Спосіб точно позиціонованого наклеювання етикеток та етикетувальна машина

Формула / Реферат
1. Спосіб точно позиціонованого наклеювання етикеток (3) на пляшки, консервні банки або подібного роду ємкості (2) відносно щонайменше однієї типової для ємкості формоутворювальної ознаки (4), з використанням щонайменше однієї системи розпізнавання зображення та обробки даних, оснащеної щонайменше однією камерою (15), за допомогою якої враховується типова для ємкості формоутворювальна ознака (4) кожної ємкості (2), яка проходить по транспортуючому елементу (8) повз камери і яка подає сигнал керування процесом наклеювання етикеток, який відрізняється тим, що за допомогою системи розпізнавання зображення та обробки даних враховують орієнтацію та/або фактичний вигляд типової для ємкості формоутворювальної ознаки (4) на кожній ємкості (2) і, виходячи з цього, момент передачі етикеток (3) на відповідну ємкість (2) налаштовують, забезпечуючи оптимальне позиціонування етикетки після наклеювання відносно типової для ємкості формоутворювальної ознаки (4).
2. Спосіб за п. 1, який відрізняється тим, що момент передачі або стартовий момент передачі відповідної етикетки (3) на ємкість (2) налаштовують залежно від швидкості транспортуючого елемента (8).
3. Спосіб за п. 1 або 2, який відрізняється тим, що за допомогою системи розпізнавання зображення та обробки даних для налаштування моменту передачі або стартового моменту визначають фактичну форму відповідної типової для ємкості формоутворювальної ознаки (4), наприклад, відстань щонайменше між двома контрольними зонами або контрольними крайками формоутворювальної ознаки.
4. Спосіб за п. 3, який відрізняється тим, що визначають відстань щонайменше двох контрольних зон або контрольних крайків, які переміщаються у напрямку (А) руху один за одним, причому ємкості (2) проводяться повз щонайменше одну камеру (15).
5. Спосіб за будь-яким з пп. 1-4, який відрізняється тим, що ємкості (2) перед розпізнаванням за допомогою щонайменше однієї камери (15) системи розпізнавання зображення та обробки даних, вирівнюють, регулюючи момент передачі етикеток із заданою орієнтацією відносно їх типової для ємкості формоутворювальної ознаки (4).
6. Спосіб за п. 5, який відрізняється тим, що вирівнювання ємкостей (2) проводять за допомогою регульованого обертання ємкостей (2) навколо осі ємкостей.
7. Спосіб за п. 6, який відрізняється тим, що ємкості (2) розташовані, відповідно, на тримачі (7) для ємкостей, який для вирівнювання виконаний з можливістю регульованого обертання за допомогою приводу навколо осі ємкості.
8. Спосіб за будь-яким з пп. 1-7, який відрізняється тим, що вирівнювання ємкостей (2) відбувається, відповідно, за допомогою оптичної ідентифікації щонайменше однієї типової для ємкості контрольної зони, наприклад, щонайменше одного типового для ємкості контрольного крайка (4.1).
9. Спосіб за п. 8, який відрізняється тим, що вирівнювання проводять з використанням системи розпізнавання зображення та обробки даних, яка має щонайменше одну камеру (13, 14).
10. Спосіб за будь-яким з пп. 1-9, який відрізняється тим, що вирівнювання ємкостей проводять щонайменше протягом двох етапів, які слідують у часі один за одним, а саме: спочатку грубе вирівнювання кожної ємкості (2) за допомогою розпізнавання відповідного фактичного положення або фактичної орієнтації типової для ємкості формоутворювальної ознаки, за допомогою порівняння цього фактичного положення із заданим положенням або із заданою орієнтацією і за допомогою повороту ємкості в задане положення, а також за допомогою подальшого точного вирівнювання знову за допомогою ідентифікації фактичного положення або фактичної орієнтації типової для ємкості формоутворювальної ознаки, за допомогою порівняння фактичного положення із заданим положенням або заданою орієнтацією і за допомогою повороту ємкості (2) в задане положення.
11. Спосіб за п. 10, який відрізняється тим, що грубе вирівнювання та точне вирівнювання проводять з використанням системи розпізнавання зображення та обробки даних щонайменше з однією камерою (13, 14).
12. Спосіб за будь-яким з пп. 1-11, який відрізняється тим, що використовують центральний пристрій керування (12) для регулюючої момент передачі системи розпізнавання зображення та обробки даних, а також щонайменше для однієї системи розпізнавання зображення та обробки даних, яка регулює вирівнювання ємкостей (2).
13. Спосіб за будь-яким з пп. 1-12, який відрізняється тим, що у ньому використовують загальну камеру (14) для системи розпізнавання зображення та обробки даних, яка регулює момент передачі етикеток, а також для системи розпізнавання зображення та обробки даних, яка регулює вирівнювання, наприклад, точне вирівнювання ємкостей (2).
14. Спосіб за будь-яким з пп. 1-13, який відрізняється тим, що етикетки (3) виконані самонаклеювальними.
15. Спосіб за будь-яким з пп. 1-14, який відрізняється тим, що використовується машина для наклеювання етикеток (1) обертального конструктивного типу, з ротором (8), який приводиться в обертальний рух навколо вертикальної осі машини, з великою кількістю передбачених по периметру ротора тримачів (7) для ємкостей, на яких ємкості (2) просуваються повз щонайменше одну з камер (13, 13.1, 13.2, 14, 15) і щонайменше одну станцію (9) нанесення етикеток.
