Спосіб рятування літального апарата
Номер патенту: 98111
Опубліковано: 25.04.2012
Автори: Дронь Микола Михайлович, Хорольський Петро Георгійович
Формула / Реферат
Спосіб рятування частини літального апарата, що відокремлюється, переважно ступеня ракети-носія, що полягає у формуванні і виконанні при польоті в атмосфері заданої програми його орієнтації відносно набігаючого потоку, який відрізняється тим, що після відокремлення ступеня вимірюють його просторовий кут атаки і швидкість зміни цього кута, прогнозують промах ступеня, визначають кут атаки ступеня та/або швидкість його зміни чи швидкість зміни кута атаки, та/або момент зміни поточного значення цієї швидкості до визначеної величини, достатньої для компенсації промаху, і надають ступеню кутового руху з цими параметрами, а в разі неможливості виконання цього - перед входом в атмосферу надають ступеню обертання навколо поперечної осі з максимальною кутовою швидкістю.
Текст
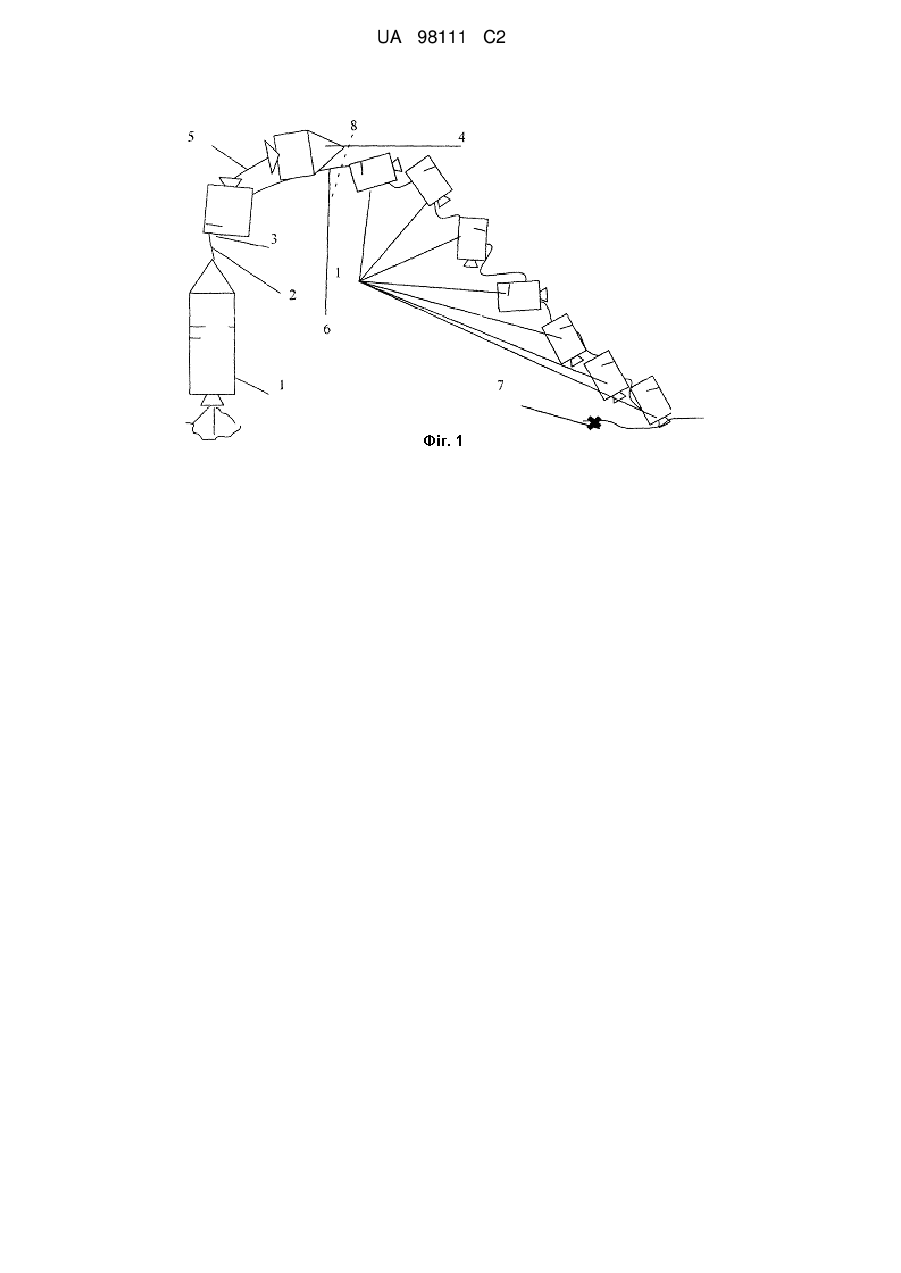
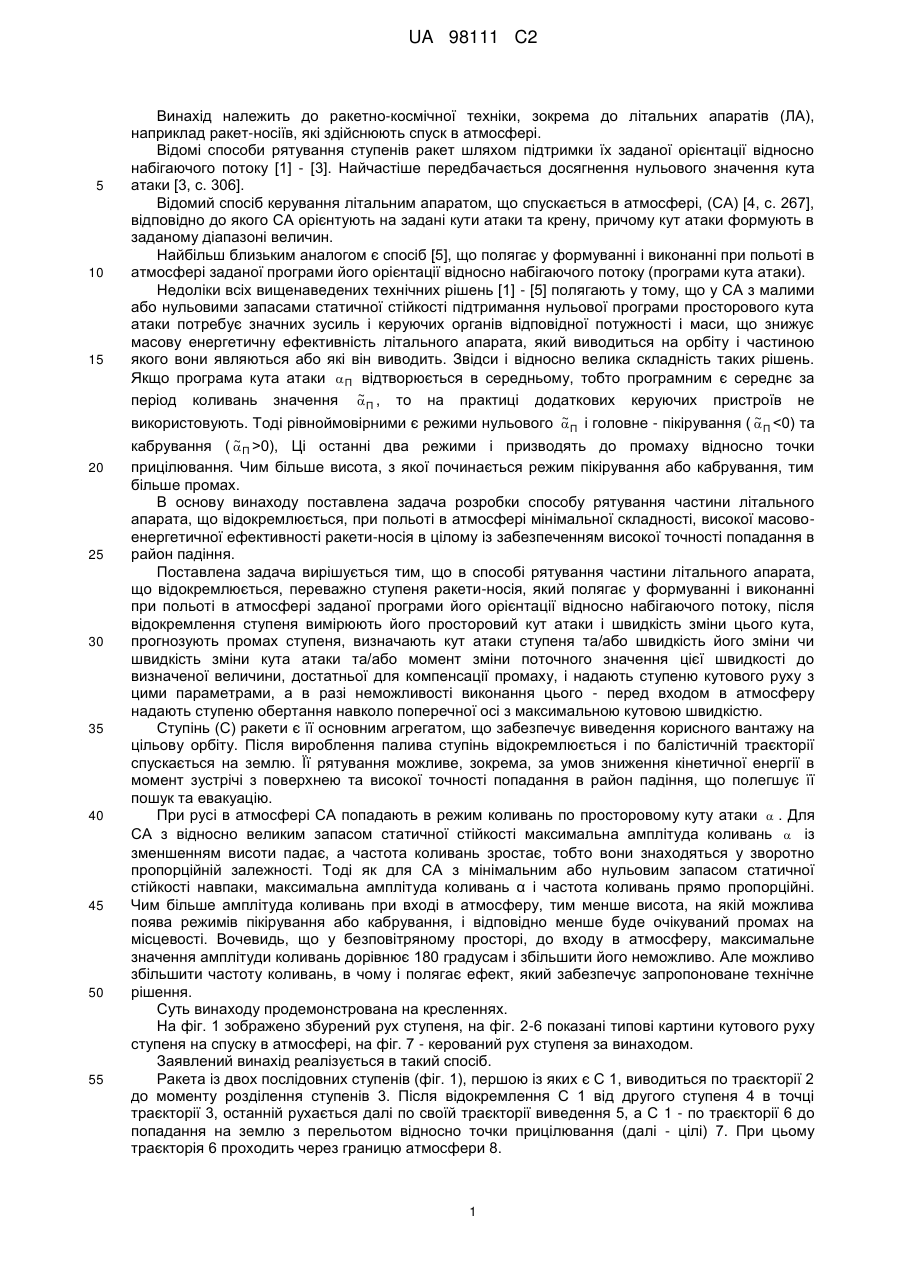
Реферат: Винахід належить до ракетно-космічної техніки, зокрема до літальних апаратів, наприклад ракет-носіїв, які здійснюють політ в атмосфері. Винахід забезпечує високу точність попадання в район падіння. В способі рятування частини літального апарата, що відокремлюється, переважно ступеня ракети-носія, що полягає у формуванні і виконанні при польоті в атмосфері заданої програми його орієнтації відносно набігаючого потоку, після відокремлення ступеня вимірюють його просторовий кут атаки і швидкість зміни цього кута, прогнозують промах ступеня, визначають кут атаки ступеня та/або швидкість його зміни чи швидкість зміни кута атаки, та/або момент зміни поточного значення цієї швидкості до визначеної величини, достатньої для компенсації промаху, і надають ступеню кутового руху з цими параметрами, а в разі неможливості виконання цього - перед входом в атмосферу надають ступеню обертання навколо поперечної осі з максимальною кутовою швидкістю. UA 98111 C2 (12) UA 98111 C2 UA 98111 C2 5 10 15 Винахід належить до ракетно-космічної техніки, зокрема до літальних апаратів (ЛА), наприклад ракет-носіїв, які здійснюють спуск в атмосфері. Відомі способи рятування ступенів ракет шляхом підтримки їх заданої орієнтації відносно набігаючого потоку [1] - [3]. Найчастіше передбачається досягнення нульового значення кута атаки [3, с. 306]. Відомий спосіб керування літальним апаратом, що спускається в атмосфері, (СА) [4, с. 267], відповідно до якого СА орієнтують на задані кути атаки та крену, причому кут атаки формують в заданому діапазоні величин. Найбільш близьким аналогом є спосіб [5], що полягає у формуванні і виконанні при польоті в атмосфері заданої програми його орієнтації