Маніпулятор для нанесення покриття
Формула / Реферат
1. Система нанесення покриття, що містить:
планетарний маніпуляторний вузол, який містить:
перший привідний вал, здатний одержувати обертальний вхідний вплив,
сонячну шестірню, прикріплену з можливістю обертання до першого привідного вала для обертання разом з ним,
планетарну шестірню, зачеплену з сонячною шестірнею,
другий привідний вал, прикріплений з можливістю обертання до планетарної шестірні для обертання разом з нею, так що крутний момент передається від сонячної шестірні планетарній шестірні, щоб обертати другий привідний вал,
опорний вал, функціонально зчеплений з другим привідним валом, при цьому опорний вал розміщений, по суті, перпендикулярно другому привідному валу,
корпус несучого елемента, що підтримує планетарну шестірню відносно сонячної шестірні, при цьому корпус несучого елемента виконаний з можливістю обертання навколо спільної осі з сонячною шестірнею, і при цьому обертання корпусу несучого елемента спричиняє обертання планетарної шестірні і другого привідного вала навколо сонячної шестірні,
третій привідний вал, виконаний з можливістю одержання обертального вхідного впливу, і
ведучу шестірню, прикріплену з можливістю обертання до третього привідного вала для обертання разом з ним, при цьому обертання ведучої шестірні спричиняє обертання корпусу несучого елемента, і
джерело покриття, розташоване в функціональній близькості з планетарним маніпуляторним вузлом.
2. Система за п. 1, в якій перший привідний вал і другий привідний вал розміщені паралельно один одному.
3. Система за п. 1, в якій перший привідний вал і третій привідний вал розміщені паралельно один одному.
4. Система за п. 1, яка додатково містить:
шестірню несучого елемента, прикріплену з можливістю обертання до корпусу несучого елемента і зачеплену з ведучою шестірнею.
5. Система за п. 4, в якій шестірня несучого елемента підтримується з можливістю обертання на першому привідному валу і здатна обертатися незалежно від першого привідного вала.
6. Система за п. 1, яка додатково містить:
конічні шестерні, які забезпечують обертальне зчеплення між другим привідним валом і опорним валом.
7. Система за п. 1, яка додатково містить:
фіксатор для підтримування заготовки, прикріплений до опорного вала.
8. Система за п. 7, яка додатково містить:
заготовку сегмента крильчатки газотурбінного двигуна, що має пару аеродинамічних профілів, які проходять між внутрішньою платформою і зовнішньою платформою, при цьому фіксатор підтримує заготовку сегмента крильчатки за допомогою опорного вала планетарного маніпуляторного вузла, спозиціонованого в середній точці, розташованій між аеродинамічними профілями і між внутрішньою і зовнішньою платформами.
9. Система за п. 1, що додатково містить:
корпус маніпулятора для захисту компонентів планетарного маніпуляторного вузла від матеріалу покриття з джерела покриття.
10. Система за п. 1, в якій джерело покриття містить вузол електронно-променевого фізичного осадження з парової фази.
11. Спосіб нанесення покриття на заготовку, що містить етапи, на яких:
обертають сонячну шестірню навколо першої осі,
обертають планетарну шестірню і привідний вал, використовуючи сонячну шестірню,
обертають опорний вал, використовуючи планетарну шестірню і привідний вал, при цьому опорний вал обертається навколо другої осі, яка перпендикулярна першій осі,
обертають корпус несучого елемента, щоб переміщувати планетарну шестірню і привідний вал по окружності сонячної шестірні,
підтримують заготовку на дальньому кінці опорного вала, і
доставляють матеріал покриття на заготовку.
12. Спосіб за п. 11, в якому матеріал покриття доставляється в напрямку, по суті, перпендикулярному першій осі.
13. Система нанесення покриття, що містить:
планетарний маніпуляторний вузол, який містить:
перший привідний вал, виконаний з можливістю одержання обертального вхідного впливу,
сонячну шестірню, прикріплену з можливістю обертання до першого привідного вала для обертання разом з ним,
планетарну шестірню, зачеплену з сонячною шестірнею,
другий привідний вал, прикріплений з можливістю обертання до планетарної шестірні для обертання разом з нею, так що крутний момент передається від сонячної шестірні до планетарної шестірні, щоб обертати другий привідний вал, при цьому перший привідний вал і другий привідний вал розміщені паралельно один одному,
опорний вал, функціонально зчеплений з другим привідним валом, при цьому опорний вал розміщений, по суті, перпендикулярно другому привідному валу,
конічні шестерні, які забезпечують обертальне зчеплення між другим привідним валом і опорним валом,
корпус несучого елемента, що підтримує планетарну шестірню відносно сонячної шестірні, при цьому корпус несучого елемента виконаний з можливістю обертання навколо спільної осі з сонячною шестірнею, і при цьому обертання корпусу несучого елемента спричиняє обертання планетарної шестірні і другого привідного вала навколо сонячної шестірні,
третій привідний вал, виконаний з можливістю одержання обертального вхідного впливу, при цьому перший привідний вал і третій привідний вал розміщені паралельно один одному,
ведучу шестірню, прикріплену з можливістю обертання до третього привідного вала для обертання разом з ним, при цьому обертання ведучої шестірні спричиняє обертання корпусу несучого елемента, і
шестірню несучого елемента, прикріплену з можливістю обертання до корпусу несучого елемента і зачеплену з ведучою шестірнею, і
джерело покриття, розташоване в функціональній близькості з планетарним маніпуляторним вузлом.
