Кривошипно-планетарний редуктор
Номер патенту: 11172
Опубліковано: 15.12.2005
Автори: Скамбричий Володимир Вікторович, Лиховид Юрій Макарович

Формула / Реферат
1. Кривошипно-планетарний редуктор, що містить корпус (1), тихохідний вал (2), швидкохідний кривошипний вал (3), на якому встановлені на підшипниках (4) сателіти (5, 6) з зовнішніми зубами (7) і циліндричними отворами (8) для цівок (9, 10), перше (11) та друге (12) центральні колеса з внутрішніми зубами (13), що утворюють зачеплення з зубами (7) відповідних сателітів, цівкове колесо, диски (14, 15) якого встановлені з зовнішньої сторони сателітів, опорні цівки (9), встановлені на підшипниках (16) в дисках (14, 15) цівкового колеса, який відрізняється тим, що один із дисків (15) цівкового колеса з'єднаний з тихохідним валом (2), а друге центральне колесо (12) встановлено з можливістю його повороту і фіксації в корпусі (1) редуктора під час монтажу відносно нерухомого першого центрального колеса (11).
2. Редуктор за п. 1, який відрізняється тим, що поворот другого центрального колеса (12) відбувається на кутову величину (17), що відповідає похибці виготовлення відповідного сателіта (6) та люфтів в підшипниках (4) кривошипного вала (3).
Текст
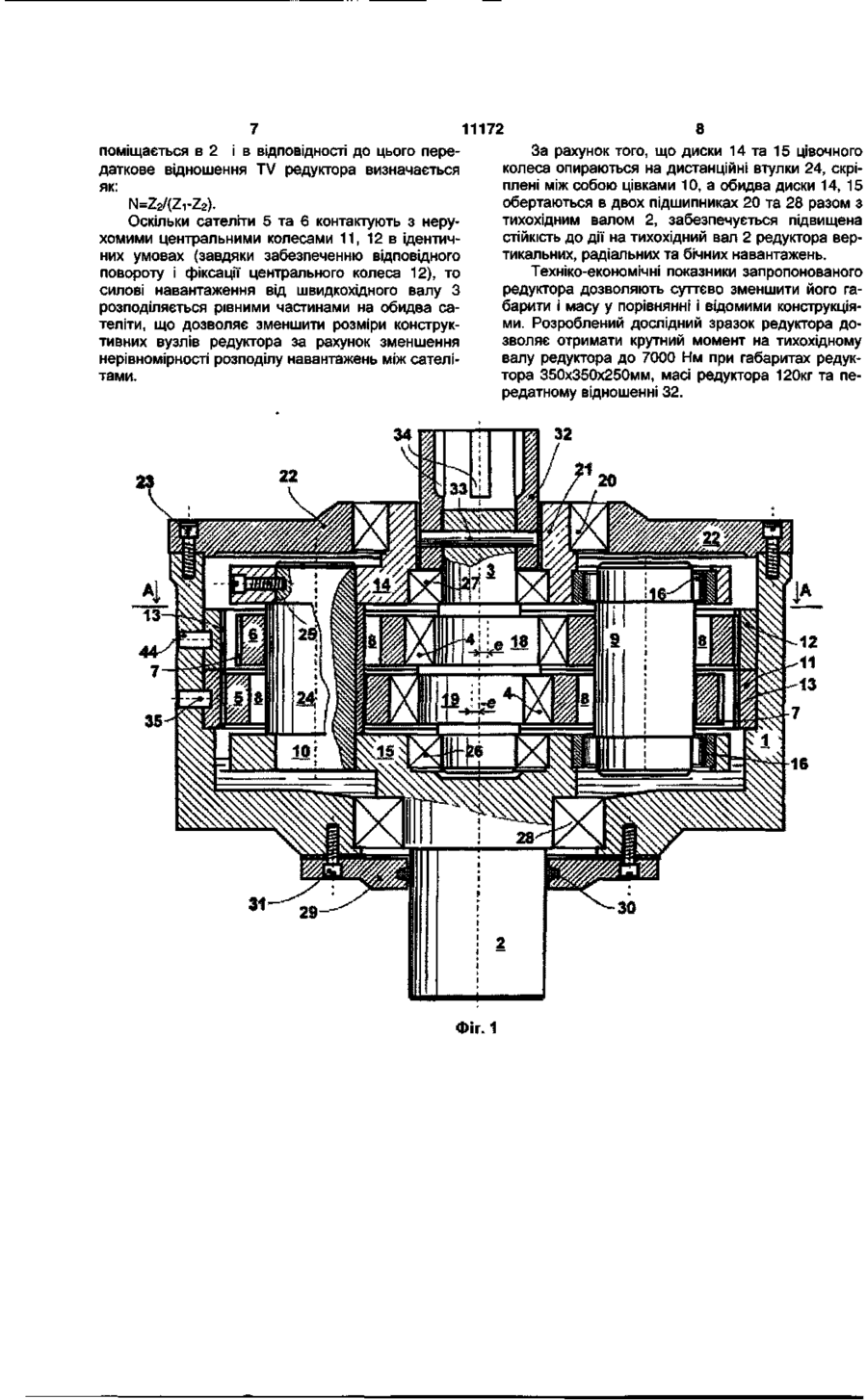
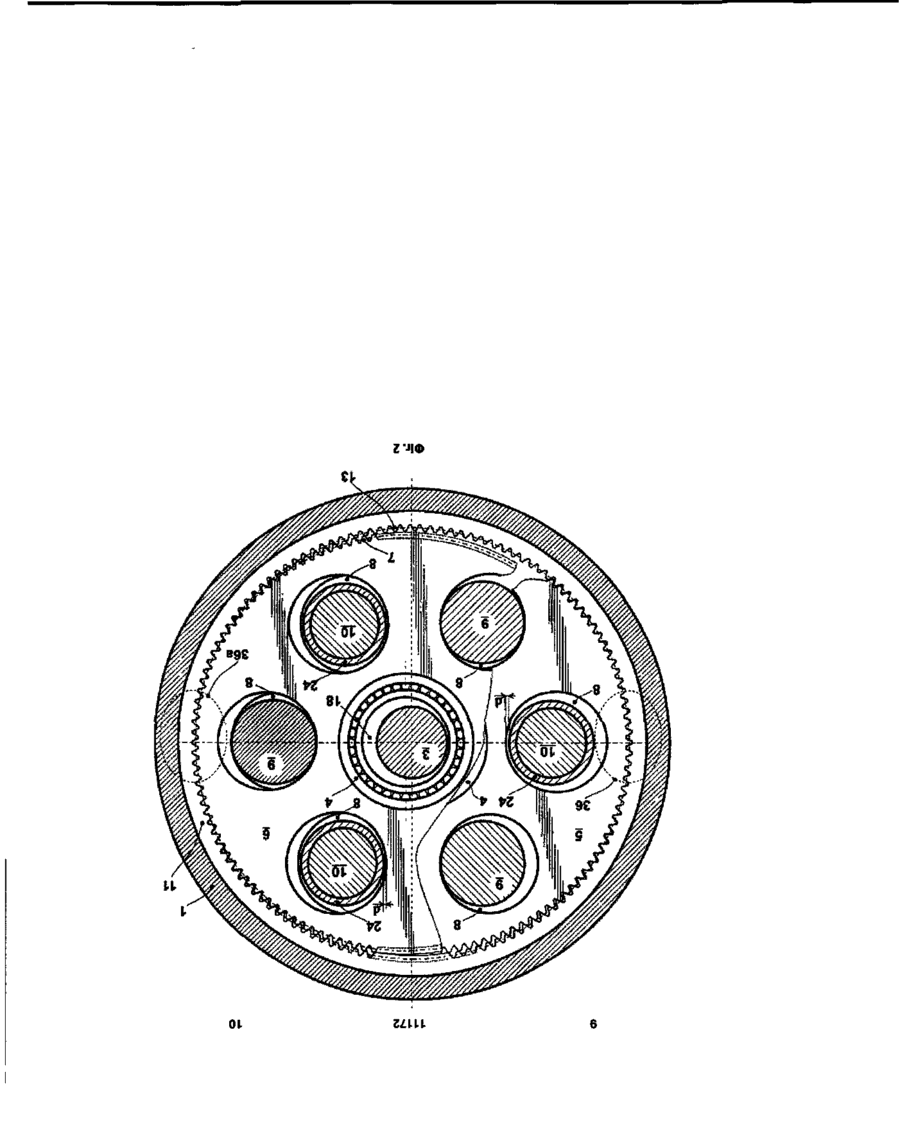
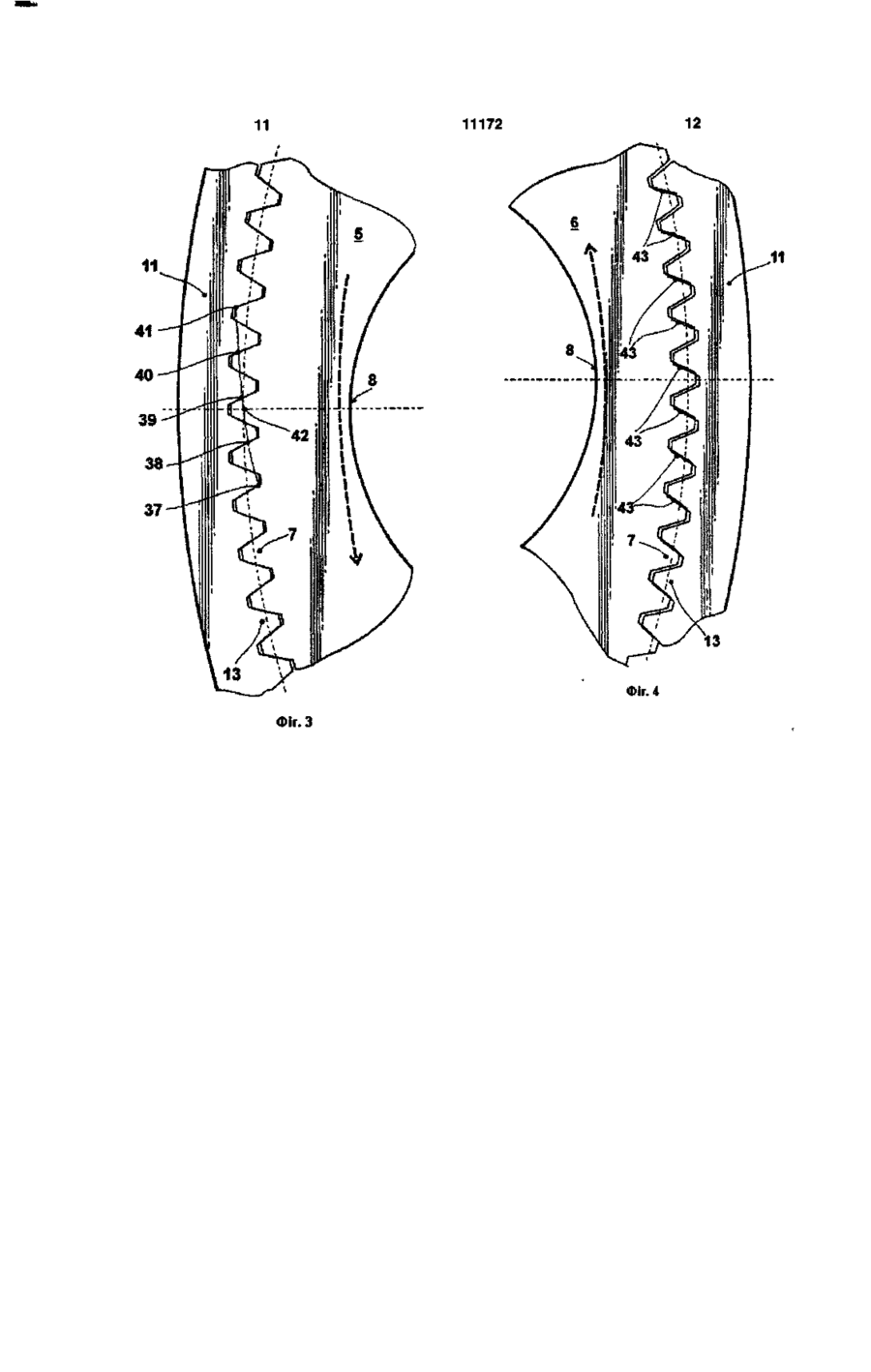
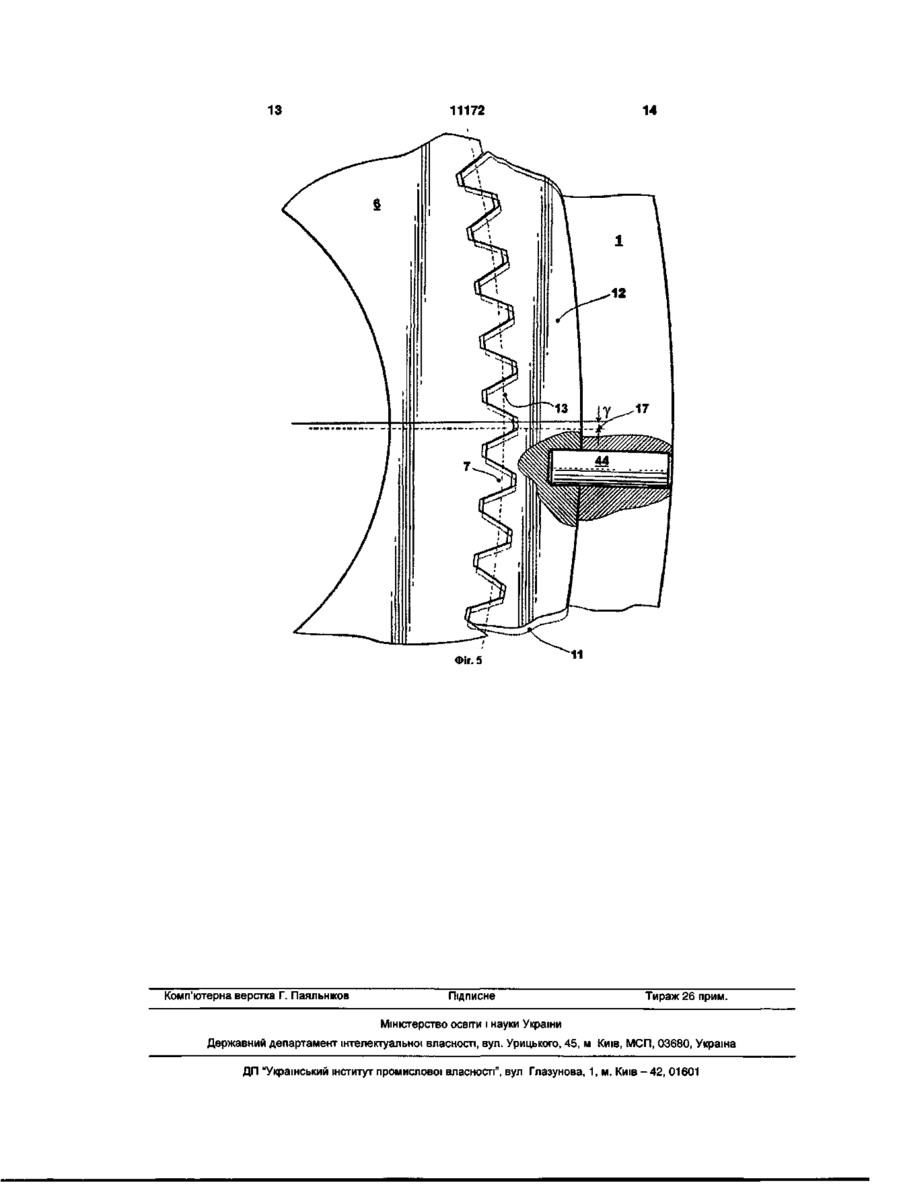
1 Кривошипно-планетарний редуктор, що містить корпус (1), тихохідний вал (2), швидкохідний кривошипний вал (3), на якому встановлені на підшипниках (4) сателіти (5, 6) з ЗОВНІШНІМИ зубами (7) і циліндричними отворами (8) для цівок (9, 10), перше (11) та друге (12) центральні колеса з внутрішніми зубами (13), що утворюють зачеплення з зубами (7) ВІДПОВІДНИХ сателітів, цівкове колесо, диски (14, 15) якого встановлені з зовнішньої сторони сателітів, опорні цівки (9), встановлені на підшипниках (16) в дисках (14, 15) цівкового колеса, який відрізняється тим, що один із дисків (15) цівкового колеса з'єднаний з тихохідним валом (2), а друге центральне колесо (12) встановлено з можливістю його повороту і фіксації в корпусі (1) редуктора під час монтажу відносно нерухомого першого центрального колеса (11) 2 Редуктор за п 1, який відрізняється тим, що поворот другого центрального колеса (12) відбувається на кутову величину (17), що відповідає похибці виготовлення ВІДПОВІДНОГО сателіта (6) та люфтів