Спосіб керування асинхронним двигуном
Формула / Реферат
Спосіб керування асинхронним двигуном, що включає регулювання вхідної напруги та частоти асинхронного двигуна за допомогою перетворювача частот, який відрізняється тим, що керування здійснюють по заданому значенню частоти обертання шляхом одночасної зміни частоти і діючого значення напруги перетворювача частот, для чого формують моментальні сигнали фаз і форму сигналів керування силового модуля, а також розраховують діюче значення вихідної напруги з урахуванням сталості U/f=const, при цьому за умови заданих частоти і рівня діючої напруги перетворювача частот використовують сформований генератором лінійно-частотно-модульований сигнал, що враховує поточне значення фази, при цьому порівнюють поточне значення вказаного сигналу з попереднім значенням і, в разі їх невідповідності, формують сигнал запису нових значень сигналу у регістр зсуву, за допомогою якого реалізують режим збереження попереднього значення фази в момент перемикання роботи генератора лінійно-частотно-модульованого сигналу, а також формують поточне значення напруги живлення асинхронного двигуна шляхом порівняння попереднього значення напруги і максимально можливого з урахуванням поточної фази та режиму роботи генератора лінійно-частотно-модульованого сигналу, на основі чого формують широтно-імпульсно-модульовані сигнали, за допомогою автоматичного регулювання скважності яких відповідно до заданого алгоритму керування асинхронним двигуном формують величину сталості U/f=const.
Текст
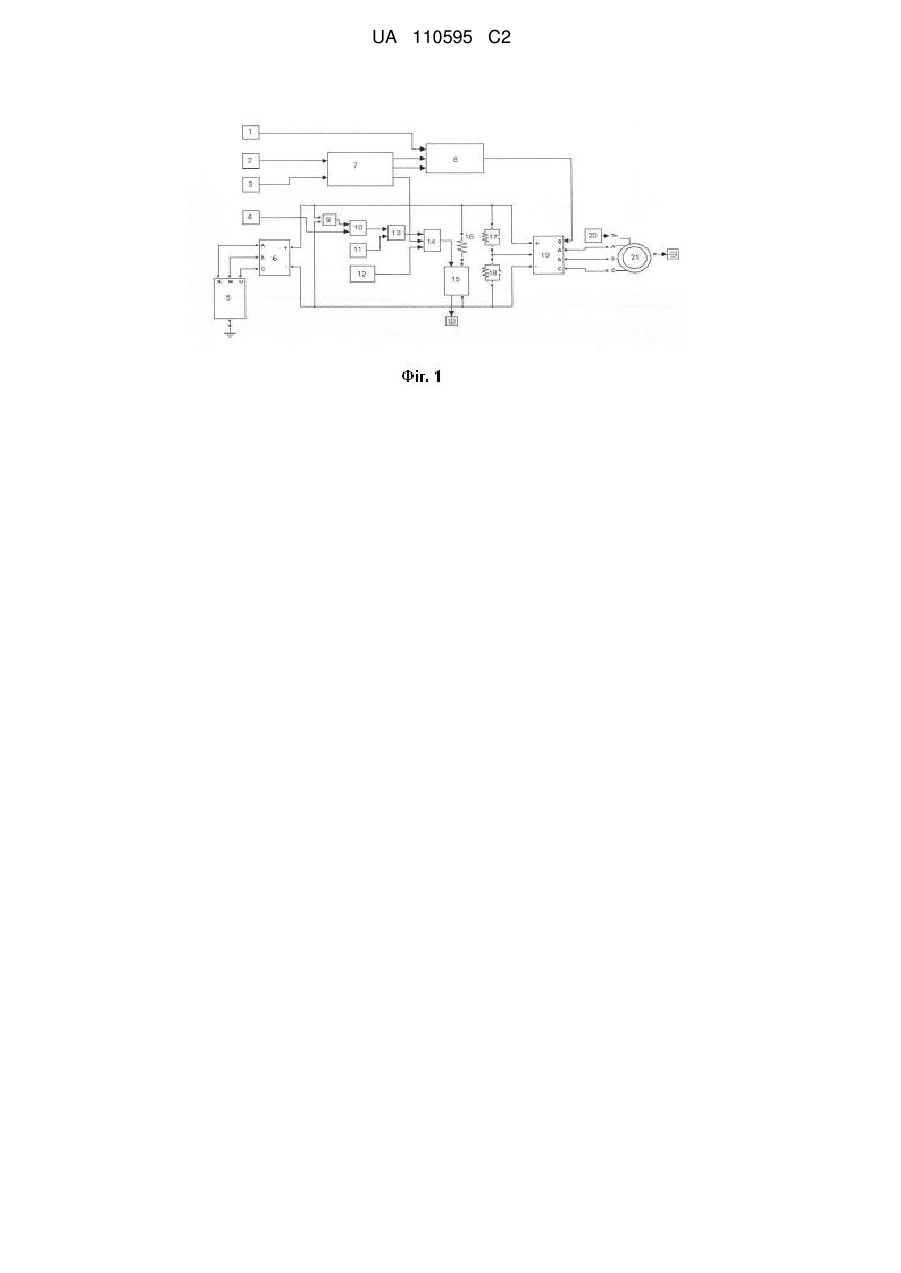
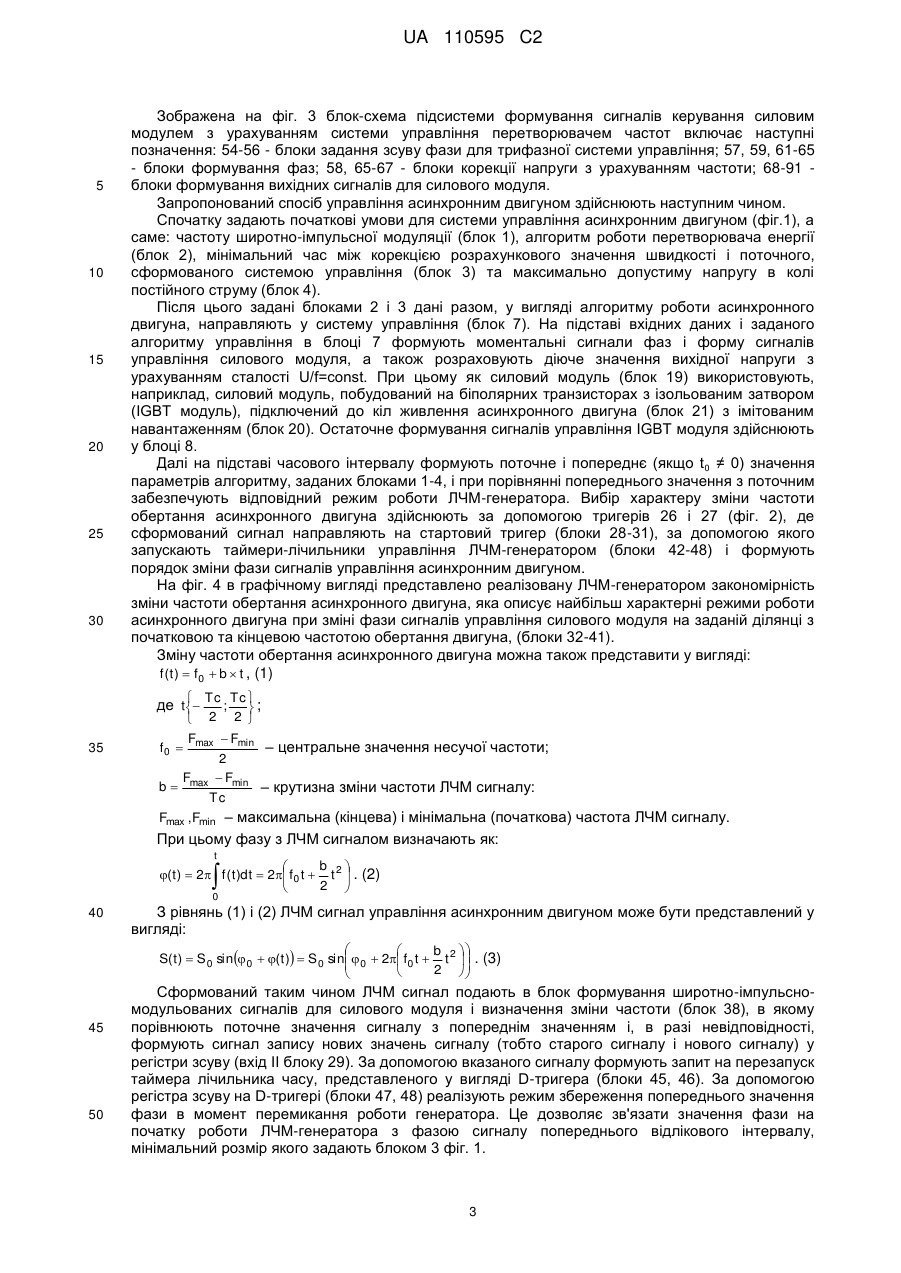
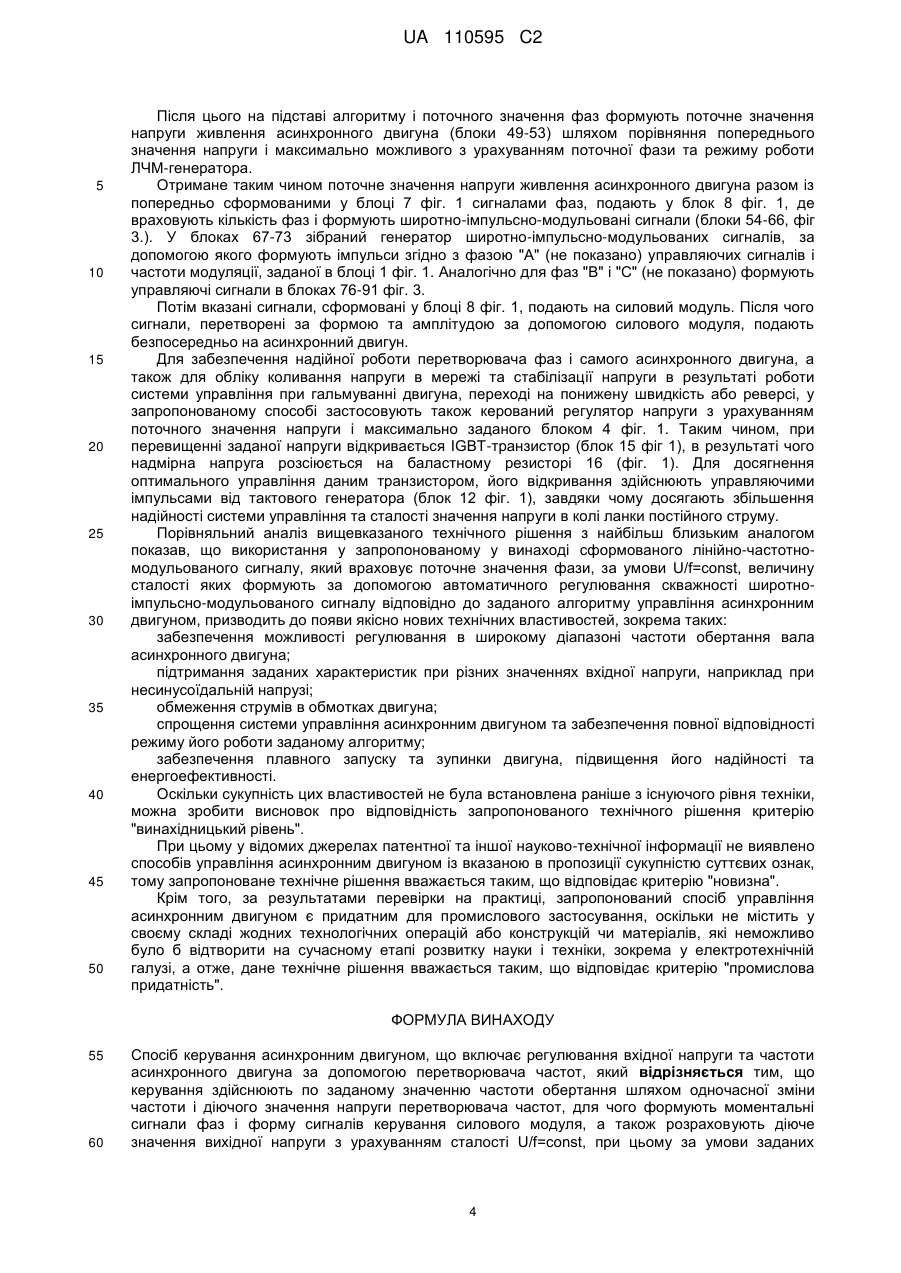
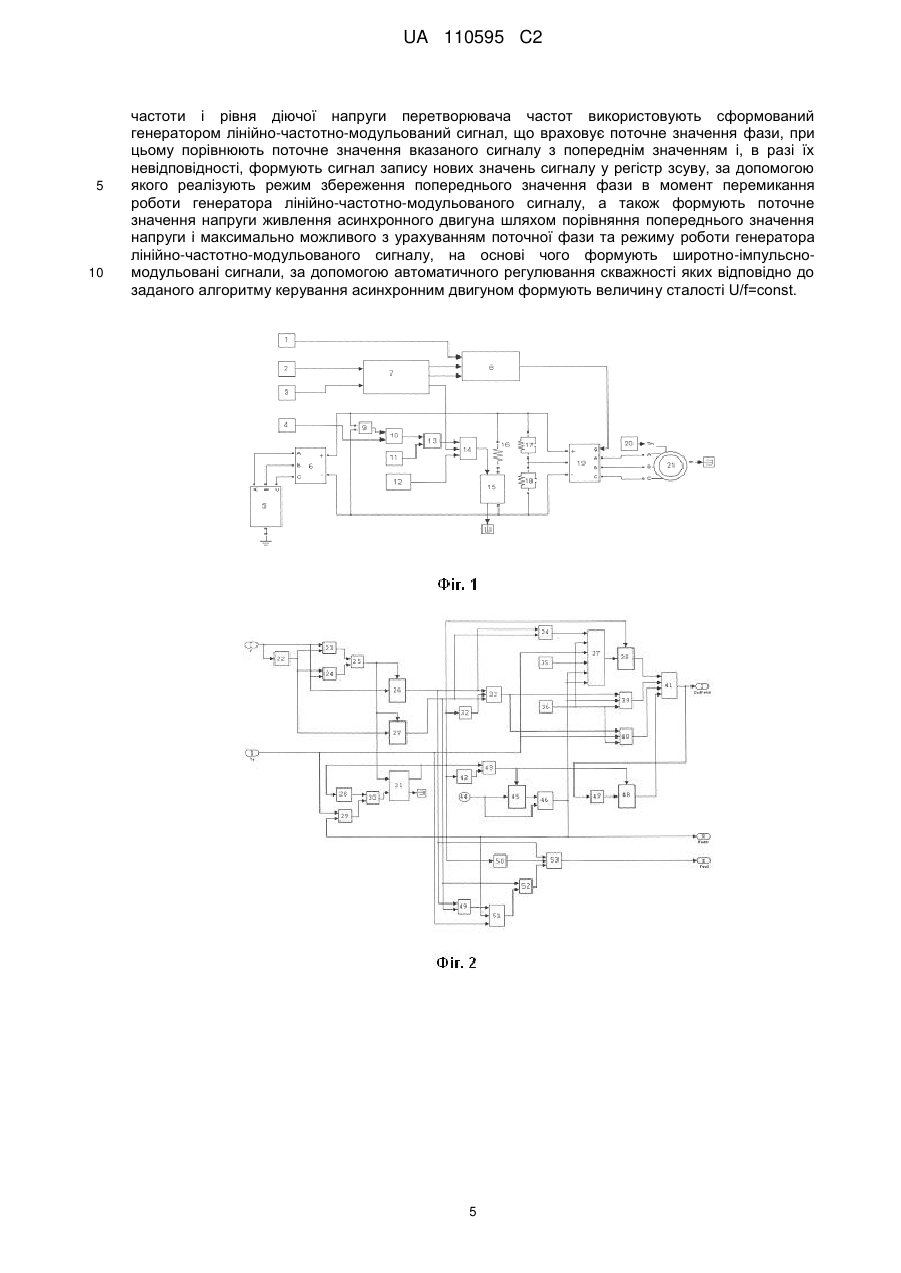
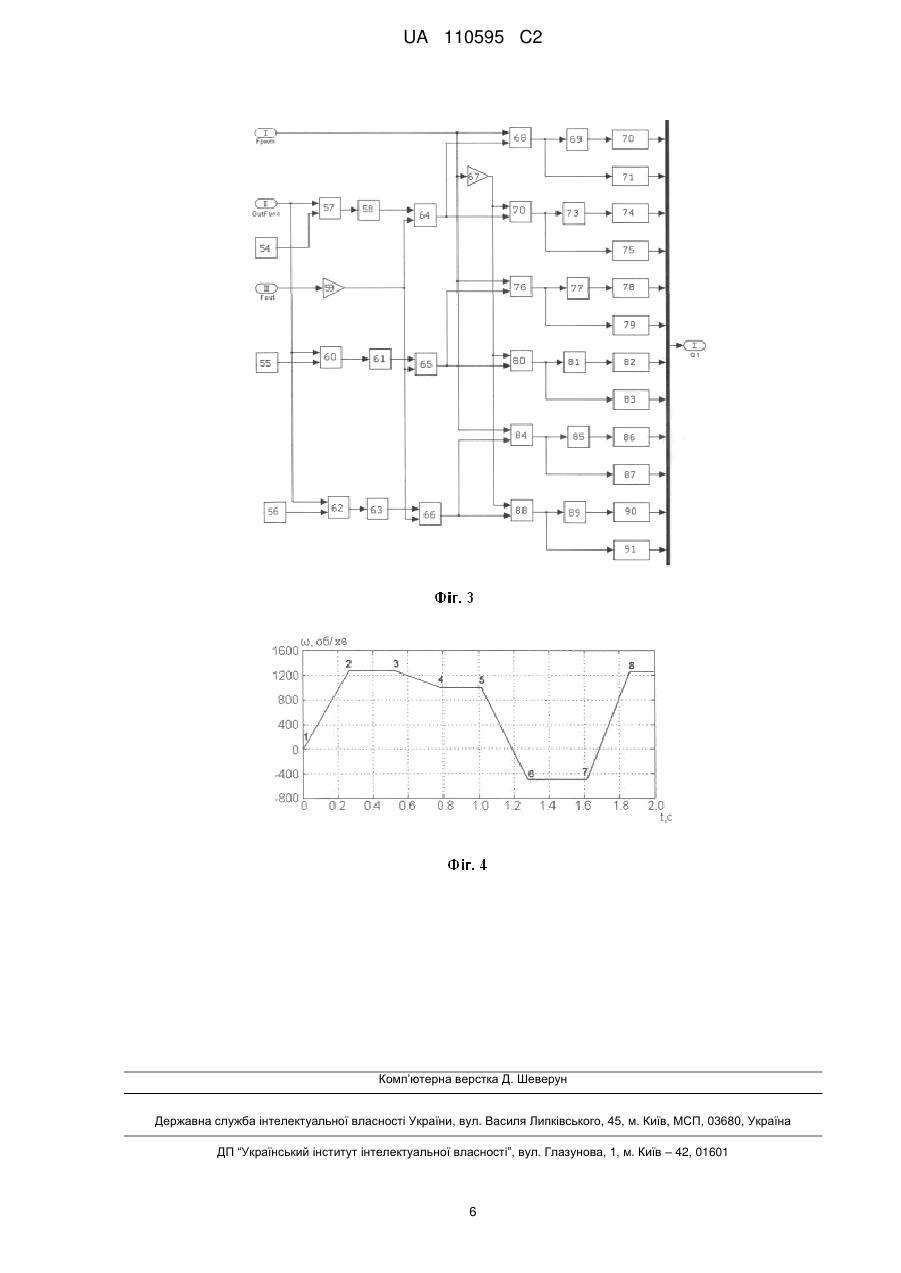
Реферат: Використання: в галузі електротехніки для управління асинхронними двигунами. Суть: спосіб полягає у регулюванні вхідної напруги та частоти асинхронного двигуна за допомогою перетворювача частот. Управління здійснюють по заданому значенню частоти обертання шляхом одночасної зміни частоти і діючого значення напруги перетворювача. Формують моментальні сигнали фаз і форму сигналів управління силового модуля, розраховують діюче значення вихідної напруги з урахуванням сталості U/f=const. При заданих частоті і рівні діючої напруги перетворювача частот використовують сформований лінійночастотно-модульований сигнал, що враховує поточне значення фази. Порівнюють поточне значення вказаного сигналу з попереднім значенням і, в разі їх невідповідності, формують сигнал запису нових значень сигналу у регістр зсуву. За допомогою нього реалізують режим збереження попереднього значення фази в момент перемикання роботи генератора лінійночастотно-модульованого сигналу. Формують поточне значення напруги живлення асинхронного двигуна шляхом порівняння попереднього значення напруги і максимально можливого з урахуванням поточної фази та режиму роботи генератора. Формують широтно-імпульсномодульовані сигнали. За допомогою автоматичного регулювання скважності вказаних сигналів відповідно до заданого алгоритму управління асинхронним двигуном формують величину сталості U/f=const. Технічні переваги: регулювання в широкому діапазоні частоти обертання вала двигуна; підтримання заданих характеристик при різних значеннях вхідної напруги; обмеження струмів в обмотках; спрощення системи управління; забезпечення повної відповідності режиму його роботи заданому алгоритму; підвищення надійності та енергоефективності. UA 110595 C2 (12) UA 110595 C2 UA 110595 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі електротехніки, а саме стосується способів керування електричними двигунами із використанням перетворювальної техніки, та може бути використаний для частотно-фазового управління асинхронними двигунами у різних сферах промислового виробництва. З рівня техніки відомий спосіб плавного управління асинхронним електродвигуном з коротко замкнутим ротором, який полягає в тому, що трифазну напругу подають через три пари зустрічно-паралельно включених тиристорів на статорні обмотки асинхронного двигуна, а на керуючі входи тиристорів подають сигнали з системи імпульсно-фазового управління, синхронізованої по напрузі мережі, на вхід якої подають сигнал у вигляді напруги, еквівалентній куту відкривання тиристорів, значення якого у кожний момент часу задають заздалегідь, при цьому вимірюють миттєві та діючі значення напруг у мережі і струмів у статорних обмотках асинхронного двигуна і при відхиленні їх від заданих значень припиняють подачу сигналів управління на тиристори, причому виміряні діючі значення струму одної із фаз у кожний період мережі оцінюють на максимум і при досягненні максимуму запам'ятовують його, після чого знову вимірюють діюче значення струму у кожний період мережі і порівнюють його з максимальним значенням, при відхиленні від максимального значення на задану величину формують сигнал для повного відкривання тиристорів і підтримують його на період роботи асинхронного двигуна у номінальному режимі [див. патент Російської Федерації № 2256285 (С1) 7 з класу МПК Н02Р1/28, опублікований 10.07.2005 у Бюл. № 19]. Недоліком відомого способу є складність регулювання частоти обертання асинхронного двигуна, складність системи управління та необхідність обов'язкової синхронізації роботи системи управління з мережею живлення. Відомий також спосіб управління асинхронним двигуном, в якому по заданому значенню частоти обертання асинхронного двигуна і по прийнятому закону скалярного частотного управління двигуном формують на виході перетворювача координат складові вектора напруги в α β нерухомих двофазних координатах (U , U ), по яких генератор широтно-імпульсної модуляції виробляє керуючі сигнали для автономного інвертора напруги, який із постійної напруги формує вихідну перемінну напругу з широтно-імпульсною модуляцією, при цьому зміну завдання по частоті зупиняють при зміні вхідної перемінної напруги в широких межах або при зміні значення завдання по частоті, коли струм або напруга у ланці постійного струму досягає своїх критичних значень і вимикає автономний інвертор напруги від джерела постійного струму доти, доки струм або напруга в ланці постійного струму не стане нижче критичного значення [див. патент 6 Російської Федерації № 2361356 (С1) з класів МПК H02P21/00, H02H7/08, опублікований 10.07.2009 у Бюл. №19]. Недоліком відомого способу є складність обчислень для реалізації системи управління, яка здійснює динамічну зміну режимів роботи асинхронного двигуна, а також коливання значення швидкості двигуна при постійному навантаженні. Найбільш близьким аналогом за кількістю суттєвих ознак та технічним результатом, що досягається, є спосіб управління асинхронним двигуном, що полягає у регулюванні вхідної напруги та частоти асинхронного двигуна за допомогою перетворювача частот, при якому керують вихідною частотою та напругою перетворювача під час пуску двигуна, зменшуючи вихідну напругу і частоту перетворювача до мінімальної величини, у разі збільшення струму в силовому колі до величини, що перевищує робоче значення, при цьому як