Комбінована сівалка

Формула / Реферат
1. Комбінована машина великої ширини, що включає ґрунтообробну машину (1) з рамою (7) і сівалку (1), що опирається на ґрунт за допомогою обладнаної колесами (6) бази (5) і призначена для зчеплення із трактором (3) за допомогою зчіпної системи (4), яка відрізняється тим, що база (5) з'єднана зі зчіпною системою (4) за допомогою першого з'єднувального пристрою (8), зазначеної рами (7) ґрунтообробної машини (1) і другого з'єднувального пристрою (11).
2. Комбінована машина за п. 1, яка відрізняється тим, що перший з'єднувальний пристрій (8) і другий з'єднувальний пристрій (11) виконані з можливістю піднімання ґрунтообробної машини (1) над ґрунтом.
3. Комбінована машина за будь-яким з пп. 1 або 2, яка відрізняється тим, що перший з'єднувальний пристрій (8) включає шарнірний чотириланковик з першим верхнім важелем (9) та з першим нижнім важелем (10), а другий з'єднувальний пристрій (11) включає шарнірний чотириланковик із другим верхнім важелем (19) та із другим нижнім важелем (20).
4. Комбінована машина за будь-яким з пп. 1-3, яка відрізняється тим, що перший (8) і другий (11) з'єднувальні пристрої включають, кожний, один верхній важіль (9, 19) і два нижніх важелі (10, 20).
5. Комбінована машина за будь-яким з пп. 1-4, яка відрізняється тим, що і перший (8), і другий (11) з'єднувальні пристрої виконані у вигляді деформівного шарнірного чотириланковика, зокрема, у вигляді паралелограма.
6. Комбінована машина за будь-яким з пп. 1-5, яка відрізняється тим, що включає гідравлічний модуль (21), виконаний з можливістю синхронного керування першим (8) і другим (11) з'єднувальними пристроями.
7. Комбінована машина за п. 6, яка відрізняється тим, що гідравлічний модуль (21) включає перший привід (22) з поршневою (34) і штоковою (35) порожнинами, який діє на перший з'єднувальний пристрій (8), і другий привід (23) з поршневою (32) і штоковою (33) порожнинами, який діє на другий з'єднувальний пристрій (11).
8. Комбінована машина за п. 7, яка відрізняється тим, що перший привід (22) з'єднаний з першим верхнім важелем (10) за допомогою першого шарніра і з рамою (7) за допомогою другого шарніра (25), а другий привід (23) з'єднаний із другим верхнім важелем (19) за допомогою третього шарніра (26) і з рамою (7) за допомогою четвертого шарніра (27).
9. Комбінована машина за п. 7, яка відрізняється тим, що поршнева порожнина (34) першого приводу (22) сполучається із штоковою порожниною (33) другого приводу (23).
10. Комбінована машина за будь-яким з пп. 7 або 9, яка відрізняється тим, що об'єм штокової порожнини (33) другого приводу (23) дорівнює об'єму поршневої порожнини (34) першого приводу (22).
Текст
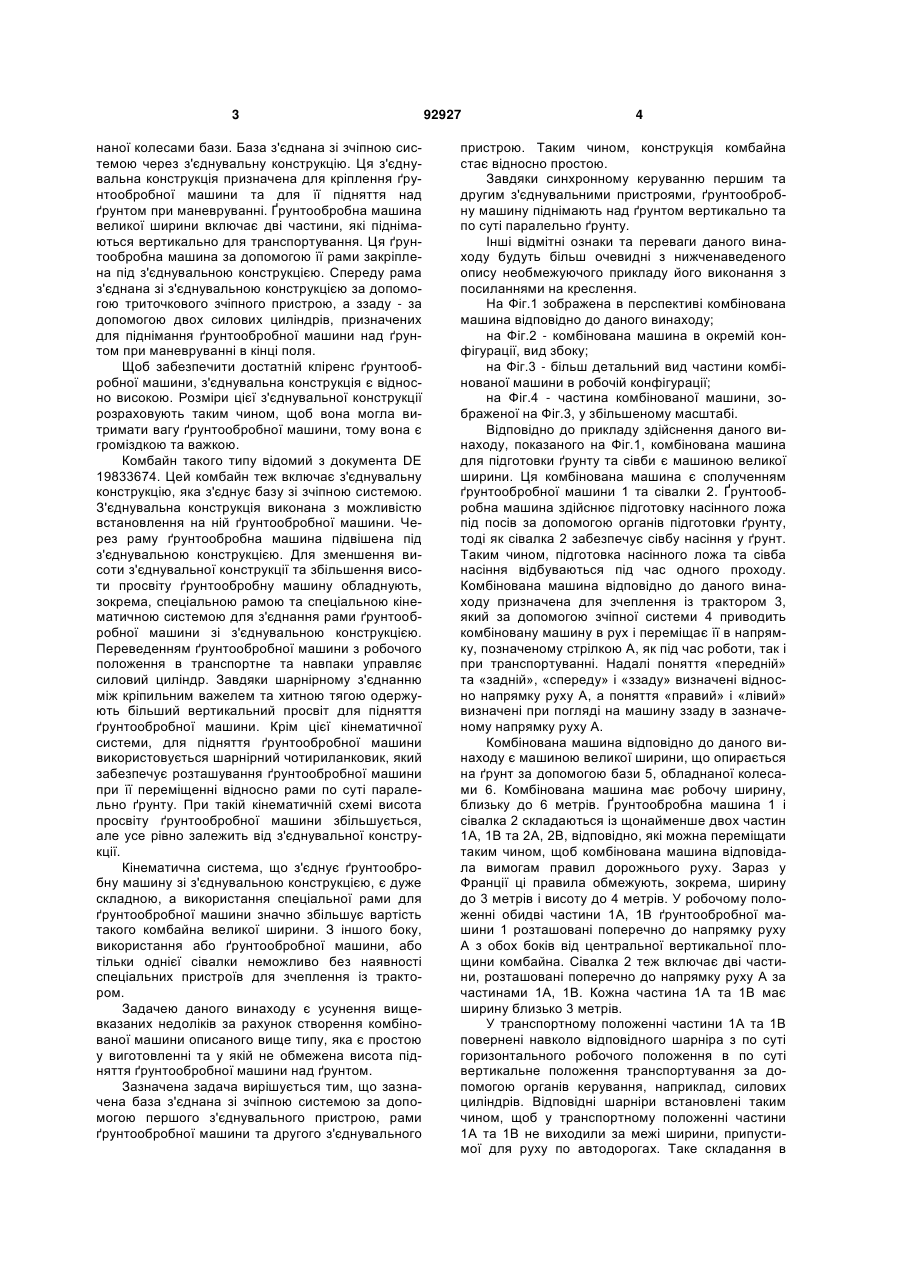
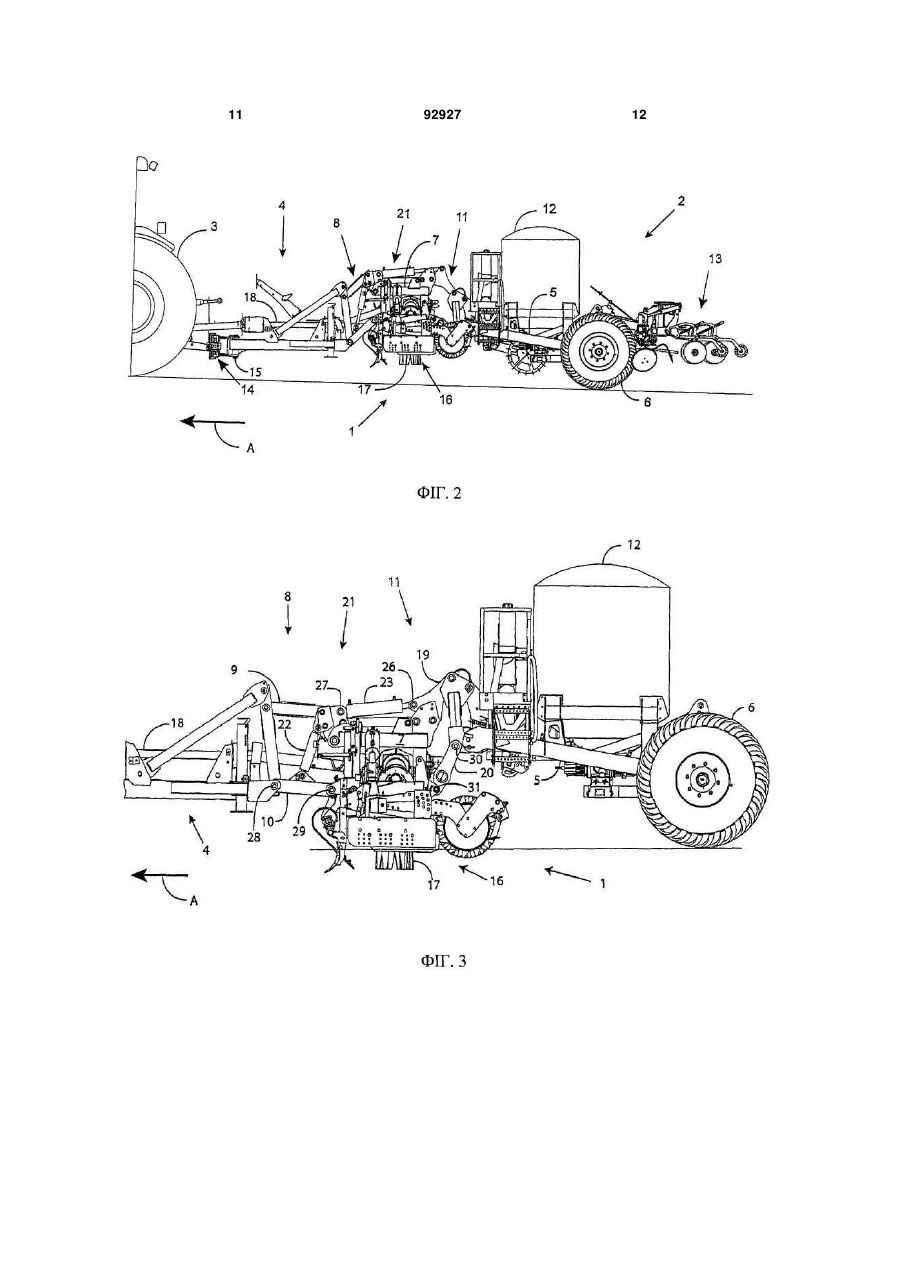
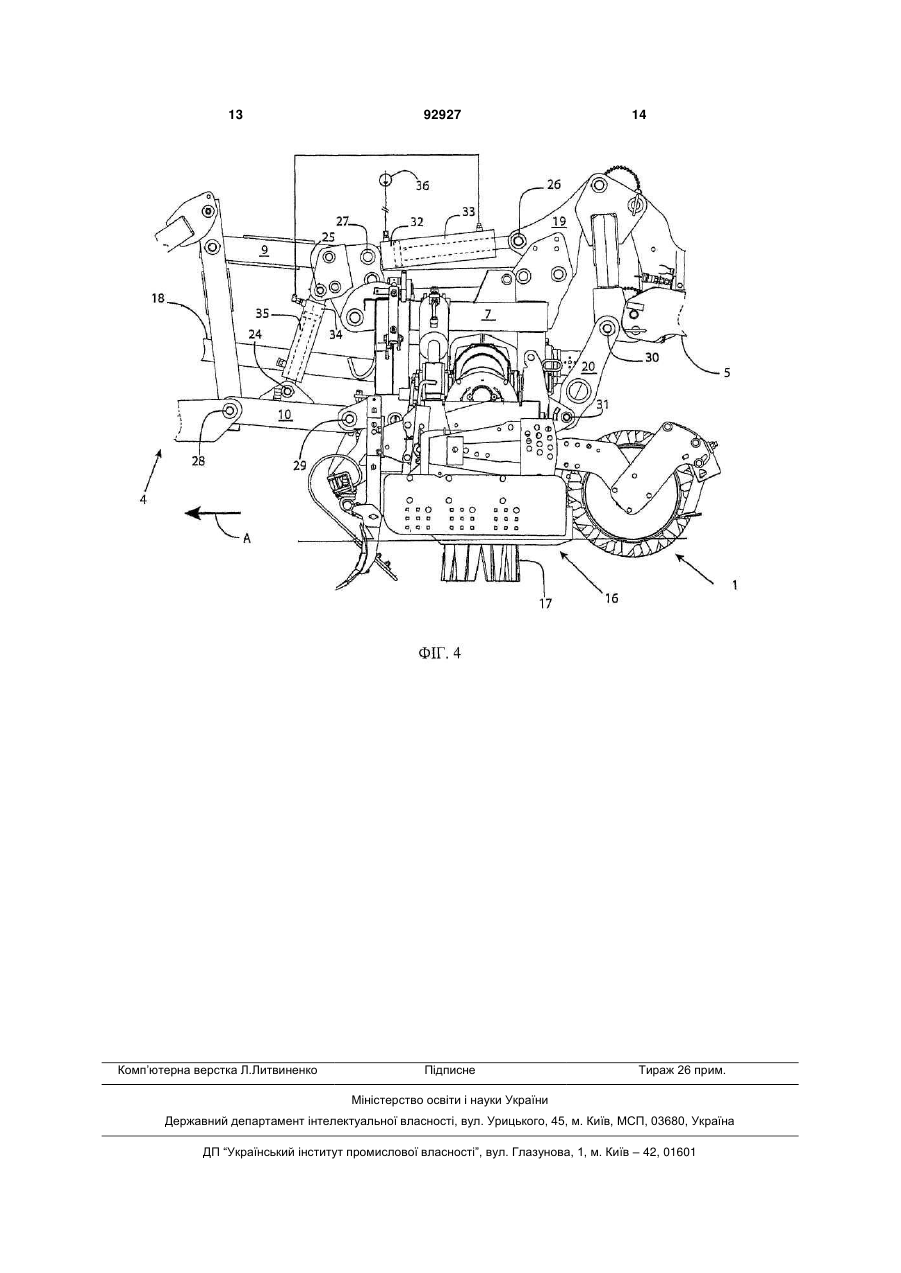
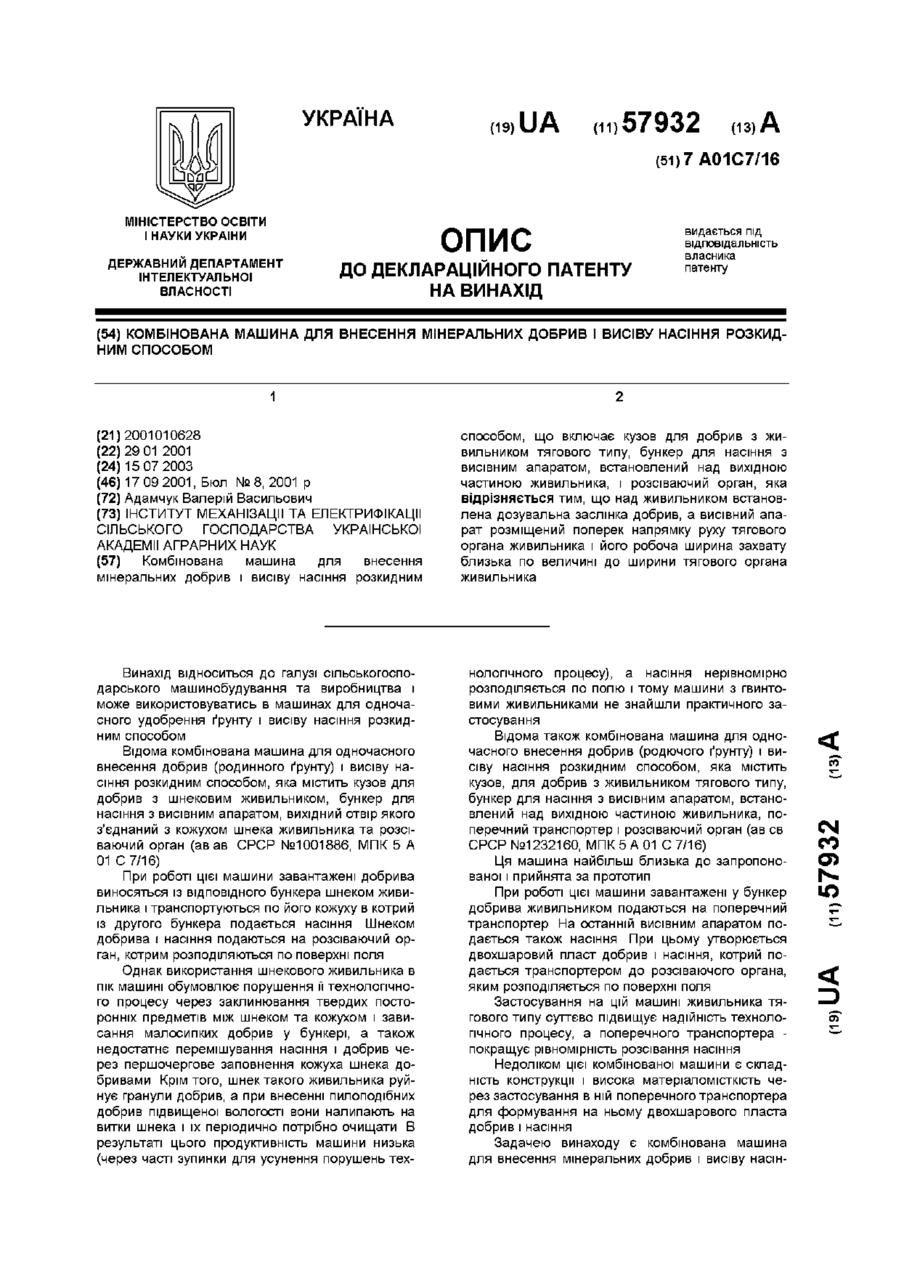
1. Комбінована машина великої ширини, що включає ґрунтообробну машину (1) з рамою (7) і сівалку (1), що опирається на ґрунт за допомогою обладнаної колесами (6) бази (5) і призначена для зчеплення із трактором (3) за допомогою зчіпної системи (4), яка відрізняється тим, що база (5) з'єднана зі зчіпною системою (4) за допомогою першого з'єднувального пристрою (8), зазначеної рами (7) ґрунтообробної машини (1) і другого з'єднувального пристрою (11). 2. Комбінована машина за п. 1, яка відрізняється тим, що перший з'єднувальний пристрій (8) і другий з'єднувальний пристрій (11) виконані з можливістю піднімання ґрунтообробної машини (1) над ґрунтом. 