Універсальна тензопідвіска та спосіб для визначення силових параметрів просторових навантажень робочих органів землерийних машин
Номер патенту: 111690
Опубліковано: 25.05.2016
Автори: Кучер Олександр Петрович, Мусійко Володимир Данилович, Білякович Микола Олексійович, Коваль Андрій Борисович, Горковенко Олег Володимирович, Дмитриченко Микола Федорович, Вощак Юрій Віталійович
Формула / Реферат
1. Тензопідвіска для замірів силових параметрів просторових навантажень робочих органів землерийних машин, що містить:
- першу частину, що сполучена з приводним стендом, який створює навантаження робочого органу під час досліджень;
- другу частину, що сполучена з робочим органом під час досліджень, при цьому перша та друга частини з'єднані між собою за допомогою тензоланок,
яка відрізняється тим, що
- перша та друга частини виконані суцільними дзеркально-симетричними;
- кожна з частин містить три взаємно перпендикулярні балки;
- при цьому кожна з вказаних частин нерухомо з'єднана з відповідною приєднувальною плитою за допомогою яких перша частина закріплена на рухомій каретці приводного стенда, що створює навантаження робочого органу під час досліджень, а друга виконана з можливістю кріплення до неї досліджуваного робочого органу, при цьому перша та друга частина з'єднані між собою за допомогою шести тензоланок (5), які з'єднують відповідні кінці їх балок.
2. Тензопідвіска за п. 1, яка відрізняється тим, що першу та другу її дзеркально-симетричні частини виконано у вигляді суцільнозварних металоконструкцій, балки яких виконано коробчастого перерізу, при цьому дві балки кожної частини зварені безпосередньо одна з одною, а третя кріпиться до утвореної конструкції через проставку, яка являє собою відрізок балки коробчастого перерізу.
3. Тензопідвіска за п. 1 або п. 2, яка відрізняється тим, що тензоланки є кільцевими, мають однакові приєднувальні розміри і систему кріплень у вигляді кронштейнів, оснащених сферичними шарнірами.
4. Тензопідвіска за пп. 1, 2 або п. 3, яка відрізняється тим, що вісь кожної тензоланки розміщено відносно геометричного центра тензопідвіски на заданій відстані.
5. Спосіб визначення силових параметрів просторових навантажень робочих органів землерийних машин за допомогою тензоподвіски за будь-яким з пп. 1-4, який відрізняється тим, що:
- другу частину тензопідвіски через приєднувальну плиту сполучають з досліджуваним робочим органом;
- першу частину тензопідвіски через приєднувальну плиту сполучають з приводним стендом, яким створюють навантаження робочого органу силами Рx, Рy, Pz, центр прикладання яких зміщено відносно центру тензопідвіски О на невідомі відстані (відповідно а, b, с),
- під час досліджень здійснюють безперервне вимірювання реакцій у тензоланках (R1, R2, R3, R4, R5, R6);
- вирішують систему рівнянь сум сил і сум моментів сил відносно вибраної системи координат, що описує рівновагу даної системи, визначаючи значення відповідних сил та моментів сил:
при цьому шляхом додавання або віднімання електричних сигналів, що надходять від тензодатчиків відповідних пар тензоланок отримують значення сил Рx, Рy, Pz та моментів сил Мx, My, Mz відносно вибраного центра координат.
Текст
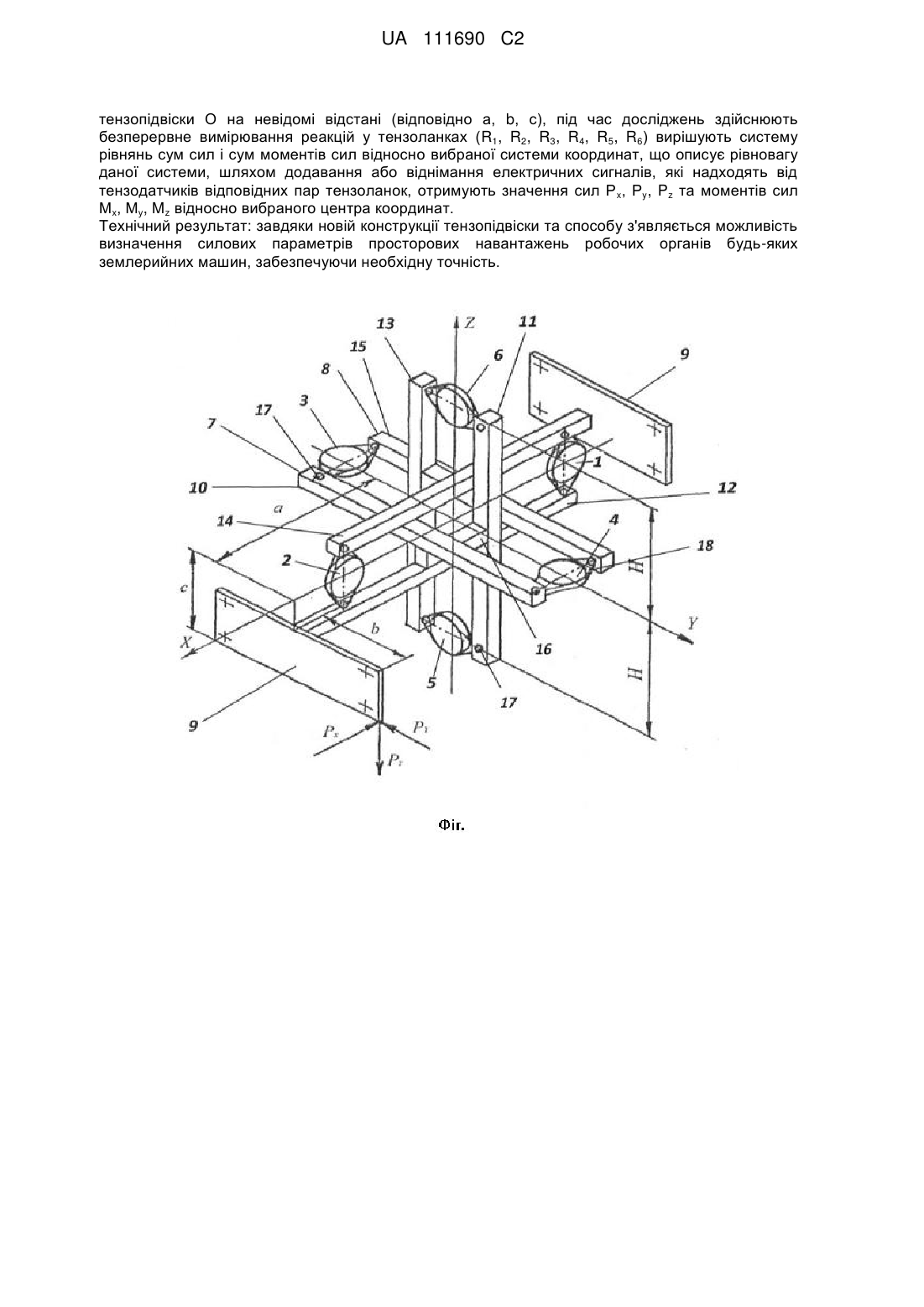
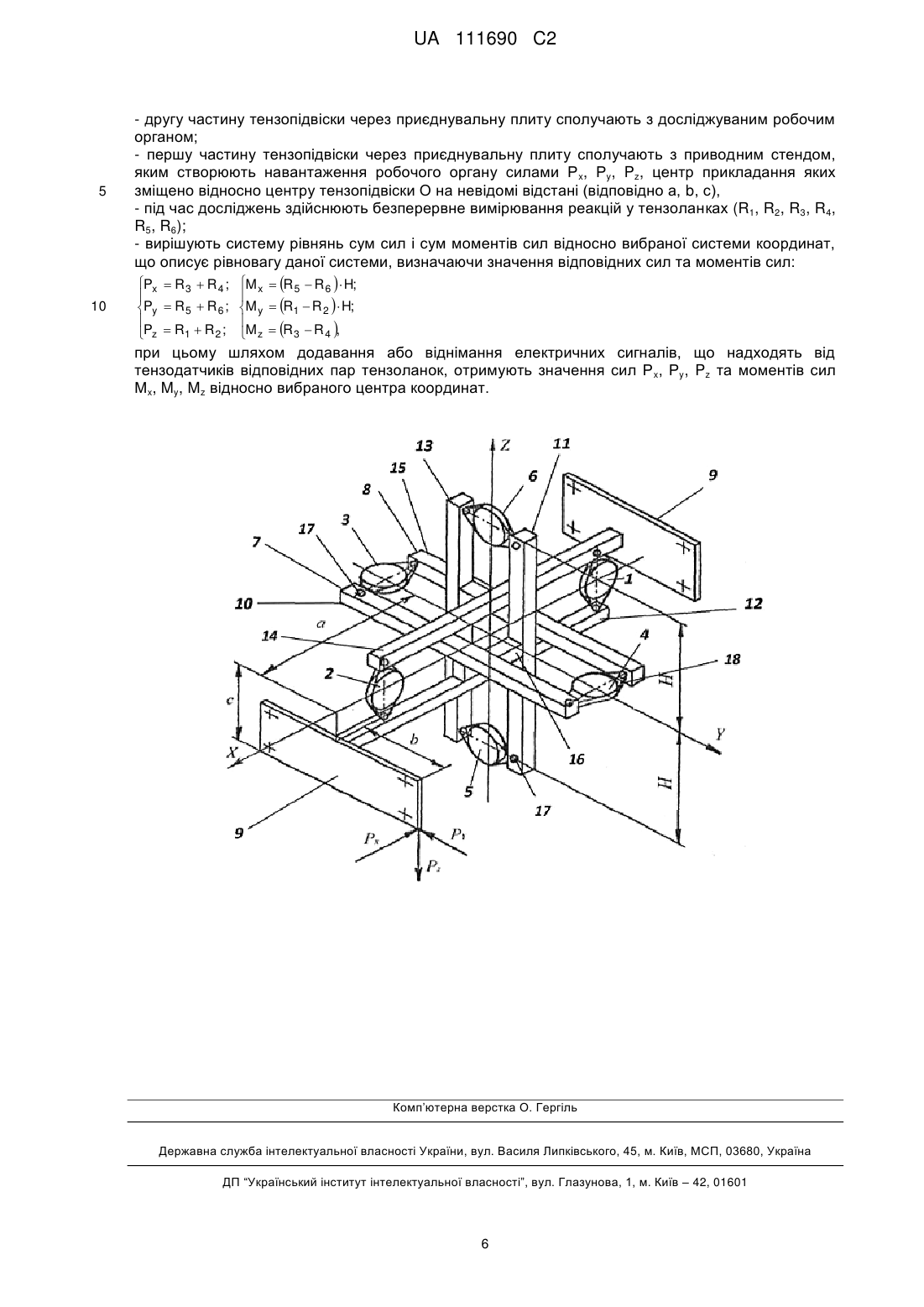
Реферат: Тензопідвіска для замірів силових параметрів навантажень робочих органів землерийних машин містить першу та другу частини, які з'єднані між собою за допомогою шести тензоланок, що з'єднують відповідні кінці їх балок і виконані суцільними дзеркально-симетричними. Кожна з частин містить три взаємно перпендикулярні балки, при цьому кожна з вказаних частин нерухомо з'єднана з відповідною приєднувальною плитою, за допомогою яких перша частина закріплена на рухомій каретці приводного стенда, що створює навантаження робочого органу під час досліджень, а друга виконана з можливістю кріплення до неї досліджуваного робочого органу. Тензоланки є кільцевими, мають однакові приєднувальні розміри і систему кріплень у вигляді кронштейнів, оснащених сферичними шарнірами. Спосіб визначення силових параметрів