в підшипниках (4) кривошипного вала (3) Корисна модель відноситься до машинобудування і може бути використана в приводах машин для передачі значних силових навантажень при забезпеченні підвищеної СТІЙКОСТІ ДО ДІЇ на вихідний вал редуктора вертикальних радіальних та бічних навантажень Відомий планетарний редуктор, що містить корпус, кришку, центральне колесо з внутрішніми зубами, складене водило, що містить з'ємну бічну стінку, з'єднану розпірною втулкою і гвинтом з гайкою, і несе на підшипниках три проміжних вали із шестернями на кінцях кожного з них [див патент Російської Федерації № 2011066, М Кл F16H01/32 від 15 04 94 р ] Зазначений планетарний редуктор за рахунок динамічно урівноваженої конструкції складеного сателіта, що має малу різницю чисел зубів з центральним колесом, рівномірного розподілу тангенціальних складових силових навантажень у ТІЛІ сателітів та виключення радіальних складових силових навантажень в опорах ведучих валів у водилі забезпечує передачу великих крутних моментів з передатними числами до 300 Однак недосконалість конструкції водила і вузла кріплення до водила тихохідного валу, а також відсутність у конструкції елементів, що сприймають дію на редуктор через тихохідний вал ЗОВНІШ вантажень знижує надійність роботи планетарного редуктора, збільшує його габарити та масу Відомий також ексцентриковий редуктор, що містить корпус, вхідний, декілька ведучих і вихідний вали, нерухоме центральне колесо з внутрішніми зубами, складене водило, що обертається і несе на підшипниках ведучі вали, ексцентрично встановлені на останніх через підшипники з можливістю відносного переміщення в окружному напрямку сателіти, ексцентриситети яких спрямовані в протилежні сторони, зубцюваті шестірні, одна з яких розміщена СПІВВІСНО з вихідним валом, а ІНШІ на ведучих валах для кінематичного зв'язку останніх із сателітами, що встановлені через підшипники й ексцентрикові втулки одночасно на всі ведучі вали, а центральне колесо і зубцюваті кільця мають малу різницю чисел зубів [патент України №64369 МКл F16H1/32, F16H1/46 від 21 05 2003р ] У зазначеному редукторі фактично існує дві ступіні редукування, перша з яких утворена зубчастими шестернями, встановленими на вхідному валі та на всіх ведучих валах, що виконують функції проміжних валів другої ступіні редукування Друга ступінь редуктора утворена чотирма сателітами з ЗОВНІШНІМИ зубами, що встановлені