3. Комбінована машина за будь-яким з пп. 1 або 2, яка відрізняється тим, що перший з'єднувальний пристрій (8) включає шарнірний чотириланковик з першим верхнім важелем (9) та з першим нижнім важелем (10), а другий з'єднувальний пристрій (11) включає шарнірний чотириланковик із другим верхнім важелем (19) та із другим нижнім важелем (20). C2 2 UA 1 3 наної колесами бази. База з'єднана зі зчіпною системою через з'єднувальну конструкцію. Ця з'єднувальна конструкція призначена для кріплення ґрунтообробної машини та для її підняття над ґрунтом при маневруванні. Ґрунтообробна машина великої ширини включає дві частини, які піднімаються вертикально для транспортування. Ця ґрунтообробна машина за допомогою її рами закріплена під з'єднувальною конструкцією. Спереду рама з'єднана зі з'єднувальною конструкцією за допомогою триточкового зчіпного пристрою, а ззаду - за допомогою двох силових циліндрів, призначених для піднімання ґрунтообробної машини над ґрунтом при маневруванні в кінці поля. Щоб забезпечити достатній кліренс ґрунтообробної машини, з'єднувальна конструкція є відносно високою. Розміри цієї з'єднувальної конструкції розраховують таким чином, щоб вона могла витримати вагу ґрунтообробної машини, тому вона є громіздкою та важкою. Комбайн такого типу відомий з документа DE 19833674. Цей комбайн теж включає з'єднувальну конструкцію, яка з'єднує базу зі зчіпною системою. З'єднувальна конструкція виконана з можливістю встановлення на ній ґрунтообробної машини. Через раму ґрунтообробна машина підвішена під з'єднувальною конструкцією. Для зменшення висоти з'єднувальної конструкції та збільшення висоти просвіту ґрунтообробну машину обладнують, зокрема, спеціальною рамою та спеціальною кінематичною системою для з'єднання рами ґрунтообробної машини зі з'єднувальною конструкцією. Переведенням ґрунтообробної машини з робочого положення в транспортне та навпаки управляє силовий циліндр. Завдяки шарнірному з'єднанню між кріпильним важелем та хитною тягою одержують більший вертикальний просвіт для підняття ґрунтообробної машини. Крім цієї кінематичної системи, для підняття ґрунтообробної машини використовується шарнірний чотириланковик, який забезпечує розташування ґрунтообробної машини при її переміщенні відносно рами по суті паралельно ґрунту. При такій кінематичній схемі висота просвіту ґрунтообробної машини збільшується, але усе рівно залежить від з'єднувальної конструкції. Кінематична система, що з'єднує ґрунтообробну машину зі з'єднувальною конструкцією, є дуже складною, а використання спеціальної рами для ґрунтообробної машини значно збільшує вартість такого комбайна великої ширини. З іншого боку, використання або ґрунтообробної машини, або тільки однієї сівалки неможливо без наявності спеціальних пристроїв для зчеплення із трактором. Задачею даного винаходу є усунення вищевказаних недоліків за рахунок створення комбінованої машини описаного вище типу, яка є простою у виготовленні та у якій не обмежена висота підняття ґрунтообробної машини над ґрунтом. Зазначена задача вирішується тим, що зазначена база з'єднана зі зчіпною системою за допомогою першого з'єднувального пристрою, рами ґрунтообробної машини та другого з'єднувального 92927 4 пристрою. Таким чином, конструкція комбайна стає відносно простою. Завдяки синхронному керуванню першим та другим з'єднувальними пристроями, ґрунтообробну машину піднімають над ґрунтом вертикально та по суті паралельно ґрунту. Інші відмітні ознаки та переваги даного винаходу