відносно набігаючого потоку (програми кута атаки). Недоліки всіх вищенаведених технічних рішень [1] - [5] полягають у тому, що у СА з малими або нульовими запасами статичної стійкості підтримання нульової програми просторового кута атаки потребує значних зусиль і керуючих органів відповідної потужності і маси, що знижує масову енергетичну ефективність літального апарата, який виводиться на орбіту і частиною якого вони являються або які він виводить. Звідси і відносно велика складність таких рішень. Якщо програма кута атаки П відтворюється в середньому, тобто програмним є середнє за період 20 25 30 35 40 45 50 55 коливань значення ~ П , то на практиці додаткових керуючих пристроїв не ~ ~ використовують. Тоді рівноймовірними є режими нульового П і головне - пікірування ( П 0), Ці останні два режими і призводять до промаху відносно точки кабрування ( П прицілювання. Чим більше висота, з якої починається режим пікірування або кабрування, тим більше промах. В основу винаходу поставлена задача розробки способу рятування частини літального апарата, що відокремлюється, при польоті в атмосфері мінімальної складності, високої масовоенергетичної ефективності ракети-носія в цілому із забезпеченням високої точності попадання в район падіння. Поставлена задача вирішується тим, що в способі рятування частини літального апарата, що відокремлюється, переважно ступеня ракети-носія, який полягає у формуванні і виконанні при польоті в атмосфері заданої програми його орієнтації відносно набігаючого потоку, після відокремлення ступеня вимірюють його просторовий кут атаки і швидкість зміни цього кута, прогнозують промах ступеня, визначають кут атаки ступеня та/або швидкість його зміни чи швидкість зміни кута атаки та/або момент зміни поточного значення цієї швидкості до визначеної величини, достатньої для компенсації промаху, і надають ступеню кутового руху з цими параметрами, а в разі неможливості виконання цього - перед входом в атмосферу надають ступеню обертання навколо поперечної осі з максимальною кутовою швидкістю. Ступінь (С) ракети є її основним агрегатом, що забезпечує виведення корисного вантажу на цільову орбіту. Після вироблення палива ступінь відокремлюється і по балістичній траєкторії спускається на землю. Її рятування можливе, зокрема, за умов зниження кінетичної енергії в момент зустрічі з поверхнею та високої точності попадання в район падіння, що полегшує її пошук та евакуацію. При русі в атмосфері СА попадають в режим коливань по просторовому куту атаки . Для СА з відносно великим запасом статичної стійкості максимальна амплітуда коливань із зменшенням висоти падає, а частота коливань зростає, тобто вони знаходяться у зворотно пропорційній залежності. Тоді