Моторний плавзасіб з пристроєм керування
Формула / Реферат
1. Моторний плавзасіб з пристроєм (1) керування і з вузлом (30) приводу, який містить гребний гвинт, що приводиться в дію електродвигуном (31), причому електродвигун (31), керуючий блок (10), керування (20) двигуном, керування (50) акумулятором і акумулятор (60) розташовані в одному корпусі, а гребний гвинт розташований в проточному каналі в корпусі, при цьому керуючий блок (10), керування (20) двигуном і керування (50) акумулятором за допомогою керованого пристроєм (1) керування комунікаційного пристрою сполучені каналом передачі даних, який відрізняється тим, що керований комунікаційний пристрій містить системну шину (43) для обміну даними.
2. Плавзасіб за п. 1, який відрізняється тим, що у виконаному з можливістю роз'єднання високоамперному рознімі (40) передбачені контакти (41) передачі даних і контакти (42) передачі потужності.
3. Плавзасіб за п. 1 або п. 2, який відрізняється тим, що системна шина (43) виконана як двопровідна система з двоспрямованою роздільною передачею сигналу.
4. Плавзасіб за будь-яким з пп. 1-3, який відрізняється тим, що керований комунікаційний пристрій містить пристрій передачі RS-485.
5. Плавзасіб за будь-яким з пп. 1-4, який відрізняється тим, що керуючий блок (10) виконаний як задавач, а керування (20) двигуном і керування (50) акумулятором - як виконавчі модулі.
6. Плавзасіб за будь-яким з пп. 1-5, який відрізняється тим, що для обміну даними між пристроєм (1) керування і сервісним пристроєм передбачений безпровідний інтерфейс.
7. Плавзасіб за п. 6, який відрізняється тим, що безпровідний інтерфейс виконаний як двоспрямований інтерфейс (70) інфрачервоного випромінювання або як інший оптичний інтерфейс.
8. Плавзасіб за п. 6 або 7, який відрізняється тим, що для безпровідного інтерфейсу передбачений метод часового ущільнення із змінною часовою решіткою для передавача і приймача.
9. Плавзасіб за будь-яким з пп. 6-8, який відрізняється тим, що для керованого комунікаційного пристрою передбачене завантажуване програмне забезпечення для передачі даних по безпровідному інтерфейсу.
10. Плавзасіб за будь-яким з пп. 6-9, який відрізняється тим, що для передачі даних по безпровідному інтерфейсу передбачені дозволи на доступ.
11. Плавзасіб за будь-яким з пп. 1-10, який відрізняється тим, що для доступу до внутрішніх параметрів, результатів вимірювання, настройок і програмних можливостей передбачені дозволи на доступ.
12. Плавзасіб за будь-яким з пп. 1-11, який відрізняється тим, що керування (20) двигуном містить щонайменше один світловий датчик (21) і мінімум один водний датчик (23).
13. Плавзасіб за будь-яким з пп. 1-12, який відрізняється тим, що керування (50) акумулятором містить щонайменше один світловий датчик (52) і мінімум один водний датчик (53).
14. Плавзасіб за будь-яким з пп. 1-13, який відрізняється тим, що в пристрої (1) керування передбачені водонепроникні сховані органи керування.
15. Плавзасіб за будь-яким з пп. 1-14, який відрізняється тим, що в керуванні (60) акумулятором передбачений акустичний тривожний пристрій (54).
16. Плавзасіб за будь-яким з пп. 1-15, який відрізняється тим, що в пристрої (1) керування передбачений пристрій обліку часу, що впливає на блок (30) приводу.
17. Плавзасіб за будь-яким з пп. 1-16, який відрізняється тим, що в пристрої (1) керування передбачений щонайменше один датчик (17) напору води.
18. Плавзасіб за будь-яким з пп. 1-17, який відрізняється тим, що керуючий блок (10) містить щонайменше одну рукоятку (15, 16) з датчиком (18) рукоятки, при цьому датчик (18) рукоятки складається з рухомо змонтованого в підшипниках постійного магніту, який знаходиться в активному зв'язку з двома датчиками магнітного поля.
19. Плавзасіб за п. 18, який відрізняється тим, що для аналізу даних сигналів двох датчиків магнітного поля в датчику (18) рукоятки передбачене виявлення помилок шляхом формування сумарного сигналу з обох сигналів датчиків магнітного поля.
20. Спосіб експлуатації пристрою (1) керування моторного плавзасобу з вузлом (30) приводу, що містить гребний гвинт, який приводиться в дію електродвигуном (31), причому електродвигун (31), керуючий блок (10), керування (20) двигуном, керування (50) акумулятором і акумулятор (60) розташовані в одному корпусі, і при цьому гребний гвинт розташований в проточному каналі в корпусі, а між керуючим блоком (10), керуванням (20) двигуна і керуванням (50) акумулятора забезпечена передача даних за допомогою керованого комунікаційного пристрою, який відрізняється тим, що передачу даних і передачу потужності проводять за допомогою виконаного з можливістю роз'єднання високоамперного розніму (40).
21. Спосіб за п. 20, який відрізняється тим, що при перериванні або несправності керованого комунікаційного пристрою більш тривалих, ніж три секунди, керування (50) акумулятором повністю вимикає напругу в високоамперному рознімі (40).
22. Спосіб за п. 20 або 21, який відрізняється тим, що при зупиненому електродвигуні (31) керування (50) акумулятором подає у високоамперний рознім (40) максимум 16 вольт при обмеженні струму 500 мА.
23. Спосіб за будь-яким з пп. 20-22, який відрізняється тим, що в пристрої (1) керування зберігаються відомості діагностування про екстремальні значення щонайменше одного зі станів температури, електричного струму і напору води, а також щонайменше про одну з подій розкривання пристрою, проникнення води, збою приводу і похибки датчика.
