Пристрій контролю положення рівня розплаву в пристрої управління ростом монокристалів
Номер патенту: 114450
Опубліковано: 10.03.2017
Автори: Єпіфанов Юрій Михайлович, Суздаль Віктор Семенович, Стрельніков Микола Іванович, Тавровський Ігор Ігорович
Формула / Реферат
Пристрій контролю положення рівня розплаву в пристрої управління ростом монокристалів, що містить механічно зв'язані між собою щуп з енкодером і електродвигун із системою управління, яка містить блок обробки даних, контролер управління електродвигуном і логічну схему визначення контакту щуп-розплав з дискретними входами/виходами, при цьому логічна схема містить лічильник імпульсів для обробки двох імпульсних послідовностей ![]() ,
, ![]() сигналів із енкодера, при цьому перший вихід логічної схеми підключено до входу контролера, другий вхід з'єднаний з першим виходом схеми визначення контакту щуп-розплав і першим входом контролера управління електродвигуном, перший вхід/вихід блока обробки даних пов'язаний із системою управління ростом монокристала, щуп електрично зв'язаний із логічною схемою визначення контакту щуп-розплав, а вихід енкодера підключений до першого входу логічної схеми, який відрізняється тим, що логічна схема як лічильник імпульсів містить квадратурний лічильник, на перші дискретні входи логічної схеми додатково введено дві інверсні послідовності
сигналів із енкодера, при цьому перший вихід логічної схеми підключено до входу контролера, другий вхід з'єднаний з першим виходом схеми визначення контакту щуп-розплав і першим входом контролера управління електродвигуном, перший вхід/вихід блока обробки даних пов'язаний із системою управління ростом монокристала, щуп електрично зв'язаний із логічною схемою визначення контакту щуп-розплав, а вихід енкодера підключений до першого входу логічної схеми, який відрізняється тим, що логічна схема як лічильник імпульсів містить квадратурний лічильник, на перші дискретні входи логічної схеми додатково введено дві інверсні послідовності ![]() ,
