Пристрій наповнювання та дозування за вагою
Формула / Реферат
1. Пристрій наповнювання та дозування за вагою контейнерів із циліндричним горлом і кільцем навколо горла, що складається зі з'єднаних між собою захоплювача і механізму зважування контейнерів під час їх наповнення; при цьому захоплювач складається з двох рухомих у горизонтальній площині щелеп, прикріплених до несучої планки та з'єднаних між собою пружиною; щелепи у своїй передній частині утворюють отвір у вигляді кола для охоплення горла контейнера, який відрізняється тим, що пружина (11) захоплювача (7) з'єднана одночасно із задніми частинами обох рухомих щелеп (8), що прикріплені до несучої планки (10), причому між середніми частинами двох рухомих щелеп (8) прикріплений знімний фіксатор (13), що складається з несучого тіла (17), приєднаного до несучої планки (10); при цьому до несучого тіла (17) за допомогою підпружиненого шарніра прикріплений фіксаційний елемент (18), у передній частині якого виконаний виступ (14), що дозволяє притиснути верхню частину поверхні кільця (6) циліндричного горла (5) контейнера (4).
2. Пристрій за п. 1, який відрізняється тим, що обидві рухомі щелепи (8) захоплювача (7) прикріплені до несучої планки (10) так, щоб охоплювати циліндричне горло (5) контейнера (4) під кільцем (6).
3. Пристрій за будь-яким із пп. 1, 2, який відрізняється тим, що механізм зважування (3) виконаний закритим герметично та є зв'язаним із заднім кінцем несучої планки (10).
Текст
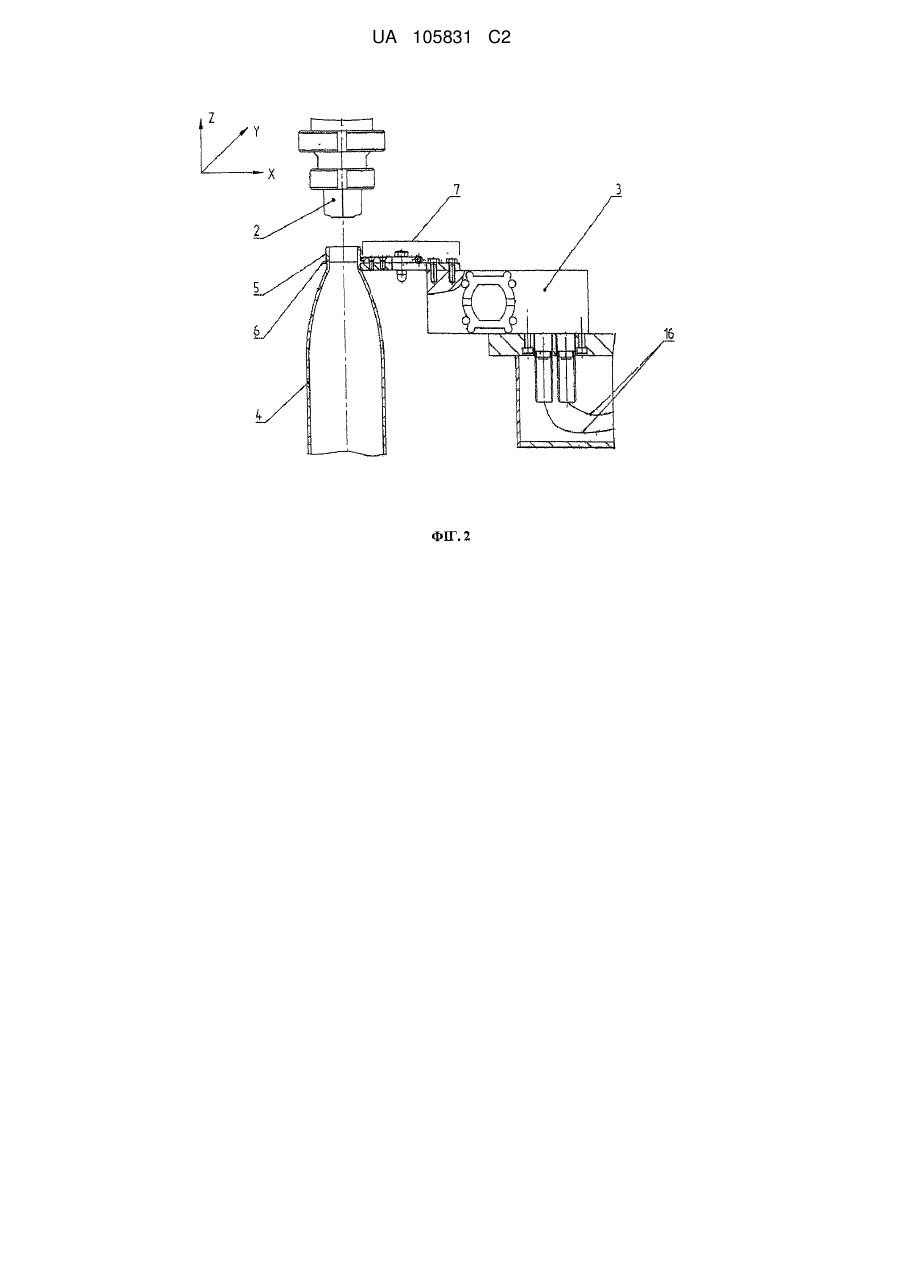
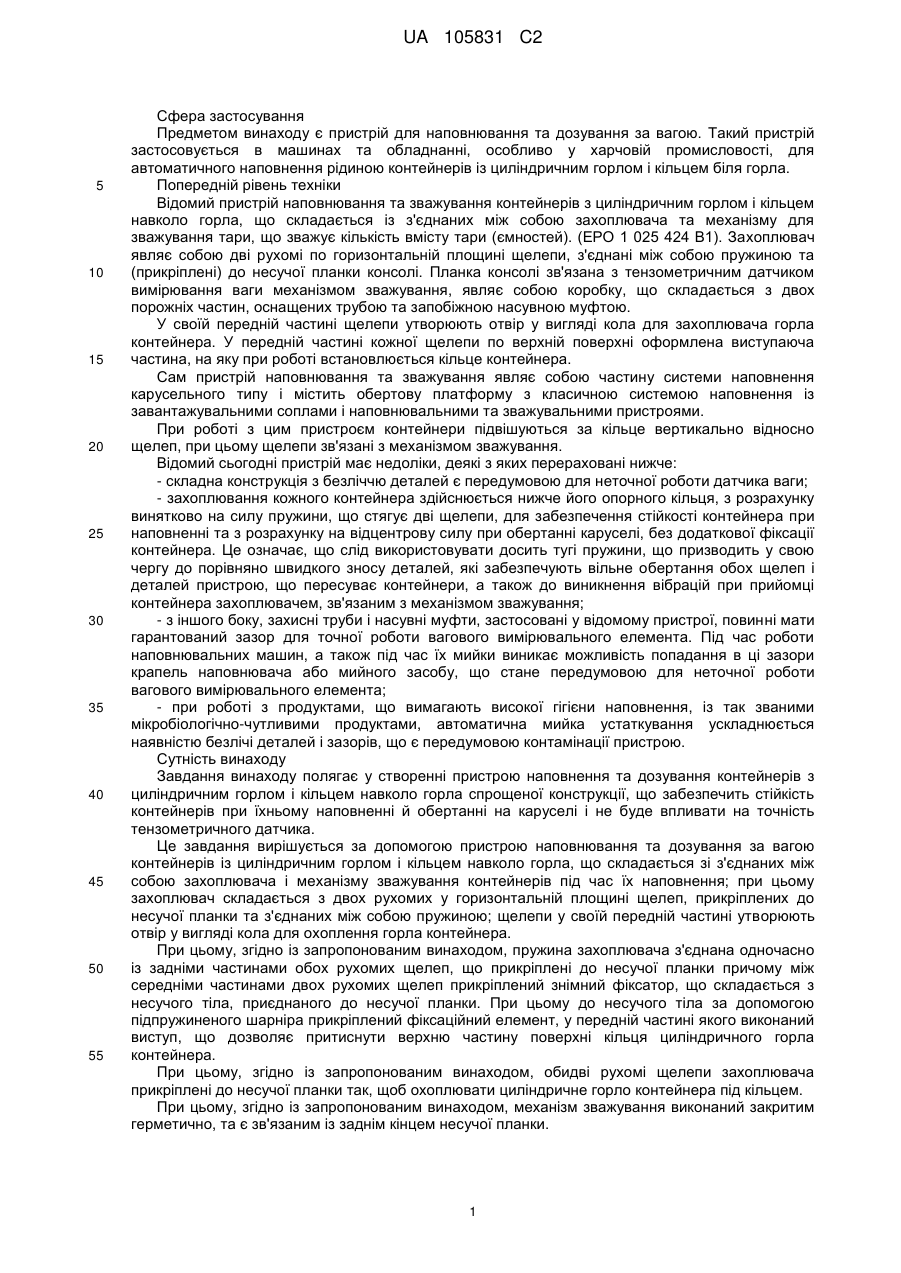
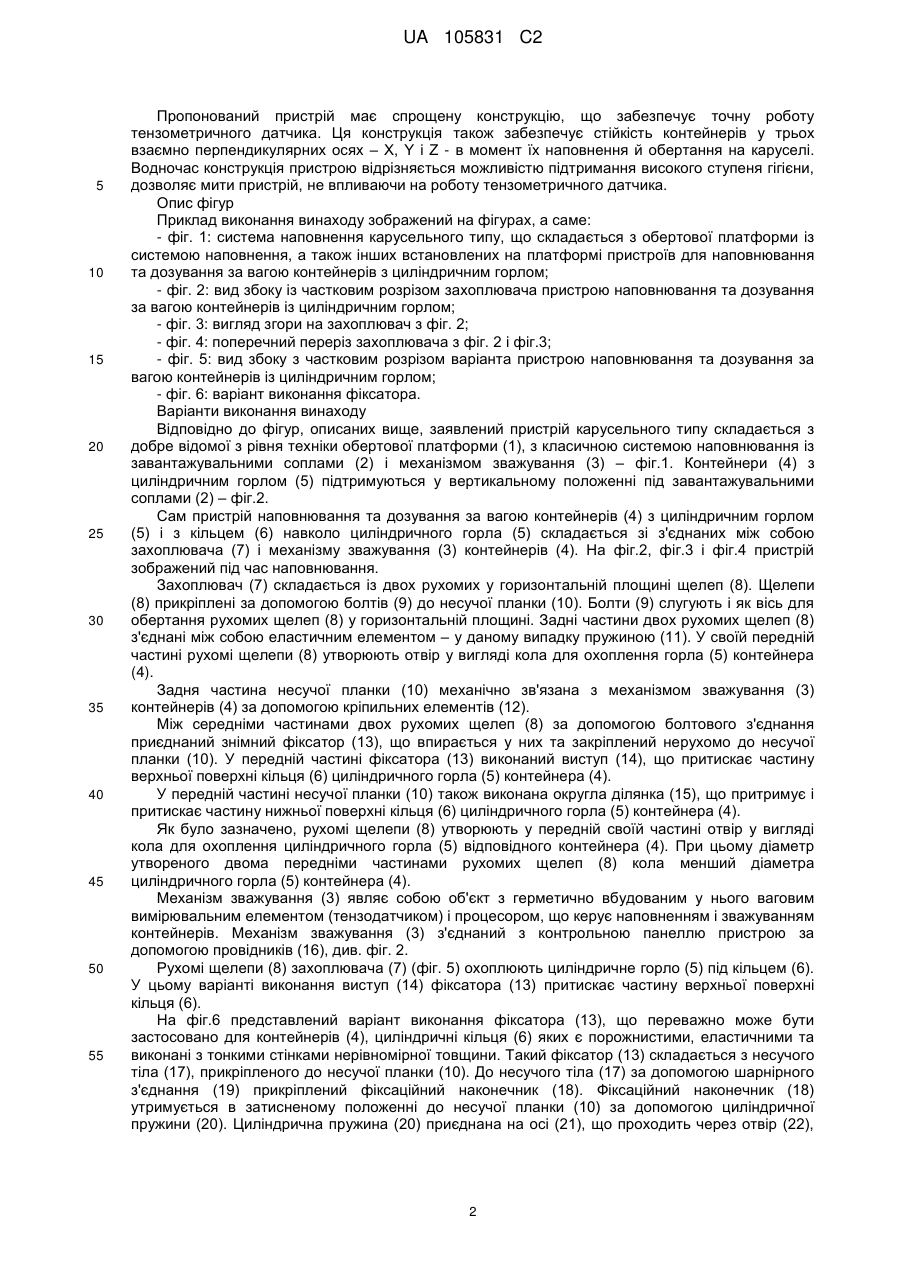
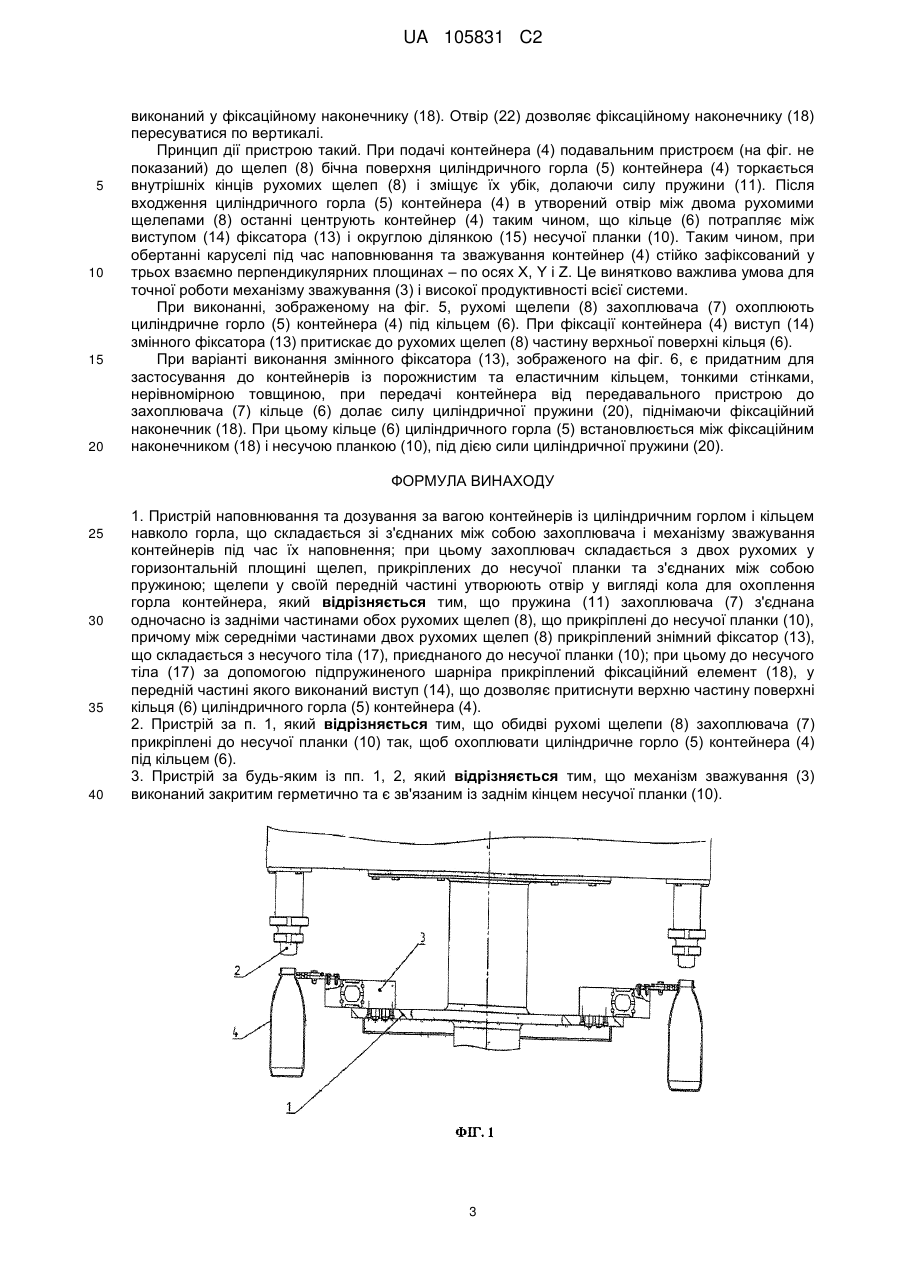
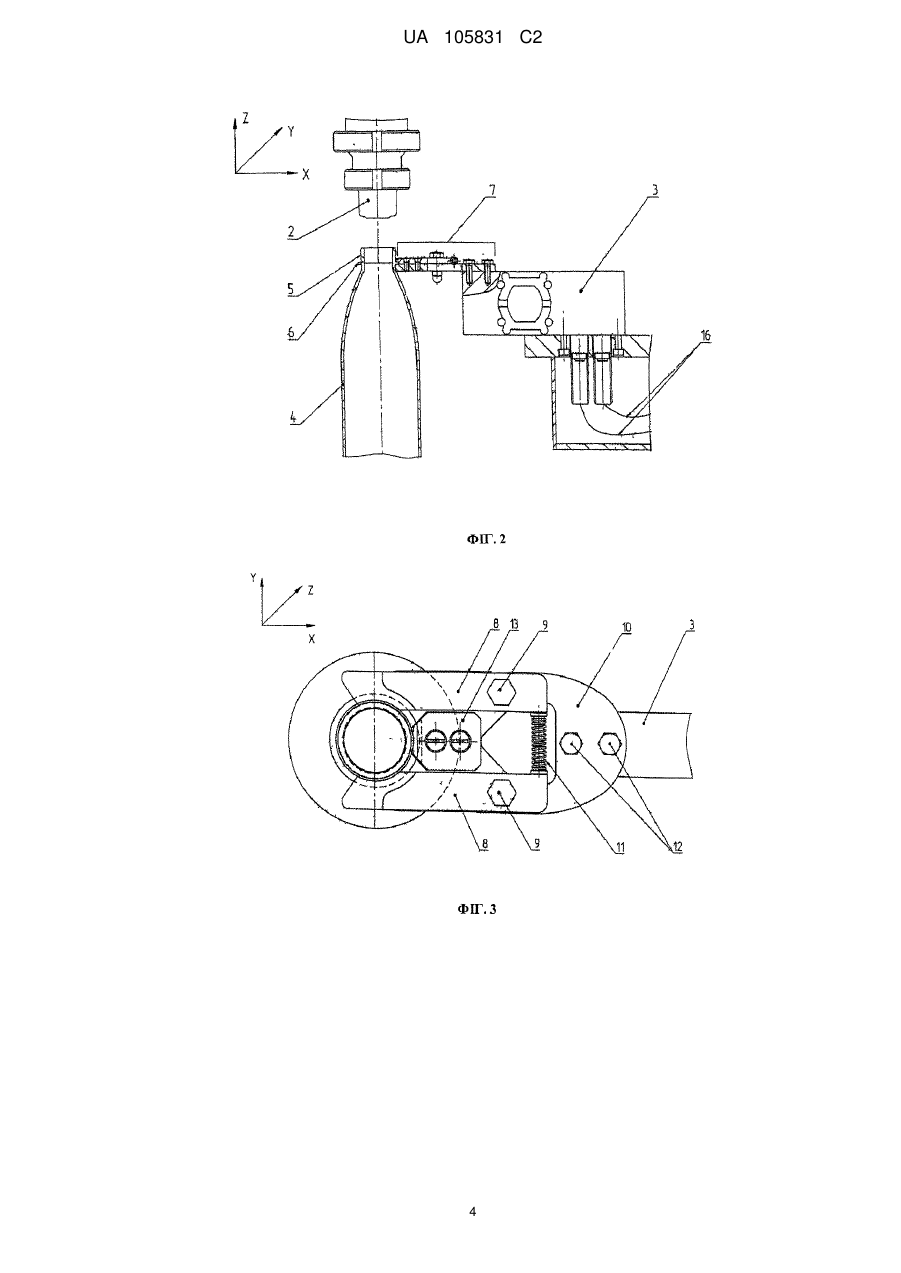
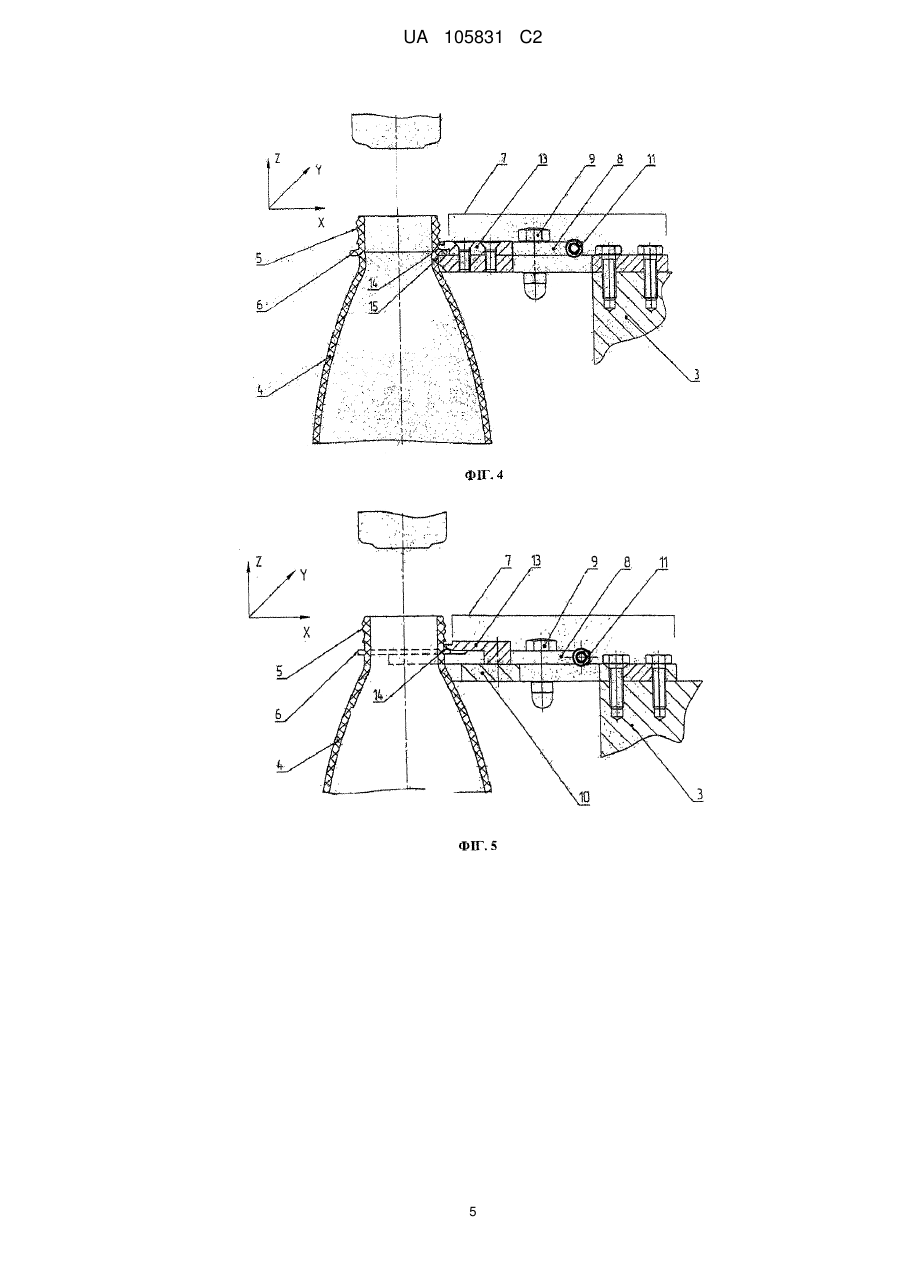
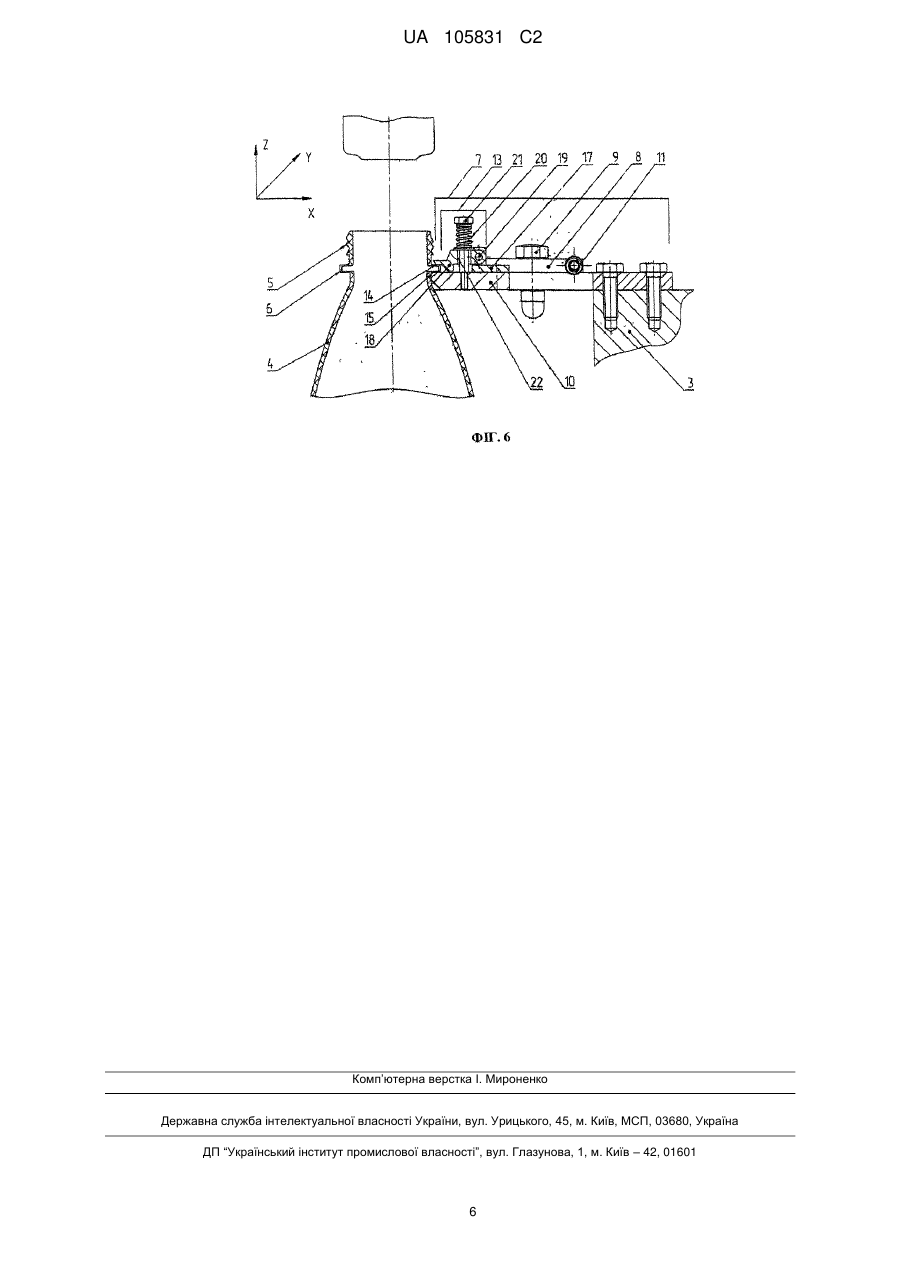
Реферат: Пристрій призначений для наповнювання та дозування за вагою контейнерів із циліндричним горлом і кільцем навколо горла. Пристрій складається зі з'єднаних між собою захоплювача (7) та механізму зважування (3) закритого типу. В одному варіанті виконання захоплювач (7) складається з двох рухомих по горизонтальній площині щелеп (8), прикріплених до несучої планки (10) і з'єднаних між собою пружиною (11). Між середніми частинами двох рухомих щелеп (8) розташований змінний фіксатор (13), закріплений до несучої планки (10). У передній частині змінного фіксатора (13) виконаний виступ (14), що притискає частину верхньої поверхні кільця (6) циліндричного горла (5) контейнера (4). У передній частині несучої планки (10) виконана округла ділянка (15), що слугує для притискання та підтримки частини нижньої поверхні кільця (6) циліндричного горла (5). UA 105831 C2 (12) UA 105831 C2 UA 105831 C2 5 10 15 20 25 30 35 40 45 50 55 Сфера застосування Предметом винаходу є пристрій для наповнювання та дозування за вагою. Такий пристрій застосовується в машинах та обладнанні, особливо у харчовій промисловості, для автоматичного наповнення рідиною контейнерів із циліндричним горлом і кільцем біля горла. Попередній рівень техніки Відомий пристрій наповнювання та зважування контейнерів з циліндричним горлом і кільцем навколо горла, що складається із з'єднаних між собою захоплювача та механізму для зважування тари, що зважує кількість вмісту тари (ємностей). (EPO 1 025 424 B1). Захоплювач являє собою дві рухомі по горизонтальній площині щелепи, з'єднані між собою пружиною та (прикріплені) до несучої планки консолі. Планка консолі зв'язана з тензометричним датчиком вимірювання ваги механізмом зважування, являє собою коробку, що складається з двох порожніх частин, оснащених трубою та запобіжною насувною муфтою. У своїй передній частині щелепи утворюють отвір у вигляді кола для захоплювача горла контейнера. У передній частині кожної щелепи по верхній поверхні оформлена виступаюча частина, на яку при роботі встановлюється кільце контейнера. Сам пристрій наповнювання та зважування являє собою частину системи наповнення карусельного типу і містить обертову платформу з класичною системою наповнення із завантажувальними соплами і наповнювальними та зважувальними пристроями. При роботі з цим пристроєм контейнери підвішуються за кільце вертикально відносно щелеп, при цьому щелепи зв'язані з механізмом зважування. Відомий сьогодні пристрій має недоліки, деякі з яких перераховані нижче: - складна конструкція з безліччю деталей є передумовою для неточної роботи датчика ваги; - захоплювання кожного контейнера здійснюється нижче його опорного кільця, з розрахунку винятково на силу пружини, що стягує дві щелепи, для забезпечення стійкості контейнера при наповненні та з розрахунку на відцентрову силу при обертанні каруселі, без додаткової фіксації контейнера. Це означає, що слід використовувати досить тугі пружини, що призводить у свою чергу до порівняно швидкого зносу деталей, які забезпечують вільне обертання обох щелеп і