навантажень робочих органів землерийних машин за допомогою тензопідвіски полягає в тому, що другу частину тензопідвіски через приєднувальну плиту сполучають з досліджуваним робочим органом, а першу частину тензопідвіски через приєднувальну плиту сполучають з приводним стендом, яким створюють навантаження робочого органу силами Рx, Рy, Pz, центр прикладання яких зміщено відносно центру UA 111690 C2 (12) UA 111690 C2 тензопідвіски О на невідомі відстані (відповідно а, b, с), під час досліджень здійснюють безперервне вимірювання реакцій у тензоланках (R1, R2, R3, R4, R5, R6) вирішують систему рівнянь сум сил і сум моментів сил відносно вибраної системи координат, що описує рівновагу даної системи, шляхом додавання або віднімання електричних сигналів, які надходять від тензодатчиків відповідних пар тензоланок, отримують значення сил Р x, Рy, Pz та моментів сил Мx, Му, Mz відносно вибраного центра координат. Технічний результат: завдяки новій конструкції тензопідвіски та способу з'являється можливість визначення силових параметрів просторових навантажень робочих органів будь-яких землерийних машин, забезпечуючи необхідну точність. UA 111690 C2 5 10 15 20 25 30 35 40 45 50 55 60 Група винаходів належить до галузі землерийних машин, їх проектування та дослідження. Винаходи також можуть бути використані у галузі сільськогосподарських та інших ґрунтооброблювальних машин. Для проведення досліджень робочих органів та/або їх моделей сконструйовано та виготовлено універсальну тензопідвіску (УТП), використання якої за запропонованим способом дозволяє з потрібною точністю виконати необхідні заміри силових параметрів навантаження робочих органів, визначити сили та моменти сил, що діють на робочий орган. З рівня техніки загальновідоме використання тензорезисторів для вимірювання різноманітних параметрів навантажень деталей машин. Наприклад з авторського свідоцтва SU 1368674, опубл. 23.01.1988 відомий пристрій для вимірювання крутного моменту, який складається з двох півмуфт з виступами на торцях. В циліндричних пазах цих виступів розміщені валики, що сполучені з пружними елементами за допомогою гвинтів. Пружні елементи виконані у вигляді кілець з тензорезисторами. Деформація пружних елементів, що спричиняється крутним моментом від двигуна через півмуфти сприймається тензорезисторами й передається на вимірювальний прилад. Ця конструкція дозволяє вимірювати тільки крутний момент й не пристосована для дослідження сил, що діють на робочі органи землерийних машин. З авторського свідоцтва SU 1397756, опубл. 23.05.1988 відома тензопідвіска для вимірювання поперечної сили, що містить жорсткі опорні основи, що послідовно з'єднані через проміжні основи з двома взаємно паралельними між собою пружними балками з тензорезисторами, розташовані симетрично й паралельно повздовжній осі динамометра, причому проміжна основа розміщена між обома парами балок, кожна пара балок з'єднана з ним з боку, що є протилежним з'єднаній з цією парою опорній основі. За способом, що відомий з цього авторського свідоцтва під час вимірювання деформацій пружних шарнірів та балок використовують декілька схем розташування тензорезисторів, що дозволяє вимірювати поперечні сили та моменти сил. Одночасно це ускладнює конструкцію та не надає можливості проводити вимірювання заданої точності, оскільки тензометричний динамометр для вимірювання поперечної сили є статично невизначеною системою. Разом з трьома рівняннями статики необхідно складати четверте рівняння деформацій у відповідності з теорією опору матеріалів. В основу першого винаходу поставлено задачу вдосконалити відому тензопідвіску таким чином, щоб вона була придатна для визначення силових параметрів навантажень робочих органів землерийних машин із заданою точністю шляхом зміни конструкції частин тензопідвіски та зв'язків між ними. Поставлена задача для першого винаходу вирішується тим, що у відомій тензопідвісці для замірів силових параметрів навантажень робочих органів землерийних машин, що містить: - першу частину, що сполучена з приводним стендом, який створює навантаження