будуть більш очевидні з нижченаведеного опису необмежуючого прикладу його виконання з посиланнями на креслення. На Фіг.1 зображена в перспективі комбінована машина відповідно до даного винаходу; на Фіг.2 - комбінована машина в окремій конфігурації, вид збоку; на Фіг.3 - більш детальний вид частини комбінованої машини в робочій конфігурації; на Фіг.4 - частина комбінованої машини, зображеної на Фіг.3, у збільшеному масштабі. Відповідно до прикладу здійснення даного винаходу, показаного на Фіг.1, комбінована машина для підготовки ґрунту та сівби є машиною великої ширини. Ця комбінована машина є сполученням ґрунтообробної машини 1 та сівалки 2. Ґрунтообробна машина здійснює підготовку насінного ложа під посів за допомогою органів підготовки ґрунту, тоді як сівалка 2 забезпечує сівбу насіння у ґрунт. Таким чином, підготовка насінного ложа та сівба насіння відбуваються під час одного проходу. Комбінована машина відповідно до даного винаходу призначена для зчеплення із трактором 3, який за допомогою зчіпної системи 4 приводить комбіновану машину в рух і переміщає її в напрямку, позначеному стрілкою А, як під час роботи, так і при транспортуванні. Надалі поняття «передній» та «задній», «спереду» і «ззаду» визначені відносно напрямку руху А, а поняття «правий» і «лівий» визначені при погляді на машину ззаду в зазначеному напрямку руху А. Комбінована машина відповідно до даного винаходу є машиною великої ширини, що опирається на ґрунт за допомогою бази 5, обладнаної колесами 6. Комбінована машина має робочу ширину, близьку до 6 метрів. Ґрунтообробна машина 1 і сівалка 2 складаються із щонайменше двох частин 1А, 1В та 2А, 2В, відповідно, які можна переміщати таким чином, щоб комбінована машина відповідала вимогам правил дорожнього руху. Зараз у Франції ці правила обмежують, зокрема, ширину до 3 метрів і висоту до 4 метрів. У робочому положенні обидві частини 1А, 1В ґрунтообробної машини 1 розташовані поперечно до напрямку руху А з обох боків від центральної вертикальної площини комбайна. Сівалка 2 теж включає дві частини, розташовані поперечно до напрямку руху А за частинами 1А, 1В. Кожна частина 1А та 1В має ширину близько 3 метрів. У транспортному положенні частини 1А та 1В повернені навколо відповідного шарніра з по суті горизонтального робочого положення в по суті вертикальне положення транспортування за допомогою органів керування, наприклад, силових циліндрів. Відповідні шарніри встановлені таким чином, щоб у транспортному положенні частини 1А та 1В не виходили за межі ширини, припустимої для руху по автодорогах. Таке складання в 5 транспортне положення відомо фахівцям, тому його опис опущений. На Фіг.1 частини сівалки 2 не показані. Ґрунтообробна машина 1 розташована поперечно до напрямку руху А спереду від сівалки 2 і включає раму 7, на якій установлені обидві частини 1А та 1В ґрунтообробної машини 1. Рама 7 з'єднана зі зчіпною системою 4 за допомогою першого з'єднувального пристрою 8. Якщо дивитися збоку, перший з'єднувальний пристрій 8 включає шарнірний чотириланковик, що деформується у вертикальному напрямку. Деформівний чотириланковик є шарнірним паралелограмом. Перший з'єднувальний пристрій 8 складається з першого верхнього важеля 9 та першого нижнього важеля 10. Зазначені перші важелі 9 і 10 з'єднані з одного боку з рамою 7, а з іншого боку - зі зчіпною системою 4 за допомогою шарнірів з осями, по суті перпендикулярними до напрямку руху А. Краще, рама 7 ґрунтообробної машини 1 обладнана триточковим зчіпним