24. Спосіб за будь-яким з пп. 20-23, який відрізняється тим, що при розпорядженні про необхідну зупинку по системній шині (43) керуючим блоком (10) посилається на керування (20) двигуном команда до зупинки електродвигуна (31), при цьому керуючий блок (10) запитує по системній шині (43) частоту обертання електродвигуна (31), причому при зафіксованій при цьому частоті обертання більше нуля вимикається потужнісний каскад (25) керування (20) двигуном, а при зафіксованій після цього частоті обертання більше нуля незалежним від системної шини (43) сигналом (26) аварійного відключення вимикається живильна напруга керування (20) двигуном.
25. Спосіб за будь-яким з пп. 20-24, який відрізняється тим, що для транспортування моторного плавзасобу при приєднаному зарядному пристрої через керуючий блок (10) подається сигнал на керування (50) акумулятором, після чого керування (50) акумулятором перевіряє ступінь зарядки акумулятора (60) і при стані зарядки більше ніж 10 % максимальної ємності сигналізує про похибку, а при стані зарядки менше ніж 10 % максимальної ємності запускає процес заряджання до 10 % максимальної ємності.
26. Спосіб за будь-яким з пп. 20-25, який відрізняється тим, що для транспортування моторного плавзасобу від керуючого блока (10) по системній шині (43) на керування (50) акумулятором передається команда до переходу в транспортний стан,
при цьому керування (50) акумулятором відключає робочу напругу з високоамперного розніму (40),
в керуванні (50) акумулятором відключаються від живлення всі компоненти, крім контролера (55) безпеки.
27. Спосіб за будь-яким з пп. 20-26, який відрізняється тим, що в транспортному стані контролер (55) безпеки контролює напругу і температуру акумулятора (60), а також світловий датчик (62).
28. Спосіб за будь-яким з пп. 20-27, який відрізняється тим, що в транспортному стані контролер (55) безпеки контролює напругу в зарядній муфті (51), і при з'єднанні із зарядним пристроєм перемикає керування (50) акумулятором в стан нормального режиму роботи.
Текст
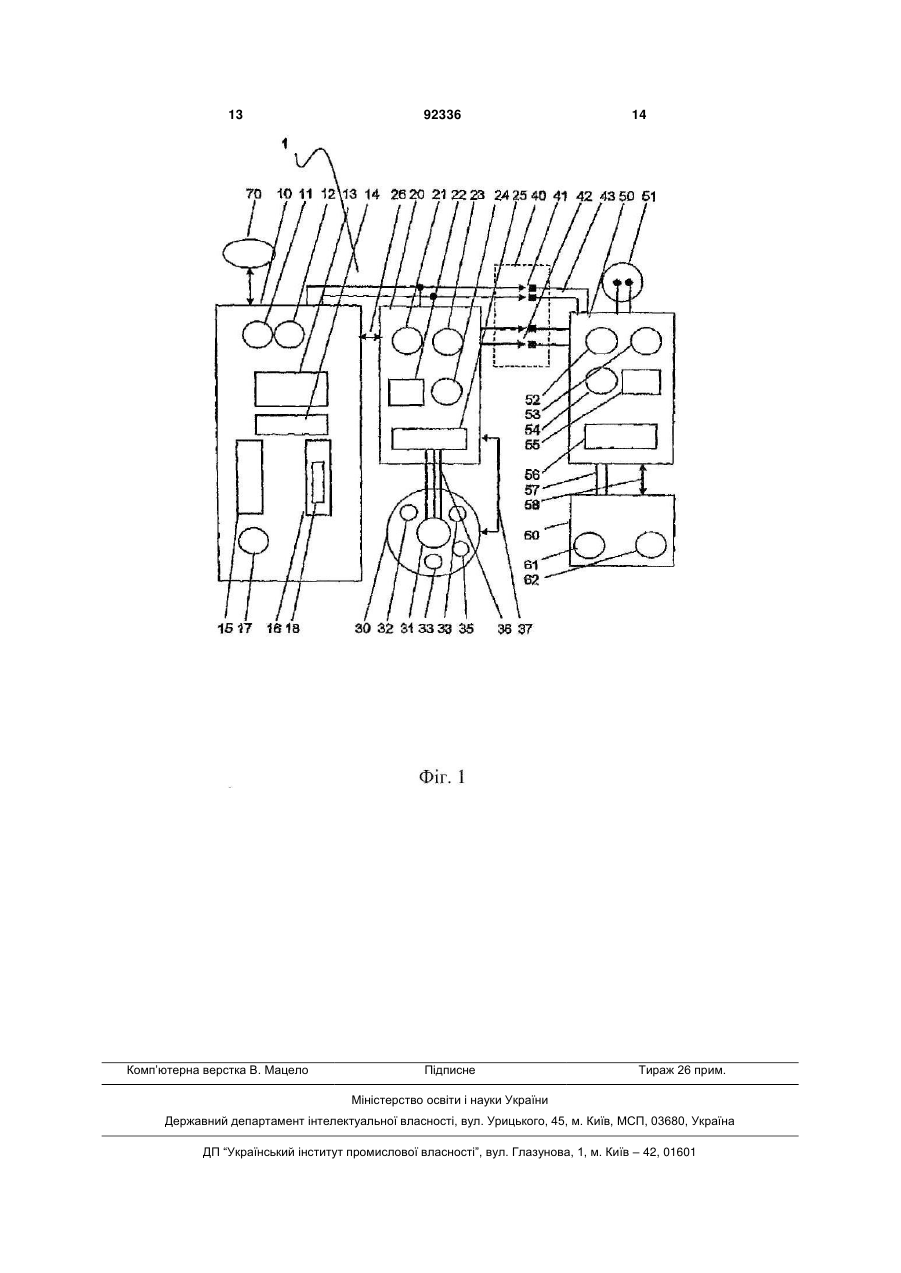
1. Моторний плавзасіб з пристроєм (1) керування і з вузлом (30) приводу, який містить гребний гвинт, що приводиться в дію електродвигуном (31), причому електродвигун (31), керуючий блок (10), керування (20) двигуном, керування (50) акумулятором і акумулятор (60) розташовані в одному корпусі, а гребний гвинт розташований в проточному каналі в корпусі, при цьому керуючий блок (10), керування (20) двигуном і керування (50) акумулятором за допомогою керованого пристроєм (1) керування комунікаційного пристрою сполучені каналом передачі даних, який відрізняється тим, що керований комунікаційний пристрій містить системну шину (43) для обміну даними. 2. Плавзасіб за п. 1, який відрізняється тим, що у виконаному з можливістю роз'єднання високоамперному рознімі (40) передбачені контакти (41) передачі даних і контакти (42) передачі потужності. 3. Плавзасіб за п. 1 або п. 2, який відрізняється тим, що системна шина (43) виконана як двопровідна система з двоспрямованою роздільною передачею сигналу. 4. Плавзасіб за будь-яким з пп. 1-3, який відрізняється тим, що керований комунікаційний пристрій містить пристрій передачі RS-485. 5. Плавзасіб за будь-яким з пп. 1-4, який відрізняється тим, що керуючий блок (10) виконаний як задавач, а керування (20) двигуном і керування (50) акумулятором - як виконавчі модулі. 6. Плавзасіб за будь-яким з пп. 1-5, який відрізняється тим, що для обміну даними між пристроєм (1) керування і сервісним пристроєм передбачений безпровідний інтерфейс. 2 (19) 1 3 92336 4 рукоятки, при цьому датчик (18) рукоятки складазупинку по системній шині (43) керуючим блоком ється з рухомо змонтованого в підшипниках пос(10) посилається на керування (20) двигуном котійного магніту, який знаходиться в активному манда до зупинки електродвигуна (31), при цьому зв'язку з двома датчиками магнітного поля. керуючий блок (10) запитує по системній шині (43) 19. Плавзасіб за п. 18, який відрізняється тим, що частоту обертання електродвигуна (31), причому для аналізу даних сигналів двох датчиків магнітнопри зафіксованій при цьому частоті обертання го поля в датчику (18) рукоятки передбачене виявбільше нуля вимикається потужнісний каскад (25) лення помилок шляхом формування сумарного керування (20) двигуном, а при зафіксованій після сигналу з обох сигналів датчиків магнітного поля. цього частоті обертання більше нуля незалежним 20. Спосіб експлуатації пристрою (1) керування від системної шини (43) сигналом (26) аварійного моторного плавзасобу з вузлом (30) приводу, що відключення вимикається живильна напруга керумістить гребний гвинт, який приводиться в дію вання (20) двигуном. 