, ![]() сигналів А та В із енкодера, блок обробки даних додатково містить мікроконтролер, перші входи/виходи якого з'єднано з логічною схемою, запам'ятовуючий пристрій, інтерфейс та дисплей, при цьому другий вихід логічної схеми з'єднано зі схемою визначення контакту щуп-розплав.
сигналів А та В із енкодера, блок обробки даних додатково містить мікроконтролер, перші входи/виходи якого з'єднано з логічною схемою, запам'ятовуючий пристрій, інтерфейс та дисплей, при цьому другий вихід логічної схеми з'єднано зі схемою визначення контакту щуп-розплав.
Текст
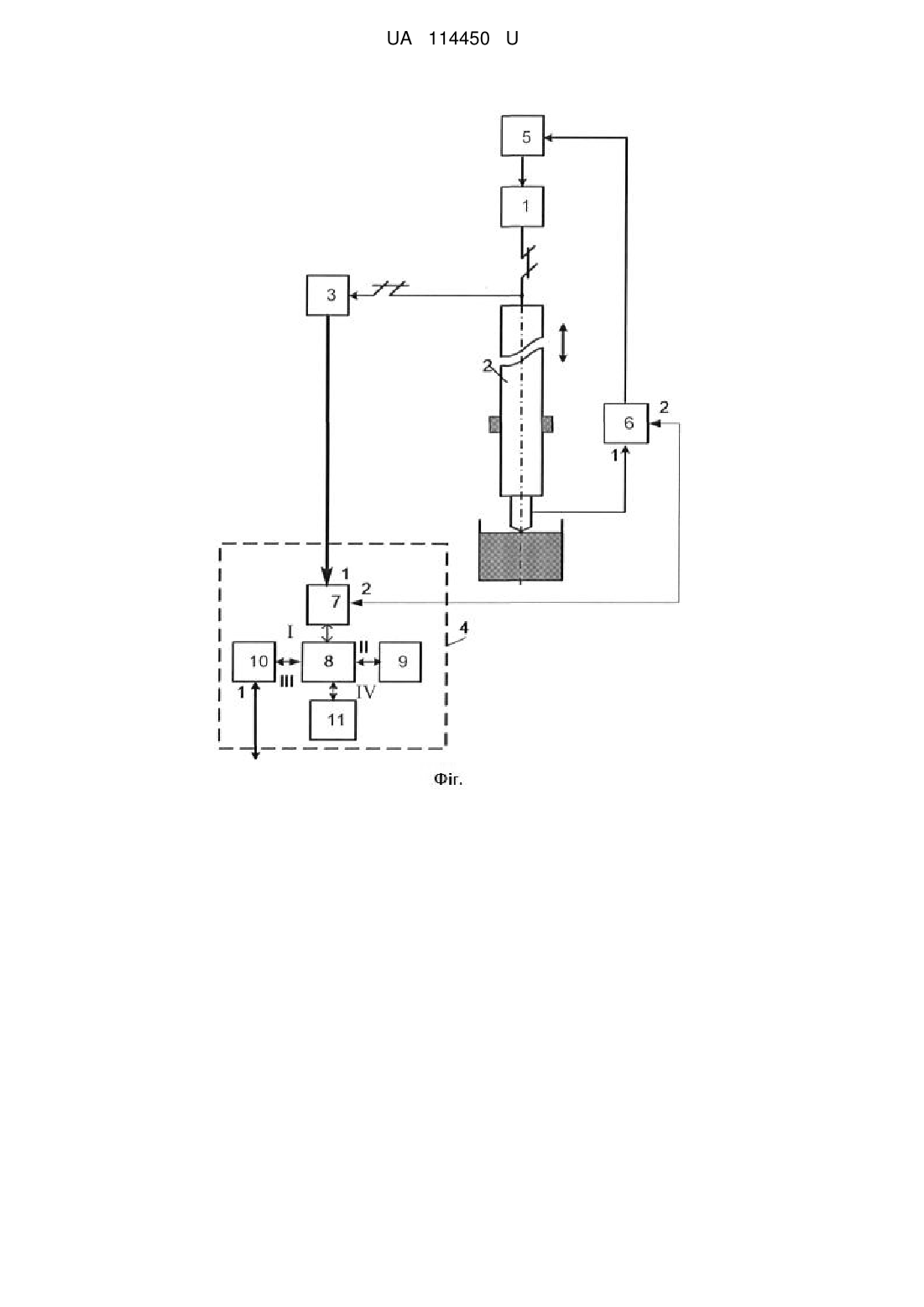
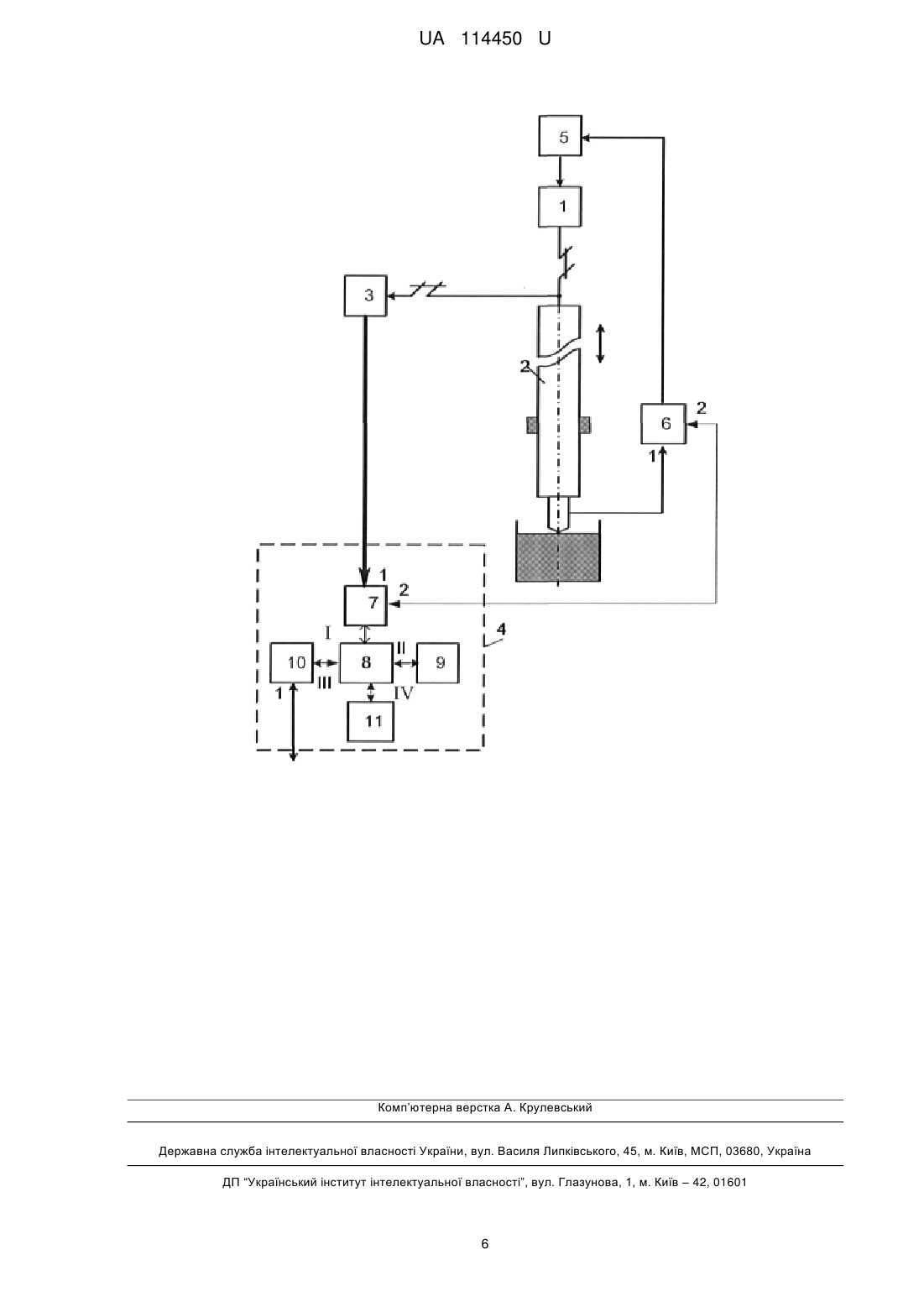
Реферат: Пристрій контролю положення рівня розплаву в пристрої управління ростом монокристалів, що містить механічно зв'язані між собою щуп з енкодером і електродвигун із системою управління, яка містить блок обробки даних, контролер управління електродвигуном і логічну схему визначення контакту щуп-розплав з дискретними входами/виходами, при цьому логічна схема містить лічильник імпульсів для обробки двох імпульсних послідовностей UA , UB сигналів із енкодера, при цьому перший вихід логічної схеми підключено до входу контролера, другий вхід з'єднаний з першим виходом схеми визначення контакту щуп-розплав і першим входом контролера управління електродвигуном, перший вхід/вихід блока обробки даних пов'язаний із системою управління ростом монокристала, щуп електрично зв'язаний із логічною схемою визначення контакту щуп-розплав, а вихід енкодера підключений до першого входу логічної схеми. Логічна схема як лічильник імпульсів містить квадратурний лічильник, на перші дискретні входи логічної схеми додатково введено дві інверсні послідовності U A , UB сигналів А та В із енкодера, блок обробки даних додатково містить мікроконтролер, перші входи/виходи якого з'єднано з логічною схемою, запам'ятовуючий пристрій, інтерфейс та дисплей, при цьому другий вихід логічної схеми з'єднано зі схемою визначення контакту щуп-розплав. UA 114450 U (12) UA 114450 U UA 114450 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до