пристроєм, який включає верхню точку та дві нижні точки. Таким чином, перший з'єднувальний пристрій 8 включає перший верхній важіль 9 і два перших нижніх важелі 10. Рама 7 ґрунтообробної машини 1 з'єднана також з базою 5 за допомогою другого з'єднувального пристрою 11. Таким чином, база 5 з'єднана зі зчіпною системою 4 за допомогою першого з'єднувального пристрою 8, рами 7 ґрунтообробної машини 1 і другого з'єднувального пристрою 11. На базі 5 установлений насінний ящик 12, в основі якого розташований дозуючий пристрій (не показаний), який дозволяє дозувати насіння, що надходить з нього. У задній частині бази 5 встановлений висівний апарат 13 для сівби насіння у ґрунт і пристрій нагнітання повітря (не показаний) для створення повітряного потоку, що переносить насіння від насінного ящика 12 до висівного апарата 13. Таким чином, сівалка 2 складається з бази 5 з насінним ящиком 12 і висівним апаратом 13. Відповідно до наведеного прикладу виконання, сівалка 2 є сівалкою пневматичного типу. Трубки подачі насіння із насінного ящика 12 у висівний апарат 13, а також дозуюча головка на фігурах не показані. У прикладі виконання, показаному на Фіг.2, зчіпна система 4 з'єднана із двома нижніми точками 14 зчеплення триточкового зчіпного пристрою трактора 3. У цьому випадку зчіпна система 4 включає шарнір 15 з по суті вертикальною віссю, що дозволяє обмежити площу розвороту комбінованої машини в кінці поля. Завдяки цьому вертикальному шарніру 15 обмежуються маневри, необхідні для приведення комбінованої машини на одну лінію із трактором 3 в кінці поля. В іншому, не показаному прикладі виконання, комбіновану машину з'єднують безпосередньо з рим-болтом трактора 3. При кріпленні за допомогою рим-болта відсутня необхідність у наявності вертикального шарніра 15 на зчіпній системі. На Фіг.2 показана комбінована машина в конфігурації маневрування. У цій конфігурації ґрунтообробна машина 1, а також висівний апарат 13 підняті над ґрунтом. Ця конфігурація забезпечує маневрування в кінці поля за рахунок простого 92927 6 підняття ґрунтообробної машини 1 та сівалки 2 або, зокрема, висівного апарата 13, над ґрунтом. Ця конфігурація маневрування дозволяє уникнути складання частин 1А та 1В в вертикальне положення транспортування. Ґрунтообробну машину 1 з урахуванням її конструкції необхідно піднімати по суті вертикально по відношенню до ґрунту. У розглянутому прикладі виконання ґрунтообробна машина 1 є ротаційною бороною 16, що включає інструменти 17, які приводяться в рух за рахунок відбору потужності від трактора 3. Як відомо фахівцям, ці інструменти 17 установлені в корпусі ротаційної борони 16 з можливістю обертання. Надавання руху інструментам 17 навколо відповідної вертикальної осі здійснюється за допомогою пристрою відбору потужності від трактора, який через телескопічний вал з універсальними шарнірами 18 пускає в хід вхідний вал центральної роздавальної коробки передач. Центральна роздавальна коробка передач, встановлена на корпусі, передає рух обертання на ротори. Щоб не ушкодити телескопічний вал з універсальними шарнірами 18, необхідно, щоб вхідний вал центральної роздавальної коробки передач залишався паралельним пристрою відбору потужності від трактора 3. Важливою особливістю даного винаходу є також те, що і другий з'єднувальний пристрій 11, який з'єднує раму 7 із сівалкою 2, включає, якщо дивитися збоку, вертикально деформівний шарнірний чотириланковик. Це другий з'єднувальний пристрій 11 включає другий верхній важіль 19 і другий