25. Спосіб за будь-яким з пп. 20-24, який відрізняелектродвигуном (31), причому електродвигун ється тим, що для транспортування моторного (31), керуючий блок (10), керування (20) двигуном, керування (50) акумулятором і акумулятор (60) плавзасобу при приєднаному зарядному пристрої розташовані в одному корпусі, і при цьому гребний через керуючий блок (10) подається сигнал на гвинт розташований в проточному каналі в корпусі, керування (50) акумулятором, після чого керувана між керуючим блоком (10), керуванням (20) двиня (50) акумулятором перевіряє ступінь зарядки гуна і керуванням (50) акумулятора забезпечена акумулятора (60) і при стані зарядки більше ніж 10 передача даних за допомогою керованого комуні% максимальної ємності сигналізує про похибку, а каційного пристрою, який відрізняється тим, що при стані зарядки менше ніж 10 % максимальної передачу даних і передачу потужності проводять ємності запускає процес заряджання до 10 % макза допомогою виконаного з можливістю роз'єднансимальної ємності. 26. Спосіб за будь-яким з пп. 20-25, який відрізняня високоамперного розніму (40). 21. Спосіб за п. 20, який відрізняється тим, що ється тим, що для транспортування моторного при перериванні або несправності керованого коплавзасобу від керуючого блока (10) по системній мунікаційного пристрою більш тривалих, ніж три шині (43) на керування (50) акумулятором передасекунди, керування (50) акумулятором повністю ється команда до переходу в транспортний стан, вимикає напругу в високоамперному рознімі (40). при цьому керування (50) акумулятором відключає 22. Спосіб за п. 20 або 21, який відрізняється робочу напругу з високоамперного розніму (40), тим, що при зупиненому електродвигуні (31) керув керуванні (50) акумулятором відключаються від вання (50) акумулятором подає у високоамперний живлення всі компоненти, крім контролера (55) рознім (40) максимум 16 вольт при обмеженні безпеки. 27. Спосіб за будь-яким з пп. 20-26, який відрізняструму 500 мА. 23. Спосіб за будь-яким з пп. 20-22, який відрізняється тим, що в транспортному стані контролер ється тим, що в пристрої (1) керування зберіга(55) безпеки контролює напругу і температуру ються відомості діагностування про екстремальні акумулятора (60), а також світловий датчик (62). 28. Спосіб за будь-яким з пп. 20-27, який відрізнязначення щонайменше одного зі станів темперається тим, що в транспортному стані контролер тури, електричного струму і напору води, а також щонайменше про одну з подій розкривання при(55) безпеки контролює напругу в зарядній муфті строю, проникнення води, збою приводу і похибки (51), і при з'єднанні із зарядним пристроєм передатчика. микає керування (50) акумулятором в стан норма24. Спосіб за будь-яким з пп. 20-23, який відрізняльного режиму роботи. ється тим, що при розпорядженні про необхідну Винахід стосується моторного плавзасобу з пристроєм керування і з вузлом приводу, який містить гребний гвинт, що приводиться в дію електродвигуном, причому електродвигун, керуючий блок, керування двигуном, керування акумулятором і акумулятор розташовані в одному корпусі і причому гребний гвинт розташований в проточному каналі в корпусі. Винахід далі стосується способу експлуатації пристрою керування моторним плавзасобом з вузлом приводу, який містить гребний гвинт, що приводиться в дію електродвигуном, причому електродвигун, керуючий блок, керування двигуном, керування акумулятором і акумулятор розташовані в одному корпусі і причому гребний гвинт розташований в проточному каналі в корпусі. Моторний плавзасіб згідно з винаходом - це плавзасіб, що приводиться в рух двигуном, який переміщує керуючу плавзасобом людину по або під водяною поверхнею. Плавзасіб служить для допомоги в пересуванні для плавця або нирця. Такий плавзасіб відомий також під назвою «мокрого підводного човна», оскільки плавець або нирець не сидить в кабіні або на транспортному засобі, а знаходиться безпосередньо в контакті з водою. З документа DE 90 06 333 відомий моторний плавзасіб, який має циліндричний головний корпус, в якому розташовані акумуляторні батареї і інші керуючі частини. У задній частині корпусу в кільцеподібному тілі розміщені як електродвигун, так і гребний гвинт. Цей плавзасіб може служити для переміщення плавця або нирця. Потік, що створюється електродвигуном і гребним гвинтом, попадає при цьому в людину, яка транспортується. Інший моторний плавзасіб відомий з документа WO 01/62347. При цьому користувач лежить на 5 92336 6 корпусі і гребний гвинт в проточному каналі привопроцесор з пам'яттю може вести контроль за потодиться в дію електродвигуном, що живиться акуком оброблюваних даних і фіксувати переривання. муляторними батареями, так що через проточний У випадку такої несправності може здійснюватися канал просмоктується водний потік, який прохоаварійне зупинення. дить протилежно напряму руху моторного плавзаЯкщо передбачений безпровідний інтерфейс собу. Водний потік відстороняється таким чином для обміну даними між пристроєм керування і привід користувача і за рахунок форми корпусу може строєм сервісу, то може реалізуватися захищений проводитися також мимо користувача. Це полегвід проникнення води канал передачі даних. шує плавання і занурювання з таким моторним Особливо вигідна конструктивна форма пеплавзасобом. При цьому гребний гвинт, електродредбачає, щоб безпровідний інтерфейс був виковигун і блок керування об'єднані в блок і розміщені наний як двоспрямований інтерфейс інфрачервов проточному