перетворювач використовують силові керовані ключі, роботою яких управляють за допомогою керуючих сигналів, які отримують з мікроконтролерної системи керування, на яку подають сигнали з датчика швидкості двигуна та з задавального пристрою, за допомогою якого задають бажану величину швидкості, значення напруги для кожної фази, номінальне значення протікаючого 14 струму та величину періоду пуску [див. патент України № 106389 (С2) з класів МПК H02P 23/00, H02P 27/00, H02M 5/00, H02K 17/00, опублікований 26.08.2014 у Бюл. №16]. Недоліком відомого способу є складність реалізації системи управління асинхронним двигуном, а також необхідність використовувати датчик швидкості двигуна, що в цілому обмежує сферу застосування даного способу. В основу винаходу поставлена задача удосконалення способу управління асинхронним двигуном за рахунок забезпечення можливості оперативно управляти асинхронним двигуном при зміні вхідної напруги в широкому діапазоні, в тому числі в умовах несинусоїдальної вхідної напруги, здійснювати при цьому плавний пуск двигуна без використання датчика частоти обертання, гальмування і вихід на задану швидкість, використовуючи заданий оператором алгоритм, а також за рахунок загального спрощення системи управління та забезпечення можливості безперервного управління асинхронним двигуном у всьому діапазоні швидкостей шляхом відповідних технологічних змін. 1 UA 110595 C2 5 10 15 20 25 30 35 40 45 50 55 60 Поставлена задача вирішується тим, що у способі управління асинхронним двигуном, що полягає у регулюванні вхідної напруги та частоти асинхронного двигуна за допомогою перетворювача частот, згідно з пропозицією, управління здійснюють по заданому значенню частоти обертання шляхом одночасної зміни частоти і діючого значення напруги перетворювача, для чого формують моментальні сигнали фаз і форму сигналів управління силового модуля, а також розраховують діюче значення вихідної напруги з урахуванням сталості U/f=const, при цьому за умови заданих частоти і рівня діючої напруги перетворювача частот використовують сформований лінійно-частотно-модульований сигнал, що враховує поточне значення фази, при цьому порівнюють поточне значення вказаного сигналу з попереднім значенням і, в разі їх невідповідності, формують сигнал запису нових значень сигналу у регістр зсуву, за допомогою якого реалізують режим збереження попереднього значення фази в момент перемикання роботи генератора лінійно-частотно-модульованого сигналу, а також формують поточне значення напруги живлення асинхронного двигуна шляхом порівняння попереднього значення напруги і максимально можливого з урахуванням поточної фази та режиму роботи генератора лінійно-частотно-модульованого сигналу, на основі чого формують широтно-імпульсно-модульовані сигнали, за допомогою автоматичного регулювання скважності яких формують величину сталості U/f=const. Застосування у запропонованому способі лінійно-частотно-модульованого сигналу дозволяє враховувати поточне значення фази обертового руху асинхронного двигуна, яке порівнюється з програмним значенням, в результаті чого приймається рішення про оптимальний алгоритм управління асинхронним двигуном. При цьому автоматичне регулювання скважності широтноімпульсно-модульованого сигналу дозволяє забезпечити обмеження струмів в обмотках двигуна та повну відповідність режиму асинхронного двигуна заданому оператором алгоритму управління і при цьому обійтися без залучення датчика швидкості обертання, що служить для формування широтно-імпульсно-модульованих сигналів