на три чи більше ведучих (проміжних) валах і входять у (21)U200505238 (22) 01 06 2005 (24)15 12 2005 НІХ І внутрішніх радіальних і ЗОВНІШНІХ ОСЬОВИХ на C M О) 11172 зачеплення з центральним колесом із внутрішніми зубами. Першим недоліком запропонованого технічного рішення є складність конструкції, що зумовлюється наявністю великого числа ексцентриків та ведучих (проміжних) валів, що утворюють одну із ступенів редукування з коефіцієнтом редукції, рівним одиниці. Другим недоліком є та обставина, що при визначеному діаметрі ведучих валів за рахунок їхнього скручування, та в результаті наявності похибок в виготовленні сателітів, ексцентриків та наявності люфтів в підшипниках навантаження від ведучого валу розподіляється між сателітами нерівномірно і переважно на перше і друге сателітні кільця, а третє і четверте кільце працюють як балансири і не передають силові навантаження на вихідний вал. Для усунення такого ефекту необхідно збільшувати діаметри ведучих валів, підвищувати точність виготовлення вузлів, що призводить до збільшення радіальних габаритів редуктора та зростання його вартості виготовлення. Найбільш близьким по технічній сутності до пропонованого технічного рішення є редуктор, що містить корпус, швидкохідний вал з ексцентрично закріпленими втулками, на яких на підшипниках встановлені сателіти з зубами і циліндричними отворами для цівок, загальмоване та обертове центральні зубчаті колеса, що утворюють зачеплення з зубами сателітів через ролики, та вільно плаваюче цівочне колесо, середній диск якого розміщений між сателітами, а два інших його диски встановлені з зовнішнього боку крайніх сателітів, при цьому диски і сателіти зв'язані між собою цівками [патент України №41505. М.Кл. F16H1/28, F16H1/32 від 17.09.2001 p.]. Першим недоліком відомого редуктора є складність конструкції через наявність сепараторів та роликів, що забезпечують зачеплення між сателітами та відповідними центральними колесами. Другий недолік зв'язаний з наявністю неминучих похибок в виготовленні сателітів, ексцентриків та наявності люфтів в підшипниках, в результаті чого навантаження від швидкохідного ведучого валу розподіляється переважно на перший і третій сателіти, а другий і четвертий сателіти працюють як балансири і передають силові навантаження на вихідний вал недостатньо ефективно. Ексцентрики кріпляться до швидкохідного валу за допомогою шпонок, що ослаблює