каналі моторного плавзасобу. Це ного випромінювання або інший оптичний приводить до суттєвого спрощення в конструкції і інтерфейс. Багато портативних комп'ютерів облакеруванні моторним плавзасобом. Розміщені у днані таким інтерфейсом і таким чином можуть відділеному корпусі акумуляторні батареї можуть застосовуватися для технічного керування моторлегко зніматися для процесу заряджання і замінюним водним пристроєм без додаткового оснащенватися новим корпусом із зарядженими акумуляня. торними батареями. Якщо для безпровідного інтерфейсу передбаПри використанні, згідно з призначенням, мочений метод часового ущільнення із змінною часоторний плавзасіб схильний до впливу прісної або вою решіткою для передавача і приймача, то наясолоної води, температурних коливань і напору вна ширина смуги частот оптимально води. Якщо пристрій призначається для здачі на використовується для потоку оброблюваних дапрокат, то треба враховувати особливі запобіжні них. засоби і по-різному навчених користувачів. ЗокреПервинне завантаження програм в пристрій ма, треба в значній мірі уникати збоїв пристрою, обробки даних, в керуючий блок і/або керування які могли б зашкодити користувачеві. двигуном, і/або керування акумулятором, а також Задачею винаходу є створення моторного відновлення програм робиться можливим без доплавзасобу згаданого вище виду, який на основі даткових заходів, якщо для керованого комунікайого системної архітектури робить можливою осоційного пристрою передбачене завантажуване бливо надійну експлуатацію. програмне забезпечення для передачі даних чеДалі, задачею винаходу є створення способу рез безпровідний інтерфейс. особливо надійної експлуатації моторного плавзаЯкщо передбачені дозволи на доступ для песобу. редачі даних через безпровідний інтерфейс, то У частині пристрою поставлена задача виріможна досягати того, що програми захищені від шується за допомогою того, що керуючий блок, несанкціонованого доступу. керування двигуном і керування акумулятором за Конструктивна форма з можливостями для допомогою керованого комунікаційного пристрою навчених операторів підгонки експлуатаційних виконані з можливістю об'єднання даних. Таким параметрів і розширеними правами для персоналу чином можна забезпечити те, що передача даних сервісу передбачає, щоб для доступу до внутрішособливо надійна, і може проводитися постійний ніх параметрів, результатів вимірювання, настроконтроль системних компонентів і, при необхідносйок і програмування були передбачені дозволи на ті, проводитися аварійне зупинення. доступ. Якщо контакти передачі даних і контакти пеЗахищена від некомпетентного розкривання редачі потужності об'єднані в рознімному високоі/або проникаючої води конструкція передбачає, амперному штекерному рознімі, то може здійснющоб керування двигуном мало щонайменше один ватися надійне рознімне з'єднання між керуванням світловий датчик і мінімум один водний датчик. акумулятором і керуванням двигуном. Якщо керування акумулятором має щонаймеЯкщо керований комунікаційний пристрій міснше один світловий датчик і мінімум один водний тить системну шину для обміну даними, то систедатчик, то моторний плавзасіб надійно захищений мна архітектура є особливо наочною, оскільки у від електричного збою. всіх компонентах є в наявності ідентичні сигнали і Якщо на пристрої керування розташовані вопри змінах вони будуть одночасно ефективні у всіх донепроникні сховані органи керування, то можуть компонентах. здійснюватися особливі функції, такі як скидання Якщо системна шина виконана як двопровідна годин орендного терміну, без відкривання водонесистема з двоспрямованою роздільною передачею проникного корпусу пристрою. сигналу, то можна досягати надійної передачі даЯкщо в керуванні акумулятором передбачений них, не дивлячись на високі середньочастотні акустичний тривожний пристрій, то оператори моструми в керуванні двигуном і уніфікованому вузлі жуть оповіщатися про критичні робочі режими, такі приводу і електромагнітні перешкоди, що виклияк температурний перегрів компонентів або збій. каються ними. Конструкція призначеного для здачі в оренду Можуть використовуватися економічно доцімоторного плавзасобу особливо передбачає, щоб льні стандартні деталі, якщо керований комунікав пристрої керування був передбачений діючий на ційний пристрій містить пристрій передачі RS-485. уніфікований вузол приводу пристрій обліку часу. Якщо керуючий блок виконаний як задавач, а Максимальна глибина занурення може підгакерування двигуном і керування акумулятором - як нятися як під гранично допустиме навантаження виконавчий модуль, то можна досягати того, що водонепроникного корпусу моторного плавзасобу, 7 92336 8 так і під можливості користувача, якщо в пристрої пруга керування двигуном, то можна досягати токерування розташований щонайменше один датго, що необхідне зупинення електродвигуна може чик напору води. приводитися в дію декількома незалежними захоІнша конструктивна форма керуючого придами і збій дуже малоймовірний. строю моторного плавзасобу передбачає, щоб Особливо просто керована і задовольняюча керуючий