як для СА з мінімальним або нульовим запасом статичної стійкості навпаки, максимальна амплітуда коливань α і частота коливань прямо пропорційні. Чим більше амплітуда коливань при вході в атмосферу, тим менше висота, на якій можлива поява режимів пікірування або кабрування, і відповідно менше буде очікуваний промах на місцевості. Вочевидь, що у безповітряному просторі, до входу в атмосферу, максимальне значення амплітуди коливань дорівнює 180 градусам і збільшити його неможливо. Але можливо збільшити частоту коливань, в чому і полягає ефект, який забезпечує запропоноване технічне рішення. Суть винаходу продемонстрована на кресленнях. На фіг. 1 зображено збурений рух ступеня, на фіг. 2-6 показані типові картини кутового руху ступеня на спуску в атмосфері, на фіг. 7 - керований рух ступеня за винаходом. Заявлений винахід реалізується в такий спосіб. Ракета із двох послідовних ступенів (фіг. 1), першою із яких є С 1, виводиться по траєкторії 2 до моменту розділення ступенів 3. Після відокремлення С 1 від другого ступеня 4 в точці траєкторії 3, останній рухається далі по своїй траєкторії виведення 5, а С 1 - по траєкторії 6 до попадання на землю з перельотом відносно точки прицілювання (далі - цілі) 7. При цьому траєкторія 6 проходить через границю атмосфери 8. 1 UA 98111 C2 5 10 15 20 25 30 35 Якщо параметри кутового руху на момент входу в атмосферу, тобто на її границі 8, є номінальними - просторовий кут атаки дорівнює нулю і кутова швидкість також дорівнює нулю, - то при номінальних параметрах ступеня і атмосфери промах також дорівнюватиме нулю. Ймовірність такого випадку також практично дорівнюватиме нулю і ступінь поцілить у точку прицілювання 7. Основною особливістю С, що відокремлена від ракети, є те, що вона статично нестійка в широкому діапазоні кутів атаки і чисел Маха М. У залежності від положення центра мас С її коливання можуть відбуватися відносно положення =180° або других положень, що відповідають нульовому запасу статичної стійкості. У цих положеннях рух С відбувається в режимах пікірування або кабрування. І це є головною причиною розсіювання точок падіння. При розрахунковому значенні коефіцієнта центра мас режими пікірування і кабрування відсутні і на всій траєкторії С робить коливання відносно положення =180°, як показано на фіг. 2. В дійсності навіть малі збурені значення 0 та/або 0 , бовтанка залишків рідкого палива в баках рідинних двигунів та інші фактори приводять до того, що ступеню притаманні кутові коливання, які призводить до зміни режимів кабрування та пікірування. Виникнення цих режимів є випадковою подією. Так, при одному нерозрахунковому значенні коефіцієнта центра мас у відповідному діапазоні висот Н може спостерігатися режим