16. Етикетувальна машина для точно позиціонованого наклеювання етикеток (3) на пляшки, консервні банки або подібного роду ємкості (2) відносно щонайменше однієї типової для ємкості формоутворювальної ознаки (4) щонайменше з однією системою розпізнавання зображення та обробки даних, щонайменше з однією камерою (15), за допомогою якої розпізнається типова для ємкості формоутворювальна ознака (4) кожної ємкості (2), яка проходить транспортуючим елементом (8) повз камеру, і ця система подає сигнал керування процесом наклеювання етикеток, і щонайменше з однією станцією (9) нанесення етикеток за траєкторією руху транспортуючого елемента (8), яка відрізняється тим, що система розпізнавання зображення та обробки даних виконана з можливістю розпізнавання орієнтації та/або фактичного виду типової для ємкості формоутворювальної ознаки (4) на кожній ємкості та генерування сигналу керування моментом передачі відповідної етикетки (3) на станції (9) нанесення етикеток.
17. Етикетувальна машина за п. 16, яка відрізняється тим, що вона виконана з можливістю налаштування моменту передачі або стартового моменту для передачі відповідної етикетки (3) на ємкість залежно від швидкості транспортуючого елемента (8).
18. Етикетувальна машина за п. 16 або 17, яка відрізняється тим, що система розпізнавання зображення та обробки даних для налаштування моменту передачі або стартового моменту виконана з можливістю визначення фактичної форми відповідної типової для ємкості формоутворювальної ознаки (4), наприклад, відстані щонайменше між двома контрольними зонами або контрольними крайками формоутворювальної ознаки.
19. Етикетувальна машина за п. 18, яка відрізняється тим, що містить розташовані на транспортуючому елементі (8) тримачі (7) для ємкостей, виконані для вирівнювання ємкостей (2) з можливістю регульованого обертання за допомогою приводу навколо осі ємкостей.
20. Етикетувальна машина за будь-яким з пп. 16-19, яка відрізняється тим, що містить засоби для вирівнювання ємкостей (2) за допомогою оптичної ідентифікації щонайменше однієї типової для ємкості контрольної зони, наприклад, щонайменше одного типового для ємкості контрольного крайка (4.1).
21. Етикетувальна машина за п. 20, яка відрізняється тим, що містить систему розпізнавання зображення та обробки даних для вирівнювання ємкостей (2) з щонайменше однією камерою (13, 14).
22. Етикетувальна машина за будь-яким з пп. 16-21, яка відрізняється тим, що містить засоби для вирівнювання ємкостей, яке відбуваються щонайменше протягом двох етапів, які слідують у часі один за одним, а саме: спочатку грубого вирівнювання кожної ємкості (2) за допомогою ідентифікації відповідного фактичного положення або фактичної орієнтації типової для ємкості формоутворювальної ознаки, за допомогою порівняння цього фактичного положення із заданим положенням або заданою орієнтацією і за допомогою повороту ємкості в задане положення, а також за допомогою подальшого точного вирівнювання за шляхом розпізнавання фактичного положення або фактичної орієнтації типової для ємкості формоутворювальної ознаки, за допомогою порівняння фактичного положення із заданим положенням або заданою орієнтацією і за допомогою повороту ємкості (2) в задане положення.
23. Етикетувальна машина за п. 22, яка відрізняється тим, що засоби для грубого вирівнювання і точного вирівнювання утворені, відповідно, за допомогою системи розпізнавання зображення та обробки даних, відповідно, щонайменше з однією камерою (13, 14).
24. Етикетувальна машина за будь-яким з пп. 1-23, яка відрізняється тим, що оснащена центральним пристроєм керування (12) для системи розпізнавання зображення та обробки даних, яка регулює момент передачі, а також щонайменше для однієї системи розпізнавання зображення та обробки даних, яка регулює вирівнювання ємкостей (2).
25. Етикетувальна машина за будь-яким з пп. 1-24, яка відрізняється тим, що оснащена загальною камерою (14) для системи розпізнавання зображення та обробки даних, яка регулює момент передачі етикеток, а також для системи розпізнавання зображення та обробки даних, яка регулює вирівнювання, наприклад, точне вирівнювання ємкостей (2).
26. Етикетувальна машина за будь-яким з пп. 1-25, яка відрізняється тим, що щонайменше одна станція нанесення етикеток (9) виконана з можливістю обробки самонаклеювальних етикеток (3).
27. Етикетувальна машина за будь-яким з пп. 1-26, яка відрізняється тим, що вона виконана у вигляді машини для наклеювання етикеток обертального типу, з ротором (8), який приводиться в обертальний рух навколо вертикальної осі машини, і з великою кількістю передбачених по периметру ротора тримачів (7) для ємкостей.