конструкцію і вимагає збільшення діаметру валу. Тому конструкція швидкохідного валу з кривошипними ділянками, що виготовлені з однієї заготовки була би більш надійним рішенням вузла такого редуктора. В основу пропонованого технічного рішення поставлена задача спрощення конструкції редуктора при одночасному забезпеченні зменшення габаритів редуктора за рахунок більш ефективного контакту зубів сателіта з зубами відповідного центрального колеса. Вирішення цієї задачі забезпечується за рахунок технічного результату, який полягає в тому, що кожен сателіт контактує з окремим нерухомим центральним колесом. Для цього в редукторі, який містить корпус, тихохідний вал, швидкохідний кривошипний вал, на якому встановлені на підшипниках сателіти з зовнішніми зубами і циліндричними отворами для цівок, перше та друге центральні колеса з внутрішніми зубами, утворюючі зачеплення з зубами відповідних сателітів, цівочне колесо, диски якого встановлені з зовнішньої сторони крайніх сателітів, опорні цівки, встановлені на підшипниках в дисках цівочного колеса, згідно пропозиції досягається за рахунок того, що один із дисків цівочного колеса з'єднаний з тихохідним валом, а друге центральне колесо встановлено з можливістю його повороту і фіксації в корпусі редуктора під час монтажу відносно першого нерухомого центрального колеса на задану кутову величину. Крім того, згідно пропозиції задана кутова величина повороту другого центрального колеса відповідає похибці виготовлення відповідного сателіта та люфтів в підшипниках сателітів. Між відмінними ознаками технічного рішення і досягнутими технічними результатом є причиннонаслідковий зв'язок. У відомих редукторах декілька сателітів взаємодіють зі спільним центральним колесом. При цьому в результаті неминучих похибок виготовлення сателітів ефективність їх взаємодії і центрального колеса неоднакова. В результаті цього необхідно збільшувати розміри сателітів, підшипників, ексцентриків, валів на величину, що компенсує нерівномірність розподілу силових навантажень між сателітами. В запропонованому технічному рішенні кожен сателіт взаємодіє з окремим центральним колесом, а за рахунок повороту під час збирання редуктора одного із центральних коліс відносно відповідного сателіта забезпечуються ідентичні умови взаємодії сателітів та відповідних центральних коліс, що дозволяє зменшити розміри сателітів, підшипників, та інших вузлів редуктора і тим самим - зменшити габарити редуктора в цілому. Технічне рішення пояснюється кресленнями, де на Фіг.1 зображена конструкція пропонованого редуктора в перерізі; на Фіг.2 - вид А-А на Фіг. 1. На Фіг.