Рухлива наземна двокоординатна радіолокаційна станція кругового огляду метрового діапазону
Номер патенту: 107737
Опубліковано: 10.02.2015
Автори: Ременяк Валерій Петрович, Сичов Олександр Миколайович, Єфремов Юрій Георгійович, Зарецький Євген Вікторович
Формула / Реферат
1. Рухлива наземна двокоординатна радіолокаційна станція (РЛС) кругового огляду метрового діапазону, що містить основну і компенсаційні антени, формувач зондуючих сигналів, твердотільний передавач, приймачі основного і компенсаційного каналів, автокомпенсатор, пристрій первинної обробки, пристрій вторинної обробки і спряження та пристрій відображення, управління і контролю, причому вихід твердотільного передавача з'єднаний із входом основної антени, вихід основної антени з'єднаний із першим входом приймача основного каналу, перший вихід приймача основного каналу з'єднаний з першим входом автокомпенсатора, виходи компенсаційних антен з'єднані з відповідними входами приймача компенсаційного каналу, а вихід приймача компенсаційного каналу з'єднаний з другим входом автокомпенсатора, вихід автокомпенсатора з'єднаний із пристроєм первинної обробки, другий вихід приймача основного каналу з'єднаний із входом пристрою первинної обробки, перший вихід пристрою первинної обробки з'єднаний з входом пристрою відображення, управління і контролю, другий вихід пристрою первинної обробки з'єднаний з входом пристрою вторинної обробки і спряження, а перший вхід-вихід пристрою відображення, управління і контролю з'єднаний з входом-виходом пристрою вторинної обробки і спряження, вихід якого є виходом РЛС, яка відрізняється тим, що в неї додатково введені пристрій управління вихідною потужністю, асинхронний електродвигун з частотним перетворювачем та пристрій управління антеною, причому перший вхід пристрою управління вихідною потужністю з'єднаний з виходом формувача зондуючих сигналів, другий вхід пристрою управління вихідною потужністю з'єднаний з виходом пристрою відображення, управління і контролю, а вихід пристрою управління вихідною потужністю з'єднаний із входом твердотільного передавача, другий вхід-вихід пристрою відображення, управління і контролю з'єднаний з першим входом-виходом пристрою управління антеною, другий вхід-вихід пристрою управління антеною з'єднаний з першим входом-виходом асинхронного двигуна з частотним перетворювачем, другий вхід-вихід асинхронного двигуна з частотним перетворювачем з'єднаний з входом-виходом основної антени, а всі зовнішні металеві поверхні РЛС, крім вібраторів антени, захищені покриттям, що поглинає енергію електромагнітних коливань сантиметрового та міліметрового діапазонів.
2. Рухлива наземна двокоординатна радіолокаційна станція (РЛС) кругового огляду метрового діапазону за п. 1, яка відрізняється тим, що вихід автокомпенсатора з'єднаний із пристроєм первинної обробки через з'єднання з другим входом приймача основного каналу.
3. Рухлива наземна двокоординатна радіолокаційна станція (РЛС) кругового огляду метрового діапазону за будь-яким з пп. 1-2, яка відрізняється тим, що містить чотири компенсаційні антени.
Текст
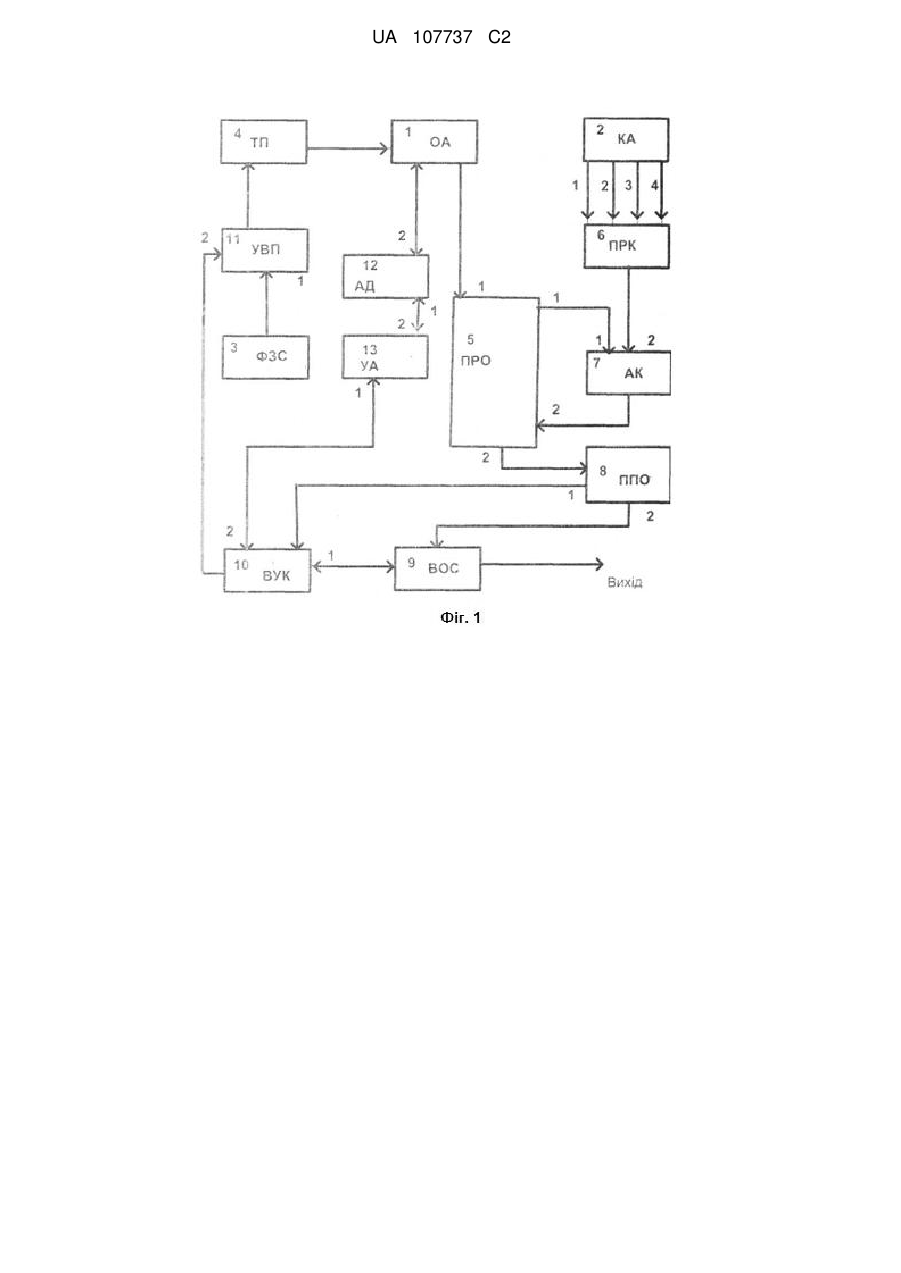
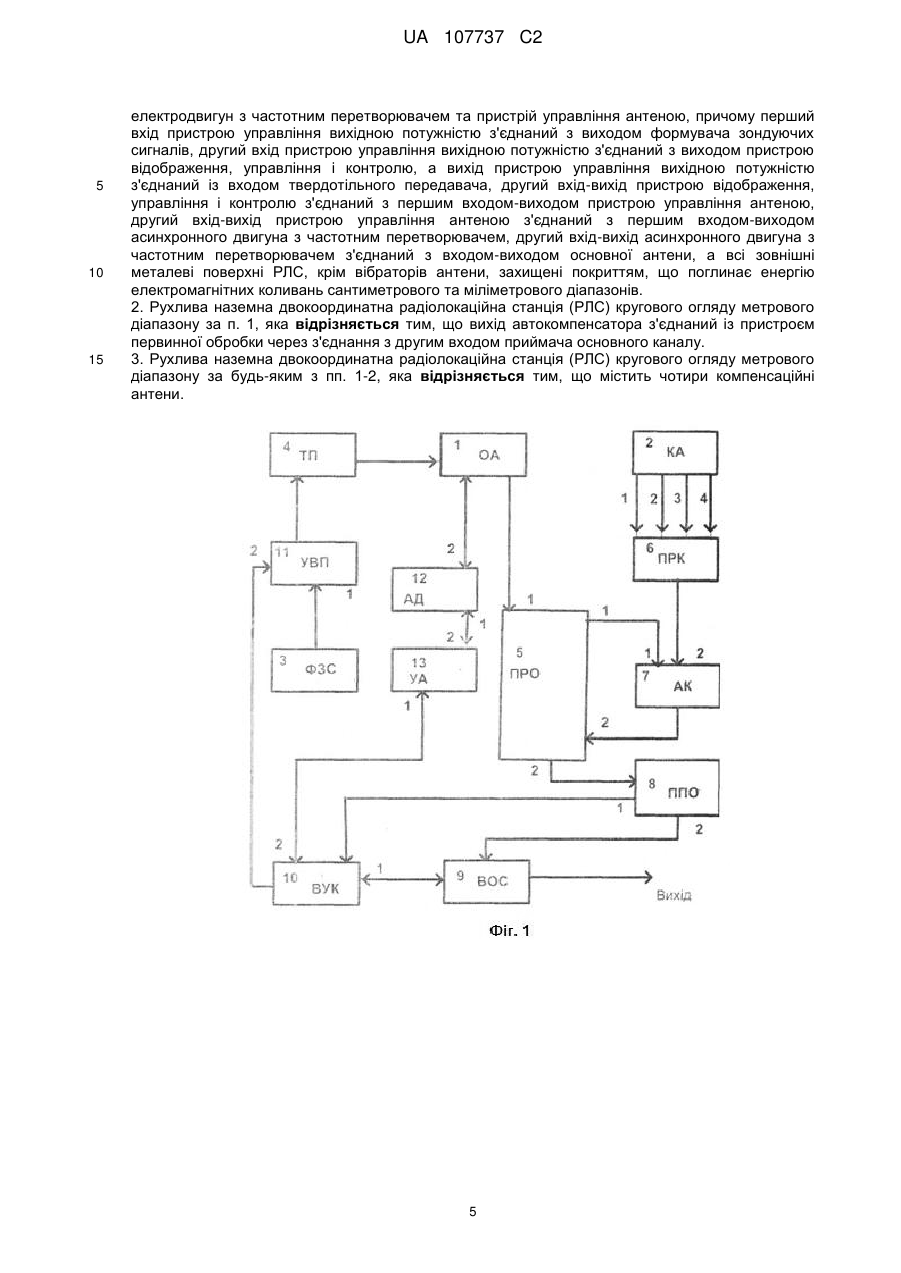
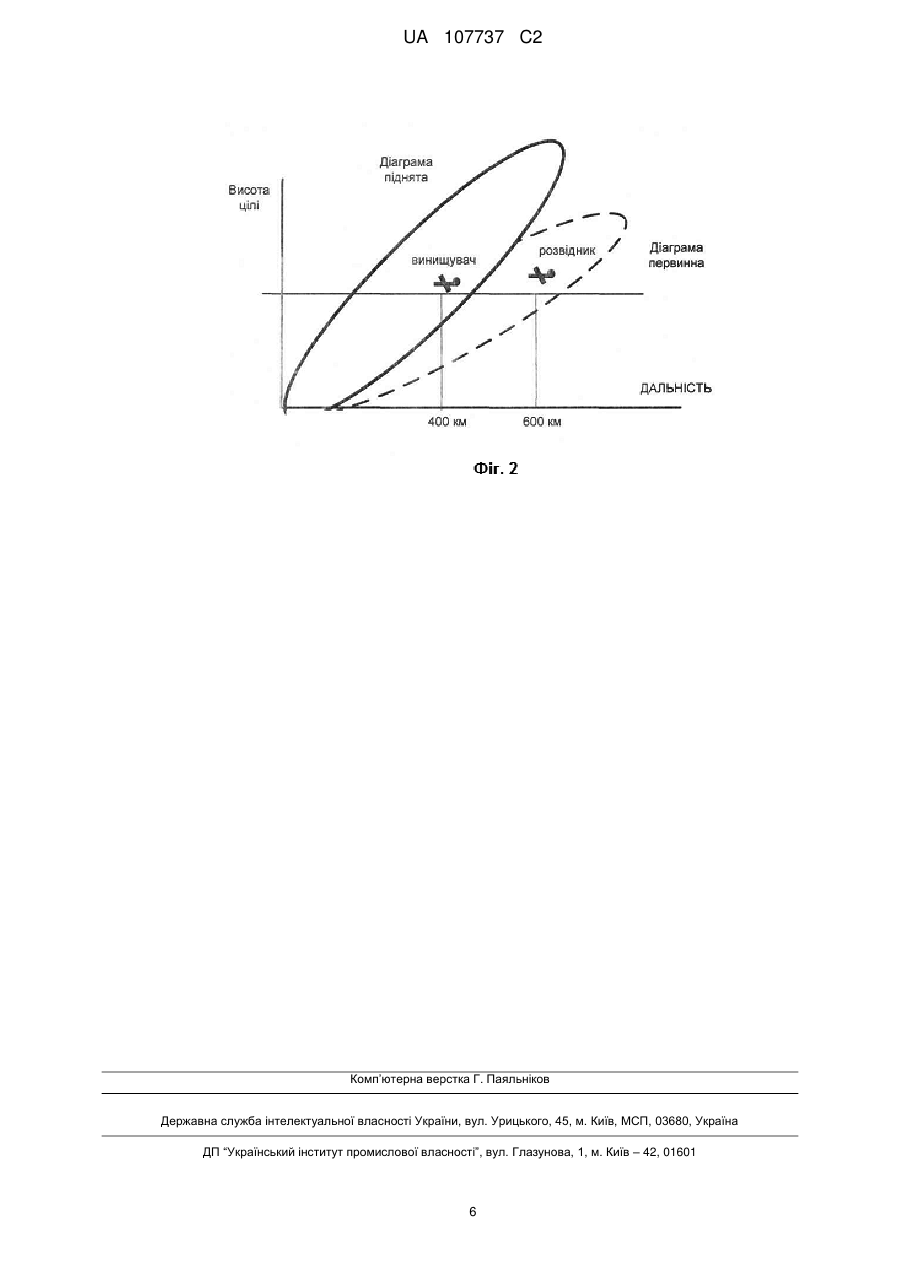