робочого органу під час досліджень; - другу частину, що сполучена з робочим органом під час досліджень, - при цьому перша та друга частини з'єднані між собою за допомогою тензоланок, відповідно до винаходу; - перша та друга частини виконані суцільними дзеркально-симетричними; - кожна з частин містить три взаємно перпендикулярні балки; - при цьому кожна з вказаних частин нерухомо з'єднана з відповідною приєднувальною плитою, за допомогою яких перша частина закріплена на рухомій каретці приводного стенда, що створює навантаження робочого органу під час досліджень, а друга виконана з можливістю кріплення до неї досліджуваного робочого органу; - при цьому перша та друга частина з'єднані між собою за допомогою шести тензоланок, які з'єднують відповідні кінці їх балок. Виконання кожної з частин у вигляді суцільної конструкції, що містить три взаємно перпендикулярних балки та виконання частин дзеркально-симетричними перетворює тензопідвіску у тривимірну статично визначену систему, оснащення тензопідвіски шістьма тензоланками, які з'єднують відповідні кінці їх балок дозволяє виконувати вимірювання всіх навантажень на робочий орган із заданою точністю. Закріплення першої частини на рухомій каретці приводного стенда, що створює навантаження робочого органу під час досліджень, а другої з можливістю кріплення до неї досліджуваного робочого органу через відповідні приєднувальні плити забезпечує універсальність та надійність закріплення. Разом сукупність ознак першого винаходу забезпечує досягнення технічного результату - можливості виконувати необхідні заміри навантажень робочих органів будь-яких землерийних машин, забезпечуючи необхідну точність. 1 UA 111690 C2 5 10 15 20 25 Для підвищення міцності конструкції доцільно, щоб перша та друга її дзеркально-симетричні частини було виконано у вигляді суцільнозварних металоконструкцій, балки яких виконано коробчастого перерізу, при цьому дві балки кожної частини зварені безпосередньо одна з одною, а третя кріпиться до утвореної конструкції через проставку, яка являє собою відрізок балки коробчастого перерізу. Для універсальності тензоланки виконують кільцевими, вони мають однакові приєднувальні розміри і систему кріплень у вигляді кронштейнів, оснащених сферичними шарнірами. Для подальших розрахунків при визначенні параметрів навантажень доцільно, коли вісь кожної тензоланки розміщено відносно геометричного центра тензопідвіски на заданій відстані. В основу другого винаходу поставлено задачу вдосконалити відомий спосіб, під час якого використовують тензопідвіску таким чином, щоб він був придатний для визначення силових параметрів навантажень робочих органів землерийних машин із заданою точністю шляхом використання в ньому нової конструкції тензопідвіски для безперервних замірів параметрів навантажень та застосування системи рівнянь сум сил і сум моментів сил відносно вибраної системи координат. Поставлена задача для другого винаходу вирішується тим, що у відомому способі визначення силових параметрів навантажень робочих органів землерийних машин за допомогою тензопідвіски використовують тензопідвіску за першим винаходом, при цьому другу частину тензопідвіски через приєднувальну плиту сполучають з досліджуваним робочим органом, першу частину тензопідвіски через приєднувальну плиту сполучають з приводним стендом, яким: - створюють навантаження робочого органу силами Р x, Рy, Рz, центр прикладання яких зміщено відносно центру тензопідвіски О на невідомі відстані (відповідно а, b, с); - під час досліджень здійснюють безперервне вимірювання реакцій у тензоланках (R1, R2, R3, R4, R5, R6); - вирішують систему рівнянь сум сил і сум моментів сил відносно вибраної системи координат, що описує рівновагу даної системи, визначаючи значення відповідних сил та моментів сил. Px R 3 R 4 ; Py R 5 R 6 ; Pz R1 R 2 ; 30 35 40 45 50 55 Mx R 5 R 6 H; My R1 R 2 H; Mz R 3 R 4 H. Шляхом додавання або віднімання електричних сигналів, які надходять від тензодатчиків відповідних пар тензоланок отримують значення сил Р x, Рy, Рz, та моментів сил Мx, Му, Mz відносно