кабрування, на інших висотах С робить коливання відносно положення =180° як на фіг. 3. При другому збуреному значенні коефіцієнта центра мас спостерігається режим пікірування - див. фіг. 4. Із зростанням початкового (на момент входу в атмосферу) кута атаки 0 картина ще більше погіршується з точки зору можливого промаху, як це видно на фіг. 5. Якщо С входить в атмосферу з великим початковим кутом атаки, то картина руху може мати вигляд як на фіг. 6. Таким чином, на траєкторії спуску С умовно може бути виділено три ділянки. На першій із них С робить коливання відносно положення =180°. На другій ділянці характерне різке збільшення балансувального кута атаки і рух С відбувається в режимі або кабрування, або пікірування. На цій же ділянці формується основна складова розсіювання точки падіння. На третій ділянці, у залежності від значень , 0 на границі атмосфери 8, С робить коливання або відносно положення =180°, або відносно положення, що відповідає нульовому запасу статичної стійкості. Режими пікірування і кабрування практично рівноймовірні, а відповідні їм відхилення по абсолютному значенню практично збігаються. Як наслідок, усунення одного з них скорочує промах приблизно в 2 рази. Тому, відповідно до заявленого способу, після відокремлення С вимірюють його кут атаки і швидкість зміни цього кута. Далі прогнозують характеристики промаху ступеня на місцевості, наприклад: L( t ) L L ( t ) П ( t ) ( t ) П ( t ), П П (1) 40 де: L ( t ) - поточне значення похідної промаху L по поточному значению П ; П L ( t ) - поточне значення похідної промаху L по поточному значенню П . П 45 Потім визначають кут атаки та/або швидкість його зміни на момент входу в атмосферу, чим забезпечують компенсацію промаху, наприклад із у мови: L L 0 0 0, 0 0 (2) наприклад при 0 = 0 v 0 = 0 v 0 max v 0 П ( t ) min v 0 П ( t ) min . 50 Визначають кут атаки (t) та/або швидкість обертання ступеня (t) чи швидкість обертання (t) та момент зміни поточного значення цієї швидкості до визначеної величини t , що 2 UA 98111 C2 забезпечують на моменту входження в атмосферу значення цих параметрів, визначені для компенсації промаху, наприклад як вирішення системи рівнянь: 0 ( t ) ( t ) 0 ( t ) ( t ) 5 15 20 25 (3) 0 t 0, t 0 t 0; t (4) або 0 ( t ) ( t ) 0 ( t ) ( t ) 10 0 ( t ) ( t ) 0, 0 ( t ) ( t ) 0; Надають ступеню кутового руху з цими параметрами, а в разі неможливості виконання цього - перед входом в атмосферу надають ступеню обертання навколо центра мас з максимальною кутовою швидкістю 0 . Дійсно, при русі в атмосфері причини, що визивають коливання, приведуть кутову швидкість навіть до зміни знаку. Це, як показано вище, може привести до виникнення режимів пікірування і кабрування і збільшення промаху. Але