Текст
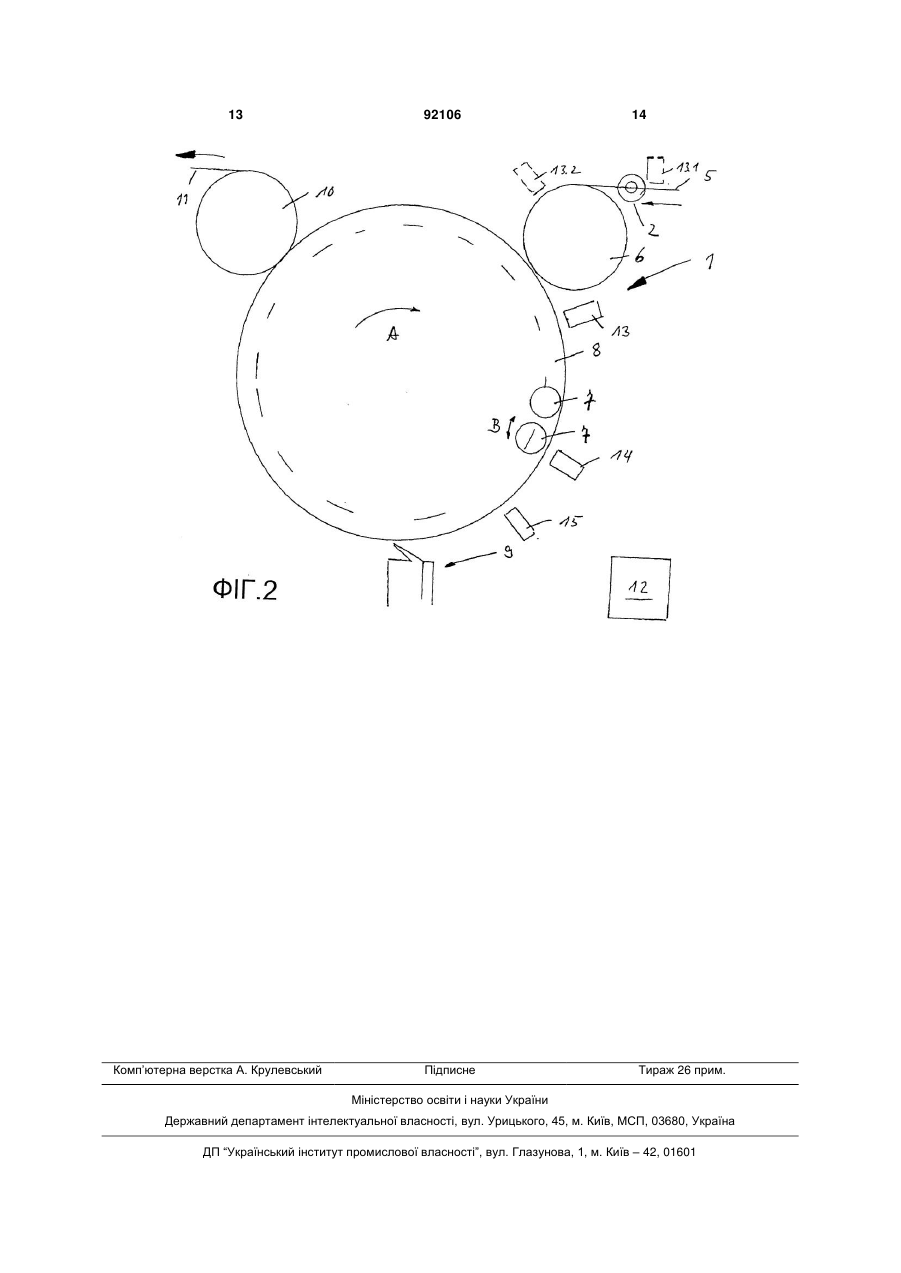
1. Спосіб точно позиціонованого наклеювання етикеток (3) на пляшки, консервні банки або подібного роду ємкості (2) відносно щонайменше однієї типової для ємкості формоутворювальної ознаки (4), з використанням щонайменше однієї системи розпізнавання зображення та обробки даних, оснащеної щонайменше однією камерою (15), за допомогою якої враховується типова для ємкості формоутворювальна ознака (4) кожної ємкості (2), яка проходить по транспортуючому елементу (8) повз камери і яка подає сигнал керування процесом наклеювання етикеток, який відрізняється тим, що за допомогою системи розпізнавання зображення та обробки даних враховують орієнтацію та/або фактичний вигляд типової для ємкості формоутворювальної ознаки (4) на кожній ємкості (2) і, виходячи з цього, момент передачі етикеток (3) на відповідну ємкість (2) налаштовують, забезпечуючи оптимальне позиціонування етикетки після наклеювання відносно типової для ємкості формоутворювальної ознаки (4). 2. Спосіб за п. 1, який відрізняється тим, що момент передачі або стартовий момент передачі відповідної етикетки (3) на ємкість (2) налаштовують залежно від швидкості транспортуючого елемента (8). 3. Спосіб за п. 1 або 2, який відрізняється тим, що за допомогою системи розпізнавання зображення та обробки даних для налаштування моменту передачі або стартового моменту визначають фактичну форму відповідної типової для ємкості формоутворювальної ознаки (4), наприклад, відстань щонайменше між двома контрольними зона 2 (19) 1 3 кості формоутворювальної ознаки, за допомогою порівняння фактичного положення із заданим положенням або заданою орієнтацією і за допомогою повороту ємкості (2) в задане положення. 11. Спосіб за п. 10, який відрізняється тим, що грубе вирівнювання та точне вирівнювання проводять з використанням системи розпізнавання зображення та обробки даних щонайменше з однією камерою (13, 14). 12. Спосіб за будь-яким з пп. 1-11, який відрізняється тим, що використовують центральний пристрій керування (12) для регулюючої момент передачі системи розпізнавання зображення та обробки даних, а також щонайменше для однієї системи розпізнавання зображення та обробки даних, яка регулює вирівнювання ємкостей (2). 13. Спосіб за будь-яким з пп. 1-12, який відрізняється тим, що у ньому використовують загальну камеру (14) для системи розпізнавання зображення та обробки даних, яка регулює момент передачі етикеток, а також для системи розпізнавання зображення та обробки даних, яка регулює вирівнювання, наприклад, точне вирівнювання ємкостей (2). 14. Спосіб за будь-яким з пп. 1-13, який відрізняється тим, що етикетки (3) виконані самонаклеювальними. 15. Спосіб за будь-яким з пп. 1-14, який відрізняється тим, що використовується машина для наклеювання етикеток (1) обертального конструктивного типу, з ротором (8), який приводиться в обертальний рух навколо вертикальної осі машини, з великою кількістю передбачених по периметру ротора тримачів (7) для ємкостей, на яких ємкості (2) просуваються повз щонайменше одну з камер (13, 13.1, 13.2, 14, 15) і щонайменше одну станцію (9) нанесення етикеток. 16. Етикетувальна машина для точно позиціонованого наклеювання етикеток (3) на пляшки, консервні банки або подібного роду ємкості (2) відносно щонайменше однієї типової для ємкості формоутворювальної ознаки (4) щонайменше з однією системою розпізнавання зображення та обробки даних, щонайменше з однією камерою (15), за допомогою якої розпізнається типова для ємкості формоутворювальна ознака (4) кожної ємкості (2), яка проходить транспортуючим елементом (8) повз камеру, і ця система подає сигнал керування процесом наклеювання етикеток, і щонайменше з однією станцією (9) нанесення етикеток за траєкторією руху транспортуючого елемента (8), яка відрізняється тим, що система розпізнавання зображення та обробки даних виконана з можливістю розпізнавання орієнтації та/або фактичного виду типової для ємкості формоутворювальної ознаки (4) на кожній ємкості та генерування сигналу керування моментом передачі відповідної етикетки (3) на станції (9) нанесення етикеток. 17. Етикетувальна машина за п. 16, яка відрізняється тим, що вона виконана з можливістю налаштування моменту передачі або стартового моменту для передачі відповідної етикетки (3) на ємкість залежно від швидкості транспортуючого елемента (8). 92106 4 18. Етикетувальна машина за п. 16 або 17, яка відрізняється тим, що система розпізнавання зображення та обробки даних для налаштування моменту передачі або стартового моменту виконана з можливістю визначення фактичної форми відповідної типової для ємкості формоутворювальної ознаки (4), наприклад, відстані щонайменше між двома контрольними зонами або контрольними крайками формоутворювальної ознаки. 