14. Система за п. 13, в якій шестірня несучого елемента підтримується з можливістю обертання на першому привідному валу і здатна обертатися незалежно від першого привідного вала.
15. Система за п. 13, яка додатково містить:
фіксатор для підтримування заготовки, прикріплений до опорного вала.
16. Система за п. 15, яка додатково містить:
заготовку сегмента крильчатки газотурбінного двигуна, що має пару аеродинамічних профілів, які проходять між внутрішньою платформою і зовнішньою платформою, при цьому фіксатор підтримує заготовку сегмента крильчатки за допомогою опорного вала планетарного маніпуляторного вузла, спозиціонованого в середній точці, розташованій між аеродинамічними профілями і між внутрішньою і зовнішньою платформами.
17. Система за п. 13, яка додатково містить:
корпус маніпулятора для захисту компонентів планетарного маніпуляторного вузла від матеріалу покриття з джерела покриття.
18. Система за п. 13, в якій джерело покриття містить вузол електронно-променевого фізичного осадження з парової фази.
Текст
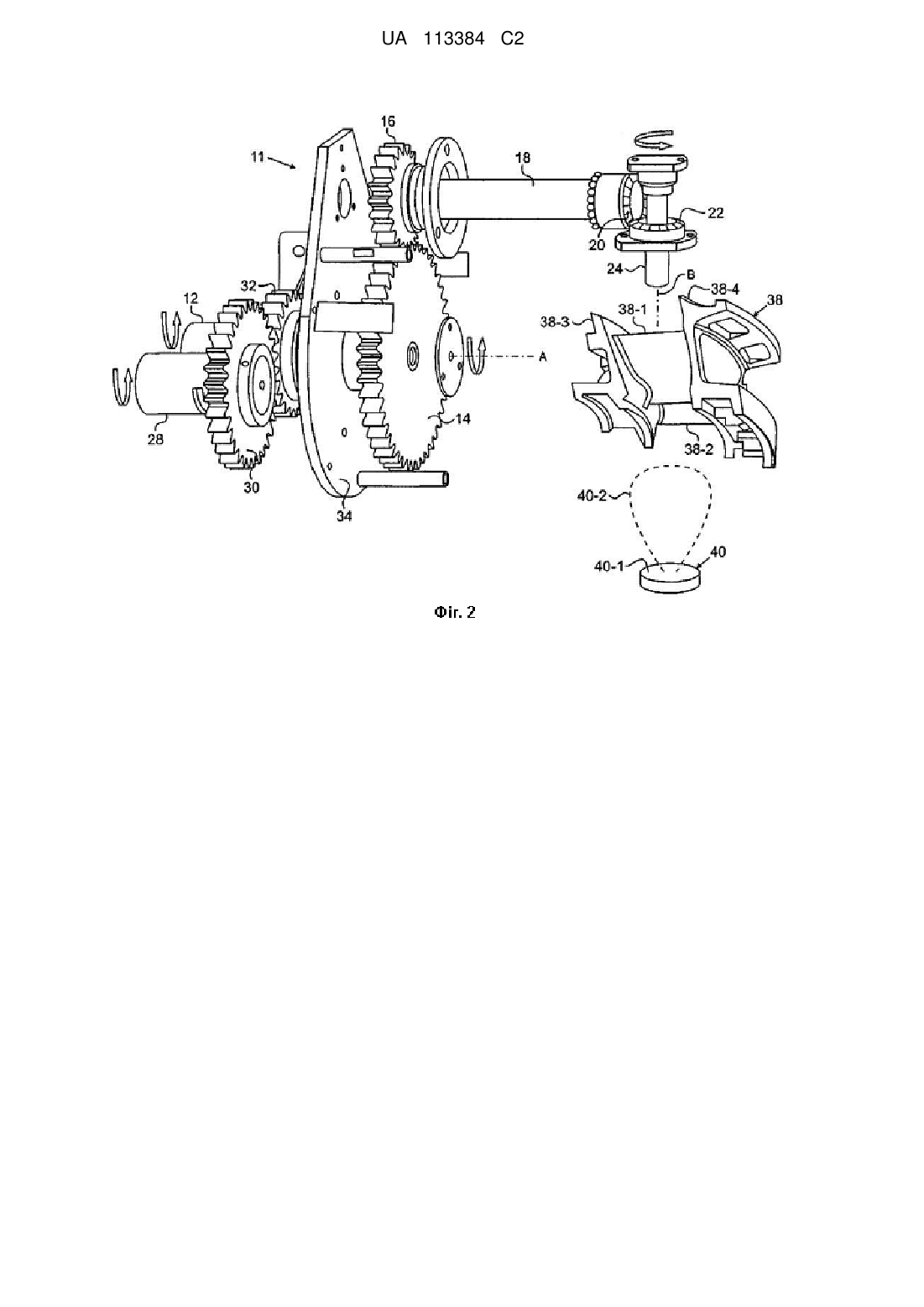
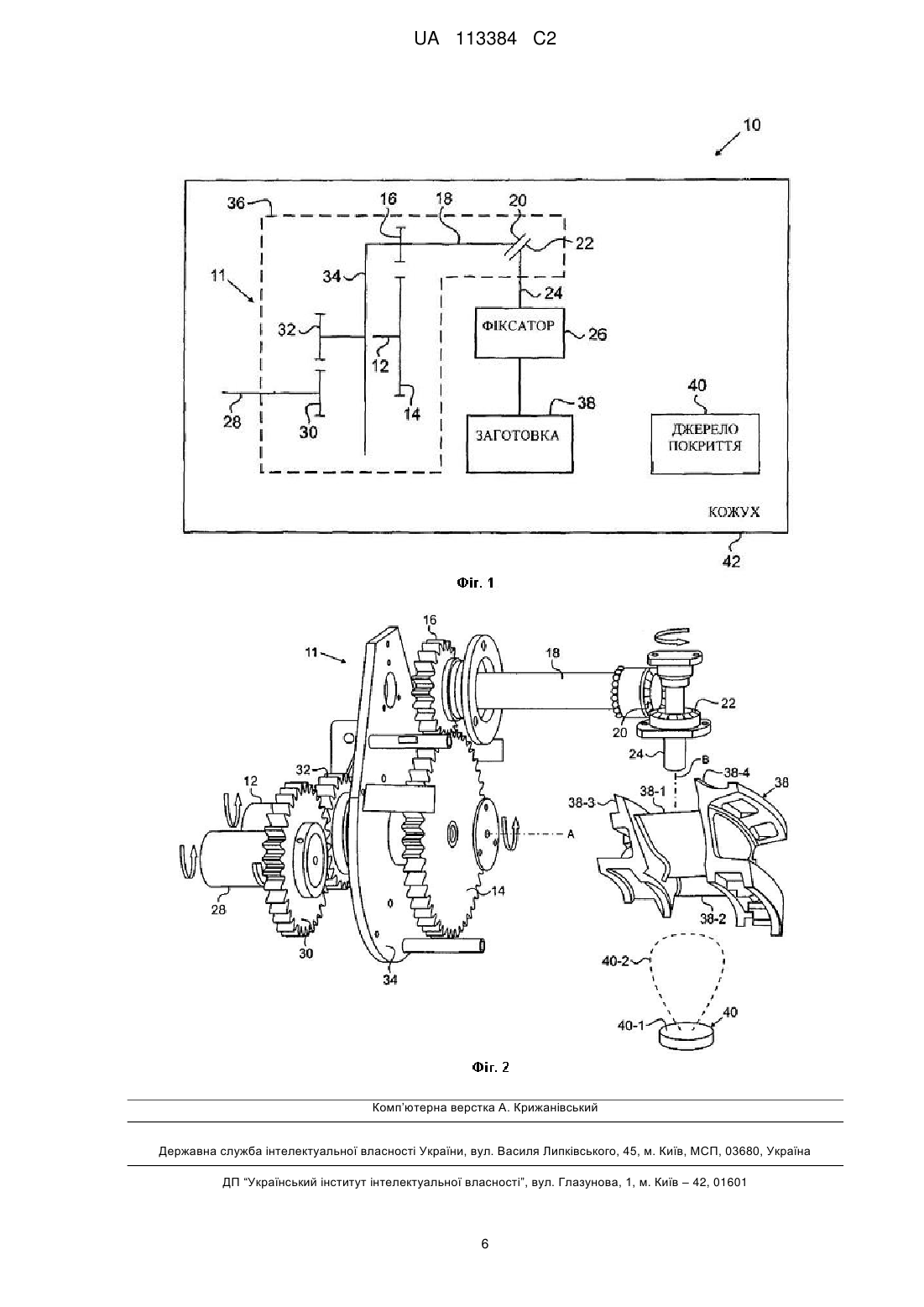
Реферат: Система нанесення покриття містить джерело покриття і планетарний маніпуляторний вузол, який містить перший привідний вал, здатний одержувати обертальний вхідний вплив, сонячну шестірню, прикріплену з можливістю обертання до першого привідного вала, планетарну шестірню, зачеплену з сонячною шестірнею, другий привідний вал, прикріплений з можливістю обертання до планетарної шестірні, так що крутний момент передається від сонячної шестірні до планетарної шестірні, опорний вал, функціонально зчеплений з другим привідним валом, корпус несучого елемента, що підтримує планетарну шестірню відносно сонячної шестірні, третій привідний вал, здатний одержувати обертальний вхідний вплив, і ведучу шестірню, прикріплену з можливістю обертання до третього привідного вала. Опорний вал розміщений, по суті, перпендикулярно другому привідному валу. Корпус несучого елемента здатний повертатися за допомогою ведучої шестірні навколо загальної осі з сонячною шестірнею, і обертання корпусу несучого елемента спричиняє обертання планетарної шестірні і другого привідного вала навколо сонячної шестірні. UA 113384 C2 (12) UA 113384 C2 UA 113384 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід стосується систем покриттів для нанесення покриттів на заготовки, а більш конкретно, систем покриттів, які включають в себе маніпулятор, що має планетарну зубчату передачу. Для того, щоб наносити покриття на заготовки з бажаним розподілом покриття, можуть бути використані маніпулятори, щоб переміщувати заготовку в потоці, струмені або хмарі матеріалу для покриття. Такі маніпулятори дозволяють більш рівномірний розподіл товщини покриття на різних поверхнях заготовок, особливо заготовок з відносно складною геометрією і важкодоступними (наприклад, не в межах прямої видимості) областями. Існують маніпулятори, які приводяться в рух зубчатим механізмом, що включають в себе маніпулятори з важелями, що приводяться в рух зубчатим механізмом, які повертаються і переміщуються вгору і вниз до +/45° в переміщенні типу "метелика", щоб забезпечувати одну закінчену вісь обертання і одну часткову вісь обертання. Газотурбінні двигуни включають в себе численні компоненти з різними покриттями. Наприклад, газотурбінні двигуни часто включають в себе сегменти крильчатки, такі як "дублети", з парою аеродинамічних профілів, що проходять між внутрішньою і зовнішньою платформами. Такі дублети можуть включати в себе покриття, що утворюють тепловий бар'єр (ТВС), виконані з кераміки або інших матеріалів, а також, що стосуються зовнішнього середовища або інші покриття. Конфігурація типових дублетів крильчатки з торцями з точно виготовленими профілями може ускладнювати нанесення покриття з одноманітним розподілом покриття, в тому числі в зоні укосу між аеродинамічними профілями. Отже, бажано надати альтернативну систему покриття, що має альтернативний маніпулятор для заготовки. Система покриття згідно з даним винаходом включає в себе джерело покриття