Реферат: Винахід належить до галузі радіолокації. Рухлива наземна двокоординатна радіолокаційна станція кругового огляду метрового діапазону містить основну і компенсаційні антени, формувач зондуючих сигналів, твердотільний передавач, приймачі основного і компенсаційного каналів, автокомпенсатор, пристрій первинної обробки, пристрій вторинної обробки і спряження та пристрій відображення, управління і контролю. Додатково введені пристрій управління вихідною потужністю, асинхронний електродвигун з частотним перетворювачем та пристрій управління антеною. Всі зовнішні металеві поверхні РЛС, крім вібраторів антени, захищені покриттям, що поглинає енергію електромагнітних коливань сантиметрового та міліметрового діапазонів. Винахід дозволяє підвищити скритність РЛС, а також мінімізувати шкідливе опромінювання для людей, що знаходяться в межах її робочої зони. UA 107737 C2 (12) UA 107737 C2 UA 107737 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до радіолокації і може бути використаний в радіолокаційних станціях (РЛС) управління повітряним, наземним та морським рухом і контролю повітряного, наземного та морського простору для виявлення, виміру площинних координат і розпізнавання повітряних, наземних та морських об'єктів, а також при модернізації РЛС метрового діапазону. РЛС метрового діапазону є одним із найважливіших видів озброєння багатьох сучасних країн і широко застосовуються під час ведення бойових дій у місцях воєнних конфліктів, наприклад, в Іраку, Лівії, Перській затоці. Переважно РЛС метрового діапазону призначені для виявлення повітряних об'єктів, а отже, є одними з основних цілей противника. Тому важливим аспектом вдосконалення сучасних РЛС метрового діапазону стає підвищення їх скритності для повітряних об'єктів противника. Відома РЛС [Радиолокационная станция. Патент РФ № 2124221 МПК G01S 13/42, 13/00, з. № 98102332/09 від 11.02.1998.], в якій технічною перевагою в порівнянні з прототипом є підвищення скритності при збереженні або збільшенні дальності виявлення цілі шляхом застосування стиснення на відеочастоті в квадратурних каналах, врахування власної швидкості носія РЛС і швидкостей виявлених цілей завдяки компенсації відповідних доплерівських зсувів частоти, регулювання потужності зондуючих сигналів у залежності від відношення сигнал/шум і, нарешті, переходу в пасивний режим для виявлення цілей, що є джерелами радіовипромінювань. У патенті не зазначений частотний діапазон цієї РЛС, але якщо її реалізувати як рухливу наземну РЛС кругового огляду метрового діапазону, то вона має наступні недоліки. У пасивному режимі роботи така РЛС не здатна виявити випромінювання радарів сантиметрового і міліметрового діапазонів хвиль, у той же час РЛС є видимою для літакових та ракетних радарів, навіть у вимкненому стані. При цьому при сучасному рівні техніки мінімізація тривалості зондуючих сигналів практично не впливає на можливість літака-розвідника виявити РЛС. У цій РЛС зміна рівня потужності не залежить від значення азимуту, а також в ній неможливо програмно змінювати кут нахилу антени в залежності від значення азимуту, що позбавляє її можливості підвищити свою скритність. Відомі також РЛС метрового діапазону аналогічного призначення з заявленою РЛС [Подвижная РЛС П-18. Москва: Воениздат МО СССР, 1978.3. Оружие России 2004. М.: Военный парад, 2004, РЛС 1Л13, стр. 673.]. Такі РЛС є видимими для літакових і ракетних радарів сантиметрового і міліметрового діапазону хвиль навіть у вимкненому режимі. В них відсутня скритність при не регульованому як функція від азимуту випромінюванні своїх зондуючих сигналів. Також ці РЛС є джерелом шкідливого опромінення, що впливає на людей, що знаходяться в будь-якому місці її робочої зони. Найбільш близькою за технічною суттю і призначенням до пропонованої РЛС є РЛС кругового огляду метрового діапазону [Подвижная наземная двухкоординатная РЛС кругового обзора метрового диапазона волн. Пат. RU 2256190, МПК GO IS 7/00, 13/00, з. № 2003121688/09 від 14.07.2003.], прийнята за прототип. РЛС-прототип містить основну антену (ОА), компенсаційні антени (КА), формувач зондуючих сигналів (ФЗС), твердотільний передавач (ТП), приймач основного каналу (ПРО), приймач компенсаційного каналу (ПРК), автокомпенсатор (АК), пристрій первинної обробки (ППО), пристрій вторинної обробки і спряження (ВОС), пристрій відображення, управління і контролю (ВУК), що зв'язані між собою відповідними зв'язками. Недоліками прототипу є: відсутність скритності при нерегульованому як функція від азимуту випромінюванні своїх зондувальних сигналів; відсутність скритності для літакових і ракетних радарів сантиметрового і міліметрового діапазону хвиль, навіть у вимкненому режимі; наявність шкідливого опромінення, що впливає на людей, що знаходяться в будь-якому місці її робочої зони. Задачею запропонованого винаходу є вдосконалення РЛС метрового діапазону шляхом оснащення РЛС додатковими пристроями управління вихідною потужністю РЛС, управління антеною та асинхронним двигуном з частотним перетворювачем, а також шляхом захисту усіх зовнішніх металевих поверхонь РЛС, крім вібраторів антени, покриттям, що поглинає енергію електромагнітних коливань сантиметрового та міліметрового діапазонів (поглинаюче покриття), що дозволить підвищити скритність РЛС як у вимкненому режимі, так і під час роботи, для будьяких повітряних об'єктів противника, що мають функцію радіолокації сантиметрового та міліметрового діапазонів, а також мінімізувати шкідливе опромінювання для людей, що знаходяться в межах її робочої зони. 1 UA 107737 C2 5 10 15 20 25 30 35 40 45 50 55 60 Суть винаходу полягає в тому, що у відому рухливу наземну двокоординатну радіолокаційну станцію (РЛС) кругового огляду метрового діапазону, що містить основну і компенсаційні антени, формувач зондуючих сигналів, твердотільний передавач, приймачі основного і компенсаційного каналів, автокомпенсатор, пристрій первинної обробки, пристрій вторинної обробки і спряження та пристрій відображення, управління і контролю, причому вихід твердотільного передавача з'єднаний із входом основної антени, вихід основної антени з'єднаний із першим входом приймача основного каналу, перший вихід приймача основного каналу з'єднаний з першим входом автокомпенсатора, виходи компенсаційних антен з'єднані з відповідними входами приймача компенсаційного каналу, а вихід приймача компенсаційного каналу з'єднаний з другим входом автокомпенсатора, вихід автокомпенсатора з'єднаний із пристроєм первинної обробки, другий вихід приймача основного каналу з'єднаний із входом пристрою первинної обробки, перший вихід пристрою первинної обробки з'єднаний з входом пристрою відображення, управління і контролю, другий вихід пристрою первинної обробки з'єднаний з входом пристрою вторинної обробки і спряження, а перший вхід-вихід пристрою відображення, управління і контролю з'єднаний з входом-виходом пристрою вторинної обробки і спряження, вихід якого є виходом РЛС, згідно з винаходом, додатково введені пристрій управління вихідною потужністю, асинхронний електродвигун з частотним перетворювачем та пристрій управління антеною, причому перший вхід пристрою управління вихідною потужністю з'єднаний з виходом формувача зондуючих сигналів, другий вхід пристрою управління вихідною потужністю з'єднаний з виходом пристрою відображення, управління і контролю, а вихід пристрою управління вихідною потужністю з'єднаний із входом твердотільного передавача, другий вхід-вихід пристрою відображення, управління і контролю з'єднаний з першим входомвиходом пристрою управління антеною, другий вхід-вихід пристрою управління антеною з'єднаний з першим входом-виходом асинхронного двигуна з частотним перетворювачем, другий