обраного центра координат. Разом сукупність ознак другого винаходу забезпечує досягнення технічного результату можливості виконувати необхідні визначення навантажень робочих органів будь-яких землерийних машин, забезпечуючи необхідну точність. Суть винаходу пояснюється кресленням, де схематично показано УТП. Тензопідвіска для замірів силових параметрів навантажень робочих органів землерийних машин містить першу частину 7 та другу частину 8, що з'єднані між собою за допомогою тензоланок 1-6 і виконані суцільними дзеркально-симетричними. Кожна з вказаних частин нерухомо з'єднана з відповідною приєднувальною плитою 9, за допомогою яких перша частина 7 закріплена на рухомій каретці приводного стенда, що створює навантаження робочого органу під час досліджень, а друга 8 виконана з можливістю кріплення до неї досліджуваного робочого органу. Кожна з частин містить три взаємно перпендикулярні балки. Перша частина 7 містить балки 10, 11, 12, а друга часина 8 містить балки 13, 14, 15. Шість тензоланок 1-6 з'єднують кінці балок попарно 10 та 15, 11 та 19, 12 та 14. Першу 7 та другу 8 частини виконано у вигляді суцільнозварних металоконструкцій, балки 10-15 яких виконано коробчастого перерізу, при цьому дві балки кожної частини зварені безпосередньо одна з одною, а третя кріпиться до утвореної конструкції через проставку 16, яка являє собою відрізок балки коробчастого перерізу. Тензоланки 1-6 є кільцевими, мають однакові приєднувальні розміри і систему кріплень у вигляді кронштейнів 18, оснащених сферичними шарнірами 17. Вісь кожної тензоланки 1-6 розміщено відносно геометричного центра тензопідвіски на заданій відстані. Слід відзначити, що тензоланки 1-6 розміщено у вертикальній площині XOZ, горизонтальній площині XOY, а також у вертикальній площині YOZ. Поздовжню вісь кожної тензоланки 1-6 розміщено відносно геометричного центра тензопідвіски на відстані Н=210 мм. Для оцінки дії на тензопідвіску невідомих сил Р x, Рy, Рz, центр прикладання яких зміщено відносно центру тензопідвіски О на невідомі відстані (відповідно а, b, с), складено систему 2 UA 111690 C2 5 10 рівнянь сил і моментів сил відносно вибраної системи координат, що описують рівновагу даної системи. Спосіб замірів силових параметрів навантажень робочих органів землерийних машин за допомогою тензопідвіски полягає в тому, що другу частину 8 тензопідвіски через приєднувальну плиту 9 сполучають з досліджуваним робочим органом, а першу частину 7 тензопідвіски через приєднувальну плиту 9 сполучають з приводним стендом, яким створюють навантаження робочого органу силами Рx, Рy, Рz, центр прикладання яких зміщено відносно центру тензопідвіски О на невідомі відстані (відповідно а, b, с), під час досліджень здійснюють безперервне вимірювання реакцій у тензоланках (R1, R2, R3, R4, R5, R6) вирішують систему рівнянь сум сил і сум моментів сил відносно вибраної системи координат, що описує рівновагу даної системи, визначаючи значення відповідних сил та моментів сил: Px R 3 R 4 ; Py R 5 R 6 ; Pz R1 R 2 ; 15 Mx R 5 R 6 H; My R1 R 2 H; Mz R 3 R 4 H. Кожна тензоланка 1-6 працює лише на стиск або розтяг, реакції у тензоланках 1-6 позначено R1, R2, R3, R4, R5, R6. Отже, система рівнянь має вигляд: n n n Fix 0; Fiy 0; Fiz 0; i 1 i 1 i 1 n n n M 0; M 0; M 0 iy iz ix i 1 i 1 i 1 20 25 30 35 40 R 3 R 4 Px 0; R 5 R 6 Py 0; R R P 0; 2 z 1 R5 R 6 H Py c Pz b 0; R R H P a P c 0; 2 z x 1 R 3 R 4 H Py a Px b 0. За виміряними абсолютними значеннями реакцій R1-R6 у відповідних тензоланках вирішується система шести лінійних рівнянь із шістьма невідомими Р x, Рy, Рz, a, b, с. У результаті визначаються моменти сил Мx, Му, Mz відносно вибраного центра координат. Рішення даної системи рівнянь можливо не традиційним алгебраїчним способом, а шляхом додавання або віднімання електричних сигналів, які поступають від тензодатчиків відповідних пар тензоланок 1-6. Для цього використовується з'єднання тензодатчиків у півмости. При цьому фіксують сумарну зміну напруги в електричних ланцюгах, викликану відповідними деформаціями ±х тензодатчиків, а також різницю напруг, що