і планетарний маніпуляторний вузол, який включає в себе перший привідний вал, здатний одержувати обертальний вхідний вплив, сонячну шестірню, прикріплену з можливістю обертання до першого привідного вала, планетарну шестірню, що зачіплюється з сонячною шестірнею, другий привідний вал, прикріплений з можливістю обертання до планетарної шестірні, так що крутний момент передається від сонячної шестірні до планетарної шестірні, опорний вал, функціонально зчеплений з другим привідним валом, корпус несучого елемента, підтримуючий планетарну шестірню відносно сонячної шестірні, третій привідний вал, здатний одержувати обертальний вхідний вплив, і ведучу шестірню, прикріплену з можливістю обертання до третього привідного вала. Опорний вал розміщується, по суті, перпендикулярно другому привідному валу. Корпус несучого елемента здатний повертатися за допомогою ведучої шестірні навколо загальної осі з сонячною шестірнею, і обертання корпусу несучого елемента спричиняє обертання планетарної шестірні і другого привідного вала навколо сонячної шестірні. Фіг. 1 - схематична ілюстрація варіанта здійснення системи нанесення покриття згідно з даним винаходом. Фіг. 2 - вигляд в перспективі частини системи нанесення покриття на Фіг. 1. У той час як вище ідентифіковані креслення викладають варіант здійснення винаходу, також розглядаються інші варіанти здійснення, як відмічено в обговоренні. У всіх випадках, це відкриття представляє винахід як представлення, а не обмеження. Потрібно розуміти, що фахівцями в даній галузі техніки можуть бути вигадані численні інші модифікації і варіанти здійснення, які потрапляють в об'єм і суть принципів винаходу. Креслення можуть бути не накреслені за масштабом. Бажано надавати маніпулятор для заготовки для системи нанесення покриття, який надає можливість переміщення заготовки, яке наближається до випадкового переміщення. Більш випадкове переміщення заготовки сприяє більш рівномірному нанесенню покриття і результуючому розподілу товщини. Згідно з даним винаходом, надається маніпуляторний вузол для заготовки, який використовує планетарний рух, щоб забезпечувати псевдо- або близьке до випадкового переміщення деталі, щоб забезпечувати бажаний розподіл покриття. Система даного винаходу може бути використана, щоб забезпечувати нанесення методом електроннопроменевого фізичного осадження з парової фази (EP-PVD) покриттів, що утворюють тепловий бар'єр (ТВС), на компоненти газотурбінного двигуна, а також забезпечувати множину інших типів матеріалів для покриттів за допомогою множини інших способів нанесення покриття на бажані заготовки. Було виявлено, що переміщення механізмів доставки покриття (наприклад, розбризкувачів покриття для використання з великими заготовками) може створювати небажані потокові ефекти в трубках для подачі матеріалу. Отже, поліпшена маніпуляція деталлю згідно з даним винаходом без залежності від маніпуляції механізмом доставки покриття надає можливість 1 UA 113384 C2 5 10 15 20 25 30 35 40 45 50 55 узгодженого нанесення покриття незалежно від конкретних механізмів доставки покриття. Різні ознаки і переваги даного винаходу будуть оцінені звичайними фахівцями в даній галузі техніки, беручи до уваги креслення і опис, який йде далі. Фіг. 1 - схематична ілюстрація варіанта здійснення системи 10 нанесення покриття, а Фіг. 2 вигляд в перспективі частини системи 10 нанесення покриття. В ілюстрованому варіанті здійснення система 10 включає в себе маніпуляторний вузол 11, який включає в себе привідний вал 12, сонячну шестірню 14, планетарну шестірню 16, привідний вал 18, конічні шестерні 20 і 22, опорний вал (або шпиндель) 24, фіксатор 26, привідний вал 28, ведучу шестірню 30, шестірню 32 несучого елемента на корпус 34 несучого елемента і корпус 36. Маніпуляторний вузол 11 може бути використаний, щоб утримувати і маніпулювати заготовкою 38 (наприклад, дублетом крильчатки газотурбінного двигуна) для нанесення покриття, що надається джерелом 40 покриття. Частини або весь маніпуляторний вузол 11, заготовки 38 і джерело 40 покриття можуть бути розташовані всередині