають подовження розтяжок відносно початкової їх довжини: 0 0 Dl ij = - S 1ij X - S 2ij Y - S 3ij Z + ( S 2ij Z 0 - S 3ij Ykij )a + ( S 3ij X 0 - S1ijZ 0 )b + (S 1ij Ykij - S 2ij X 0 )g kij kij kij kij (2) де і=1, 2, ..., 8 - номер групи струнних пружних розтяжок; j=1, 2, 3 - номер розтяжки в кожній групі; S1uj, S2ij,S3ij - направляючі косинуси, які визначають положення ij-тої розтяжки в початковому стані (геометрію підвісу рами в системі координат 0 0 OXYZ, зв'язаній з рамою 2), X0 , Ykij , Zkij - коорkij динати точок закріплення ij-тої пружної розтяжки на корпусі 1 в системі, зв'язаній з корпусом. Співвідношення (2) встановлює аналітичний зв'язок між подовженням струнної пружної розтяжки і параметрами X, Y, Z, α, β, γ, які описують стан системи координат OXYZ відносно системи координат, зв'язаної з корпусом 1, з урахуванням геометрії підвісу. Кожна струнна пружна розтяжка знаходиться в магнітному полі збуджувача коливань і є елементом автогенератора (див. фіг. 2). Частота власних коливань розтяжки визначається аналітичним співвідношенням (Милохин Н.Т. Частотные датчики систем автоконтроля и управления. М.: Энергия, 1968. Проектирование датчиков для измерения механических величин. Под. ред. Е.П. Осадчего. М.: Машиностроение, 1979, с. 285331): f= n 0 2l s n = r 2 F mpl0 , (3) де n - номер гармоніки коливань пружної розтяжки; l0 - початкова довжина струнної пружної розтяжки; σ - механічне напруження в розтяжці при її розтяжінні ( s = F ); F - величина повздовжньої S сили натяжіння, яка прикладена до розтяжки; m р маса розтяжки; S - площа перетину розтяжки; ρ лінійна щільність розтяжки. В тому випадку, якщо сила натяжіння розтяж 9 83141 ки змінюється відносно початкового її значення F0 на величину ΔF, співвідношення (3) для частоти власних коливань струнної пружної розтяжки можливо представити так: f = f0 + Df = n F0 + DF , (4) 2 mpl0 де f0 - частота власних коливань розтяжки, яка відповідає силі натяжіння F0; f0+Δf - частота власних коливань розтяжки, яка відповідає силі натяжіння F0+ΔF; Δf - зміна частоти власних коливань розтяжки. Приріст (зміну) сили натяжіння розтяжки наведемо в слідуючому вигляді: ESDl DF = 0 (5) l де Δl - подовження розтяжки, яке відповідає приросту (зміні) ДЕ сили натяжіння; Е - модуль пружності матеріалу розтяжки. Тепер співвідношення (4) наведемо в наступному вигляді: f = f0 + D f = n F0 ES + Dl . (6) 0 2 mp l m p (l 0 )2 Вважаємо, що схема обробки інформації (фіг. 2) настроєна на виділення першої гармоніки коливань струнної пружної розтяжки (n=1). В цьому випадку на підставі співвідношення (6) наведемо частоту коливань ij-тої розтяжки в наступному вигляді: ö EijSij 1 æ Foij ç + Dlij ÷ . (7) ÷ 4 ç mpij l0 m pij (l0 )2 pij ij è ø В тому разі, коли в початковому стані фізичні параметри усіх розтяжок співпадають, останнє співвідношення є таким: 2 fij = ( foij + D fij )2 = ö 1 æ F0 ES ç ÷ . (8) ç m l0 + m (l0 )2 D lij ÷ 4 p è p ø Використовуючи останнє рівняння, можна сформувати співвідношення для подовження струнної пружної розтяжки у процесі вимірювань: 2 fij = ( foij + D fij )2 = 4mp (l0 )2 F0l0 . (9) ES ES При цьому враховуємо, що масовогеометричні характеристики m p, l0, E, S всіх розтяжок і сила F0 її початкового натягу є відомими і незмінними. За допомогою схеми, яка наведена на фіг. 2, здійснюється попередня обробка сигналів, які містять корисну інформацію і знімаються зі струнних пружних розтяжок плаваючої рами. На фіг. 3. наведені закони змінювання сигналу в схемі обробки інформації: SАГ - сигнал на виході ij-того автогенератора 86, SПКП - сигнал на виході пристрою 88 керування перетворювачем, SГЗІ сигнал на виході генератора заповнюючих імпульсів 90, SЛ - сигнал на вході лічильника перетворювача частоти в код 89. Обробка інформації здійснюється шляхом підрахунку кількості імпульсів генератора 90, які заповнюють половину періоду коливань сигналу автогенератора 86. Dlij = fij2 10 Гармонічно змінний сигнал 8дг з виходу автогенератора 86 надходить на вхід блоку узгодження 87, що служить для формування сигналу з необхідними параметрами (амплітуда, форма, потужність і т.і.) і узгодження виходу автогенератора 86 із входом пристрою 88 керування перетворювачем. Пристрій 88 керування перетворювачем формує сигнал SПКП, що є послідовністю імпульсів, період яких кратний періоду вихідного гармонічного сигналу автогенератора 86. Сигнал SГЗІ на виході генератора заповнюючи імпульсів 90 являє собою послідовність імпульсів з більш високою частотою проходження (fГЗІ), ніж частота fij гармонічного сигналу SАГ автогенератора 86. Частота генератора заповнюючих імпульсів 90 вибирається такою, щоб період вихідного сигналу автогенератора 86 включав таку кількість імпульсів генератора заповнюючих імпульсів 90, що забезпечувало б необхідну точність та чутливість схеми попередньої обробки інформації. Далі сигнали SГЗІ та SПКП надходять на входи перетворювача 89 кількості імпульсів в код, причому перетворювач кількості імпульсів в код містить керований лічильник, який перетворює означену кількість імпульсів за обраний проміжок часу в числовий код. Такий проміжок часу вибирається кратним періоду гармонічного сигналу SАГ автогенератора 86. Сигнал SЛ на вході лічильника має вигляд, представлений на фіг. 3. Якщо вибрати проміжок часу, що буде дорівнювати половині періоду гармонічного сигналу автогенератора 86, то кількість імпульсів за цей проміжок часу розраховується по формулі: Tij , (10) 2 де Tij = 1 - період коливань гармонічного сигfij налу ij-того автогенератора (86). Оскільки fГЗІ>>fyij співвідношення (10) можна вважати точним. Рівняння (10) можна представити у такому вигляді: nij = fГЗІ f fГЗІ або fij = ГЗІ . (11) 2 fij 2nij Повертаючись до формули (9) і використовуючи співвідношення (11), запишемо: n ij = Dlij = 4mp (l0 )2 æ fГЗІ ö F0l0 ç ÷або ES ç 2nij ÷ ES è ø 0 2 Dlij = 4mp (l ) ( fГЗІ ) 2 × 1 F0l0 . (12) 2 ES nij Оскільки характеристики перетворювача інформації плаваючої рами є постійними і відомими, співвідношення (12) можна представити так: Dlij = ES k3 2 n ij - k4 , () 2 2 mp l0 fГЗІ 0 , k 4 = F0l ES ES Таким чином, маючи інформацію про nij для кожної пружної розтяжки, у відповідності до спів де k 3 = 11 83141 відношення (2), можна сформувати систему рівнянь виду: (14) 0 0 - S1ijX - S 2ij Y - S3 ijZ + (S2 ijZ 0 ij - S 3ij Yk ij )a + ( S3 ijX0 ij - S1ij Z 0 ij)b + (S1ijYk ij - S2 ijX 0 ij)g = k k k k k3 n2 ij -k 4 (і=1, 2, ..., 8; j=1, 2, 3). Така система може включати 24 лінійних алгебраїчних рівняння відносно параметрів стану X, Y, Z, α, β, γ плаваючої рами 2 з моделлю 4. У відповідності до схем плаваючої рами і системи виділення корисного сигналу, які розглядаються, достатньо використовувати шість рівнянь з системи (14) або інформацію з шести будь-яких з 24 струнних пружних розтяжок. Практично найбільш прийнятним є варіант, коли в якості джерела інформації в процесі визначення сил і моментів використовують по одній розтяжці з кожної з 6 груп. Використання 24 струнних розтяжок системи підвісу рами