блок мав щонайменше одну рукоятку з вимогам надійності конструктивна форма переддатчиком, який складається з рухомо змонтованобачає, щоб для транспортування моторного плавго в підшипниках постійного магніту, який знахозасобу при приєднаному зарядному пристрої чедиться в активному зв'язку з двома датчиками марез керуючий блок подавався сигнал на керування гнітного поля. акумулятором, після чого керування акумулятором Самоконтроль керуючого пристрою, і разом з перевіряє стан зарядки акумулятора і при ступені тим особливо безпечна при функціонуванні консзарядки більше ніж 10% максимальної ємності трукція, можуть досягатися при тому, що для анасигналізує про похибку, а при стані зарядки менше лізу даних сигналів двох датчиків магнітного поля ніж 10% максимальної ємності запускає процес в датчику передбачено розпізнавання помилок заряджання до 10% максимальної ємності. шляхом утворення сумарного сигналу з обох сигЯкщо для транспортування моторного плавзаналів датчиків магнітного поля. собу від керуючого блоку по системній шині на Задача, в частині способу, вирішується за докерування акумулятором передається команда до помогою того, що дані між керуючим блоком, керупереходу в транспортний стан і керування акумуванням двигуном і керуванням акумулятором пелятором розмикає робочу напругу високоампернореносяться за допомогою керованого го розніму, і в керуванні акумулятором відключакомунікаційного пристрою. Це робить можливим ються від електроживлення всі компоненти крім контроль компонентів і разом з тим особливо наконтролера безпеки, то можна досягати того, що дійну експлуатацію. можливе надійне транспортування і, проте, зберіПідвищення готовності до роботи можна досягається самоконтроль керування акумулятором. гати за рахунок взаємозамінних акумуляторів при Якщо контролер безпеки в транспортному одночасно надійному режимі роботи за рахунок стані веде контроль за напругою і за температуінтеграції акумулятора і інтелектуального керуванрою акумулятора, а також контролює світловий ня акумулятором, в той час як передача даних і датчик, то у випадку необхідності при недопустипередача потужності здійснюється через розніммому робочому режимі акумулятора, такому як ний високоамперний рознім. Таким чином, нарівні температурний перегрів або загрозливо глибоке з передачею потужності, в керування акумуляторозряджання, може відбуватися попередження, а ром можна переносити програми, а також обмінютакож протоколюватися неправомочне розкриванватися параметрами і даними між керуючим блоня керування акумулятором. ком і керуванням акумулятором. Якщо в транспортному стані контролер безпеБільш надійного режиму досягають, в той час ки веде контроль за зарядною муфтою і при з'єдяк при перериванні або несправності керованого нанні із зарядним пристроєм переводить керуванкомунікаційного пристрою більш тривалих, ніж три ня акумулятором в стан активного режиму, то секунди, керування акумулятором повністю вимимоторний плавзасіб може без додаткових пристрокає напругу у високоамперному рознімі. Таким їв перемикатися з транспортного стану в стан акчином уникають як загрози для операторів, так і тивного режиму. Вихід з транспортного стану відпошкодження деталей. бувається, якщо напруга зарядного пристрою Як електрична безпека зовні, так і захист дележить в межах допустимої області напруг. талей поліпшуються, якщо при зупиненому електВинахід пояснюється далі більш детально за родвигуні керування акумулятором забезпечує у допомогою представленого на кресленні прикладу високоамперному рознімі максимум 16 вольт при виконання, де показано: обмеженні струму 500 мА. Фіг.1 - схематичне представлення пристрою Налагодження, а також рішення у випадку викерування для моторного плавзасобу. мог про відшкодування збитку полегшуються, в той Фіг.1 показує пристрій керування 1 для моторчас як в пристрої керування акумулюються відоного плавзасобу з органом (панеллю) 10 керуванмості діагностування про екстремальні значення ня і кероване ним керування 20 двигуна, яке керує мінімум одного зі станів температури, електричновузлом 30 приводу з електродвигуном 31. Керуго струму і напору води, а також мінімум однієї з вання 20 двигуна і орган 10 керування зв'язані чеподій розкривання пристрою, води, що проникла, рез високоамперний рознім 40 з керуванням 50 збою приводу і похибки датчика. акумулятора, яке керує живленням пристрою 1 Якщо при здійсненні необхідного зупинення керування від акумулятора 60 і контролює його. від керуючого блоку по системній шині на керуванОрган 10 керування служить для введення хоня двигуном посилається команда до зупинення дових команд на призначений для надводного і електродвигуна, і якщо керуючий блок по системпідводного режиму роботи транспортний засіб, а ній шині запитує частоту обертання електродвигутакож для видачі оператору повідомлень про стан на і при цьому зафіксована частота обертання транспортного засобу.