19. Етикетувальна машина за п. 18, яка відрізняється тим, що містить розташовані на транспортуючому елементі (8) тримачі (7) для ємкостей, виконані для вирівнювання ємкостей (2) з можливістю регульованого обертання за допомогою приводу навколо осі ємкостей. 20. Етикетувальна машина за будь-яким з пп. 1619, яка відрізняється тим, що містить засоби для вирівнювання ємкостей (2) за допомогою оптичної ідентифікації щонайменше однієї типової для ємкості контрольної зони, наприклад, щонайменше одного типового для ємкості контрольного крайка (4.1). 21. Етикетувальна машина за п. 20, яка відрізняється тим, що містить систему розпізнавання зображення та обробки даних для вирівнювання ємкостей (2) з щонайменше однією камерою (13, 14). 22. Етикетувальна машина за будь-яким з пп. 1621, яка відрізняється тим, що містить засоби для вирівнювання ємкостей, яке відбуваються щонайменше протягом двох етапів, які слідують у часі один за одним, а саме: спочатку грубого вирівнювання кожної ємкості (2) за допомогою ідентифікації відповідного фактичного положення або фактичної орієнтації типової для ємкості формоутворювальної ознаки, за допомогою порівняння цього фактичного положення із заданим положенням або заданою орієнтацією і за допомогою повороту ємкості в задане положення, а також за допомогою подальшого точного вирівнювання за шляхом розпізнавання фактичного положення або фактичної орієнтації типової для ємкості формоутворювальної ознаки, за допомогою порівняння фактичного положення із заданим положенням або заданою орієнтацією і за допомогою повороту ємкості (2) в задане положення. 23. Етикетувальна машина за п. 22, яка відрізняється тим, що засоби для грубого вирівнювання і точного вирівнювання утворені, відповідно, за допомогою системи розпізнавання зображення та обробки даних, відповідно, щонайменше з однією камерою (13, 14). 24. Етикетувальна машина за будь-яким з пп. 1-23, яка відрізняється тим, що оснащена центральним пристроєм керування (12) для системи розпізнавання зображення та обробки даних, яка регулює момент передачі, а також щонайменше для однієї системи розпізнавання зображення та обробки даних, яка регулює вирівнювання ємкостей (2). 25. Етикетувальна машина за будь-яким з пп. 1-24, яка відрізняється тим, що оснащена загальною камерою (14) для системи розпізнавання зображення та обробки даних, яка регулює момент передачі етикеток, а також для системи розпізнаван 5 92106 6 ня зображення та обробки даних, яка регулює вирівнювання, наприклад, точне вирівнювання ємкостей (2). 26. Етикетувальна машина за будь-яким з пп. 1-25, яка відрізняється тим, що щонайменше одна станція нанесення етикеток (9) виконана з можливістю обробки самонаклеювальних етикеток (3). 27. Етикетувальна машина за будь-яким з пп. 1-26, яка відрізняється тим, що вона виконана у вигляді машини для наклеювання етикеток обертального типу, з ротором (8), який приводиться в обертальний рух навколо вертикальної осі машини, і з великою кількістю передбачених по периметру ротора тримачів (7) для ємкостей. Винахід відноситься до способу наклеювання етикеток на пляшки або на подібні до них ємкості, а також до машини для наклеювання етикеток (етикетувальної машини) за допомогою якої може бути здійснено даний спосіб. Відомі, зокрема, пляшки або подібні до них ємкості, які мають типові для ємкостей ознаки формоутворення, наприклад, типові геометричні ознаки на своїй зовнішній поверхні, такі, наприклад, як термозварені поверхні, орнаменти, тиснення, рельєфні виступи, тощо. При наклеюванні етикеток на такі ємкості необхідно наносити відповідні етикетки з високою точністю накладення відносно такого роду типових для ємкостей формоутворювальних ознак, а саме, з максимально малими допусками, наприклад, в діапазоні +/- 0,5мм і при звичайній на сьогоднішній день високій продуктивності машин для наклеювання етикеток, яка, наприклад, може становити до 60.000 ємкостей, етикетованих на годину. Вже відомими є способи, у яких ємкості, які підводяться до тримачів для пляшок, які приводяться в обертальний рух навколо вертикальної осі ротора машини для наклеювання етикеток з довільною орієнтацією відносно їх типових формоутворювальних ознак, перед наклеюванням етикеток вирівнюються за допомогою регульованого обертання тримачів для ємкостей, таким чином, щоб потім при проходженні етикетувальної станції наклеювання етикеток може здійснюватися на рівно встановлені ємкості. Вирівнювання ємкостей за допомогою обертання тримачів для ємкостей відбувається, наприклад, з використанням сигналів керування системи розпізнавання зображення та обробки даних, яка, зокрема, включає систему камер, щонайменше, з однією електронною камерою і одним відповідним освітлювальним пристроєм, обчислювальну машину, а також програмне забезпечення обробки зображення і розпізнавання зображення. За допомогою системи камер враховуються характерні зони, або контрольні зони, або контрольні кромки відповідної типової