кожуха 42. В одному варіанті здійснення зубчата передача, утворена маніпуляторним вузлом 11, може бути сконфігурована таким чином. Привідний вал 12 прикріплюється з можливістю обертання до сонячної шестірні 14 для загального обертання навколо осі А. Сонячна шестірня 14 зачіплюється з планетарною шестірнею 16, так що обертання сонячної шестірні 14 спричиняє обертання планетарної шестірні 16. В одному варіанті здійснення передавальне відношення, приблизно дорівнює 2,5:1, може бути використане між планетарною шестірнею 16 і сонячною шестірнею 14, хоча будь-яке бажане передавальне відношення може бути використане в альтернативних варіантах здійснення. Привідний вал 18 прикріплюється з можливістю обертання до планетарної шестірні 16 і повертається разом з планетарною шестірнею 16. Привідний вал 18 розміщується паралельно привідному валу 12. Конічна шестірня 20 прикріплюється до привідного вала 18, а конічна шестірня 22 прикріплюється до опорного вала 24. Конічні шестірні 20 і 22 зачіпляються одна з одною, щоб передавати крутний момент між привідним валом 18 і опорним валом 24. Фіксатор 26 підтримується на далекому кінці опорного вала 24, протилежному конічній шестірні 22. Вал 28 розміщується паралельно і поруч з валом 12. Ведуча шестірня 30 прикріплюється з можливістю обертання до вала 28 для загального обертання. Шестірня 32 несучого елемента може підтримуватися з можливістю обертання на валу 12 навколо осі А, при цьому шестірня 32 несучого елемента сконфігуровані, щоб дозволяти обертання незалежно від вала 12. Ведуча шестірня 30 і шестірня 32 несучого елемента зачіплюються одна з одною, щоб передавати крутний момент. Шестірня 32 несучого елемента прикріплюється з можливістю обертання до корпусу 34 несучого елемента. Привідний вал 12 може пройти крізь корпус 34 несучого елемента, але корпус 34 несучого елемента обертально незалежний від привідного вала 12. Планетарна шестірня 16 підтримується і переміщується за допомогою корпусу 34 несучого елемента, хоча планетарна шестірня 16 може обертатися відносно корпусу 34 несучого елемента. Обертання корпусу 34 несучого елемента навколо осі А примушує планетарну шестірню 16 пересуватися по окружності сонячної шестерні 14 (навколо осі А). Корпус 36 може обгороджувати компоненти маніпуляторного вузла 11, щоб захищати їх від матеріалів покриття і допомагати запобігати накопиченню матеріалу покриття на чутливих шестернях і т. д. вузла 11. Фіксатор 26 може зачіпляти і утримувати щонайменше одну заготовку 38 і може мати будь-яку придатну конфігурацію, щоб захоплювати одну або більше бажаних заготовок. На Фіг. 2, заготовка 38 показана в розібраному вигляді відносно опорного вала 24, і фіксатор 26 опущений для простоти. Як показано у варіанті здійснення на Фіг. 2, заготовкою 38 є "дублет" сегмента крильчатки газотурбінного двигуна, що має пару аеродинамічних профілів 38-1 і 38-2, що проходять між внутрішньою платформою 38-3 і зовнішньою платформою 38-4. Фіксатор 26 підтримує заготовку 38 сегмента крильчатки за допомогою опорного вала 24, спозиціонованого в середній точці, розташованій між аеродинамічними профілями 38-1 і 38-2 і між внутрішньою і зовнішньою платформами 38-3 і 384. Загалом, заготовка 38 може бути розташована відносно опорного вала 24, щоб забезпечувати оптимальне позиціонування в межах прямої видимості відносно однієї або більше осей переміщення і джерела 40 покриття. Джерелом 40 покриття може бути EB-PVD-вузол з накопичувачем 40-1 матеріалу, який може утворювати струмінь 40-2 пари покриття, спрямований на заготовку 38. Будь-який традиційний EB-PVD-вузол може бути використаний. В ілюстрованому варіанті здійснення струмінь 40-2 покриття може пройти до заготовки 38 в напрямку, загалом, перпендикулярному осі А і узгодженому з площиною, в якій несучий важіль 24 рухається, для того, щоб доставляти матеріал покриття, що випаровується на заготовку 38. Звичайні фахівці в даній галузі техніки повинні розуміти, що EB-PVD-система, описана в даному документі, є тільки одним прикладом 2 UA 113384 C2 5 10 15 20 25 30 35 40 45 50 55 60 конфігурації