виникають на тензоланках 1-6. Це дає можливість безпосереднього визначення моменту тієї ж сили Р, яка має певне плече прикладання відносно осі розміщення тензоланок 1-6. Шляхом додавання або віднімання електричних сигналів, які надходять від тензодатчиків відповідних пар тензоланок отримують значення сил Р x, Рy, Рz, та моментів сил Мx, Му, Мz відносно вибраного центра координат. Приклад 1 До тензопідвіски прикладено такі сили: Рx=100 Н; Рy=50 Н; Рz=75 Н; лінійні розміри: а=1,5 м; b=0,5 м; с=0,2 м; Н=0,21 м; Рівновага системи в загальному випадку описується системою рівнянь: n n n Fix 0; Fiy 0; Fiz 0; i 1 i 1 i 1 n n n M 0; M 0; M 0, iy iz ix i 1 i 1 i 1 або: 3 UA 111690 C2 R 3 R 4 Px 0; R 5 R 6 Py 0; R R P 0; 2 z 1 R5 R 6 H Py c Pz b 0; R R H P a P c 0; 2 z x 1 R 3 R 4 H Py a Px b 0. Якщо відомі сили, що прикладені до тензопідвіски та координати точки їх прикладення, то в систему рівнянь підставляються значення Рx, Рy, Рz, а, b, с, Н: R 3 R 4 Px ; R 5 R 6 Py ; R R P ; 1 2 z H R 5 H R 6 Py c Pz b; H R H R P a P c; 1 1 z x H R 3 H R 4 Py a Px b. 5 10 R 3 R 4 100; R 5 R 6 50; R1 R 2 75; 0,21 R 5 0,21 R 6 50 0,2 75 0,5; 0,21 R 0,21 R 75 1,5 100 0,2; 1 1 0,21 R 3 0,21 R 4 50 1,5 100 0,5. Система лінійних рівнянь розв'язується (наприклад методом оберненої матриці) відносно R1-R6 R1=257,7381 Н R2=-182,738 Н R3=109,5238 Н R4=-9,52381 Н R5=138,0952 Н R6=-88,0952 Н. З урахуванням того, що: Px R3 R 4 ; Mx R5 R 6 H; Py R5 R6 ; My R1 R 2 H; Pz R1 R2 ; Mz R3 R 4 H. 15 20 25 30 35 R 3 R 4 100; R 5 R 6 50; R1 R 2 75; 0,21 R 5 0,21 R 6 47,5; 0,21 R 0,21 R 92,5; 1 1 0,21 R 3 0,21 R 4 25 знаходимо величини: Pz=75 H My=92,5 H·м Px=100 H Mz=25 H·м Py=50 H Mx=47,5 H·м Приклад 2. Відомі реакції в тензоланках: R1=257,7381 Н R2=-182,738 H R3=109,5238 H R4=-9,52381 H R5=138,0952 H R6=-88,0952 H або сили та моменти сил в тензопідвісці: Pz=75 Н Му=92,5 H·м Рx=100 Н Mz=25 H·м Рy=50 Н Мx=47,5 H·м. Рівняння рівноваги має вигляд: 4 UA 111690 C2 R 3 R 4 Px ; R 5 R 6 Py ; R R P ; 1 2 z H R 5 H R 6 Py c Pz b; H R H R P a P c; 1 1 z x H R 3 H R 4 Py a Px b. Після підстановки в систему рівнянь значень відомих реакцій в тензоланках отримуємо систему рівнянь в наступному вигляді: Px 109,52 9,52 100; Py 138,09 88,09 50; P 257,73 182,73 75; z 0,21 138,09 0,21 88,09 50 c 75 b; 0,21 257,73 0,21 182,73 75 a 75 c; 0,21 109,52 0,21 9,52 50 a 100 b. 5 Звідки розраховуються значення Рx, Рy, Рz, та складається система з трьох лінійних рівнянь з трьома невідомими величинами пліч прикладання зовнішнього навантаження а, b, с: 50 c 75 b 47,5; 75 a 75 c 92,5; 50 a 100 b 25. 10 Рішення цієї системи дає величини пліч прикладення сил: а=1,5 м b=0,5 м с=0,2 м. Технічний результат: завдяки новій конструкції тензопідвіски та способу з'являється можливість визначення силових параметрів просторових навантажень робочих органів будьяких землерийних машин, забезпечуючи необхідну точність. 15 ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 1. Тензопідвіска для замірів силових параметрів просторових навантажень робочих органів землерийних машин, що містить: - першу частину, що сполучена з приводним стендом, який створює навантаження робочого органу під час досліджень; - другу частину, що сполучена з робочим органом під час досліджень, при цьому перша та друга частини з'єднані між собою за допомогою тензоланок, яка відрізняється тим, що - перша та друга частини виконані суцільними дзеркально-симетричними; - кожна з частин містить три взаємно перпендикулярні балки; - при цьому кожна з вказаних частин нерухомо з'єднана з відповідною приєднувальною плитою за допомогою яких перша частина закріплена на рухомій каретці приводного стенда, що створює навантаження робочого органу під час досліджень, а друга виконана з можливістю кріплення до неї досліджуваного робочого органу, при цьому перша та друга частина з'єднані між собою за допомогою шести тензоланок (5), які з'єднують відповідні кінці їх балок. 