деталей пристрою, що пересуває контейнери, а також до виникнення вібрацій при прийомці контейнера захоплювачем, зв'язаним з механізмом зважування; - з іншого боку, захисні труби і насувні муфти, застосовані у відомому пристрої, повинні мати гарантований зазор для точної роботи вагового вимірювального елемента. Під час роботи наповнювальних машин, а також під час їх мийки виникає можливість попадання в ці зазори крапель наповнювача або мийного засобу, що стане передумовою для неточної роботи вагового вимірювального елемента; - при роботі з продуктами, що вимагають високої гігієни наповнення, із так званими мікробіологічно-чутливими продуктами, автоматична мийка устаткування ускладнюється наявністю безлічі деталей і зазорів, що є передумовою контамінації пристрою. Сутність винаходу Завдання винаходу полягає у створенні пристрою наповнення та дозування контейнерів з циліндричним горлом і кільцем навколо горла спрощеної конструкції, що забезпечить стійкість контейнерів при їхньому наповненні й обертанні на каруселі і не буде впливати на точність тензометричного датчика. Це завдання вирішується за допомогою пристрою наповнювання та дозування за вагою контейнерів із циліндричним горлом і кільцем навколо горла, що складається зі з'єднаних між собою захоплювача і механізму зважування контейнерів під час їх наповнення; при цьому захоплювач складається з двох рухомих у горизонтальній площині щелеп, прикріплених до несучої планки та з'єднаних між собою пружиною; щелепи у своїй передній частині утворюють отвір у вигляді кола для охоплення горла контейнера. При цьому, згідно із запропонованим винаходом, пружина захоплювача з'єднана одночасно із задніми частинами обох рухомих щелеп, що прикріплені до несучої планки причому між середніми частинами двох рухомих щелеп прикріплений знімний фіксатор, що складається з несучого тіла, приєднаного до несучої планки. При цьому до несучого тіла за допомогою підпружиненого шарніра прикріплений фіксаційний елемент, у передній частині якого виконаний виступ, що дозволяє притиснути верхню частину поверхні кільця циліндричного горла контейнера. При цьому, згідно із запропонованим винаходом, обидві рухомі щелепи захоплювача прикріплені до несучої планки так, щоб охоплювати циліндричне горло контейнера під кільцем. При цьому, згідно із запропонованим винаходом, механізм зважування виконаний закритим герметично, та є зв'язаним із заднім кінцем несучої планки. 