З зображено в збільшеному масштабі зачеплення першого сателіта з першим центральним колесом. На Фіг.4 зображено в збільшеному масштабі положення зубів другого сателіта відносно зубів першого центрального колеса при наявності похибок в виготовленні сателіта та кривошипного вузла. На Фіг.5 зображено в збільшеному масштабі зачеплення другого сателіта з другим центральним колесом згідно пропонованого рішення. Редуктор на Фігурах 1 та 2 містить корпус 1, встановлений вертикально тихохідний вал 2, вертикально розміщений швидкохідний кривошипний вал 3, на якому встановлені на підшипниках 4 сателіти 5 та 6 з зовнішніми зубами 7 і циліндричними отворами 8 для цівок 9 та 10, перше 11 та друге 12 центральні колеса з внутрішніми зубами 13, що утворюють зачеплення з зубами 7 відповідних сателітів 5(6), цівочне колесо складене з верхнього 14 та нижнього 15 дисків, які встановлені з зовнішньої сторони сателітів 5 та 6, опорні цівки 9 встановлені на підшипниках 16, нижній диск 15 цівочного колеса з'єднаний з тихохідним валом 2, друге центральне колесо 12 повернуте відносно першого центрального колеса 11 на кутову величину у (див. позицію 17 на Фіг.5), що відповідає похибці виготовлення отворів 8 відповідного сателіта 5 та люфтів в підшипнику 4. Швидкохідний вал 2 містить кривошипні ділянки 18 та 19 на які ексцентрично встановлені через підшипники 4 з можливістю відносного переміщення два сателіти 5 та 6. Ексцентриситети є та -є відповідних сателітів 5 та 6 спрямовані в протилежні сторони. Верхній диск 14 цівочного колеса встановлений в підшипнику 20 за допомогою шийки 21 диска 14 з можливістю обертання разом із нижнім диском 15 цівочного колеса. Підшипник 20 закріплений в кришці редуктора 22. Кришка 22 редуктора прикріплена до корпусу 1 відповідною кількістю гвинтів 23 (показано тільки 2 з них). Диски 14 та 15 цівочного колеса з'єднані між собою за допомогою нерухомих цівок 10 (мінімальна кількість яких становить 3), котрі запресовані одним кінцем в нижньому диску 15. Необхідну відстань між дисками 14 та 15 цівочного колеса та їх паралельність забезпечують дистанційні втулки 24, число яких рівне числу цівок 10. Цівки 10 в верхньому диску 14 