2. Тензопідвіска за п. 1, яка відрізняється тим, що першу та другу її дзеркально-симетричні частини виконано у вигляді суцільнозварних металоконструкцій, балки яких виконано коробчастого перерізу, при цьому дві балки кожної частини зварені безпосередньо одна з одною, а третя кріпиться до утвореної конструкції через проставку, яка являє собою відрізок балки коробчастого перерізу. 3. Тензопідвіска за п. 1 або п. 2, яка відрізняється тим, що тензоланки є кільцевими, мають однакові приєднувальні розміри і систему кріплень у вигляді кронштейнів, оснащених сферичними шарнірами. 4. Тензопідвіска за пп. 1, 2 або п. 3, яка відрізняється тим, що вісь кожної тензоланки розміщено відносно геометричного центра тензопідвіски на заданій відстані. 5. Спосіб визначення силових параметрів просторових навантажень робочих органів землерийних машин за допомогою тензоподвіски за будь-яким з пп. 1-4, який відрізняється тим, що: 5 UA 111690 C2 5 10 - другу частину тензопідвіски через приєднувальну плиту сполучають з досліджуваним робочим органом; - першу частину тензопідвіски через приєднувальну плиту сполучають з приводним стендом, яким створюють навантаження робочого органу силами Р x, Рy, Pz, центр прикладання яких зміщено відносно центру тензопідвіски О на невідомі відстані (відповідно а, b, с), - під час досліджень здійснюють безперервне вимірювання реакцій у тензоланках (R1, R2, R3, R4, R5, R6); - вирішують систему рівнянь сум сил і сум моментів сил відносно вибраної системи координат, що описує рівновагу даної системи, визначаючи значення відповідних сил та моментів сил: Px R 3 R 4 ; Py R 5 R 6 ; Pz R1 R 2 ; M x R 5 R 6 H; M y R1 R 2 H; Mz R 3 R 4 , при цьому шляхом додавання або віднімання електричних сигналів, що надходять від тензодатчиків відповідних пар тензоланок, отримують значення сил Р x, Рy, Pz та моментів сил Мx, My, Mz відносно вибраного центра координат. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E02F 9/28, G01L 1/08, G01L 5/16
Мітки: просторових, робочих, визначення, органів, універсальна, машин, силових, параметрів, тензопідвіска, навантажень, землерийних, спосіб
Код посилання
<a href="https://ua.patents.su/8-111690-universalna-tenzopidviska-ta-sposib-dlya-viznachennya-silovikh-parametriv-prostorovikh-navantazhen-robochikh-organiv-zemlerijjnikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Універсальна тензопідвіска та спосіб для визначення силових параметрів просторових навантажень робочих органів землерийних машин</a>
Слідкуючий дискретний гідропривід робочих органів землерийних машин
Номер патенту: 52268
Опубліковано: 16.12.2002
Автори: Смірнов Вячеслав Миколайович, Баладінський Вадим Леонідович, Солонько Руслан Миколайович, Рашківський Володимир Павлович, Пелевін Леонід Євгенович
Мітки: дискретний, землерийних, гідропривід, робочих, слідкуючий, органів, машин
Формула / Реферат:
Слідкуючий дискретний гідропривід робочих органів землерийних машин, що включає бак з гідрорідиною, насос, розподільник, запобіжний клапан, гідроциліндр навантаження, який відрізняється тим, що між розподільником та гідроциліндром навантаження встановлено слідкуючий пристрій, що включає в себе клапан спрацювання, вхідна лінія якого під’єднується до напірної магістралі розподільника, а вихідна лінія - до штокової порожнини гідроциліндра...
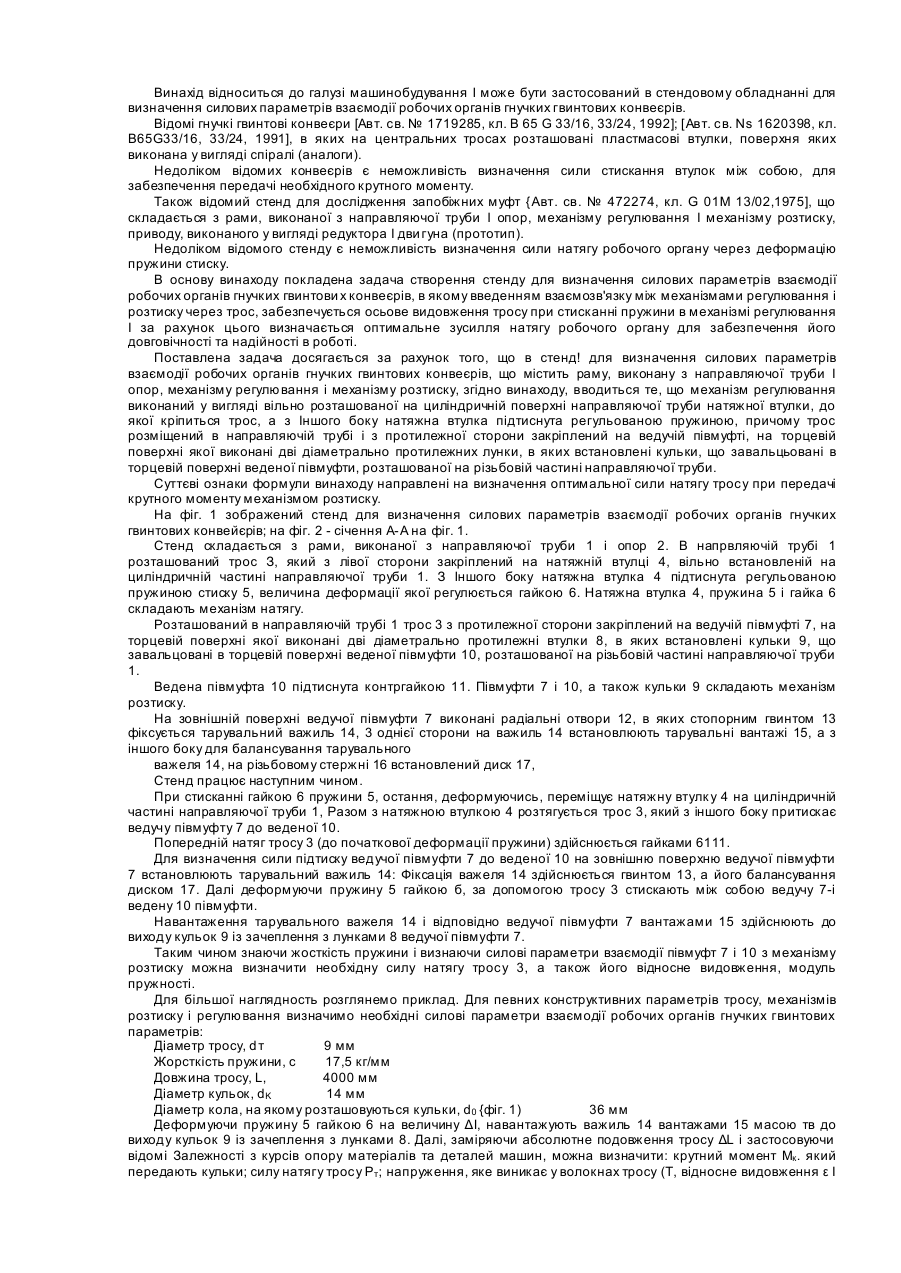
Стенд для визначення силових параметрів взаємодії робочих органів гнучких гвинтових конвеєрів
Номер патенту: 23972
Опубліковано: 31.08.1998
Автори: Безпальок Андрій Петрович, Вітровий Андрій Орестович, Гладьо Юрій Богданович, Гевко Роман Богданович
МПК: B65G 33/16, B65G 33/24, G01M 13/00
Мітки: стенд, взаємодії, гнучких, робочих, конвеєрів, параметрів, органів, визначення, гвинтових, силових
Формула / Реферат:
Стенд для визначення силових параметрів взаємодії робочих органів гнучких гвинтових конвеєрів, що містить раму, виконану з напрямної труби і опор, механізму регулювання і механізму розтискування, який відрізняється тим, що механізм регулювання виконаний у вигляді вільно розташованої на циліндричній поверхні напрямної труби натяжної втулки, до якої кріпиться трос, а з іншого боку натяжна втулка підтиснута регульованою пружиною, причому трос...