пристроїв контролю положення рівня розплаву для управління процесом вирощування монокристалів (МК) та може знайти застосування у виробництві великогабаритних лужно-галоїдних сцинтиляційних МК. Актуальність задачі обумовлена необхідністю безперервного моніторингу величини змінення рівня розплаву та одержанню достовірної інформації щодо положення рівня у процесі регулювання системою управління (СУ) ростом діаметра МК. Відомий пристрій визначення положення об'єкта для управління виконавчим механізмом [Висам Аль-Тибби, Александр Поздняков. Подключение инкрементного енкодера к ПЛК. Аппаратные средства. Датчики. СТА 1/2015. с. 76-83], що містить програмувальний логічний контролер (ПЛК), енкодер (датчик кута повороту), з'єднаний з дискретними входами ПЛК, функціональні блоки високошвидкісних лічильників (до 6-ти лічильників, в тому числі режимі роботи Х4). ПЛК дозволяє забезпечити роботу лічильників, з'єднаних з енкодером, незалежно від основної програми, контролюючи їхні виходи за допомогою підпрограми обробки переривань, які активізуються у випадках збігу поточного значення лічильника з уставкою (встановлений сигнал при якому відбувається апаратне переривання), та також при скиданні значень лічильника або при зміні напрямку лічення. Основним недоліком наведеного пристрою, незважаючи на його універсальність, багатофункціональність та простоту забезпечення лічення імпульсів від енкодеру, є його значна вартість, що призводить до виникнення проблем при закупівлі, обслуговуванні, ремонті цієї техніки під час контролю положення рівня розплаву в процесі вирощування МК. Відомий пристрій для контролю положення рівня розплаву під час вирощування МК методом Чохральского [пат. Україна № 77882, G01F 23/24, С30В 15/20], що містить щуп з датчиком його переміщень (енкодер) і електродвигун із системою управління, яка включає блок обробки даних, контролер та схему визначення контакту щуп-розплав, перший і другий вихід якої підключені, відповідно, до входу контролера та до другого входу блока обробки даних, перший