фаз. Вищевказані ознаки запропонованого технічного рішення є суттєвими ознаками винаходу, що заявляється, а їх сукупність дозволяє отримати очікуваний технічний результат - спрощення системи управління асинхронним двигуном, забезпечення повної відповідності режиму роботи асинхронного двигуна заданому оператором алгоритму, обмеження струмів в обмотках двигуна, підвищення надійності та енергоефективності роботи двигуна, забезпечення можливості регулювання в широкому діапазоні частоти обертання вала електродвигуна, забезпечення плавного запуску двигуна та його зупинки, а також підтримання заданих характеристик при зміні значення вхідної напруги в широкому діапазоні, зокрема і в умовах роботи асинхронного двигуна при несинусоїдальній напрузі живлення. Подальша суть винаходу пояснюється в описі, який наведено нижче як необмежувальний приклад, з посиланням на ілюстративний матеріал, на якому зображено: на фіг. 1 - загальна блок-схема системи управління асинхронним двигуном відповідно до запропонованого способу управління; на фіг. 2 - блок-схема підсистеми управління перетворювачем частот; на фіг. 3 блок-схема підсистеми формування сигналів управління силовим модулем з урахуванням системи управління перетворювачем; на фіг. 4 - режими роботи двигуна при управлінні запропонованим способом. Зображена на фіг. 1 загальна схема системи управління асинхронним двигуном відповідно до запропонованого способу управління включає наступні позначення: 1 - блок задавання частоти широтно-імпульсної модуляції; 2 - блок задавання алгоритму роботи перетворювача частот; 3 - блок встановлення мінімального часу між корекцією розрахункового значення швидкості і поточного, сформованого системою управління; 4 - блок задавання максимально допустимої напруги в колі постійного струму; 5 - блок живлення від мережі змінного струму; 6 блок перетворення змінної напруги трифазної мережі в постійну; 7 - блок формування моментальних сигналів фаз і форми сигналів управління силового модуля, а також розрахування діючого значення вихідної напруги та реалізації необхідної умови U/f=const; 8 блок формування сигналів управління силового модуля; 9-16 - блоки реалізації керованого обмежувача напруги живлення силового модуля; 17-18 - блоки реалізації подільника напруги; 19 - блок реалізації багаторівневого силового модуля; 20 - блок з імітованим навантаженням; 21 блок живлення асинхронного двигуна. Зображена на фіг. 2 блок-схема підсистеми управління перетворювачем частот включає наступні позначення: 22-27 - блоки аналізу заданого алгоритму; 28-31 - блоки вибору поточного способу управління; 32-41 - блок формування лінійно-частотно-модульованого (ЛЧМ) сигналу; 42-53 - блоки задання тактових частот для ЛЧМ-генератора (генератора лінійно-частотномодульованого (ЛЧМ) сигналу) і формування заданої напруги в обмотках асинхронного двигуна з урахуванням сталості U/f=const. 2 UA 110595 C2 5 10 15 20 25 30 Зображена на фіг. 3 блок-схема підсистеми формування сигналів керування силовим модулем з урахуванням системи управління перетворювачем частот включає наступні позначення: 54-56 - блоки задання зсуву фази для трифазної системи управління; 57, 59, 61-65 - блоки формування фаз; 58, 65-67 - блоки корекції напруги з урахуванням частоти; 68-91 блоки формування вихідних сигналів для силового модуля. Запропонований спосіб управління асинхронним двигуном здійснюють наступним чином. Спочатку задають початкові умови для системи управління асинхронним двигуном (фіг.1), а саме: частоту широтно-імпульсної модуляції (блок 