Пристрій для дослідження параметрів функціювання робочих органів грунтообробних та посівних машин
Номер патенту: 31569
Опубліковано: 15.12.2000
Автори: Мартиненко Станіслав Володимирович, Дейкун Віктор Анатолійович, Трикін Максим Маратович, Калашнік Ала Леонідівна, Сало Василь Михайлович
МПК: A01B 59/00, A01B 63/00
Мітки: функціювання, посівних, грунтообробних, органів, машин, параметрів, робочих, пристрій, дослідження
Текст:
...умовах. Для його агрегатування достатньо використання рухомих енергетичних засобів, сила тяги яких достатня для переміщення в грунтові окремих робочих органів, що робить дослідження максимально економічним. Крім цього, пристрій дає можливість візуального спостереження за протіканням процесу запису і при необхідності невідкладного його підрегулювання. Інформація, що записується по проходженні залікової ділянки не потребує додаткових...
Спосіб визначення зносу робочих органів землерийно-транспортних машин
Номер патенту: 101455
Опубліковано: 10.09.2015
Автори: Венцель Євген Сергійович, Щукін Олександр Вікторович
МПК: G01B 7/06
Мітки: машин, робочих, органів, зносу, землерийно-транспортних, визначення, спосіб
Формула / Реферат:
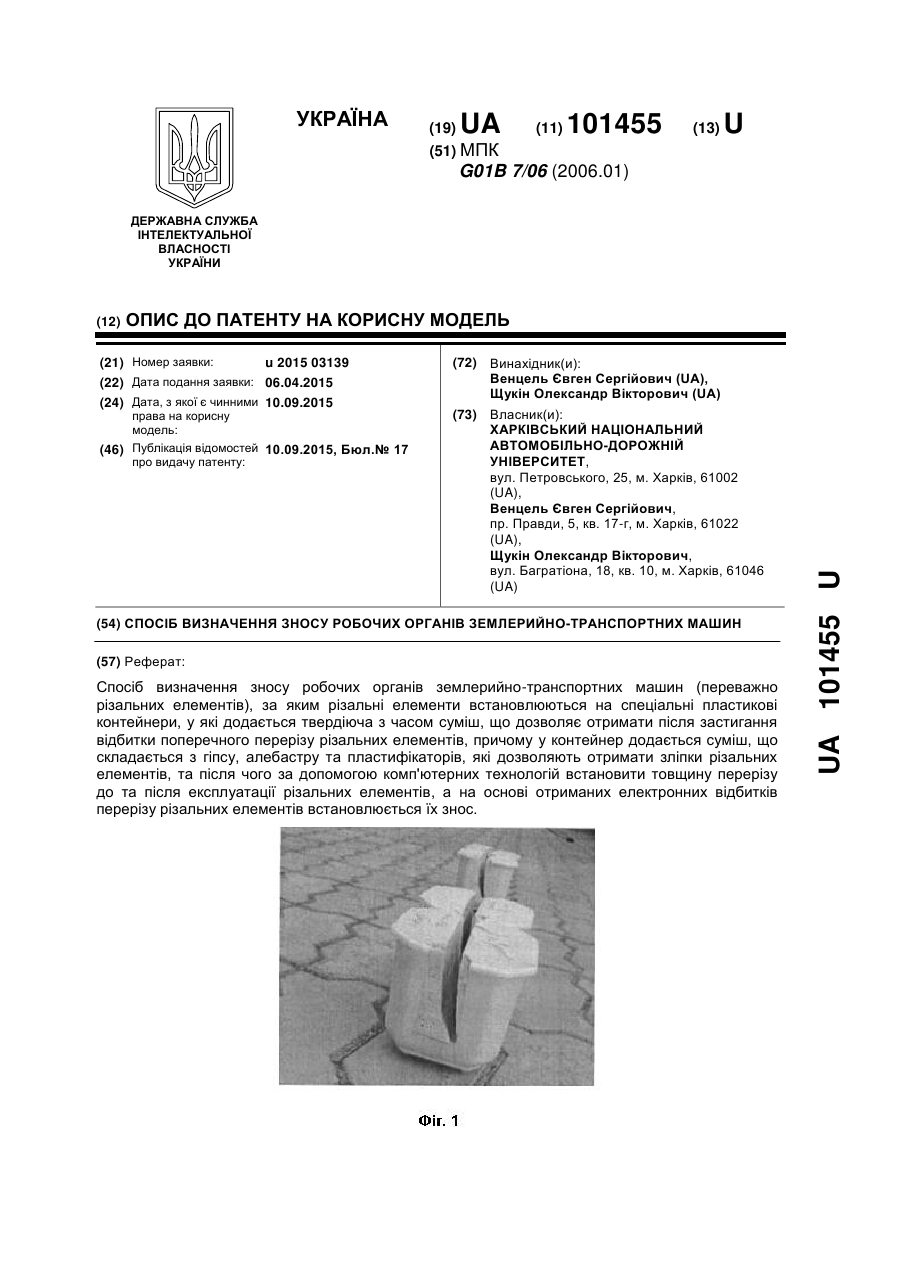
Спосіб визначення зносу робочих органів землерийно-транспортних машин (переважно різальних елементів), за яким різальні елементи встановлюються на спеціальні пластикові контейнери, у які додається твердіюча з часом суміш, що дозволяє отримати після застигання відбитки поперечного перерізу різальних елементів, який відрізняється тим, що у контейнер додається суміш, що складається з гіпсу, алебастру та пластифікаторів, які дозволяють отримати...