цівочного колеса закріплені за допомогою стопорних гвинтів 25. Диски 14 та 15 цівочного колеса тримають підшипники 16 в яких вільно обертаються опорні цівки 9. Цівки 9 та 10 проходять крізь отвори 8 сателітів 5 та 6. Діаметр отворів 8 вибраний більшим від діаметра опорних цівок 9 на величину 2е. При цьому сателіти 5, та 6 опираються на цівки 9 внутрішніми поверхнями отворів 8. Цівки 10 разом з дистанційними втулками 24 вільно проходять крізь отвори 8 всіх сателітів 5 та 6, причому діаметр дистанційної втулки 24 вибраний меншим від діаметра відповідного отвору 8 на величину 2e+d, де d - величина мінімального проміжку (див. Фіг.2) між внутрішньою поверхнею отворів 8 та зовнішньою поверхнею дистанційних втулок 24. Число центральних коліс 11, 12 відповідає числу сателітів 5, 6. Швидкохідний вал 2 разом з ексцентричними ділянками 18, 19 встановлений з можливістю обертання в підшипниках 26, 27, що розташовані в верхньому 14 та нижньому 15 дисках цівочного колеса. 11172 точки вершини зовнішнього зуба 7, в результаті чого в секторі 36 на Фіг.2 забезпечується багатопарність зачеплення зубів сателіта 5 та центрального колеса 11, як це показано на Фіг.З в збільшеному масштабі. При цьому на Фіг.З профілі зубів контактують в точках 37, 38, 39, 40, 41, утворюючи спіральну лінію контакту 42. Положення зубів 7 сателіта 6 відносно центрального колеса 11 в секторі зачеплення 36а на Фіг.2 показано в збільшеному масштабі на Фіг.4. При виготовленні сателіта 6 в результаті неминучих похибок розташування отворів 8 його зуби 7 можуть бути зміщені при збиранні редуктора відносно зубів 13 центрального колеса 11 в точках 43, в результаті чого виникає інтерференція профілів зубів 7 та 13, що не дає змогу правильно встановити сателіт 6 в разом з цівочним колесом 14, 15 в центральне колесо 12 при умові його орієнтації в корпусі редуктора таким же чином, як і центрального колеса 11. Для усунення інтерференції профілів в корпусі 1 встановлено друге обмежено рухоме центральне колесо 12. При цьому зуби 13 колеса 12 не контактують з зубами 7 сателіта 5, а зуби 13 колеса 11 не контактують з зубами 7 сателіта 6. В процесі складання редуктора центральне колесо 12 повертається відносно центрального колеса 11 на кутову величину у (див. Фіг.5), що визначається похибками в виготовленні отворів 8 сателіта 6 та люфтів в підшипнику 4 і фіксується в корпусі 1 редуктора за допомогою відповідної