нижній важіль 20. Зазначені другі важелі 19 і 20 з'єднані, з одного боку, з рамою 7, а з іншого боку - з базою 5 за допомогою шарнірів з відповідними осями, по суті перпендикулярними до напрямку руху А. У представленому прикладі виконання деформівний шарнірний чотириланковик, краще, є паралелограмом. Краще, другий з'єднувальний пристрій 11 включає один другий верхній важіль 19 і два других нижніх важелі 20. Для підняття ґрунтообробної машини 1 з метою маневрування або для її опускання в робоче положення комбінована машина обладнана гідравлічним модулем 21. Цей гідравлічний модуль 21 дозволяє опускати ротаційну борону 16 у робоче положення або піднімати її в положення маневрування. Гідравлічний модуль 21 деформує паралелограми першого з'єднувального пристрою 8 і другого з'єднувального пристрою 11 таким чином, що відбувається по суті вертикальний підйом ротаційної борони 16 паралельно поверхні ґрунту. У прикладі виконання, показаному на Фіг.3, комбінована машина показана в робочій конфігурації. При цьому інструменти 17 ротаційної борони 16 перебувають у ґрунті. Для переходу з конфігурації маневрування (Фіг.2) в робочу конфігурацію (Фіг.3) у гідравлічному модулі 21 є перший привід 22, призначений для дії на перший з'єднувальний пристрій 8, і другий привід 23, призначений для дії на другий з'єднувальний пристрій 11. У робочій конфігурації (Фіг.3) обидва приводи 22, 23 перебувають у засунутому положенні, тоді як у конфігурації маневрування (Фіг.2) обидва приводи 22, 23 перебувають у висунутому положенні. Висівний 7 апарат 13 на Фіг.3 і 4 не показаний. Підняття по висоті ґрунтообробної машини 1 не обмежено яким-небудь елементом комбайна. Разом з тим, воно залежить від ходу приводів 22 і 23 та від довжини важелів 9, 10, 19 і 20 першого та другого з'єднувальних пристроїв 8 і 11. Як показано на Фіг.3 і 4, перший привід 22, з одного боку, з'єднаний з першим нижнім важелем 10 за допомогою першого шарніра 24 з горизонтальною віссю, перпендикулярною до напрямку руху А, а з іншого боку - з рамою 7 за допомогою другого шарніра 25 з горизонтальною віссю, перпендикулярною до напрямку руху А. Другий привід 23 з одного боку з'єднаний із другим верхнім важелем 19 за допомогою третього шарніра 26 з горизонтальною віссю, перпендикулярною до напрямку руху А, а з іншого боку - з рамою 7 за допомогою четвертого шарніра 27 з горизонтальною віссю, перпендикулярною до напрямку руху А. Перший нижній важіль 10 з одного боку з'єднаний зі зчіпною системою 4 за допомогою п'ятого шарніра 28, а з іншого боку - з рамою 7 за допомогою шостого шарніра 29. Другий нижній важіль 20 з одного боку з'єднаний з базою 5 за допомогою сьомого шарніра 30, а з іншого боку - з рамою 7 за допомогою восьмого шарніра 31. У розглянутому прикладі виконання перший привід 22 включає щонайменше один гідравлічний силовий циліндр простої дії, а другий привід 23 гідравлічний силовий циліндр подвійної дії. Для здійснення по суті вертикального переміщення ротаційної борони 16 перший з'єднувальний пристрій 8 і другий з'єднувальний пристрій 11 синхронізовані через гідравлічний модуль 21. Гідравлічний модуль 21 сполучається з гідравлічною магістраллю трактора 3. Гідравлічний модуль 21 управляється безпосередньо із трактора 3 за допомогою пристрою керування. Комбайнерові не потрібно піднімати нижні точки 14 зчеплення триточкового зчіпного пристрою трактора 3. Як показано на Фіг.4, поршнева порожнина 32 другого приводу 23 живиться від резервуара 36 гідравлічної магістралі для