Далі, він служить для ввебільше нуля, то потужнісний каскад керування дення даних для програм і параметрів для придвигуном вимикається, і при зафіксованій після строю 1 керування. цього частоті обертання більше нуля за допомоКористувач лежить або стоїть на транспортгою сигналу необхідного відключення, незалежноному засобі і тримається за ліву рукоятку 15 і праго від системної шини, вимикається живильна наву рукоятку 16. Ходові команди даються через 9 92336 10 праву рукоятку 16, яка містить датчик 18 рукоятки. виконавцеві і одержує по кожному запиту підтверДатчик 18 рукоятки складається з двох горизонтадження, яке знов містить первинний запит. льних, послідовно розташованих в напрямі руху Внаслідок цього задавач може фіксувати, чи датчиків магнітного поля і розташованого поверх досягла команда виконавця і розумілася і чи оброних прямовисно змонтованого постійного магніту, блялася правильно. Якщо задавач твердо встаноякий підвішений на листовій пружині і один полюс влює похибку, то він може знов посилати команду якого знаходиться над переднім в напрямі руху або здійснювати запобіжні засоби, такі як необхіддатчиком магнітного поля. Для ходової команди не зупинення. права рукоятка 16 нахиляється до оператора. У органі 10 керування встановлений двоспряВнаслідок цього полюс постійного магніту пересумований інтерфейс 70 інфрачервоного випромівається від переднього датчика магнітного поля до нювання. Через нього можна зовні забезпечити заднього датчика магнітного поля. При максимадоступ до програм в органі 10 керування, керуванльному відхиленні він стоїть безпосередньо над ні 20 двигуном і керуванні 50 акумулятором і при заднім датчиком магнітного поля. При описаному необхідності занести в пам'ять нові програми. Дапереміщенні правої рукоятки 16 магнітне поле на лі, можуть зчитуватися параметри з цих блоків, а передньому датчику магнітного поля безперервно також і здійснюватися запис в них. У пристрої обзменшується, в той час як на задньому датчику робки даних з пам'яттю 14 для цього передбачене магнітного поля воно безперервно збільшується. завантажувальне програмне забезпечення. Там Обидва сигнали підводяться до пристрою обробки відбувається також аутентификація введення за даних з пам'яттю 14, який перевіряє їх на достовідопомогою PIN-коду. Різні рівні прав передбачені рність і виводить з цього ходові команди. Перевірдля користувачів, власників, сервісу і виробника, ка на несуперечність охоплює обчислення міри які деблокують і блокують доступ до можливостей для загального магнітного поля на обох датчиках і програмування і даних. Через захищений PINпорівняння з верхніми і нижніми граничними знакодом порт також може встановлюватися термін ченнями. Якщо загальне магнітне поле лежить прокату для орендного пристрою і максимальна поза граничними значеннями, то виводиться виглибина занурення. При цьому максимальна глисновок про помилку і дається розпорядження про бина занурення "користувача" з його PIN-кодом необхідне зупинення. Далі подія заноситься в паможе переустановлюватися, наскільки це допусм'ять пристрою обробки даних з пам'яттю 14. кають межі, встановлені "фабричним" PIN-кодом. Якщо оператор переміщує праву рукоятку 16 Після встановлення терміну прокату заданий час уперед, то енергопостачання вузла приводу 30 і може відлічуватися і таким чином показувати котим самим швидкість руху зменшується. Якщо ристувачеві термін, що залишається, на рідкокрисоператор відпускає праву рукоятку, то вона поверталічному дисплеї 13. Може бути передбачено, тається в передню позицію і енергопостачання щоб при заздалегідь заданому залишковому тервузла 30 приводу вимикається; це також відбуваміні користування потужність електроприводу скоється, якщо оператор ненавмисно покидає плаврочувалася, щоб додатково до індикації сигналізузасіб. вати користувачеві про запит до повернення, Для комунікації з оператором керуючий блок однак, давати йому можливість повернення із зме10 містить рідкокристалічний дисплей 13. Датчик ншеною тягою. 17 напору води служить для контролю глибини Команди керуючого блоку 10 в керування 20 занурення пристрою. Якщо перевищена встановдвигуном передаються далі через регулятор 22 на лювана максимальна величина, то вузол 30 припотужнісний каскад 25. За вихідним потужнісним воду може тимчасово вимикатися, так що пристрій каскадом 25 іде контроль з температурним датчиза рахунок власної підіймальної сили підіймається ком 24, і він захищений від перевантаження. Вихіна меншу глибину занурення. дний потужнісний каскад 25 зв'язаний з вузлом 30 Для особливих функцій, які не повинні бути приводу через передачу 36 потужності і передачу доступні оператору, орган керування має в наяв37 даних. ності два приховано розташованих датчики Холла Частота обертання електродвигуна 31 вимірю11 і 12. Вони можуть бути розташовані, наприклад, ється за допомогою датчиків Холла 32, 33 і 34, ліворуч і праворуч від рідкокристалічного дисплея передається далі по системній шині 43 і в керую13. Якщо вони активуються відповідними постійчому блоці 10 порівнюється із заданими значенними магнітами, то так можна, наприклад, скидати нями пристроєм обробки даних з пам'яттю 14. У години орендного терміну. випадку відхилення від заданих значень, якщо, Орган 10 керування