джерела 40 покриття, і в альтернативному варіанті здійснення можуть бути використані інші типи технологій доставки покриття і систем. Кожух 42 може бути передбачений, щоб оточувати щонайменше частину маніпуляторного вузла 11, заготовку 38 і джерело 40 покриття. Потрібно розуміти, що частини цих компонентів, особливо частини маніпуляторного вузла 11 і джерела 40 покриття, можуть пройти за межі кожуха 42. Під час роботи крутний момент може вибірково надаватися привідним валам 12 і 28, щоб забезпечувати обертальний вхідний вплив маніпуляторному вузлу 11. Один або більше традиційних електромоторів або інші механізми (не показані) можуть бути використані, щоб надавати вхідний крутний момент привідним валам 12 і 28, які можуть обертатися незалежно з однаковою швидкістю або різними швидкостями. Привідний вал 12 обертає сонячну шестірню 14 навколо осі А. Сонячна шестірня 14 передає крутний момент планетарній шестірні 16, яка примушує відповідний привідний вал 18 обертатися. Конічні шестерні 20 і 22 передають крутний момент від вала 18 опорному валу 24, який обертається навколо осі В, перпендикулярної осі А. Крім того, привідний вал 18 обертає ведучу шестірню 30, яка зачіпляє шестірню 32 несучого елемента, таким чином, повертаючи корпус 34 несучого елемента. Планетарна шестірня 16 і привідний вал 18, а також опорний вал 24 і заготовка 38, яка переноситься на кінці опорного вала 24, рухаються по окружності сонячної шестірні 14 за допомогою обертання корпусу 34 несучого елемента навколо осі А. Матеріал покриття може бути доставлений з джерела 40 покриття, доки виконується маніпулювання заготовкою 38 за допомогою маніпулюючого вузла 11. Маніпулювання вузла 11 має тенденцію спричиняти безперервне обертальне переміщення внутрішньої і зовнішньої платформ 38-3 і 38-4 заготовки 38 навколо осі В з додатковим обертанням (що включає в себе орбітальне переміщення) відносно осі А. Переміщення заготовки 38 надає можливість струменю 40-2 покриття мати тенденцію фокусуватися на аеродинамічних профілях 38-1 і 38-2 і сусідніх поверхнях платформ 38-3 і 38-4, в той же час зменшуючи величину покриття, спрямованого на поверхні платформ 38-3 і 38-4, які не межують з маршрутом потоку. Потрібно зазначити, що окрема орієнтація заготовки 38 відносно струменя 40-2 покриття, показана на Фіг. 2, буде виникати тільки на мить під час операції. Загалом, переміщення заготовки 38, поки маніпуляторний вузол 11 працює, наближається або майже відповідає випадковому переміщенню. Також потрібно зазначити, що переміщення при маніпулюванні може бути відрегульоване, щоб включати в себе години витримування, під час яких переміщення заготовки 38 сповільнюється або зупиняється, щоб збільшувати піддавання впливу струменя 40-2 покриття в окремій орієнтації. Потрібно розуміти, що точна орієнтація заготовки на даному опорному валу, а також кути маніпулювання і години витримування, можуть регулюватися за бажанням для окремих застосувань, щоб оптимізувати товщину покриттів і мікроструктуру покриття (наприклад, вертикальні стовпи) у важких для нанесення покриття областях. Орієнтація заготовки керується щонайбільше конфігурацією заготовки, і кути маніпулювання і позиції зупинки можуть бути пріоритезовані за допомогою величини покриття, необхідної в кожній області в окремій частині (наприклад, де більше теплового захисту необхідно, більше ТВС наноситься). Наприклад, в деяких варіантах здійснення, більше покриття може бути нанесено на внутрішню платформу, ніж на зовнішню платформу сегмента крильчатки газотурбінного двигуна, оскільки внутрішня платформа нагрівається більше, ніж зовнішня платформа, під час роботи двигуна. Будь-які відносні вирази або вирази міри, що використовуються в даному документі, такі як "значною мірою", "приблизно", "переважно", "загалом "і т.