вхід-вихід асинхронного двигуна з частотним перетворювачем з'єднаний з входомвиходом основної антени, а всі зовнішні металеві поверхні РЛС, крім вібраторів антени, захищені покриттям, що поглинає енергію електромагнітних коливань сантиметрового та міліметрового діапазонів. Введення пристрою управління вихідною потужністю дозволяє програмувати потужність зондуючого сигналу, що надходить на твердотільний передавач, в залежності від поточного азимуту, а отже, дозволяє змінювати рівень потужності передавача в певному секторі при кожному оберті антени. Завдяки пристрою управління антеною та асинхронному двигуну можливо змінювати нахил антени в залежності від поточного азимуту, тобто у визначеному секторі нахил антени змінюється при кожному її оберті. Керування потужністю та нахилом антени дозволяє обмежити випромінювання РЛС лише у напрямі виявленого повітряного об'єкта противника, що реєструє сигнали в метровому діапазоні хвиль (наприклад, літака-розвідника), продовжуючи при цьому приймати сигнали у всіх інших напрямах. Крім того, ця ж функція дозволяє обмежити шкідливе випромінювання і в напрямках, де знаходяться люди (наприклад, обслуговуючий персонал РЛС, воєнні підрозділи, мирне населення і т.д.). Поглинаюче покриття робить РЛС невидимою для об'єктів, що здатні фіксувати сигнали у сантиметрових та міліметрових діапазонах (наприклад, бойові літаки, ракети із функцією самонаведення). Таким чином, сукупність суттєвих ознак винаходу дозволить підвищити скритність РЛС як у вимкненому режимі, так і під час її роботи, для об'єктів, що реєструють сигнали не тільки міліметрового та сантиметрового, але й метрового діапазону хвиль, а також дозволить мінімізувати шкідливе опромінювання для людей, що знаходяться в межах її робочої зони. Переважним варіантом виконання з'єднання автокомпенсатора з пристроєм первинної обробки є з'єднання через другий вхід приймача основного каналу, а саме: вихід автокомпенсатора з'єднаний з другим входом приймача основного каналу, другий вихід якого з'єднаний з першим входом пристрою первинної обробки. Таке з'єднання дозволяє отримати більш зручну з точки зору механіки конструкцію, порівняно з прототипом, спрощує пристрій первинної обробки та оптимізує шлях проходження прийнятих ехосигналів, що збільшує надійність РЛС. Переважним варіантом виконання РЛС, що заявляється, є РЛС, що містить чотири компенсаційні антени. Це дозволяє компенсувати одночасно кілька джерел шумових перешкод з усіх напрямків. Суть винаходу пояснюється наступними кресленнями: Фіг. 1 - структурна схема з переважними варіантами виконання РЛС; 2 UA 107737 C2 5 10 15 20 25 30 35 40 45 50 55 Фіг. 2 - ілюстрація прикладу 4 використання РЛС. РЛС, що заявляється (Фіг. 1) містить основну антену (ОА) 1, компенсаційні антени (КА) 2, формувач зондуючих сигналів (ФЗС) 3, твердотільний передавач (ТП) 4, приймач основного каналу (ПРО) 5, приймач компенсаційного каналу (ПРК) 6, автокомпенсатор (АК) 7, пристрій первинної обробки (ППО) 8, пристрій вторинної обробки і спряження (ВОС) 9, пристрій відображення, управління і контролю (ВУК) 10, пристрій управління вихідною потужністю (УВП) 11, асинхронний двигун з частотним перетворювачем (АД) 12, пристрій управління антеною (УА) 13, в якій вихід ФЗС 3 з'єднаний з першим входом УВП 11, вихід УВП 11 з'єднаний із входом ТП 4, вихід ТП 4 з'єднаний із входом ОА 1, вихід ОА 1 з'єднаний зі першим входом ПРО 5, перший вихід ПРО 5 з'єднаний з першим входом АК 7, перший-четвертий виходи КА 2 з'єднані з відповідними входами ПРК 6, вихід ПРК 6 з'єднаний із другим входом АК 7, а вихід АК 7 з'єднаний із другим входом ПРО 5, другий вихід