для ємкості формоутворювальної ознаки і за допомогою порівняння зображень, тобто за допомогою порівняння фактичного значення і заданого значення, визначається необхідний для вирівнювання кут повороту тримача для ємкості і останній обертається на визначений кут повороту. Типовими для ємкостей формоутворювальними ознаками є при цьому, наприклад, форма відповідної ємкості та/або геометрична, типова для ємкості ознака на зовнішній поверхні ємкості, така, наприклад, як термозварені поверхні, орнаменти, тиснення, рельєфні виступи і таке інше. Кількість необхідних для системи камер залежить, зокрема, від властивостей оброблюваних ємкостей (наприклад, матеріал, прозорість або непрозорість, колір, поверхня або структура поверхні, наповнення і таке інше). За допомогою даного відомого способу можливе вирівнювання ємкостей за їхніми формоутворювальними ознаками перед подальшим наклеюванням етикеток, але отримана таким чином точність позиціонування етикеток відносно типових для ємкостей формоутворювальних ознак обмежена вузькими рамками, так що досяжна точність часто не задовольняє зростаючим вимогам сьогоднішнього дня. Зокрема, при концентричному нанесенні етикеток, наприклад, усередині термозвареного клейма або термозвареної поверхні зовні навіть найменші відхилення сильно впадають в очі і сприймаються як серйозний недолік. Причин існування таких відхилень багато, а саме, зокрема: допуски всередині ємкостей, які виникли, наприклад, в процесі виготовлення ємкостей; ємкість, на яку наноситься етикетка, при вирівнюванні лише частково слідує за обертальним рухом тримача для ємкості, і саме внаслідок просковзування між тримачем для ємкості і самою ємкістю, зокрема, унаслідок забруднення та/або вологості самої ємкості та/або тримача для ємкостей, таким чином, при вирівнюванні виявляється відхилення від заданого положення. Останнє становить проблему, зокрема, і через те, що для вирівнювання, як правило, може бути використаний лише порівняно невеликий кут обертального руху ротора і, таким чином, зокрема, при високій продуктивності, лише дуже невеликий проміжок часу, так що вирівнювання повинне проводитися з відносно високими обертальними або кутовими прискореннями. Технічним результатом даного винаходу є отримання високоточного наклеювання етикеток на пляшки, консервні банки або подібного роду ємкості, відносно типових для ємкостей формоутворювальних ознак, зокрема, відносно типових геометричних ознак на поверхні ємкостей. Особливість способу запропонованого винаходом полягає в тому, що стартовий момент або момент передачі, в який відбувається передача відповідної етикетки до ємкості, яка проходить повз етикетувальну станцію, налаштовується залежно від орієнтації та/або фактичного вигляду, тобто, наприклад, від розміру та/або форми відповідної типової для ємкості формоутворювальної ознаки, а саме, за допомогою відповідного налаш 7 тування етикетувальної станції і без вирівнювального або обертального руху ємкостей. Налаштування стартового моменту або моменту передачі відбувається з використанням системи розпізнавання зображення або обробки даних, яка враховує типову для ємкості формоутворювальну ознаку кожної ємкості і за допомогою аналізу або обробки відповідного зображення таким чином ініціює налаштування стартового моменту або моменту передачі або етикетувальної станції, що етикетка передається потім на відповідні ємкості з високою точністю відносно своєї типової для ємкості формоутворювальної ознаки і наклеюється на ці ємкості. Варіанти здійснення винаходу є предметом подальших залежних пунктів формули винаходу. Винахід роз'яснюється далі детальніше на прикладі здійснення винаходу спираючись на креслення, на яких представлено: Фіг. 1 - в спрощеному зображенні і на вигляді збоку ємкості у формі пляшки з типовою геометричною ознакою на зовнішній поверхні, а саме з термозвареною поверхнею; Фіг. 2 - в спрощеному зображенні і на вигляді зверху етикетувальна машина конструктивного типу, яка обертається, для наклеювання етикеток на пляшки в зоні їх зовнішньої поверхні, забезпеченої типовою геометричною ознакою. Позначена на Фіг. 2 в цілому позицією 1 етикетувальна машина конструктивного типу, яка обертається, призначена для наклеювання етикеток на пляшку 2, тобто для наклеювання етикеток 3 на периферійну поверхню пляшки 2 з максимально точним вирівнюванням відносно типової або характерної геометричної ознаки 4, наявність якої передбачено на зовнішній поверхні пляшки 2. У представленому варіанті здійснення винаходу цією геометричною ознакою 4 є термозварена поверхня, на якій відповідна етикетка 3 повинна знаходитися точно по середині. Геометрична ознака 4, відносно якої з високою точністю повинне проводитися наклеювання етикеток 3, може мати і інше виконання, наприклад, у формі орнаменту, тиснення, рельєфного виступу на зовнішній поверхні і таке інше. Призначені