п., повинні інтерпретуватися згідно з і керуючись будь-якими застосовними визначеннями або обмеженнями, точно встановленими в даному документі. У всіх випадках, будь-які відносні вирази або вираження міри, що використовуються в даному документі, повинні інтерпретуватися, щоб широко охоплювати будь-які доречні розкриті варіанти здійснення, а також такі діапазони або варіації, які будуть зрозумілі звичайному фахівцеві в даній галузі техніки, беручи до уваги повноту даного відкриття, наприклад, охоплювати звичайні різновиди виробничого допуску і т. п. У той час як винахід було описано з посиланням на зразковий варіант(и) здійснення, фахівцям в даній галузі техніки буде зрозуміло, що різні зміни можуть бути зроблені, а еквіваленти можуть бути використані замість його елементів, без відступу від рамок винаходу. Крім того, множина модифікацій може бути виконана, щоб пристосувати конкретну ситуацію або матеріал до ідеї винаходу без відступу від його основної області застосування. Наприклад, маніпулятор для заготовки, згідно з даним винаходом, може бути використаний разом з маніпуляцією подачею покриття і може бути використаний з множиною різних типів покриттів і механізмів доставки покриття. Більше того, в додаткових варіантах здійснення, один або більше додаткових несучих важелів з додатковими асоційованими планетарними шестернями, валом і 3 UA 113384 C2 5 конічними шестернями можуть зачіплятися з сонячною шестірнею, щоб підтримувати і маніпулювати додатковими заготовками одночасно. Отже, передбачається, що винахід не повинен обмежуватися окремим розкритим варіантом(ами) здійснення, і що винахід буде включати в себе всі варіанти здійснення, що потрапляють в рамки прикладеної формули винаходу. ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 35 40 45 50 55 1. Система нанесення покриття, що містить: планетарний маніпуляторний вузол, який містить: перший привідний вал, здатний одержувати обертальний вхідний вплив, сонячну шестірню, прикріплену з можливістю обертання до першого привідного вала для обертання разом з ним, планетарну шестірню, зачеплену з сонячною шестірнею, другий привідний вал, прикріплений з можливістю обертання до планетарної шестірні для обертання разом з нею, так що крутний момент передається від сонячної шестірні планетарній шестірні, щоб обертати другий привідний вал, опорний вал, функціонально зчеплений з другим привідним валом, при цьому опорний вал розміщений, по суті, перпендикулярно другому привідному валу, корпус несучого елемента, що підтримує планетарну шестірню відносно сонячної шестірні, при цьому корпус несучого елемента виконаний з можливістю обертання навколо спільної осі з сонячною шестірнею, і при цьому обертання корпусу несучого елемента спричиняє обертання планетарної шестірні і другого привідного вала навколо сонячної шестірні, третій привідний вал, виконаний з можливістю одержання обертального вхідного впливу, і ведучу шестірню, прикріплену з можливістю обертання до третього привідного вала для обертання разом з ним, при цьому обертання ведучої шестірні спричиняє обертання корпусу несучого елемента, і джерело покриття, розташоване в функціональній близькості з планетарним маніпуляторним вузлом. 2. Система за п. 1, в якій перший привідний вал і другий привідний вал розміщені паралельно один одному. 3. Система за п. 1, в якій перший привідний вал і третій привідний вал розміщені паралельно один одному. 4. Система за п. 1, яка додатково містить: шестірню несучого елемента, прикріплену з можливістю обертання до корпусу несучого елемента і зачеплену з ведучою шестірнею. 5. Система за п. 4, в якій шестірня несучого елемента підтримується з можливістю обертання на першому привідному валу і здатна обертатися незалежно від першого привідного вала. 6. Система за п. 1, яка додатково містить: конічні шестерні, які забезпечують обертальне зчеплення між другим привідним валом і опорним валом. 7. Система за п. 1, яка додатково містить: фіксатор для підтримування заготовки, прикріплений до опорного вала. 8. Система за п. 7, яка додатково містить: заготовку сегмента крильчатки газотурбінного двигуна, що має пару аеродинамічних профілів, які проходять між внутрішньою платформою і зовнішньою платформою, при цьому фіксатор підтримує заготовку сегмента крильчатки за допомогою опорного вала планетарного маніпуляторного вузла, спозиціонованого в середній точці, розташованій між аеродинамічними профілями і між внутрішньою і зовнішньою платформами. 