ПРО 5 з'єднаний з входом ППО 8, перший вихід ППО 8 з'єднаний з входом ВУК 10, вихід ВУК 10 з'єднаний з другим входом УВП 11, другий вхідвихід ВУК 10 з'єднаний з першим входом-виходом УА 13, другий вхід-вихід УА 13 з'єднаний з першим входом-виходом АД 12, другий вхід-вихід АД 12 з'єднаний з входом-виходом ОА 1, другий вихід ППО 8 з'єднаний з входом ВОС 9, а перший вхід-вихід ВУК 10 з'єднаний з входомвиходом ВОС 9, вихід якого є виходом РЛС, РЛС, що заявляється, працює наступним чином. Сформовані у ФЗС 3 радіоімпульси за допомогою УВП 11 змінюють потужність у певному секторі від мінімальної до максимальної в залежності від поточного азимуту, надходять на ТП 4 та випромінюються ОА 1 у простір. Нахил ОА 1 також змінюється в залежності від поточного азимуту за допомогою АД 12, стан якого змінюється УА 13. Таким чином, рівень потужності ТП 4 та нахил ОА 1 змінюється при кожному її обертанні. Алгоритми, за якими змінюється потужність зондуючого сигналу та нахил антени, реалізовані програмним способом на сигнальних процесорах і можуть оперативно корегуватися оператором. Відбиті від об'єкта ехосигнали через ОА 1 надходять у ПРО 5, де підсилюються і фільтруються. З першого виходу ПРО 5 сигнали надходять на перший вхід АК 7 і через другий вхід ПРО 5 - на вхід ППО 8. AK 7 також забезпечує захист РЛС від впливу активних шумових перешкод, що надходять з ОА 1 через ПРО 5. Для їх компенсації використовують сигнали, що надходять з виходів антен КА 2 через ПРК 6. Ці сигнали перекривають азимутальний шумовий фон ОА 1 з усіх напрямів, що дозволяє компенсувати одночасно кілька джерел перешкод. ППО 8 виявляє об'єкт та вимірює його координати та швидкість. Крім того, ППО 8 пеленгує джерела активних шумових перешкод. Ця первинна інформація потрапляє на обробку до ВОС 9 та для відображення у ВУК 10. ВОС 9 здійснює обробку інформації та видачу результатів обробки на ВУК 10. ВУК 10 відображає на екранах первинну та вторинну інформацію, відображає органи управління, передає команди для роботи УВП 11 та УА 13, здійснює управління режимами роботи РЛС, її системами, а також контроль функціонування РЛС при її включенні, безперервний контроль при її штатній роботі та автоматичний пошук несправностей. Покриття, що поглинає енергію електромагнітних коливань сантиметрового та міліметрового діапазонів, захищає РЛС від фіксації її місцезнаходження відповідними радарами. Таке покриття може бути виготовлене різними відомими з рівня техніки способами з використанням придатних для цього та відомих з рівня техніки матеріалів, зокрема, за технологіями "стеле". Як поглинаюче покриття можливо використовувати речовину (наприклад, лак) з домішками поглинаючих матеріалів (наприклад, шунгіту), що наносять безпосередньо на поверхню металевих частин РЛС, крім вібраторів антени. Під покриттям у даному випадку також розуміють інший об'єкт із нанесеною поглинаючою речовиною (плівку, сітку, тент, кожух та ін…), що може легко закривати зовнішні металеві поверхні РЛС, крім вібраторів антени, та зніматися у разі необхідності. Можливість одержання технічного результату винаходу, що заявляється, ілюструється наступними прикладами. Приклад 1. Під час ведення бойових дій РЛС реєструє бойовий літак противника і слідкує за його рухом. У той же час цей бойовий літак не здатний самостійно виявити на великій дальності РЛС, тому що не оснащений антеною і приймачем метрового діапазону, а його сантиметрові чи міліметрові радари не бачать на середніх і великих дальностях РЛС, захищену поглинаючим покриттям. Отже, РЛС залишається невидимою для бойових літаків, оснащених сантиметровими та міліметровими радарами. 