сполучається з керуваннаприклад, всупереч команді по системній шині 43 ням 20 двигуна і керуванням 50 акумулятора через для скорочення частоти обертання електродвигусистемну шину 43. Через електричні перешкоди, на 31 до нуля, частота обертання електродвигуна що можливо з'являються за рахунок високих сере31 не повертається до нуля, все живлення керудньочастотних електричних струмів в керуванні 20 вання 20 двигуном може вимикатися по сигналу 26 двигуном, керування 20 двигуном і вузол 30 принеобхідного відключення, який діє незалежно від воду просторово розділені з керуючим блоком 10 і системної шини 43, і таким чином досягається системна шина 43 реалізована в двоспрямованій упевнене зупинення двигуна. роздільній техніці передачі сигналу як RS-485. На За температурою електродвигуна 31 іде потошині орган 10 керування працює як задавач, а кечний контроль за допомогою температурного датрування 20 двигуном і керування 50 акумулятором чика 35, так що у випадку перевантаження може - як виконавчий модуль. Задавач посилає команди відбуватися аварійне зупинення. 11 92336 12 Як захід для економії енергії потужнісний касі 52, які реєструють розкривання деталей і роблять кад 25 може при вимкненому приводі повністю можливим протоколювання в пристрої обробки вимикатися. даних з пам'яттю 14. При воді в акумуляторі також Акумулятор 60 і відповідне керування 50 акувноситься запис в пам'ять акумуляторного керумулятором можуть замінюватися, щоб досягати вання, оскільки акумулятор може також окремо постійної готовності пристрою. Їх приєднання до приводитися в дію керуючим блоком. системної шини проводиться через високоамперНекомпетентне розкривання пристрою може ний рознім 40, який нарівні з двома контактами 42 таким чином визначатися, що може полегшувати потужнісної передачі містить два контакти 41 пезнаходження причин у випадках пошкоджень. редачі даних. За рахунок реалізації системної шиКерування 50 акумулятором може зв'язуватини як шини послідовного обміну, є достатніми два ся через зарядну муфту 51 з не зображеним заряконтакти 41 для передачі даних, і може вибиратидним пристроєм. Якщо контролер 55 безпеки фікся особливо міцне рознімне з'єднання тільки з чосує відповідну зарядну напругу на контактах тирма контактами. Акумулятор 60 зв'язаний з кезарядної муфти 51, починається контрольований руванням 50 акумулятора за допомогою передачі від керування 56 зарядом процес заряджання аку57 потужності і передачі 58 даних. Через передачу мулятора 60. При цьому контролер 55 безпеки 58 даних контролер 55 безпеки веде контроль за веде контроль за температурою акумулятора 60 за напругою акумулятора і температурою за допомодопомогою температурних датчиків 61 і 62. Як гою температурних датчиків 61, 62. Контролер 55 акумулятор через його високу ємність знаходить безпеки як при небезпеці перегріву, так і при можзастосування переважно літієво-іонний акумуляливому глибокому розряджанні видає попереджутор. вальний сигнал через акустичний тривожний приДля повітряного транспортування високоамстрій 64. перний рознім 40 повинен бути знеструмлений і Контролер безпеки 55 веде контроль за висостан заряду акумулятора 60 може становити саме коамперним рознімом 40 на можливе коротке забільше 10% від максимальної ємності. Для підгомикання солоною водою або провідними предметовки користувач при приєднаному зарядному тами. При цьому напруга на потужнісних контактах пристрої може через керуючий блок 10 давати 42 може бути обмежена при зупиненому двигуні сигнал по системній шині 43 в контролер 55 безпебезпечним значенням 16В і далі обмежуватися ки. Якщо в цей момент міра завантаження недопумаксимальний електричний струм. На практиці для стимо висока, то видається попереджувальний обмеження струму виявилося відповідним значенсигнал і користувач повинен розряджати акумуляня 500 мА. Ходова напруга вмикається, як тільки тор аж до допустимої межі. Якщо стан заряду мекористувач приводить в дію датчик ручки. Потім нше 10%, то акумулятор 60 заряджається до 10% через керуючий блок проходить команда до вмийого максимальної ємності. Потім контролер 55 кання двигуна. безпеки відключає напругу живлення з потужнісКонтролер 55 безпеки веде контроль за висоних контактів 42 і інших навантажень. Залишаєтькоамперним рознімом 40 також на переривання ся активним лише контролер 55 безпеки, який конпередачі даних по системній шині 43, і при перетролює напругу і температуру в акумуляторі 60, а риванні більше ніж на три секунди вимикає напрутакож світловий датчик 52. Пристрій 1 керування гу на потужнісних контактах 42. готовий до транспортування. Керування 20 двигуном і керування 50 акумуПо закінченні транспортного стану зарядний лятором містять водні датчики 23 і 53, так що при пристрій знов приєднується. Якщо контролер 55 негерметичності блоків ця подія може занестися в безпеки фіксує допустиму зарядну напругу, він пам'ять про несправності в пристрої обробки дазнов активує компоненти пристрою керування 1 і них з пам'яттю 14, і привід може вимикатися. При починає заряджання акумулятора 60 до заданої наявності води в акумуляторі також вноситься заємності. пис в пам'яті акумуляторного керування, оскільки При такій системній архітектурі можна досягаакумулятор може також окремо приводитися в дію ти надійного режиму експлуатації також в критичкеруючим блоком. У випадку проникнення води них умовах експлуатації, таких як електромагнітні підводне плавання може відмінятися завчасно, перешкоди, негерметичність у високоамперному перш ніж моторний плавзасіб зазнає більшого порознімі 40 або в корпусі керування 20 двигуном, шкодження. Далі, керування 20 двигуном і керуабо у вузлі 30 приводу, і навіть при збої в системвання 50 акумулятором містять світлові датчики 21 ній шині 43. 