підняття ротаційної борони 16 над ґрунтом. Штокова порожнина 33 другого приводу 23 сполучається з поршневою порожниною 34 першого приводу 22. Таким чином, коли відбувається заповнення поршневої порожнини 32 другого приводу 23, рідина, що міститься в штоковій порожнині 33, виштовхується в поршневу порожнину 34 першого приводу 22. Другий привід 23, краще, є силовим циліндром подвійної дії, але він використовується як силовий циліндр простої дії. Коли обидва приводи 22, 23 працюють на максимальне подовження, ротаційна борона 16 піднімається над ґрунтом (Фіг.2). При цьому ротаційна борона 16 піднімається гідравлічним модулем 21 паралельно ґрунту без небезпеки ушкодження телескопічного вала з універсальними шарнірами 18. У конфігурації маневрування обидва приводи 22, 23 перебувають у повністю висунутому положенні. Для опускання ротаційної борони 16 в робоче положення рідина, що міститься в поршневій порожнині 34 першого приводу 22, виштовхується в штокову порожнину 33 другого приводу 23 під дією 92927 8 ваги ротаційної борони 16, і рідина з поршневої порожнини 32 другого приводу 23 повертається в резервуар 36. Важливо, щоб об'єм штокової порожнини 33 другого приводу 23 дорівнював об'єму поршневої порожнини 34 першого приводу 22. Таким чином, під час керування другим приводом 23 ротаційна борона 16 піднімається по суті паралельно ґрунту. Шостий шарнір 29 і восьмий шарнір 31 забезпечують вертикальне переміщення угору на однаковій висоті. У представленому прикладі виконання перший привід 22 складається із двох силових циліндрів простої дії. Розміри цих циліндрів визначають таким чином, щоб об'єм штокової порожнини 33 другого приводу 23 дорівнював об'єму двох поршневих порожнин 34. Відповідно до прикладу виконання, не показаному на кресленнях, на отвір у штоковій порожнині 35 першого приводу 22 може бути встановлений гідропневматичний акумулятор, який дозволяє піднімати ротаційну борону 16 під час роботи, що називають «робити розвантаження». Іншою перевагою даного винаходу є зменшення габариту по довжині комбінованої машини в конфігурації маневрування та при транспортуванні. У конфігурації маневрування перший та другий приводи 22 і 23 видовжуються для піднімання ґрунтообробної машини 1 над ґрунтом. Слід відзначити, що в цьому випадку база 5 перебуває ближче до зчіпної системи 4. Відстань між вертикальною площиною, що проходить через перший шарнір 24, і вертикальною площиною, що проходить через другий шарнір 26, є меншою, ніж ця ж відстань у робочій конфігурації (Фіг.3) комбінованої машини. Зменшення габариту по довжині поліпшує маневреність комбінованої машини при транспортуванні та маневруванні. Для обмеження ширини смуги розвороту можна включати в роботу ґрунтообробну машину 1 і сівалку 2 в різні моменти часу. На практиці, коли комбайнер прибуває на свою ділянку, він спочатку здійснює опускання двох частин ґрунтообробної машини 1 в по суті горизонтальне положення, перпендикулярне напрямку руху А. Потім він включає телескопічний вал з універсальними шарнірами 18 через відбір потужності від трактора 3, і інструменти 17 ротаційної борони 16 приводяться в обертання. Після цього комбайнер включає гідравлічний модуль 21, і другий привід 23 починає рух для приведення ротаційної борони 16 в робоче положення. Коли сівалка 2, точніше, її висівний апарат 13, доходить до рівня зони, обробленої ротаційною бороною 16, комбайнер опускає висівний апарат 13 у ґрунт. Таким чином, комбайн здійснює сівбу одночасно з підготовкою насінного ложа. В кінці поля комбайнер спочатку включає гідравлічний модуль 21 для піднімання ротаційної борони 13 над ґрунтом, після чого здійснює підняття висівного апарата 13. Опускання в ґрунт і підняття над ґрунтом відбуваються поступово, що обмежує ширину розворотної смуги. Комбайнерові немає необхідності впливати на підняття нижніх зчіпних точок 14 триточкового зчіпного пристрою трактора 3 під час використання комбайна. 