9. Система за п. 1, що додатково містить: корпус маніпулятора для захисту компонентів планетарного маніпуляторного вузла від матеріалу покриття з джерела покриття. 10. Система за п. 1, в якій джерело покриття містить вузол електронно-променевого фізичного осадження з парової фази. 11. Спосіб нанесення покриття на заготовку, що містить етапи, на яких: обертають сонячну шестірню навколо першої осі, обертають планетарну шестірню і привідний вал, використовуючи сонячну шестірню, обертають опорний вал, використовуючи планетарну шестірню і привідний вал, при цьому опорний вал обертається навколо другої осі, яка перпендикулярна першій осі, 4 UA 113384 C2 5 10 15 20 25 30 35 40 45 обертають корпус несучого елемента, щоб переміщувати планетарну шестірню і привідний вал по окружності сонячної шестірні, підтримують заготовку на дальньому кінці опорного вала, і доставляють матеріал покриття на заготовку. 12. Спосіб за п. 11, в якому матеріал покриття доставляється в напрямку, по суті, перпендикулярному першій осі. 13. Система нанесення покриття, що містить: планетарний маніпуляторний вузол, який містить: перший привідний вал, виконаний з можливістю одержання обертального вхідного впливу, сонячну шестірню, прикріплену з можливістю обертання до першого привідного вала для обертання разом з ним, планетарну шестірню, зачеплену з сонячною шестірнею, другий привідний вал, прикріплений з можливістю обертання до планетарної шестірні для обертання разом з нею, так що крутний момент передається від сонячної шестірні до планетарної шестірні, щоб обертати другий привідний вал, при цьому перший привідний вал і другий привідний вал розміщені паралельно один одному, опорний вал, функціонально зчеплений з другим привідним валом, при цьому опорний вал розміщений, по суті, перпендикулярно другому привідному валу, конічні шестерні, які забезпечують обертальне зчеплення між другим привідним валом і опорним валом, корпус несучого елемента, що підтримує планетарну шестірню відносно сонячної шестірні, при цьому корпус несучого елемента виконаний з можливістю обертання навколо спільної осі з сонячною шестірнею, і при цьому обертання корпусу несучого елемента спричиняє обертання планетарної шестірні і другого привідного вала навколо сонячної шестірні, третій привідний вал, виконаний з можливістю одержання обертального вхідного впливу, при цьому перший привідний вал і третій привідний вал розміщені паралельно один одному, ведучу шестірню, прикріплену з можливістю обертання до третього привідного вала для обертання разом з ним, при цьому обертання ведучої шестірні спричиняє обертання корпусу несучого елемента, і шестірню несучого елемента, прикріплену з можливістю обертання до корпусу несучого елемента і зачеплену з ведучою шестірнею, і джерело покриття, розташоване в функціональній близькості з планетарним маніпуляторним вузлом. 14. Система за п. 13, в якій шестірня несучого елемента підтримується з можливістю обертання на першому привідному валу і здатна обертатися незалежно від першого привідного вала. 15. Система за п. 13, яка додатково містить: фіксатор для підтримування заготовки, прикріплений до опорного вала. 16. Система за п. 15, яка додатково містить: заготовку сегмента крильчатки газотурбінного двигуна, що має пару аеродинамічних профілів, які проходять між внутрішньою платформою і зовнішньою платформою, при цьому фіксатор підтримує заготовку сегмента крильчатки за допомогою опорного вала планетарного маніпуляторного вузла, спозиціонованого в середній точці, розташованій між аеродинамічними профілями і між внутрішньою і зовнішньою платформами. 17. Система за п. 13, яка додатково містить: корпус маніпулятора для захисту компонентів планетарного маніпуляторного вузла від матеріалу покриття з джерела покриття. 18. Система за п. 13, в якій джерело покриття містить вузол електронно-променевого фізичного осадження з парової фази. 5 UA 113384 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори російськоюNeal James W.