обумовлює можливість формувати сукупності з шести розтяжок з надлишковістю і таким чином побудувати систему підвищення точності визначення аеродинамічних сил і моментів шляхом відповідної обробки надлишкової інформації. Так, наприклад, у відповідності до рівняння (14) можна сформувати таку систему: é a11 ê êa21 êa31 ê êa41 êa ê 51 ê ëa61 a14 a15 a16 ù é X ù ú a24 a25 a26 ú ê Y ú ê ú a34 a35 a36 ú ê Z ú ú ê ú = П ; (15) a44 a 45 a 46 ú ê a ú a54 a55 a56 ú êb ú úê ú a64 a65 a66 ú ê g ú ûë û 2 é n11 - n 21 2 n 2 - n 42 2 n 2 - n 53 2 n 2 - n 61 2 n 2 - n 73 2 n 2 - n81 2 ù (16) 22 33 41 62 83 П=ê ê n2 n2 ë 11 21 де a12 a22 a32 a42 a52 a62 n2 n2 22 42 a13 a23 a33 a43 a53 a63 n2 n2 33 53 n2 n 2 41 61 n2 n2 62 73 a11 = 2 n2 n83 81 ú ú û 1 ( S111 - S121 ) ; k3 1 1 (S211 - S 221 ) ; a13 = (S311 - S 321 ) ; k3 k3 1 0 0 a14 = ( S221Z0 21 - S211Z 011 + S311Yk11 - S321Yk21 ) ; k k k3 1 a15 = (S321 X021 - S311X 011 + S111Z011 - S121Z 021 ) ; k k k k k3 1 0 0 a16 = (S121Yk21 - S111Yk11 + S 211X011 - S 221X0 21) і k k k3 т.д. (17) Рівняння (15) можливо вирішити відносно узагальнених координат, отримавши тим самим функціональні залежності узагальнених координат від кількості імпульсів nij (і=1, 2, ..., 8; j=1, 2, 3) для кожної з розтяжок, які використовуються: [X, Y, Z, α, β, γ]T={аmn}-1П (m, n=1, 2, 3, ..., 6), (18) де {аmn}-1 - зворотна матриця по відношенню до матриці коефіцієнтів рівняння (15). Характеристики та динаміка плаваючої рами, яка розглядається, обумовлюють дуже малу тривалість перехідних процесів, що дозволяє без втрати точності використовувати для опису її стаa12 = 12 ну спрощені рівняння, справедливі для сталого режиму, отримані на підставі системи (1): Fη (X, Y, Z, α, β, γ, Xa , Ya, Za, MX, MY , MZ , m, JX, JY, IZ , aq , k1, k2 , Mij 0 , g, r k)=0 (η=1, 2, ..., 6). (19) g Оскільки параметри m, JX, ..., r k є постійними для обраної конструкції плаваючої рами і в якості змінних в рівняннях не фігур ують, представимо систему (19) в такому вигляді: Fη (X, Y, Z, α, β, γ, Xa, Ya , Za, MX , MY, MZ)=0 (η=1, 2, ..., 6). (20) Вирішення рівнянь (18) і (20) є сукупність складових Xa , Ya , Z a головного вектора Ra аеродинамічної сили та МX, МY, МZ вектора Ma аеродинамічного моменту, прикладених до моделі, які підлягають визначенню в процесі експериментів. Розглянемо процеси обробки інформації при реалізації наведеного алгоритму визначення аеродинамічних сил і моментів. За допомогою перетворювача 89 частоти електричних коливань в кодовий сигнал реалізується процес перетворення кількості імпульсів η ij (і=1, 2, ..., 8; j=1, 2, 3) в ци фровий код. Кодовий сигнал, що відповідає кількості імпульсів η ij за обраний проміжок часу, надходить на інформаційний вхід вихідного буферного регістру 91, на перший керуючий вхід якого поступає сигнал із другого ви ходу пристрою 88 керування перетворювачем 89. За допомогою цього сигналу на півперіода коливань ij-тої струнної розтяжки фіксується інформація в регістрі 91 і зберігається в ньому перед подальшою обробкою у відповідності до алгоритмів (18) та (20) обчислювального пристрою. Перед початком виборки інформації з вихідного буферного регістру 91 на його другий керуючий вхід 93 надходить сигнал з обчислювального пристрою зчитування інформації. Усі сигнали, що надходять на другий керуючий вхід ви хідних буферних регістрів усі х 24 каналів попередньої обробки інформації, представляють спільно унітарний код, тобто в будь-який момент часу тільки на одній якійсь лінії 93 є присутнім сигнал, що