3 UA 107737 C2 5 10 15 20 25 30 35 40 Приклад 2. РЛС було виявлено на граничній дальності літак-розвідник (що має приймачі, які здатні реєструвати сигнали в метровому діапазоні хвиль) і бойовий літак (що має на борту лише сантиметрові та міліметрові радари) противника. Оператор РЛС вимикає випромінювання в азимутальному секторі, де знаходиться розвідник, але продовжує слідкувати за рухом бойового літака. Таким чином, РЛС стає невидимою як для літака-розвідника (який не бачить РЛС через відсутність випромінювання у його напрямку), так і для бойового літака (який не має на борту метрових радарів, а сантиметрові та міліметрові радари не здатні зафіксувати місцезнаходження РЛС через її поглинаюче покриття). Приклад 3. Літак-розвідник противника виявив РЛС до вимкнення нею випромінювання і передав цю інформацію бойовому літаку. Але початкові координати, зафіксовані метровим радаром літака-розвідника, не є достатніми для знищення РЛС, а сантиметрові і міліметрові радари бойового літака не здатні виявити РЛС через поглинаюче покриття. Наприклад, метровий радар літака-розвідника може мати точність визначення азимуту 0,8 градусу. Тоді, на дальності порядку 500-600 кілометрів (стратегічні розвідники знаходяться звичайно на такій відстані від місця оборони противника) помилка зміщення РЛС в сторону від визначеного розвідником напрямку може скласти близько 8 кілометрів. Приклад 4 (Фіг. 2). Розвідка повідомляє оператору РЛС, що в азимутальному секторі "А" на дальності 600 км з'явився літак-розвідник, який має можливість пеленгувати джерела випромінювання метрового діапазону. Оператор програмно змінює кут нахилу антени в азимутальному секторі "А" таким чином, що діаграма спрямованості антени піднімається вгору так, щоб нижній край діаграми був вище положення літака-розвідника (на дальності 600 км), але опромінював усі більш близькі цілі, що можуть бути бойовими літаками. В той же час ці літаки не можуть виявляти випромінювання РЛС, тому що не мають антен метрового діапазону, а їхні сантиметрові та міліметрові радари на великій відстані не бачать РЛС, захищену поглинаючим покриттям. Приклад 5. РЛС встановлена недалеко від держкордону. В програми електроннообчислювальної машини (ЕОМ) записані азимути, що перетинають кордон, і дальності до кордону в точках цих перетинів. Вихідна потужність передавача програмно плавно змінюється таким чином, щоб РЛС могла практично не опромінювати об'єкти над територією чужої країни. Таким чином, можливість оперативної плавної зміни вихідної потужності передавача та зміни нахилу і швидкості обертання антени рухливої наземної двокоординатної радіолокаційної станції кругового огляду метрового діапазону дозволяє заявленій РЛС залишатися невидимою для об'єктів, оснащених радарами метрового діапазону, та продовжувати стеження за об'єктами із сантиметровими та міліметровими радарами, які не здатні виявити РЛС завдяки наявності поглинаючого покриття. Користуючись відомостями, представленими в матеріалах заявки, пропоновану РЛС можна виготовити на виробництві, використовуючи відомі матеріали, елементи, вузли і технології, і застосовувати її для виявлення повітряних, наземних та морськихцілей і виміру їх координат, що доводить промислову придатність винаходу. Відповідно до матеріалів заявки був виготовлений дослідний зразок пристрою, випробування якого підтвердили досягнення зазначеного в заявці технічного результату. ФОРМУЛА ВИНАХОДУ 45 50 55 60 1. Рухлива наземна двокоординатна радіолокаційна станція (РЛС) кругового огляду метрового діапазону, що містить основну і компенсаційні антени, формувач зондуючих сигналів, твердотільний