кількості штифтів 44 (див. Фіг.1 та Фіг.5). В результаті цього забезпечується повноцінне багатопарне зачеплення сателіта 6 та другого центрального колеса 12. Положення профілів зубів 13 першого центрального колеса 11 відносно профілів зубів 7 сателіта 6 на Фіг.5 показано пунктиром. Тихохідний вал 2 обертається в підшипнику 28 і проходить через кришку 29, в якій встановлено маслозапірне кільце ЗО. Кришка 29 закріплена в корпусі 1 за допомогою відповідної кількості гвинтів 31. Швидкохідний вал 3 з'єднується з вихідним валом двигуна (на Фіг. 1 не показано) за допомогою втулки 32, що фіксується до валу 3 за допомогою штифта 33. Для передачі крутного моменту від двигуна втулка 32 оснащена шліцами 34. Центральне колесо 11 зафіксоване в корпусі 1 редуктора за допомогою штифтів 35 (на Фіг.1 показано тільки один із них). Центральні колеса 11 та 12 мають однакову кількість Z\ внутрішніх зубів 13; сателіти 5 та б мають також однакову кількість Z2 зовнішніх зубів 7, причому різниця чисел зубів центрального колеса 11(12) та відповідного сателіта 5(6) не більше 6 (ZrZ 2 т 12 11172 11 І / • 3 ^ / / / LJ.K МІ1 1 «і /Є > 13 Фіг. 4 Фіг.З 13 11172 14 Фіг. б Комп'ютерна верстка Г. Паяльніков Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м. Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCrank-planetary reducer
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюКривошипно-планетарный редуктор
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: F16H 1/32
Мітки: редуктор, кривошипно-планетарний
Код посилання
<a href="https://ua.patents.su/8-11172-krivoshipno-planetarnijj-reduktor.html" target="_blank" rel="follow" title="База патентів України">Кривошипно-планетарний редуктор</a>
Планетарний редуктор лисс
Номер патенту: 9246
Опубліковано: 15.09.2005
Автори: Скамбричий Володимир Вікторович, Сорока Леонід Михайлович, Лиховид Юрій Макарович
МПК: F16H 1/28
Мітки: лисс, планетарний, редуктор
Формула / Реферат:
1. Планетарний редуктор, що містить корпус (1), в якому встановлені швидкохідний вал (2), тихохідний вал (3), зовнішнє зубчаcте колесо (4) з внутрішніми зубами (5), що мають перші контактні профілі (30), водило (6, 7), що з'єднане з тихохідним валом (3), декілька встановлених ексцентрично в водилі сателітів (8) з зовнішніми зубами (9), що мають другі контактні профілі (31), та центральну шестірню (10), з'єднану з швидкохідним валом (2), який...