відповідає логічній «І». Виборка інформації здійснюється з того вихідного буферного регістру, на другий керуючий вхід якого подається «І». Вихідний кодовий сигнал подається з буферного регістру на обчислювальний пристрій по лінії 92. Таким чином, використання в аеродинамічних вагах плаваючої рами, виконаної у ви гляді тримірної жорсткої тонкострижньової конструкції, яка не спотворює характер потоку повітря, і несе закріплену усередині неї за допомогою механізму для зміни кутів орієнтації і підтримуючих пристроїв модель, що досліджується, силових вимірювальних елементів, виконаних у вигляді струнних пружних розтяжок, які з'єднують в плаваючу раму з корпусом вагів і створюють вісім ідентичних груп по три в кожній групі, а кожна розтяжка розташовується в полі постійного магніту і є елементом автогенератора електричних коливань, системи попередньої обробки сигналів, яка формує кодові цифрові сигнали, що несуть інформацію про частоту коливань кожної струнної пружної розтяжки і обумовлюють можливість обчислення аеродинамічних сил та моментів, прикладених до моделі, 13 83141 дозволяє досягти наступного позитивного результату: 1. Суттєве спрощення конструкції вагів в цілому і системи визначення сил і моментів. 2. Усунення необхідності використання складної системи расчалок, які забезпечують визначене положення плаваючої рами з моделлю в робочій зоні. 3. Усунення необхідності використання окремих силових елементів для вимірювання кожної компоненти сили та моменту шляхом введення єдиного вузла системи перетворення сил та моментів в електричні сигнали. 4. Усунення перехресних зв'язків в системі підвісу моделі та взаємовпливів каналів обробки інформації, що обумовлює зростання точності. Комп’ютерна в ерстка Д. Шев ерун 14 5. Повна автоматизація вимірювань аеродинамічних сил та моментів при забезпечені високої точності. 6. Усунення необхідності тривалого перенастроювання вагів при заміні моделі або зміни її параметрів. Використання аеродинамічних вагів, які пропонуються, в процесі дослідження моделей об'єктів різного призначення та визначення їх аеродинамічних характеристик дозволить суттєво спростити всі операції, використовувати універсальне та спрощене обладнання та вимірювальні пристрої, забезпечити високу точність визначення характеристик та автоматизувати процес дослідження шляхом використання обчислювальних засобів. Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAerodynamical balance
Автори англійськоюHordin Oleksandr Hryhorovych, Kulik Anatolii Stepanovych
Назва патенту російськоюАэродинамические весы
Автори російськоюГордин Александр Григорьевич, Кулик Анатолий Степанович
МПК / Мітки
МПК: G01M 9/00
Мітки: ваги, аеродинамічні
Код посилання
<a href="https://ua.patents.su/7-83141-aerodinamichni-vagi.html" target="_blank" rel="follow" title="База патентів України">Аеродинамічні ваги</a>
Великовантажні ваги
Номер патенту: 28122
Опубліковано: 26.11.2007
Автори: Гордін Олександр Григорович, Федоренко Олег Валерійович
МПК: G01G 19/00
Мітки: великовантажні, ваги
Формула / Реферат:
1. Великовантажні ваги, які мають вантажопідйомну платформу, закріплену на корпусі за допомогою пружного підвісу, які відрізняються тим, що платформа має чотири точки опори, які відповідно зв'язані за допомогою опорних стійок з чотирма первинними гідравлічними циліндрами з поршнями, що за допомогою гідравлічної магістралі зв'язані з вторинними гідравлічними циліндрами з мембранами, котрі в свою чергу безпосередньо зв'язані зі струнним...