1), алгоритм роботи перетворювача енергії (блок 2), мінімальний час між корекцією розрахункового значення швидкості і поточного, сформованого системою управління (блок 3) та максимально допустиму напругу в колі постійного струму (блок 4). Після цього задані блоками 2 і 3 дані разом, у вигляді алгоритму роботи асинхронного двигуна, направляють у систему управління (блок 7). На підставі вхідних даних і заданого алгоритму управління в блоці 7 формують моментальні сигнали фаз і форму сигналів управління силового модуля, а також розраховують діюче значення вихідної напруги з урахуванням сталості U/f=const. При цьому як силовий модуль (блок 19) використовують, наприклад, силовий модуль, побудований на біполярних транзисторах з ізольованим затвором (IGBT модуль), підключений до кіл живлення асинхронного двигуна (блок 21) з імітованим навантаженням (блок 20). Остаточне формування сигналів управління IGBT модуля здійснюють у блоці 8. Далі на підставі часового інтервалу формують поточне і попереднє (якщо t 0 ≠ 0) значення параметрів алгоритму, заданих блоками 1-4, і при порівнянні попереднього значення з поточним забезпечують відповідний режим роботи ЛЧМ-генератора. Вибір характеру зміни частоти обертання асинхронного двигуна здійснюють за допомогою тригерів 26 і 27 (фіг. 2), де сформований сигнал направляють на стартовий тригер (блоки 28-31), за допомогою якого запускають таймери-лічильники управління ЛЧМ-генератором (блоки 42-48) і формують порядок зміни фази сигналів управління асинхронним двигуном. На фіг. 4 в графічному вигляді представлено реалізовану ЛЧМ-генератором закономірність зміни частоти обертання асинхронного двигуна, яка описує найбільш характерні режими роботи асинхронного двигуна при зміні фази сигналів управління силового модуля на заданій ділянці з початковою та кінцевою частотою обертання двигуна, (блоки 32-41). Зміну частоти обертання асинхронного двигуна можна також представити у вигляді: f (t ) f0 b t , (1) Tc Tc ; ; 2 2 де t 35 Fmax Fmin – центральне значення несучої частоти; 2 F Fmin b max – крутизна зміни частоти ЛЧМ сигналу: Tc Fmax ,Fmin – максимальна (кінцева) і мінімальна (початкова) частота ЛЧМ сигналу. f0 При цьому фазу з ЛЧМ сигналом визначають як: t b ( t ) 2 f ( t )dt 2 f0 t t 2 . (2) 2 0 40 З рівнянь (1) і (2) ЛЧМ сигнал управління асинхронним двигуном може бути представлений у вигляді: b S( t ) S 0 sin0 ( t ) S 0 sin 0 2 f0 t t 2 . (3) 2 45 50 Сформований таким чином ЛЧМ сигнал подають в блок формування широтно-імпульсномодульованих сигналів для силового модуля і визначення зміни частоти (блок 38), в якому порівнюють поточне значення сигналу з попереднім значенням і, в разі невідповідності, формують сигнал запису нових значень сигналу (тобто старого сигналу і нового сигналу) у регістри зсуву (вхід II блоку 29). За допомогою вказаного сигналу формують запит на перезапуск таймера лічильника часу, представленого у вигляді D-тригера (блоки 45, 46). За допомогою регістра зсуву на D-тригері (блоки 47, 48) реалізують режим збереження попереднього значення фази в момент перемикання роботи генератора. Це дозволяє зв'язати значення фази на початку роботи ЛЧМ-генератора з фазою сигналу попереднього відлікового інтервалу, мінімальний розмір якого задають блоком 3 фіг. 1. 