для наклеювання етикеток пляшки 2 підводяться до машини для наклеювання етикеток 1 у вертикальному положенні, тобто з орієнтуванням осей пляшок або ємкостей у вертикальному напрямку, за допомогою транспортера 5, у вигляді однопотічного потоку пляшок, і потрапляють потім через подаючу зірочку 6, яка слугує входом для пляшок або ємкостей, відповідно, на тримач 7 для пляшок або ємкостей, який спільно з великою кількістю однорідних тримачів для ємкостей передбачений по периметру ротора 8 (стрілка А) , який приводиться в обертальний рух довкола вертикальної осі машини. Кожна пляшка 2 на своєму тримачі 7 для пляшок шляхом обертання цього тримача для пляшок навколо вертикальної осі тримача для пляшок (подвійні стрілки В на Фіг. 2) точно вирівнюється відносно геометричної ознаки 4 і, таким чином, за допомогою ротора 8, який обертається, просувається повз етикетувальну станцію 9, на якій відпо 92106 8 відна етикетка 3 передньою кромкою 3.1 передається на пляшку, яка просувається повз етикетувальну станцію 9, і саме таким чином, відповідна етикетка 3 після остаточного притискання до пляшки 2 має бажане позиціонування з високою точністю відносно геометричної ознаки 4, тобто відповідна етикетка 3 розташовується, наприклад, по середині термозвареної поверхні, яка утворює геометричну ознаку, рельєфної або такої, яка обрамлена потовщеним краєм. Етикетувальна станція 9 в представленому прикладі здійснення винаходу утворена для обробки самонаклеювальних етикеток 3. Використання інших етикетувальних станцій або агрегатів, наприклад, для нанесення етикеток 3 з використанням клею, також може бути застосованим відповідно до даного винаходу. Пляшки 2 з нанесеними на них етикетками, за допомогою ротора 8 і через подаючу зірочку 10, яка утворює вихід для пляшок або ємкостей, потрапляють на транспортер 11 і по ньому підводяться для подальшого використання, наприклад, до пакувальної машини. Тримачами 7 для пляшок є, наприклад, диски для пляшок, на які пляшки 2 встановлюються своїм денцем. Можливі також і інші варіанти втілення тримачів 7 для пляшок, наприклад, такої форми, яка забезпечує утримування пляшок 2 на цих тримачах 7 для пляшок, відповідно, в підвішеному стані. Для вирівнювання пляшок 2, які проводяться транспортером 5 з довільною орієнтацією відносно своїх геометричних ознак 4, окремі тримачі 7 для пляшок оснащені, відповідно, своїм власним регульованим сервоприводом або приводом механізму повороту, за допомогою якого здійснюється керований обертальний рух навколо вертикальної осі транспортуючих тримачів, відповідно до подвійної стрілки В. Окремі приводні механізми тримачів 7 для пляшок керуються за допомогою центрального пристрою 12 керування (центральної обчислювальної машини), а саме залежно від сигналів потрійної системи камер, яка, відповідно, схематично позначена за допомогою відеокамер 13, 14 і 15. Камери 13-15 передбачені, відповідно, за траєкторією руху встановлених на тримачах 7 пляшок 2, недалеко від периметра ротора 8, але не переміщаються разом з ним між подаючою зірочкою 5 і етикетувальною станцією 9. Камери 13-15 орієнтовані надалі таким чином, що ними, на кожній пляшці 2, яка проходить мимо, у будь-якому випадку обсервується зона, яка несе типову геометричну ознаку 4. Надалі камери 13-15 є складовою частиною системи обробки і розпізнавання зображення, яка охоплює, зокрема, відповідні камери 13-15, відповідні освітлювальні пристрої, обчислювальну машину, яка є, наприклад, центральним пристроєм керування або центральною обчислювальною машиною 12, а також інстальоване на цій обчислювальній машині програмне забезпечення обробки зображення і розпізнавання зображення. Кожна передана з транспортуючої зірочки 5 на один з тримачів 7 пляшка 2 проходить спочатку камеру 13. За допомогою даної камери, чи точніше, за допомогою систем розпізнавання зображення та обробки даних, частиною якої є ця камера 13 визначається фактичне положення типової 9 геометричної ознаки 4 пляшки 2, яка проходить мимо, а потім пристроєм 12 керування подається сигнал керування, для налаштування відповідного тримача для пляшок, і саме таким чином, щоб відповідна пляшка 2 бажано за допомогою найкоротшого повороту приводилася в задане положення або в положення заданої орієнтації, і притому з максимально високою точністю. Щонайменше, заздалегідь орієнтовані, таким чином, відносно своїх типових геометричних ознак 4, тобто, наприклад, орієнтовані радіально назовні відносно вертикальної осі ротора або машини, пляшки 2 проходять потім камеру 14, за допомогою якої ще раз визначається фактична орієнтація типової геометричної ознаки 4, так що потім може проводитися подальше вирівнювання (точне вирівнювання) кожної пляшки 2 за допомогою обертання відповідного тримача 7 для пляшок, тобто за допомогою регульованого активування відповідного сервоприводу. Кут відкриття оптики камери 14 