1 UA 105831 C2 5 10 15 20 25 30 35 40 45 50 55 Пропонований пристрій має спрощену конструкцію, що забезпечує точну роботу тензометричного датчика. Ця конструкція також забезпечує стійкість контейнерів у трьох взаємно перпендикулярних осях – X, Y і Z - в момент їх наповнення й обертання на каруселі. Водночас конструкція пристрою відрізняється можливістю підтримання високого ступеня гігієни, дозволяє мити пристрій, не впливаючи на роботу тензометричного датчика. Опис фігур Приклад виконання винаходу зображений на фігурах, а саме: - фіг. 1: система наповнення карусельного типу, що складається з обертової платформи із системою наповнення, а також інших встановлених на платформі пристроїв для наповнювання та дозування за вагою контейнерів з циліндричним горлом; - фіг. 2: вид збоку із частковим розрізом захоплювача пристрою наповнювання та дозування за вагою контейнерів із циліндричним горлом; - фіг. 3: вигляд згори на захоплювач з фіг. 2; - фіг. 4: поперечний переріз захоплювача з фіг. 2 і фіг.3; - фіг. 5: вид збоку з частковим розрізом варіанта пристрою наповнювання та дозування за вагою контейнерів із циліндричним горлом; - фіг. 6: варіант виконання фіксатора. Варіанти виконання винаходу Відповідно до фігур, описаних вище, заявлений пристрій карусельного типу складається з добре відомої з рівня техніки обертової платформи (1), з класичною системою наповнювання із завантажувальними соплами (2) і механізмом зважування (3) – фіг.1. Контейнери (4) з циліндричним горлом (5) підтримуються у вертикальному положенні під завантажувальними соплами (2) – фіг.2. Сам пристрій наповнювання та дозування за вагою контейнерів (4) з циліндричним горлом (5) і з кільцем (6) навколо циліндричного горла (5) складається зі з'єднаних між собою захоплювача (7) і механізму зважування (3) контейнерів (4). На фіг.2, фіг.3 і фіг.4 пристрій зображений під час наповнювання. Захоплювач (7) складається із двох рухомих у горизонтальній площині щелеп (8). Щелепи (8) прикріплені за допомогою болтів (9) до несучої планки (10). Болти (9) слугують і як вісь для обертання рухомих щелеп (8) у горизонтальній площині. Задні частини двох рухомих щелеп (8) з'єднані між собою еластичним елементом – у даному випадку пружиною (11). У своїй передній частині рухомі щелепи (8) утворюють отвір у вигляді кола для охоплення горла (5) контейнера (4). Задня частина несучої планки (10) механічно