3 UA 110595 C2 5 10 15 20 25 30 35 40 45 50 Після цього на підставі алгоритму і поточного значення фаз формують поточне значення напруги живлення асинхронного двигуна (блоки 49-53) шляхом порівняння попереднього значення напруги і максимально можливого з урахуванням поточної фази та режиму роботи ЛЧМ-генератора. Отримане таким чином поточне значення напруги живлення асинхронного двигуна разом із попередньо сформованими у блоці 7 фіг. 1 сигналами фаз, подають у блок 8 фіг. 1, де враховують кількість фаз і формують широтно-імпульсно-модульовані сигнали (блоки 54-66, фіг 3.). У блоках 67-73 зібраний генератор широтно-імпульсно-модульованих сигналів, за допомогою якого формують імпульси згідно з фазою "А" (не показано) управляючих сигналів і частоти модуляції, заданої в блоці 1 фіг. 1. Аналогічно для фаз "B" і "С" (не показано) формують управляючі сигнали в блоках 76-91 фіг. 3. Потім вказані сигнали, сформовані у блоці 8 фіг. 1, подають на силовий модуль. Після чого сигнали, перетворені за формою та амплітудою за допомогою силового модуля, подають безпосередньо на асинхронний двигун. Для забезпечення надійної роботи перетворювача фаз і самого асинхронного двигуна, а також для обліку коливання напруги в мережі та стабілізації напруги в результаті роботи системи управління при гальмуванні двигуна, переході на понижену швидкість або реверсі, у запропонованому способі застосовують також керований регулятор напруги з урахуванням поточного значення напруги і максимально заданого блоком 4 фіг. 1. Таким чином, при перевищенні заданої напруги відкривається IGBT-транзистор (блок 15 фіг 1), в результаті чого надмірна напруга розсіюється на баластному резисторі 16 (фіг. 1). Для досягнення оптимального управління даним транзистором, його відкривання здійснюють управляючими імпульсами від тактового генератора (блок 12 фіг. 1), завдяки чому досягають збільшення надійності системи управління та сталості значення напруги в колі ланки постійного струму. Порівняльний аналіз вищевказаного технічного рішення з найбільш близьким аналогом показав, що використання у запропонованому у винаході сформованого лінійно-частотномодульованого сигналу, який враховує поточне значення фази, за умови U/f=const, величину сталості яких формують за допомогою автоматичного регулювання скважності широтноімпульсно-модульованого сигналу відповідно до заданого алгоритму управління асинхронним двигуном, призводить до появи якісно нових технічних властивостей, зокрема таких: забезпечення можливості регулювання в широкому діапазоні частоти обертання вала асинхронного двигуна; підтримання заданих характеристик при різних значеннях вхідної напруги, наприклад при несинусоїдальній напрузі; обмеження струмів в обмотках двигуна; спрощення системи управління асинхронним двигуном та забезпечення повної відповідності режиму його роботи заданому алгоритму; забезпечення плавного запуску та зупинки двигуна, підвищення його надійності та енергоефективності. Оскільки сукупність цих властивостей не була встановлена раніше з існуючого рівня техніки, можна зробити висновок про відповідність запропонованого технічного рішення критерію "винахідницький рівень". При цьому у відомих джерелах патентної та іншої науково-технічної інформації не виявлено способів управління асинхронним двигуном із вказаною в пропозиції сукупністю суттєвих ознак, тому запропоноване технічне рішення вважається таким, що відповідає критерію "новизна". Крім того, за результатами перевірки на практиці, запропонований спосіб управління асинхронним двигуном є придатним для промислового застосування, оскільки не містить у своєму складі жодних технологічних операцій або конструкцій чи матеріалів, які неможливо було б відтворити на сучасному етапі розвитку науки і техніки, зокрема у електротехнічній галузі, а отже, дане