9 У показаному на фігурах прикладі виконання, крім ротаційної борони 16, ґрунтообробна машина 1 обладнана спереду вирівнювальним лезом і розпушувачами слідів, а ззаду - обмежувальним котком. Ці агрегати розташовані по суті під рамою та поперечно по відношенню до напрямку руху А. Обмежувальний коток визначає глибину роботи інструментів 17 ротаційної борони 16. При використанні комбінованої машини відповідно до даного винаходу підготовка насінного ложа та сівба насіння у ґрунт відбуваються одночасно під час одного проходу на ділянці. Продуктивність робіт підвищується, тому що скорочується число послідовних проходів на ділянці для здійснення різних операцій. Це приводить до виграшу в часі, економії палива та зменшення зайвого небажаного ущільнення ґрунту колесами трактора. Восени на вологих полях умови для використання такого комбайна не завжди сприятливі. Завдяки наявності перших і другого з'єднувальних пристроїв 8 і 11, комбайнер може адаптувати комбайн залежно від потреб. Він може використовувати ґрунтообробну машину 1 окремо від сівалки 2. Для цього він повинен від'єднати другий з'єднувальний пристрій 11, потім перший з'єднувальний пристрій 92927 10 8 і з'єднати ґрунтообробну машину 1 прямо із триточковим зчіпним пристроєм трактора 3. Таким чином, під час першого проходу він здійснює підготовку насінного ложа, а операцію сівби здійснює під час другого проходу, коли земля підсохне. У цьому випадку сівбу можна робити на великій швидкості. Для сівби комбайнер приєднує зчіпну систему 4 за допомогою першого з'єднувального пристрою 8 до сівалки 2. Сівалка 2 відповідно до даного винаходу може включати висівний апарат 13 із трьох частин. У цьому випадку висівний апарат 13 включає центральну частину та бічну частину з кожного боку від центральної частини. Для транспортування складають угору тільки бічні частини. Така сівалка із трьох частин відома фахівцям і її опис опускається. Зрозуміло, даний винахід не обмежується описаними вище та представленими на кресленнях варіантами його здійснення. У винахід можна вносити зміни, зокрема, у конструкцію або кількість різних елементів, або їх заміни технічними еквівалентами, не виходячи при цьому за рамки об'єму правової охорони. 11 92927 12 13 Комп’ютерна верстка Л.Литвиненко 92927 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCombined seed drill
Автори англійськоюKirch Michel
Назва патенту російськоюКомбинированная сеялка
Автори російськоюКирш Мишель
МПК / Мітки
МПК: A01B 49/06
Мітки: комбінована, сівалка
Код посилання
<a href="https://ua.patents.su/7-92927-kombinovana-sivalka.html" target="_blank" rel="follow" title="База патентів України">Комбінована сівалка</a>
Комбінована ґрунтообробна машина

Номер патенту: 50794
Опубліковано: 25.06.2010
Автори: Бончик Віталій Семенович, Нісмейко Сергій Сергійович, Стрельчук Олександр Якович, Арсенюк Олександр Вікторович
МПК: A01B 49/00
Мітки: комбінована, ґрунтообробна, машина
Формула / Реферат:
1. Комбінована ґрунтообробна машина, що містить раму, на якій розміщені опорні колеса, плоскорізальні лапи, вертикальні ротори, карданна передача, конічний редуктор, яка відрізняється тим, що плоскорізальні лапи розміщені спереду по осьовій лінії між двома вертикальними роторами, причому ширина захвату двох вертикальних роторів і плоскорізальної лапи співпадають.2. Комбінована ґрунтообробна машина за п. 1, яка відрізняється тим,...
Комбінована грунтообробна посівна машина

Номер патенту: 25070
Опубліковано: 25.07.2007
Автори: Білоткач Михайло Петрович, Васківнюк Юрій Миколайович, Зирянов Володимир Олексійович, Романенко Михайло Пилипович, Лящук Микола Федорович
МПК: A01C 7/20, A01B 49/06
Мітки: посівна, комбінована, грунтообробна, машина
Формула / Реферат:
Комбінована ґрунтообробна посівна машина, що містить раму, причіпний пристрій, опорно-привідні колеса, ґрунтообробні посівні робочі органи з гряділями, бункер, елеватор і розподільник висівного матеріалу та проводи туконасіння, яка відрізняється тим, що додатково має зачіпний пристрій у вигляді трикутника, який постійно закріплений на рамі, а причіпний пристрій є знімним і виконаний у вигляді трибрусової сниці та з'єднаний з рамою пальцями з...
Комбінована машина для внесення мінеральних добрив і висіву насіння розкидним способом
Номер патенту: 57932
Опубліковано: 15.06.2004
Автор: Адамчук Валерій Васильович
МПК: A01C 7/08
Мітки: комбінована, способом, добрив, внесення, розкидним, висіву, насіння, машина, мінеральних
Формула / Реферат:
Комбінована машина для внесення мінеральних добрив і висіву насіння розкидним способом, що включає кузов для добрив з живильником тягового типу, бункер для насіння з висівним апаратом, встановлений над вихідною частиною живильника, і розсіваючий орган, яка відрізняється тим, що над живильником встановлена дозувальна заслінка добрив, а висівний апарат розміщений поперек напрямку руху тягового органа живильника, при цьому робоча ширина захвату...
Комбінована броньова перешкода
Номер патенту: 36597
Опубліковано: 27.10.2008
Автори: Яблоков Володимир Васильович, Пеньковьський Володимир Іванович, Зіркевич Валентин Миколайович, Данилюк Володимир Євгенович, Яльницький Олег Дмитрович
МПК: F41H 5/00
Мітки: броньова, комбінована, перешкода
Формула / Реферат:
Комбінована броньова перешкода, що містить корпус, у якому розташовані зовнішній шар, внутрішній шар, тильний шар, гумова прокладка і повітряні зазори, причому перший з повітряних зазорів утворений між зовнішнім і внутрішнім шарами, другий повітряний зазор утворений між внутрішнім та тильним шарами і містить гумову прокладку по їх периметру, при цьому зовнішній шар виконаний із гомогенної стальної броні, внутрішній шар - із кераміки, тильний...
Комбінована система сонячного тепло- та холодопостачання
Номер патенту: 6714
Опубліковано: 16.05.2005
Автор: Пономарчук Ігор Анатолійович
МПК: F24J 2/06
Мітки: тепло, холодопостачання, система, комбінована, сонячного
Формула / Реферат:
1. Комбінована система тепло- та холодопостачання будівель, що містить сонячний колектор, абсорбційну холодильну машину, бак-теплоакумулятор з теплообмінником гарячого водопостачання, джерело додаткової енергії, кондиціонер повітря і підземний бак-колектор, яка відрізняється тим, що бак-теплоакумулятор з теплообмінником гарячого водопостачання підключено до конденсатора абсорбційної холодильної машини з можливістю відведення надлишкової...
Попередній патент: Пристрій та спосіб забезпечення обертання контейнера під час перевірки
Наступний патент: Вкладка для багатокомпонентних контейнерів
Випадковий патент: Форсунка пісочниці локомотива