зв'язана з механізмом зважування (3) контейнерів (4) за допомогою кріпильних елементів (12). Між середніми частинами двох рухомих щелеп (8) за допомогою болтового з'єднання приєднаний знімний фіксатор (13), що впирається у них та закріплений нерухомо до несучої планки (10). У передній частині фіксатора (13) виконаний виступ (14), що притискає частину верхньої поверхні кільця (6) циліндричного горла (5) контейнера (4). У передній частині несучої планки (10) також виконана округла ділянка (15), що притримує і притискає частину нижньої поверхні кільця (6) циліндричного горла (5) контейнера (4). Як було зазначено, рухомі щелепи (8) утворюють у передній своїй частині отвір у вигляді кола для охоплення циліндричного горла (5) відповідного контейнера (4). При цьому діаметр утвореного двома передніми частинами рухомих щелеп (8) кола менший діаметра циліндричного горла (5) контейнера (4). Механізм зважування (3) являє собою об'єкт з герметично вбудованим у нього ваговим вимірювальним елементом (тензодатчиком) і процесором, що керує наповненням і зважуванням контейнерів. Механізм зважування (3) з'єднаний з контрольною панеллю пристрою за допомогою провідників (16), див. фіг. 2. Рухомі щелепи (8) захоплювача (7) (фіг. 5) охоплюють циліндричне горло (5) під кільцем (6). У цьому варіанті виконання виступ (14) фіксатора (13) притискає частину верхньої поверхні кільця (6). На фіг.6 представлений варіант виконання фіксатора (13), що переважно може бути застосовано для контейнерів (4), циліндричні кільця (6) яких є порожнистими, еластичними та виконані з тонкими стінками нерівномірної товщини. Такий фіксатор (13) складається з несучого тіла (17), прикріпленого до несучої планки (10). До несучого тіла (17) за допомогою шарнірного з'єднання (19) прикріплений фіксаційний наконечник (18). Фіксаційний наконечник (18) утримується в затисненому положенні до несучої планки (10) за допомогою циліндричної пружини (20). Циліндрична пружина (20) приєднана на осі (21), що проходить через отвір (22), 2 UA 105831 C2 5 10 15 20 виконаний у фіксаційному наконечнику (18). Отвір (22) дозволяє фіксаційному наконечнику (18) пересуватися по вертикалі. Принцип дії пристрою такий. При подачі контейнера (4) подавальним пристроєм (на фіг. не показаний) до щелеп (8) бічна поверхня циліндричного горла (5) контейнера (4) торкається внутрішніх кінців рухомих щелеп (8) і зміщує їх убік, долаючи силу