технічне рішення вважається таким, що відповідає критерію "промислова придатність". ФОРМУЛА ВИНАХОДУ 55 60 Спосіб керування асинхронним двигуном, що включає регулювання вхідної напруги та частоти асинхронного двигуна за допомогою перетворювача частот, який відрізняється тим, що керування здійснюють по заданому значенню частоти обертання шляхом одночасної зміни частоти і діючого значення напруги перетворювача частот, для чого формують моментальні сигнали фаз і форму сигналів керування силового модуля, а також розраховують діюче значення вихідної напруги з урахуванням сталості U/f=const, при цьому за умови заданих 4 UA 110595 C2 5 10 частоти і рівня діючої напруги перетворювача частот використовують сформований генератором лінійно-частотно-модульований сигнал, що враховує поточне значення фази, при цьому порівнюють поточне значення вказаного сигналу з попереднім значенням і, в разі їх невідповідності, формують сигнал запису нових значень сигналу у регістр зсуву, за допомогою якого реалізують режим збереження попереднього значення фази в момент перемикання роботи генератора лінійно-частотно-модульованого сигналу, а також формують поточне значення напруги живлення асинхронного двигуна шляхом порівняння попереднього значення напруги і максимально можливого з урахуванням поточної фази та режиму роботи генератора лінійно-частотно-модульованого сигналу, на основі чого формують широтно-імпульсномодульовані сигнали, за допомогою автоматичного регулювання скважності яких відповідно до заданого алгоритму керування асинхронним двигуном формують величину сталості U/f=const. 5 UA 110595 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 1/26, H02P 27/06
Мітки: двигуном, спосіб, керування, асинхронним
Код посилання
<a href="https://ua.patents.su/8-110595-sposib-keruvannya-asinkhronnim-dvigunom.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування асинхронним двигуном</a>
Спосіб адаптивного частотного керування асинхронним двигуном
Номер патенту: 68806
Опубліковано: 10.04.2012
Автори: Іскерський Іван Станіславович, Федорейко Валерій Степанович, Луцик Ірина Богданівна, Рутило Микола Іванович, Петрикович Юрій Ярославович
МПК: H02P 1/26
Мітки: асинхронним, адаптивного, спосіб, керування, частотного, двигуном
Формула / Реферат:
Спосіб адаптивного частотного керування асинхронним електродвигуном, що забезпечує енергоефективне його регулювання шляхом формування оптимальної величини напруги статора, який відрізняється тим, що ця величина розраховується за відхиленням напруги, яке пропорційне різниці активної і реактивної складових потужності електродвигуна, в залежності від його механічного навантаження.
Спосіб керування асинхронним двигуном при важкому рушанні та пристрій для його реалізації
Номер патенту: 84176
Опубліковано: 25.09.2008
Автори: Ємець Валерій Васильович, Гладир Андрій Іванович, Романенко Катерина Георгіївна, Хребтова Оксана Анатоліївна, Конох Ігор Сергійович, Гомілко Володимир Іванович
МПК: H02P 1/00
Мітки: пристрій, важкому, асинхронним, реалізації, спосіб, керування, двигуном, рушанні
Формула / Реферат:
1. Спосіб керування асинхронним двигуном при важкому рушанні, що полягає в підключенні асинхронного двигуна до трифазної мережі через перетворювач частоти, формуванні протягом часу t = tT електромагнітного моменту двигуна у функції часу з поступовим збільшенням до значення МП0, що дорівнює пусковому моменту двигуна, контролі процесу запуску впродовж часу t = tB шляхом обчислення ковзання s за миттєвими значеннями струму та напруги статора,...