13 Комп’ютерна верстка В. Мацело 92336 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMotorized watercraft with control device
Автори англійськоюBauer Ralf, Grimmelsen Juergen
Назва патенту російськоюМоторное плавсредство с устройством управления
Автори російськоюБауэр Ральф, Гриммельсен Юрген
МПК / Мітки
МПК: B63C 11/46, A63B 35/00
Мітки: керування, пристроєм, моторний, плавзасіб
Код посилання
<a href="https://ua.patents.su/7-92336-motornijj-plavzasib-z-pristroehm-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Моторний плавзасіб з пристроєм керування</a>
Пристрій для автоматичного керування електромережею і моторний привід для такого пристрою
Номер патенту: 75916
Опубліковано: 15.06.2006
Автори: Дональ Дітер, Фірекк Карстен, Ерміш Йохен
МПК: G05F 1/147, H01F 29/00, H02P 7/18, H02P 13/00
Мітки: привід, керування, пристрою, автоматичного, моторний, пристрій, електромережею, такого
Формула / Реферат:
1. Пристрій для автоматичного керування електромережею, який містить трансформатор зі ступеневим регулюванням напруги, регулювальна обмотка якого має відводи, і оснащений моторним приводом ступеневий перемикач, виконаний з можливістю безрозривного перемикання відводів регулювальної обмотки під навантаженням, розміщений на трансформаторі зі ступеневим регулюванням напруги вимірювальний перетворювач напруги для реєстрації дійсного значення...
Вузол керування комутаційним пристроєм
Номер патенту: 43630
Опубліковано: 25.08.2009
Автори: Кочергін Юрій Анатолійович, Ткаліч Олег Петрович, Муранов Олександр Сергійович
МПК: H04L 12/00, H04B 7/005
Мітки: пристроєм, вузол, керування, комутаційним
Формула / Реферат:
Вузол керування комутаційним пристроєм, що складений з послідовно з'єднаних блока вимірювання поточних значень параметрів потоку пакетів на увідних портах цього пристрою, блока формування команд управління змінами параметрів цих портів та блока виконавчих механізмів вузла керування комутаційним пристроєм, який відрізняється тим, що в нього уведений блок прогнозування значень параметрів потоків пакетів між блоком вимірювання та блоком...
Система керування двокоординатним пристроєм для виконання графічних робіт
Номер патенту: 25482
Опубліковано: 10.08.2007
Автори: Водяницький Станіслав Олегович, Джулгаков Віталій Георгійович, Руденко Кирило Ігорович, Власенко Оксана Іванівна
МПК: G05D 19/00
Мітки: система, графічних, керування, виконання, робіт, пристроєм, двокоординатним
Формула / Реферат:
Система керування двокоординатним пристроєм для виконання графічних робіт, що містить обчислювальний пристрій, блок оптронних ключів і послідовно сполучені блок підсилювачів крокового приводу, крокові двигуни і механізм переміщення, яка відрізняється тим, що в неї введені персональна електронно-обчислювальна машина, вихід якої, за допомогою інтерфейсу, сполучений з входом мікропроцесорного блока, що складається з двох мікроконтролерів,...
Плавзасіб
Номер патенту: 52424
Опубліковано: 16.12.2002
Автори: Бібічков Олександр Григорійович, Гоменюк Марина Олександрівна
МПК: B63B 35/00, B63B 35/32
Мітки: плавзасіб
Формула / Реферат:
Плавзасіб, що містить корпус з вантажними танками, кормову надбудову з машинним і насосним відділеннями, який відрізняється тим, що вантажні танки виконані у вигляді горизонтального циліндра з перегородками і з поперечним та поздовжним набором, зверненим до зовнішнього корпусу плавзасобу, який оснащений блендером, що встановлений в підпалубному просторі й об'єднаний трубопроводами усмоктування з танками, які трубопроводами сполучені з...
Система автоматичного керування пневматичним пристроєм навантаження
Номер патенту: 17799
Опубліковано: 16.10.2006
Автори: Пасічник Сергій Миколайович, Халаєва Олена Михайлівна, Пономаренко В'ячеслав Олегович
МПК: F16D 57/00
Мітки: автоматичного, пристроєм, система, пневматичним, керування, навантаження
Формула / Реферат:
Система автоматичного керування пневматичним пристроєм навантаження, що складається з герметичного корпусу, в якому встановлений ротор, в корпусі розміщені канали впускання і випускання, в яких закріплені патрубки, з'єднані з вентилем каналу впускання і вентилем каналу випускання, яка відрізняється тим, що в корпусі на підшипникових опорах встановлений ротор з жорстко закріпленою на ньому крильчаткою, на зовнішньому радіусі корпусу...
Попередній патент: Спосіб і пристрій для нанесення покриття у форми для розплавленого скла
Випадковий патент: Токарний різець