пружини (11). Після входження циліндричного горла (5) контейнера (4) в утворений отвір між двома рухомими щелепами (8) останні центрують контейнер (4) таким чином, що кільце (6) потрапляє між виступом (14) фіксатора (13) і округлою ділянкою (15) несучої планки (10). Таким чином, при обертанні каруселі під час наповнювання та зважування контейнер (4) стійко зафіксований у трьох взаємно перпендикулярних площинах – по осях X, Y і Z. Це винятково важлива умова для точної роботи механізму зважування (3) і високої продуктивності всієї системи. При виконанні, зображеному на фіг. 5, рухомі щелепи (8) захоплювача (7) охоплюють циліндричне горло (5) контейнера (4) під кільцем (6). При фіксації контейнера (4) виступ (14) змінного фіксатора (13) притискає до рухомих щелеп (8) частину верхньої поверхні кільця (6). При варіанті виконання змінного фіксатора (13), зображеного на фіг. 6, є придатним для застосування до контейнерів із порожнистим та еластичним кільцем, тонкими стінками, нерівномірною товщиною, при передачі контейнера від передавального пристрою до захоплювача (7) кільце (6) долає силу циліндричної пружини (20), піднімаючи фіксаційний наконечник (18). При цьому кільце (6) циліндричного горла (5) встановлюється між фіксаційним наконечником (18) і несучою планкою (10), під дією сили циліндричної пружини (20). ФОРМУЛА ВИНАХОДУ 25 30 35 40 1. Пристрій наповнювання та дозування за вагою контейнерів із циліндричним горлом і кільцем навколо горла, що складається зі з'єднаних між собою захоплювача і механізму зважування контейнерів під час їх наповнення; при цьому захоплювач складається з двох рухомих у горизонтальній площині щелеп, прикріплених до несучої планки та з'єднаних між собою пружиною; щелепи у своїй передній частині утворюють отвір у вигляді кола для охоплення горла контейнера, який відрізняється тим, що пружина (11) захоплювача (7) з'єднана одночасно із задніми частинами обох рухомих щелеп (8), що прикріплені до несучої планки (10), причому між середніми частинами двох рухомих щелеп (8) прикріплений знімний фіксатор (13), що складається з несучого тіла (17), приєднаного до несучої планки (10); при цьому до несучого тіла (17) за допомогою підпружиненого шарніра прикріплений фіксаційний елемент (18), у передній частині якого виконаний виступ (14), що дозволяє притиснути верхню частину поверхні кільця (6) циліндричного горла (5) контейнера (4). 