Затискне пристосування поворотного типу для нанесення покриттів на аеродинамічні профілі та спосіб нанесення таких покриттів
Номер патенту: 60316
Опубліковано: 15.10.2003
Автори: Бернс Стівен М., Варселл Річард В.
МПК: C23C 14/50, B05C 13/00, B05D 1/02, B05C 11/08, C23C 14/22
Мітки: нанесення, затискне, покриттів, поворотного, спосіб, аеродинамічні, типу, пристосування, профілі, таких
Формула / Реферат:
1. Затискне пристосування для кріплення деталей, на які наносять покриття, що містить несучу конструкцію, пристрій для сполучення несучої конструкції з приводом, який обертає її навколо першої осі, і касету, яка встановлюється усередину несучої конструкції і в яку поміщається деталь, на яку наносять покриття, причому ця касета охоплює деталь зі всіх боків від її основи до її вершини і сполучена з несучою конструкцією таким чином, що вона може...
Ваги для зважування транспортних засобів
Номер патенту: 37468
Опубліковано: 15.05.2001
Автори: Фурер Олександр Мойсейович, Браз Давид Леонідович, Альтман Ілля Аронович
МПК: B60S 5/00, G01G 19/00
Мітки: засобів, транспортних, зважування, ваги
Формула / Реферат:
1. Ваги для зважування транспортних засобів, що містять установлену на нерухомій опорі опорну раму вантажоприймальну платформу, датчики для вимірювання сили, що розташовані між опорною рамою і вантажоприймальною платформою, струнки, апаратуру індикації та реєстрації, які відрізняються тим, що опорна рама виконана у вигляді пов'язаних перемичкою блоків коробчастої форми, нижні горизонтальні плити яких обладнані вертикально розташованими...
Бункерні ваги бункерної естакади доменної печі
Номер патенту: 9231
Опубліковано: 15.09.2005
Автори: Бичков Сергій Васильович, Крівченко Юрій Сергійович, Аріст Леонід Михайлович, Чорний Олександр Микитович, Литвяк Василь Григорович, Маковенко Анатолій Павлович, Андрющенко Ігор Валерійович, Банніков Юрій Григорович
МПК: G01G 19/52, C21B 7/24
Мітки: доменної, бункерні, печі, естакаді, бункерної, ваги
Формула / Реферат:
Бункерні ваги бункерної естакади доменної печі, що містять ваговимірювальні пристрої, встановлені на опорній рамі, затвор з приводом, пристрій для тарування ваг, який має захватні елементи і перевірочний пристрій з еталонним вантажем, розміщеним на рамі, які відрізняються тим, що пристрій для тарування ваг виконаний у вигляді суміщеної підвіски, прикріпленої вгорі до рами бункерних ваг, а внизу сполученої з траверсою, причому захватні...
Спосіб вимірювання ваги вантажу
Номер патенту: 53005
Опубліковано: 15.01.2003
Автори: Шабатура Юрій Васильович, Свирида Віталій Іванович
МПК: G01G 19/08
Мітки: вимірювання, вантажу, ваги, спосіб
Формула / Реферат:
Спосіб вимірювання ваги вантажу в транспортному засобі на пневматичному ходу, який полягає у визначенні частотної характеристики, за якою складають математичну модель транспортного засобу, який відрізняється тим, що додатково визначають частотну характеристику й температуру кожної шини транспортного засобу, а також значення атмосферного тиску до і після завантаження, і за результатами цих вимірювань по математичній моделі транспортного...
Попередній патент: Маятниковий креномір-сигналізатор
Наступний патент: 3-аміноциклопентанкарбоксаміди як модулятори хемокінових рецепторів
Випадковий патент: Спосіб свердловинної сейсморозвідки