Планетарний редуктор

Номер патенту: 62395
Опубліковано: 15.12.2003
Автори: Амбарцумянц Роберт Вачаганович, Задорожний Андрій Віталійович, Амбарцумянц Карен Робертович
МПК: F16H 57/00
Мітки: редуктор, планетарний
Формула / Реферат:
Планетарний редуктор, який складається з корпусу, центрального зубчатого колеса, сателіта, водила і привідного вала, який відрізняється тим, що водило виконане в вигляді двох ексцентрично, діаметрально протилежно встановлених на підшипниках кочення в корпусі і кільці, встановленому на голчатому підшипнику всередині центрального зубчатого колеса, валів, на яких жорстко закріплені зубчаті колеса, що входять у зчеплення з зубчатим колесом,...
Реверсивний планетарний редуктор
Номер патенту: 39328
Опубліковано: 15.06.2001
Автор: Баев Микола Васильович
МПК: F16H 15/00
Мітки: редуктор, планетарний, реверсивний
Формула / Реферат:
Реверсний планетарний редуктор, що містить корпус, водило, яке через підшипники має опору на корпус та його кришку, співвісно якому розміщено зубчате колесо, яке має свободу обертання навколо своєї осі і шипи на боковій поверхні, зубчате колесо, закріплене відносно корпусу нерухомо, до яких мають зачеплення сателіти, по парі розташованих на кожній осі з водилом, який відрізняється тим, що між кожною парою сателітів симетрично їх осі розміщені...
Планетарний редуктор
Номер патенту: 43388
Опубліковано: 17.12.2001
Автор: Власов Іван Петрович
Мітки: планетарний, редуктор
Формула / Реферат:
Планетарний редуктор, що містить корпус, кришку, встановлені на них на підшипниках центрально розташовані швидкохідний та тихохідний вали, центральне колесо з внутрішніми зубами, складене водило з осьовими елементами жорсткого зв'язку, що несе на підшипниках три ведучих вала з шестірнями на кінцях, які взаємодіють з центральною шестірнею, та розташовані між стінками складеного водила та встановлені одночасно на трьох ведучих валах через...
Квазіпланетарний редуктор
Номер патенту: 72827
Опубліковано: 15.04.2005
Автори: Лиховид Юрій Макарович, Скамбричий Володимир Вікторович, Сорока Леонід Михайлович
МПК: F16H 1/32
Мітки: редуктор, квазіпланетарний
Формула / Реферат:
Квазіпланетарний редуктор, який має корпус, швидкохідний вал з ексцентрично закріпленими втулками, на яких встановлені на підшипниках сателіти з зовнішніми зубами і циліндричними отворами для цівок, обертове центральне зубчате колесо з внутрішніми зубами, з'єднане з тихохідним валом і утворююче зчеплення з зубами сателітів, цівочне колесо, диски якого встановлені з зовнішньої сторони крайніх сателітів, який відрізняється тим, що цівки...
Попередній патент: Вертикальний кривошипний редуктор
Наступний патент: Система освітлення та вентиляції санітарно-гігієнічних приміщень пасажирського вагона
Випадковий патент: Спосіб і пристрій для викопування коренеплодів, зокрема буряків