бажано вибраний при цьому таким чином, що полем огляду даної камери на відміну від камери 13 охоплюється, відповідно, не вся пляшка 2 або більша частина зовнішньої поверхні пляшки 2, а, в основному, тільки типова геометрична ознака 4 кожної з пляшок 2 в зоні того видимого елементу, який використовується для вирівнювання, наприклад, того краю 4.1 геометричної ознаки 4, який випереджає відносно напрямку А обертання ротора 8. За допомогою системи розпізнавання зображення та обробки даних, яка включає камеру 14, визначається лише положення геометричної ознаки кожної пляшки 2; сама ознака або можливі відхилення утворення даної ознаки, наприклад, відхилення від форми та/або розміру, не враховуються системами розпізнавання зображення та обробки даних, які включають камери 13 і 14. За допомогою камери 15 додатково до орієнтації типової геометричної ознаки 4 кожної з пляшок 2, що проходить мимо, враховується також і фактичний вигляд, тобто, наприклад, форма та/або розмір цієї ознаки. На підставі отриманого з цієї камери зображення в системі розпізнавання зображення та обробки даних, яка включає камеру 15, цей фактичний вигляд відповідної ознаки 4 аналізується або вимірюється, і, наприклад, за допомогою порівняння з відповідним, закладеним в системі, тобто в пристрої 12 керування, значенням (фактичне значення) на етикетувальній станції 9, час передачі відповідної етикетки 3 на відповідну пляшку 2, яка проходить повз, налаштовується таким чином, що етикетка 3 після нанесення, не дивлячись на відхилення відповідної геометричної ознаки 4 від оптимального вигляду, наприклад, за формою та/або розміром, не дивлячись на не оптимальне вирівнювання і таке інше, оптично вирівняна максимально точно відносно ознаки 4, тобто при геометричній ознаці 4, яка має вигляд термозвареної поверхні, нанесена точно по середині на термозварену поверхню. Таке налаштування моменту часу передачі відповідної етикетки 3 проводиться без повороту тримача 7 для пляшок. При цьому слід розуміти, проте, що момент передачі або стартовий момент для передачі відповідної 92106 10 етикетки 3 на пляшку 2 визначається також з урахуванням актуальної швидкості обертання ротора 8. Винахід описувався раніше на прикладі здійснення. При цьому варто враховувати, що можливими є зміни, а також варіації. Так, наприклад, можливо передбачити камеру 13 вже в зоні входу для ємкостей або пляшок машини для наклеювання етикеток 1, як це позначено на Фіг. 2 позицією 13.1 або 13.2, і притому, наприклад, в положенні транспортера 5 у напрямку транспортування перед подаючою зірочкою 6 (камера 13.1), якщо за допомогою відповідних заходів, наприклад, за допомогою застосування затискних пристроїв або затискних пальців гарантовано, що пляшки 2 після проходження камери 13.1 не зможуть більше довільно обертатися навколо своєї вертикальної осі. Логічним було б передбачити камеру 13 в зоні подаючої зірочки 6 і, як позначено позицією 13.2, якщо, щонайменше, на подаючій зірочці 6 за допомогою відповідних заходів, наприклад, за допомогою використання затискного пальця і такого іншого, заблоковано довільне обертання пляшок 2 навколо своєї вертикальної осі. Далі, є також можливість, зокрема, наприклад, при обробці пляшок з особливо просто розпізнаваною геометрією, проводити точне вирівнювання, як воно описане вище у зв'язку з камерою 14 і з відповідною системою розпізнавання зображення та обробки даних, і налаштування моменту передачі або стартового моменту для передачі етикеток, залежно від врахованої фактичної орієнтації або вигляду відповідної геометричної ознаки 4 при використанні загальної камери, наприклад, камери 14. При такому способі дії необхідність, наприклад, в камері 15 відпадала б. Отримане камерою 14 зображення використовується потім спочатку для точного вирівнювання, а потім також і для налаштування моменту передачі відповідної етикетки 3. Цей варіант втілення має, зокрема, перевагу в тому, що за відсутності однієї камери кут повороту між камерою, яка використовується для точного вирівнювання і для визначення моменту передачі етикетки і етикетувальною станцією 9 збільшується, так що, зокрема, час, наявний в розпорядженні для здійснення точного вирівнювання, збільшується. Таким чином, і за високої продуктивності машини для наклеювання етикеток 1 (кількість пляшок 2, на які нанесено етикетки, за одиницю часу), і при високому числі оборотів ротора 8 прискорення (прискорення обертання) при повороті або вирівнюванні тримачів 7 для пляшок знижуються настільки, що при точному вирівнюванні запобігається зумовленому інерцією пляшок 2 просковзуванню між відповідним тримачем 7 для пляшок і передбаченою на нім пляшкою 2. Винахід був пояснений вище на базі машини для наклеювання етикеток 1 для наклеювання етикеток на пляшки 2. Само собою зрозуміло, що вищеописаним способом можуть наноситись етикетки і на інші ємкості, наприклад, консервні банки. ПОЗНАЧЕННЯ 1 машина для наклеювання етикеток 2 пляшка 3 етикетка 11 3.1 кінець етикетки 4 типова геометрична ознака 5 транспортер 6 подаюча зірочка 7 тримач для ємкостей 8 ротор 9 етикетувальна станція або етикетувальний агрегат 10 транспортуюча зірочка 92106 12 11 транспортер 12 центральний пристрій керування або центральна обчислювальна машина 13, 13.1, 13.2 камера 14, 15 камера А напрямок обертання ротора 8 В обертальний рух тримача 7 для ємкостей при вирівнюванні пляшок 2 13 Комп’ютерна верстка А. Крулевський 92106 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for positionally accurate application of labels and labeling machine