чим більше буде початкова швидкість, тим пізніше, тобто нижче по висоті, виникнуть ці режими і промах буде менше, оскільки часу польоту до землі буде менше (похідні L ( t ) та П L ( t ) - відповідно будуть меншими). Для зменшення промаху П головне - це "проскочити" висоту, де формуються режими пікірування і кабрування, або порушити умови їх виникнення. Цього, як показано вище, можна досягти максимальним збільшенням 0 , тобто максимально забезпечити відтворення якісної картини руху, показаної на фіг. 2. Керований рух ступеня за винаходом показаний на фіг. 7. Після відокремлення С 1 рухається з точки траєкторії 3 далі по своїй траєкторії виведення траєкторії 6. При цьому вимірюють його просторовий кут атаки П і П , прогнозують промах ступеня t по формулі (1). По формулах (2), (3) визначають кут атаки ступеня (t) та/або (t) для поточного моменту t, достатні для компенсації промаху. Інакше, визначають по формулах (2), (3) швидкість зміни кута атаки * та/або момент зміни (t+ t ) поточного значення цієї швидкості до визначеної величини * , достатні для компенсації промаху. В точці траєкторії, поз. 9 (для (t) та/або (t) - це 30 35 40 45 момент t, а для * - це момент (t+ t ) і точка поз. 10) придають ступеню кутовий рух з цими параметрами. А якщо неможливо провести вимірювання або визначити (t), (t) або * , (t+ t ), чи виконати кутовий рух з цими параметрами, то перед входом в атмосферу в точці поз. 10 надають ступеню обертання навколо поперечної осі з максимальною кутовою швидкістю переважно в площині польоту. При подальшому русі С 1 продовжує обертатися як на поз. 11. Внаслідок атмосферного гальмування швидкість кутового руху зменшується, його амплітуда падає і С 1 переходить від обертання до коливань з великою амплітудою на поз. 12. На поз. 13 та 14 амплітуда послідовно зменшується до попадання в ціль в точці 7 - поз. 15. Для руху С 1 з визначеними вище параметрами забезпечується його попадання в ціль 7 завдяки розрахунковому характеру кутового руху. А у випадку реалізації максимально можливої для даної реалізації С 1 кутової швидкості самий такий характер обертання і потім коливань призводить до осереднення відхилень центра мас ступеня від розрахункової траєкторії. І це відбувається тим краще, чим більше ця швидкість, і, відповідно, тим ближче до нуля кінцевий промах С 1. Вказана закрутка ступеня відбувається поза атмосферою і тому може бути забезпечена одноразово встановленими на С ракетними двигунами відносно малої потужності і, відповідно, маси на відміну від потужних пристроїв, що забезпечують керування в атмосфері весь час спуску в ній в умовах великих швидкісних напорів. Це зменшує складність конструкції, підвищує масово-енергетичну ефективність ракети-носія в цілому і підвищує при цьому точність попадання. Таким чином, вирішена задача розробки способу рятування частини літального апарата, що відокремлюється, при польоті в атмосфері мінімальної складності, масово-енергетичної 3 UA 98111 C2 5 10 ефективності ракети-носія в цілому із забезпеченням високої точності попадання в район падіння. Джерела інформації: 1) US 6076771 А, В64G 1/62. 