Спосіб керування асинхронним двигуном та пристрій для його реалізації
Номер патенту: 62097
Опубліковано: 15.12.2003
Автори: Родькін Дмитро Йосипович, Чорний Олексій Петрович, Сичов Сергій Дмитрович
МПК: G01R 31/34
Мітки: спосіб, керування, асинхронним, двигуном, пристрій, реалізації
Формула / Реферат:
1. Спосіб керування асинхронним двигуном, що включає підключення асинхронного двигуна через перетворювач напруги до джерела промислової частоти, вимірювання миттєвих значень напруги та струму статорного ланцюга та розрахунок моменту двигуна, який відрізняється тим, що за даними вимірів розраховують миттєву потужність та момент двигуна, вилучають змінну складову моменту та подають на регулятор системи імпульсно-фазового керування тиристорним...
Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора
Номер патенту: 103708
Опубліковано: 25.12.2015
Автори: Мельников Вячеслав Олександрович, Калінов Андрій Петрович, Кочуров Ілля Михайлович
МПК: H02P 21/00
Мітки: параметрами, двигуном, спосіб, асинхронним, несиметричними, керування, частотного, обмоток, статора
Формула / Реферат:
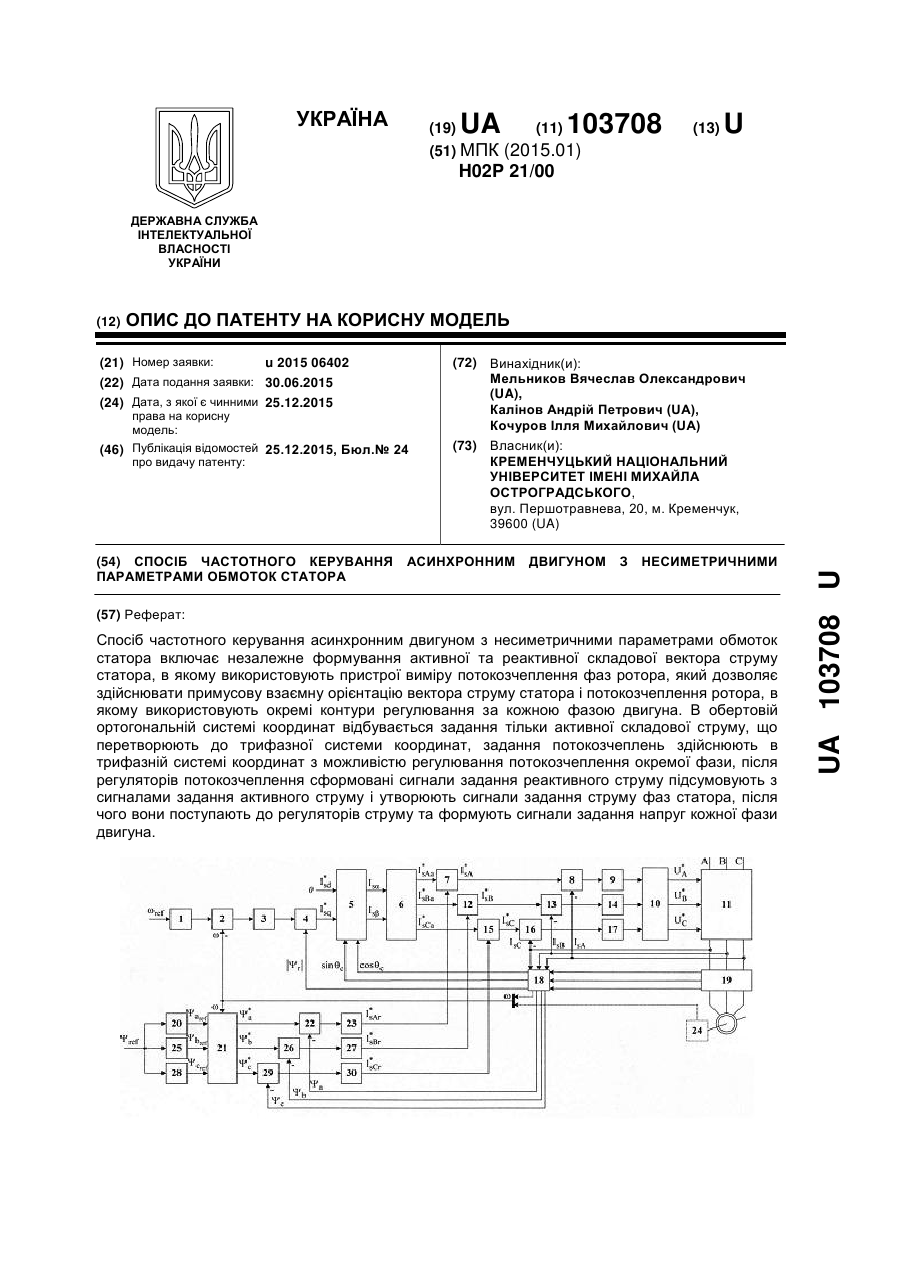
1. Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора, який включає незалежне формування активної та реактивної складової вектора струму статора, в якому використовують пристрої виміру потокозчеплення фаз ротора, який дозволяє здійснювати примусову взаємну орієнтацію вектора струму статора і потокозчеплення ротора, в якому використовують окремі контури регулювання за кожною фазою двигуна, який...
Пристрій керування асинхронним вентильним двигуном
Номер патенту: 80161
Опубліковано: 27.08.2007
Автори: Епштейн Ісаак Ізраілевич, Кохан Павло Степанович, Хоменко Олександр Андрійович
МПК: H02P 29/00, H02K 29/00
Мітки: керування, пристрій, асинхронним, двигуном, вентильним
Формула / Реферат:
Пристрій керування асинхронним вентильним двигуном, підключений до трифазної живильної мережі, який має трифазний мережний вимикач, перші клеми якого з'єднані з відповідними фазами трифазної живильної мережі, асинхронний вентильний двигун, датчик швидкості обертання ротора, що з'єднаний з ротором асинхронного вентильного двигуна, задатчик швидкості обертання, блок керування, до третього і четвертого входів якого підключені виходи відповідно...