Автори англійськоюPutzer, Frank
Назва патенту російськоюСпособ точно позиционированного наклеивания этикеток и этикетировочная машина
Автори російськоюПутцер Франк
МПК / Мітки
МПК: B65C 9/00
Мітки: наклеювання, машина, спосіб, точної, позиціонованого, етикетувальна, етикеток
Код посилання
<a href="https://ua.patents.su/7-92106-sposib-tochno-pozicionovanogo-nakleyuvannya-etiketok-ta-etiketuvalna-mashina.html" target="_blank" rel="follow" title="База патентів України">Спосіб точно позиціонованого наклеювання етикеток та етикетувальна машина</a>
Машина етикетувальна
Номер патенту: 6920
Опубліковано: 16.05.2005
Автори: Костінський Іван Захарович, Барінов Сергій Павлович, Журба Володимир Миколаєвич
МПК: B65C 9/00
Мітки: машина, етикетувальна
Формула / Реферат:
Машина етикетувальна, що містить транспортер для підведення та відведення ємностей, пристрій для розділення ємностей, оснащений привідною зірочкою, привідний вакуумний барабан, пристрої для подання безперервної етикетувальної стрічки з бобіни на поверхню привідного вакуумного барабана, для подання і нанесення клею на поверхню етикетувальної стрічки, перерізання її на окремі етикетки та відриву їх, обкочувальну пластину та пристрої для...
Машина етикетувальна

Номер патенту: 8256
Опубліковано: 15.07.2005
Автори: Костінський Іван Захарович, Журба Володимир Миколаєвич, Барінов Сергій Павлович
МПК: B65C 9/00
Мітки: етикетувальна, машина
Формула / Реферат:
Машина етикетувальна, яка складається з плити, на якій змонтовані привідний вакуумний барабан, пристрої для подання безперервної етикетувальної стрічки з бобіни на поверхню привідного вакуумного барабана, пристрої для подання та нанесення клею на її поверхню, пристрої для перерізання етикетувальної стрічки на окремі етикетки, пристрої для підведення ємностей для нанесення на них етикеток, пристрої для притиснення етикетки до ємності і для...
Машина етикетувальна
Номер патенту: 10042
Опубліковано: 17.10.2005
Автори: Журба Володимир Миколаєвич, Костінський Іван Захарович, Барінов Сергій Павлович
МПК: B65C 9/00
Мітки: машина, етикетувальна
Формула / Реферат:
Машина етикетувальна, що складається з плити, на якій змонтовані привідний вакуумний барабан, пристрої подання безперервної етикетувальної стрічки з бобіни на поверхню привідного вакуумного барабана для подання та нанесення клею на її поверхню, для перерізання етикетувальної стрічки на окремі етикетки, пристроїв для підведення ємностей для нанесення на них етикеток, для притиснення етикетки до ємності і для виведення ємностей з приклеєною...
Машина етикетувальна
Номер патенту: 6952
Опубліковано: 16.05.2005
Автори: Журба Володимир Миколаєвич, Костінський Іван Захарович, Барінов Сергій Павлович
МПК: B65C 9/08
Мітки: етикетувальна, машина
Формула / Реферат:
Машина етикетувальна, яка включає привідний вакуумний барабан, пристрої для подання етикетувальної стрічки з бобіни на поверхню вакуумного барабана, для подання та нанесення клею на її поверхню, для перерізування етикетувальної стрічки на окремі етикетки та відриву їх, для підведення ємностей до позиції нанесення на них етикетки, притиснення етикетки до ємності та відведення ємності з приклеєною етикеткою, а також пристрої для приводу,...
Спосіб нанесення на ємності етикеток з безперервної полімерної стрічки та машина для його здійснення
Номер патенту: 76793
Опубліковано: 15.09.2006
Автор: Журавльов Сергій Олександрович
МПК: B65C 3/00
Мітки: спосіб, машина, полімерної, нанесення, ємності, здійснення, стрічки, безперервної, етикеток
Формула / Реферат:
1. Спосіб нанесення на ємності етикеток з безперервної полімерної стрічки, який включає подання етикетувальної стрічки з бобіни на поверхню вакуумного барабана, нанесення клею на етикетувальну стрічку, перерізання етикетувальної стрічки на окремі етикетки, підведення ємностей до позиції нанесення на них етикетки, притиснення етикетки до ємності та відведення ємностей з приклеєною етикеткою, який відрізняється тим, що в зоні, розташованій...
Попередній патент: Установка очищення води
Наступний патент: Композиційний матеріал для заповнення деформаційних швів мостів, естакад та шляхопроводів
Випадковий патент: Керований літальний апарат