Спосіб зміцнення робочих органів сільськогосподарських машин
Номер патенту: 50620
Опубліковано: 15.10.2002
Автори: Саінсус Олександр Дмитрович, Кропівний Володимир Миколайович, Черновол Михайло Іванович, Надворний Борис Євдокимович, Аулін Віктор Васильович, Кулєшков Юрій Володимирович
МПК: B22F 7/02
Мітки: машин, зміцнення, спосіб, робочих, сільськогосподарських, органів
Формула / Реферат:
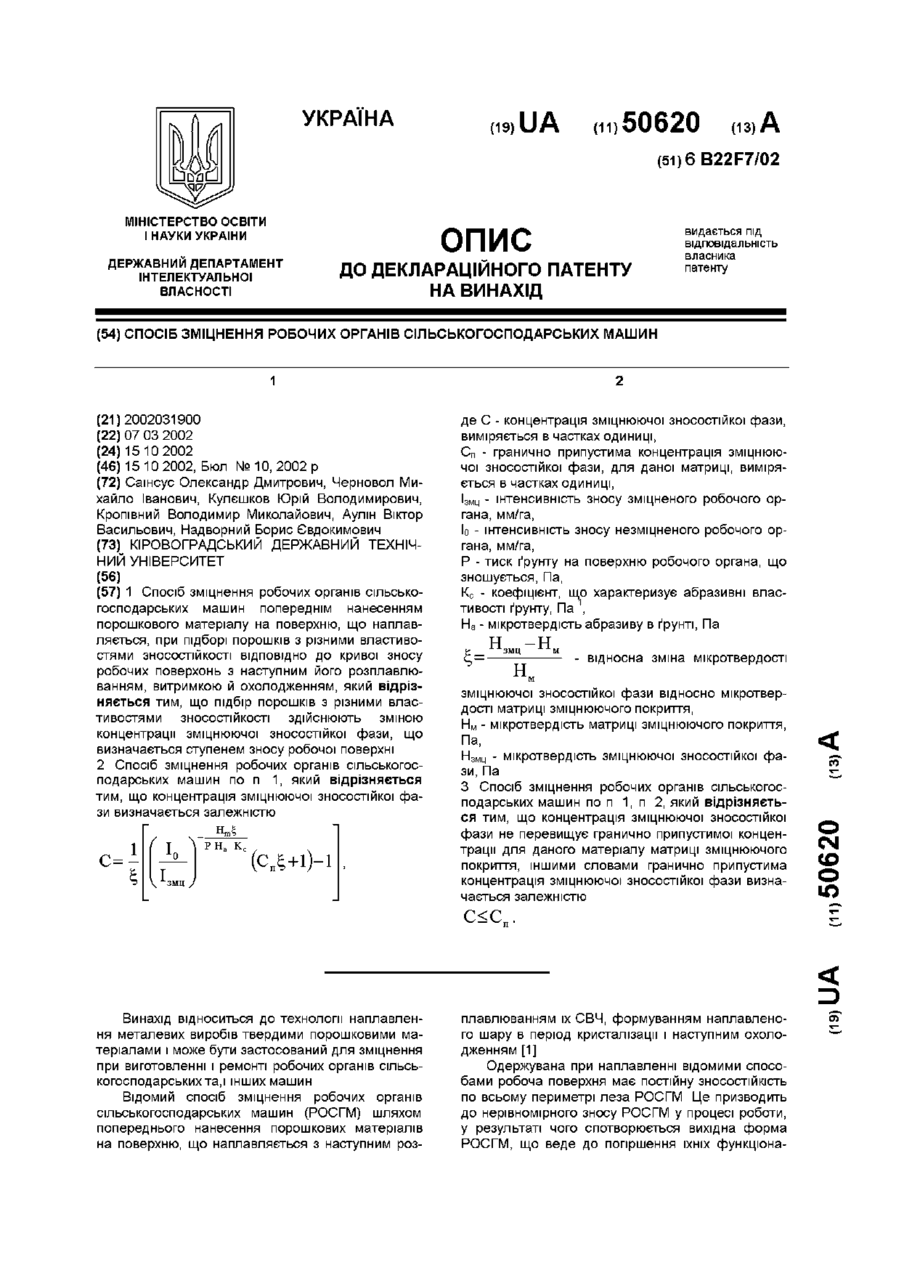
1. Спосіб зміцнення робочих органів сільськогосподарських машин попереднім нанесенням порошкового матеріалу на поверхню, що наплавляється, при підборі порошків з різними властивостями зносостійкості відповідно до кривої зносу робочих поверхонь з наступним його розплавлюванням, витримкою й охолодженням, який відрізняється тим, що підбір порошків з різними властивостями зносостійкості здійснюють зміною концентрації зміцнюючої зносостійкої...
Попередній патент: Пристрій для вимірювання параметрів водних розчинів
Наступний патент: Пристрій для пароплазмової газифікації твердих вуглецевмісних матеріалів
Випадковий патент: Спосіб одержання похідних піримідо[4,3-b][1,3,5]селенадіазину