передавач, приймачі основного і компенсаційного каналів, автокомпенсатор, пристрій первинної обробки, пристрій вторинної обробки і спряження та пристрій відображення, управління і контролю, причому вихід твердотільного передавача з'єднаний із входом основної антени, вихід основної антени з'єднаний із першим входом приймача основного каналу, перший вихід приймача основного каналу з'єднаний з першим входом автокомпенсатора, виходи компенсаційних антен з'єднані з відповідними входами приймача компенсаційного каналу, а вихід приймача компенсаційного каналу з'єднаний з другим входом автокомпенсатора, вихід автокомпенсатора з'єднаний із пристроєм первинної обробки, другий вихід приймача основного каналу з'єднаний із входом пристрою первинної обробки, перший вихід пристрою первинної обробки з'єднаний з входом пристрою відображення, управління і контролю, другий вихід пристрою первинної обробки з'єднаний з входом пристрою вторинної обробки і спряження, а перший вхід-вихід пристрою відображення, управління і контролю з'єднаний з входом-виходом пристрою вторинної обробки і спряження, вихід якого є виходом РЛС, яка відрізняється тим, що в неї додатково введені пристрій управління вихідною потужністю, асинхронний 4 UA 107737 C2 5 10 15 електродвигун з частотним перетворювачем та пристрій управління антеною, причому перший вхід пристрою управління вихідною потужністю з'єднаний з виходом формувача зондуючих сигналів, другий вхід пристрою управління вихідною потужністю з'єднаний з виходом пристрою відображення, управління і контролю, а вихід пристрою управління вихідною потужністю з'єднаний із входом твердотільного передавача, другий вхід-вихід пристрою відображення, управління і контролю з'єднаний з першим входом-виходом пристрою управління антеною, другий вхід-вихід пристрою управління антеною з'єднаний з першим входом-виходом асинхронного двигуна з частотним перетворювачем, другий вхід-вихід асинхронного двигуна з частотним перетворювачем з'єднаний з входом-виходом основної антени, а всі зовнішні металеві поверхні РЛС, крім вібраторів антени, захищені покриттям, що поглинає енергію електромагнітних коливань сантиметрового та міліметрового діапазонів. 2. Рухлива наземна двокоординатна радіолокаційна станція (РЛС) кругового огляду метрового діапазону за п. 1, яка відрізняється тим, що вихід автокомпенсатора з'єднаний із пристроєм первинної обробки через з'єднання з другим входом приймача основного каналу. 3. Рухлива наземна двокоординатна радіолокаційна станція (РЛС) кругового огляду метрового діапазону за будь-яким з пп. 1-2, яка відрізняється тим, що містить чотири компенсаційні антени. 5 UA 107737 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюYefremov Yurii Heorhiiovych
Автори російськоюЕфремов Юрий Георгиевич
МПК / Мітки
МПК: G01S 13/00, G01S 7/00
Мітки: огляду, радіолокаційна, станція, наземна, двокоординатна, кругового, метрового, рухлива, діапазону
Код посилання
<a href="https://ua.patents.su/8-107737-rukhliva-nazemna-dvokoordinatna-radiolokacijjna-stanciya-krugovogo-oglyadu-metrovogo-diapazonu.html" target="_blank" rel="follow" title="База патентів України">Рухлива наземна двокоординатна радіолокаційна станція кругового огляду метрового діапазону</a>
Рухома наземна двокоординатна радіолокаційна станція кругового огляду метрового діапазону хвиль

Номер патенту: 10906
Опубліковано: 15.12.2005
Автори: Колдоркіна Наталья Романовна, Москалєнко Сєргєй Валєрьєвіч, Бомштейн Алєксандр Давідовіч, Харітонов Сєргєй Алєксандровіч, Коган Сємьон Міхайловіч
МПК: G01S 13/00, G01S 7/00
Мітки: метрового, наземна, діапазону, станція, огляду, хвиль, кругового, двокоординатна, радіолокаційна, рухома