2) RU 2043954 С1, В64G 1/24. 3) Герасюта Н.Ф., Новиков А.В., Белецкая Н.Г. Динамика полета. Основные задачи динамического проектирования ракет. - Днепропетровск: ГКБ "Южное", НПЦ "ЭКОСИГидрофизнка", 1998.-366 с. 4) Сихарулидзе Ю. Г. Баллистика летательных аппаратов. - М.: Наука, 1982.-352 с. 5) Пат. UA 20362, МПК В64 G 1/00, F42 В 15/00. ФОРМУЛА ВИНАХОДУ 15 20 Спосіб рятування частини літального апарата, що відокремлюється, переважно ступеня ракетиносія, що полягає у формуванні і виконанні при польоті в атмосфері заданої програми його орієнтації відносно набігаючого потоку, який відрізняється тим, що після відокремлення ступеня вимірюють його просторовий кут атаки і швидкість зміни цього кута, прогнозують промах ступеня, визначають кут атаки ступеня та/або швидкість його зміни чи швидкість зміни кута атаки, та/або момент зміни поточного значення цієї швидкості до визначеної величини, достатньої для компенсації промаху, і надають ступеню кутового руху з цими параметрами, а в разі неможливості виконання цього - перед входом в атмосферу надають ступеню обертання навколо поперечної осі з максимальною кутовою швидкістю. 4 UA 98111 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of aircraft rescue
Автори англійськоюDron Mykola Mykhailovych, Khorolskyi Petro Heorhiiovych
Назва патенту російськоюСпособ спасения летательного аппарата
Автори російськоюДронь Николай Михайлович, Хорольский Петр Георгиевич
МПК / Мітки
МПК: B64G 1/62, F42B 10/00
Мітки: апарата, літального, рятування, спосіб
Код посилання
<a href="https://ua.patents.su/7-98111-sposib-ryatuvannya-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб рятування літального апарата</a>
Спосіб рятування частини літального апарата
Номер патенту: 88049
Опубліковано: 10.09.2009
Автори: Хорольський Петро Георгійович, Дронь Микола Михайлович
МПК: B64G 1/00, F42B 15/00
Мітки: апарата, літального, спосіб, частини, рятування
Формула / Реферат:
Спосіб рятування частини літального апарата, що відокремлюється, переважно ступеня ракети-носія, який полягає у формуванні заданої орієнтації ступеня відносно набігаючого потоку при польоті в атмосфері, який відрізняється тим, що при вході в атмосферу ступінь розвертають поздовжньою віссю перпендикулярно площині польоту і утримують його в такому положенні та закручують навколо поздовжньої осі.