МПК / Мітки
МПК: F16H 1/28, C25D 19/00, C23C 26/00, B05B 13/02
Мітки: нанесення, покриття, маніпулятор
Код посилання
<a href="https://ua.patents.su/8-113384-manipulyator-dlya-nanesennya-pokrittya.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор для нанесення покриття</a>
Пристрій для вакуумного нанесення покриття

Номер патенту: 41837
Опубліковано: 10.06.2009
Автор: Воронін Андрій Григорович
МПК: C23C 14/32, C23C 14/00
Мітки: пристрій, нанесення, покриття, вакуумного
Формула / Реферат:
Установка для вакуумного нанесення покриття, що містить вакуумну камеру, рухливий елемент, що містить привід для переміщення, вакуумний насос, вакуумні трубопроводи, блок живлення, яка відрізняється тим, що як привід для рухливого елемента використовується кроковий двигун, причому у вакуумній камері розташовані електроди іонно-плазмового очищення та система наповнення робочим газом.
Установка для нанесення тонкого покриття на гнучку рухому підкладку
Номер патенту: 108585
Опубліковано: 12.05.2015
Автори: Яцульчак Галина Володимирівна, Суберляк Олег Володимирович, Мельник Юрій Ярославович
МПК: B05D 1/00, B29C 41/00, B05C 3/00
Мітки: нанесення, гнучку, покриття, рухому, тонкого, підкладку, установка
Формула / Реферат:
Установка для нанесення тонкого покриття на гнучку рухому підкладку, яка містить вузол розмотування гнучкої підкладки, формувальний пристрій з привідним барабаном, вузли висушування та намотування композиційної плівки і направляючі ролики між ними, а також живильну ємність, яка відрізняється тим, що формувальний пристрій виконаний у вигляді ванни, по всій ширині якої встановлений привідний барабан, оснащеної бар'єром, виконаним з можливістю...
Пристрій для нанесення покриття на вироби зі скла
Номер патенту: 27569
Опубліковано: 12.11.2007
Автори: Борулько Павло Вікторович, Зуділов Борис Вікторович, Борулько Віктор Іванович
МПК: C03C 17/25
Мітки: нанесення, скла, пристрій, вироби, покриття
Формула / Реферат:
Пристрій для нанесення покриття на вироби зі скла, що містить робочу камеру, який відрізняється тим, що має рухому допоміжну камеру, яка з'єднана з робочою камерою гнучким шлангом для переливання плівкоутворювального розчину, покажчики рівня розчину, електродвигун та редуктор, через який обертання передається на ходовий гвинт, який забезпечує піднімання та опускання допоміжної камери, що приводить до перетікання плівкоутворювального розчину з...
Пристрій для нанесення покриття на металеву поверхню
Номер патенту: 36448
Опубліковано: 27.10.2008
Автори: Міхальцов Ігор Валентинович, Шанюк Ольга Василівна
МПК: B05C 9/00
Мітки: нанесення, покриття, поверхню, металеву, пристрій
Формула / Реферат:
Пристрій для нанесення покриття на металеву поверхню, що містить ванну для деталей, на які наноситься покриття, та нагріваючий пристрій, який відрізняється тим, що нагріваючий пристрій виконано у вигляді двох електродів, при цьому катодом є деталь, на яку наносять покриття, а анодом - метал, що наноситься на поверхню деталі, який закріплений в тримачі і виконаний з можливістю переміщення вздовж осі деталі.
Композиція покриття, яка містить полісечовину, спосіб нанесення покриття та основа з нанесеною композицією покриття

Номер патенту: 93303
Опубліковано: 25.01.2011
Автори: Сенкфор Ховард Л., Марц Джонатан Т., Баранчик Стівен В., Хоксвендер Томас Р., Амброуз Роналд Р., Фюрар Джон
МПК: C09D 175/00
Мітки: композицією, яка, композиція, основа, нанесення, нанесеною, спосіб, містить, покриття, полісечовину
Формула / Реферат:
1. Композиція покриття, яка містить полісечовину, одержану з реакційної суміші, яка містить:a) перший компонент, який містить ізоціанат; іb) другий компонент, який містить амін/(мет)акрилатний олігомерний продукт реакції між поліаміном, полі(мет)акрилатом і моно(мет)акрилатом або моноаміном.2. Композиція покриття за п. 1, яка відрізняється тим, що співвідношення еквівалентів ізоціанатних груп і еквівалентів амінових груп...
Попередній патент: Терапевтичний агент для лікування тривожних розладів
Випадковий патент: Спосіб одержання a-(2,4-дисульфофеніл)-n-трет-бутилнітрону та його солей