2. Пристрій за п. 1, який відрізняється тим, що обидві рухомі щелепи (8) захоплювача (7) прикріплені до несучої планки (10) так, щоб охоплювати циліндричне горло (5) контейнера (4) під кільцем (6). 3. Пристрій за будь-яким із пп. 1, 2, який відрізняється тим, що механізм зважування (3) виконаний закритим герметично та є зв'язаним із заднім кінцем несучої планки (10). 3 UA 105831 C2 4 UA 105831 C2 5 UA 105831 C2 Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюContainer-filing and wbight-retated dosing device
Автори англійськоюSpasov, Petar Georgiev, Minchev, Evgeni Ivanov
Автори російськоюСпасов Петар Георгиев, Минчев Евгени Иванов
МПК / Мітки
МПК: B65G 47/84, B67C 3/20, B67C 3/24
Мітки: вагою, дозування, наповнювання, пристрій
Код посилання
<a href="https://ua.patents.su/8-105831-pristrijj-napovnyuvannya-ta-dozuvannya-za-vagoyu.html" target="_blank" rel="follow" title="База патентів України">Пристрій наповнювання та дозування за вагою</a>
Пристрій для наповнювання банок продуктом
Номер патенту: 8869
Опубліковано: 30.09.1996
Автори: Авраменко Євгеній Павлович, Мордвинкін Віктор Якович, Гінзбург Ісак Давидович
МПК: B65B 3/10
Мітки: банок, продуктом, пристрій, наповнювання
Формула / Реферат:
1. Устройство для наполнения банок продуктом, состоящее из карусели с укрепленными по ее окружности дозаторами, каждый из которых включает гильзу, нижняя часть которой имеет диаметр, меньший диаметра банки, и смонтированный в ней поршень, продуктопровода, подъемно-опускных столиков для тары, копира для их перемещения и звездочек для подачи пустых и съема заполненных банок со столиков, отличающееся тем, что, с целью исключения попадания...
Пристрій для наповнювання банок в’язким продуктом
Номер патенту: 12146
Опубліковано: 25.12.1996
Автори: Мордвинкін Віктор Якович, Авраменко Євгеній Павлович
МПК: B65B 3/10
Мітки: банок, наповнювання, продуктом, в'язким, пристрій
Формула / Реферат:
Устройство для наполнения банок вязкими продуктами по авт. св. № 721351, отличающееся тем, что, с целью предотвращения прилипания продукта к грузам дозаторов, оно снабжено установленным в зоне начала наполнения банок продуктом соплом, соединенным с источником жидкости и обращенным в сторону грузов дозаторов.
Пристрій для дозування й аерозолізації аерозолізованого матеріалу та система для дозування й сухого розпилення матеріалу, що розпорошується (варіанти)
Номер патенту: 103921
Опубліковано: 10.12.2013