Пристрій для рятування частини літального апарата, що відокремлюється, та спосіб його використання
Номер патенту: 98106
Опубліковано: 25.04.2012
Автори: Хорольський Петро Георгійович, Дронь Микола Михайлович
МПК: B64G 1/62, F42B 10/00
Мітки: рятування, спосіб, апарата, використання, літального, пристрій, відокремлюється, частини
Формула / Реферат:
1. Пристрій для рятування частини літального апарата, що відокремлюється, переважно ступеня ракети-носія, який включає систему керування ступеня і рятівну двигунну установку, інформаційні входи-виходи яких з'єднані між собою, який відрізняється тим, що в нього додатково введений датчик просторового кута атаки, установлений на ступені, а рятівна двигунна установка виконана у вигляді парного числа сопел, наприклад щілинних, і газонапірної...
Спосіб аварійного рятування літального апарата
Номер патенту: 49951
Опубліковано: 15.10.2002
Автори: Савченко Микола Миколайович, Савченко Микола Федорович
МПК: B64D 17/00
Мітки: літального, спосіб, рятування, аварійного, апарата
Формула / Реферат:
1. Спосіб аварійного рятування літального апарата, за допомогою парашута, попередньо у складеному вигляді, змонтованому у щілиноподібному технологічному люці з системою його розкриття під час аварії для вивільнення парашута і під дією повітряного потоку подальшого розгортання купола парашута для зменшення швидкості падіння і стабілізації розташування літального апарата у просторі під час приземлення, який відрізняється тим, що вивільнення...
Спосіб і система для виявлення ушкодження ротора двигуна літального апарата і двигун літального апарата
Номер патенту: 82462
Опубліковано: 25.04.2008
Автори: Еван Філіпп, Компера Патрік
МПК: G01M 1/22, G01H 1/00, F01D 21/00
Мітки: виявлення, ушкодження, апарата, двигун, спосіб, літального, двигуна, ротора, система
Формула / Реферат:
1. Спосіб виявлення ушкодження ротора двигуна літального апарата, який включає вимірювання вібрації і швидкості для збору даних, які характеризують швидкість обертання ротора, а також амплітуду і фазу його вібрації під час контрольованого польоту, який відрізняється тим, щозчитують зібрані дані,на основі зібраних даних обчислюють середній вектор вібрації в вибраному інтервалі швидкостей обертання ротора, причому амплітуда...
Адаптивний спосіб стабілізації космічного літального апарата
Номер патенту: 47349
Опубліковано: 25.01.2010
Автори: Єрмолов Денис Олегович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: адаптивний, космічного, спосіб, апарата, літального, стабілізації
Формула / Реферат:
Адаптивний спосіб стабілізації космічного літального апарата, який полягає в тому, що вимірюють кут і кутову швидкість космічного літального апарата, формують керуючий сигнал, створюють керуючий момент за допомогою релейних виконавчих органів, який відрізняється тим, що при збільшенні кута заданого значення однієї полярності визначають величину мінімального керуючого імпульсу шляхом вмикання, а потім вимкнення керуючого сигналу як тільки...
Попередній патент: Спосіб лікування діастазу прямих м’язів живота
Наступний патент: Будівельний модуль або блок із системою закладних з’єднувачів
Випадковий патент: Ланка гусеничного ланцюга транспортного засобу