Формула / Реферат:
1. Рухома наземна двокоординатна радіолокаційна станція (РЛС) кругового огляду метрового діапазону хвиль, що містить послідовно з'єднані формувач зондувальних сигналів, передавальний пристрій, основну антену з датчиком азимуту та приймальний пристрій основного каналу, а також послідовно з'єднані пристрій первинної обробки (ППО), пристрій відображення, керування і контролю (ПКК) і пристрій сполучення, яка відрізняється тим, що до неї введені...
Радіолокатор кругового огляду
Номер патенту: 32196
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
МПК: G01S 17/00
Мітки: радіолокатор, кругового, огляду
Текст:
...діаграма спрямування передавальної антени в горизонтальній площині. До складу запропонованого пристрою на фіг. 1 входять такі основні елементи: перший приймальний вібратор 1, що приймає луна-сигнали цілей з передньої напівсфери; другий приймальний вібратор 2, який приймає луна-сигнали цілей з задньої напівсфери; плоский металевий рефлектор 3 приймальної антени; перший 4 і другий 5 приймачі, пов'язані відповідно з першим і другим вібраторами...
Радіолокаційна станція
Номер патенту: 42179
Опубліковано: 15.10.2004
Автори: Немчин Олександр Федорович, Піза Дмитро Макарович, Мокеєв Юрій Геннадійович
МПК: G01S 13/42, G01S 7/36, G01S 13/00
Мітки: станція, радіолокаційна
Формула / Реферат:
Радіолокаційна станція, що містить дуально-поляризовану гостроспрямовану антену і всеспрямовану антену, з`єднані з відповідними каналами приймання, пристрої компенсації завад та обробки сигналів і індикатор, яка відрізняється тим, що станція додатково містить перший та другий порогові елементи, пеленгаційний пристрій, пристрій синхронізації, тривходову схему І, тригер, комутатори каналів та двоканальний комутатор, керівний вхід якого...
Двосигнальний пеленгатор на індикаторі кругового огляду
Номер патенту: 35826
Опубліковано: 16.04.2001
Автори: КУБРАК ОЛЕКСАНДР МИКОЛАЙОВИЧ, Вагапов Арслан Мінгазович, Приймачук Олег Віталійович
МПК: G01S 3/00
Мітки: пеленгатор, кругового, двосигнальний, огляду, індикаторі
Формула / Реферат:
Двосигнальний пеленгатор на індикаторі кругового огляду, який містить антенну решітку (АР), кожен n-ий вихід елементів якої (n=l,2,...,N, N=2і, і=1,2, і т.д.) з'єднаний з відповідними входами перетворювача Адамара (ПА), який містить HxZ елементів сумарно-різницевої обробки (ЕС-РО) (H=N/2, Z=log2N) та має N входів і N виходів, кожен n-ний вихід якого з'єднаний з послідовно ввімкненими лінійним трактом аналогових приймальних модулів (ЛТАПМ) та...
Радіолокаційна станція комплексної системи захисту корабля
Номер патенту: 83795
Опубліковано: 25.09.2013
Автори: Ліпатов Валерій Павлович, Гузь Володимир Іванович, Стецюк Володимир Леонтійович, Піронер Ян Михайлович, Долеско Анатолій Олександрович
МПК: G01S 13/04
Мітки: корабля, радіолокаційна, станція, комплексної, системі, захисту
Формула / Реферат:
Радіолокаційна станція комплексної системи захисту корабля, що містить антенний пост з антеною, пульт оператора та розподільний щит, при цьому до складу антенного поста входять антенна система, передавач, надвисокочастотний приймач, підсилювач проміжної частоти та модуль процесорів, до складу пульта оператора входять панельний комп'ютер пульта оператора, що містить з'єднані між собою монітор пульта оператора РЛС та процесор керування і...
Попередній патент: Курильний виріб, який має властивості зниженої здатності до підпалювання, та паперова обгортка для курильного виробу
Наступний патент: Верстатний шпиндель з гасінням віброколивань
Випадковий патент: Пристрій для обслуговування дверей і рам коксових печей