Автори: Іваченко Петер, Віндт Хорст, Польманн Герхард, Кох Вольфганг, Кіст Міхель
МПК: A61M 11/06, A61M 15/00, A61M 11/02
Мітки: розпорошується, система, розпилення, сухого, дозування, пристрій, аерозолізованого, аерозолізації, матеріалу, варіанти
Формула / Реферат:
1. Пристрій для дозування й аерозолізації аерозолізованого матеріалу, що містить:корпус із каналом аерозолізації, який має дистальну приєднувальну частину, що з'єднується з джерелом газу-носія, яке подає імпульси тиску газу у канал аерозолізації, і проксимальну приєднувальну частину для виводу аерозолізованого матеріалу у напрямку до пацієнта,резервуар для розміщення аерозолізованого матеріалу, що має стінки, герметично...
Пристрій для ушивання малих ран у хворих з надмірною вагою тіла при лапароскопічних операціях
Номер патенту: 23099
Опубліковано: 10.05.2007
Автори: Гайдаржі Євген Іванович, Ніконенко Олександр Семенович, Децик Дмитро Анатолійович, Головко Микола Григорович, Завгородній Сергій Миколайович, Клименко Андрій Володимирович, Русанов Ігор Володимирович, Доля Олег Сергійович
МПК: A61B 17/04
Мітки: тіла, операціях, лапароскопічних, вагою, надмірною, малих, ушивання, пристрій, хворих, ран
Формула / Реферат:
Пристрій для ушивання малих ран у хворих з надмірною вагою тіла при лапароскопічних операціях, що містить рукоятку та голку, який відрізняється тим, що рукоятка монолітно переходить в основу голки.
Пристрій для дозування вапняного молока
Номер патенту: 5033
Опубліковано: 15.02.2005
Автори: Науменко Олександр Васильович, Лисюк Павло Ігорович, Науменко Василь Дмитрович, Науменко Ігор Васильович
МПК: G01F 11/10
Мітки: пристрій, вапняного, молока, дозування
Формула / Реферат:
Пристрій для дозування вапняного молока, що містить бункер зі зливним отвором, який відрізняється тим, що всередині бункера встановлюється балка, на якій закріплюються два незалежних порожнистих всередині вали, до яких приєднуються ковші для дозування вапняного молока, а ззовні бункера вали прикріплюються через підшипники до стінок бункера, з прилаштованими до них приймальними ємкостями віддозованого вапняного молока, і до приводів обертання,...
Попередній патент: Спосіб виготовлення засобу для лікування туберкульозу і засіб, виготовлений цим способом
Наступний патент: Транспортувальний контейнер для обмотки або блока обмоток
Випадковий патент: Форма для виготовлення тротуарних та лицювальних плиток з бетонних сумішей