вхід якого з'єднаний з датчиком переміщень щупа, а вихід зв'язаний із системою управління ростом монокристала, при цьому щуп електрично зв'язаний зі схемою визначення контакту щупрозплав. У пристрій введено нульовий покажчик, механічно зв'язаний з валом датчика переміщень, а визначник положення нульового покажчика розташований на нерухливій частині пристрою, при цьому перший вихід нульового покажчика підключений до другого входу контролера, а його другий вихід, що забезпечує початок відліку, з'єднаний із третім входом блока обробки даних. Недоліком цього пристрою є значна погрішність результатів вимірювання рівня розплаву під час вирощування МК, яка пов'язана з коливаннями розплаву з частотою 1,0-5,0 рад/с під час обертання тигля, витягування кристала із заданою швидкістю, швидкого дискретного підйому кристала з розплаву на малу величину та зміні теплових режимів росту. При цьому збільшується число помилкових змін станів сигналів енкодера, що приводить до зниження обґрунтованості керуючих дій СУ, які впливають на сталість діаметра МК, внаслідок чого знижується і якість МК. Відомий пристрій контролю положення рівня розплаву в пристрої управління ростом монокристалів під час вирощування МК методом Кіропулоса [Пат. Україна № 97602, G01F 23/24, С30В 15/20, G05D 27/00], що містить механічно зв'язані між собою щуп з датчиком його переміщень (енкодер) і електродвигун із системою управління, що включає блок обробки даних, контролер управління електродвигуном та схему визначення контакту щуп-розплав, перший вихід якої підключений до першого входу контролера, перший вхід/вихід блока обробки даних зв'язаний із системою управління ростом монокристала, при цьому щуп електрично зв'язаний зі схемою визначення контакту щуп-розплав. Пристрій також містить логічну схему, реверсивний лічильник імпульсів, при цьому вихід датчика переміщень щупа підключений до першого входу логічної схеми для обробки двох імпульсних послідовностей UA , UB сигналів А і В з енкодера, другий вхід якої з'єднаний з першим виходом схеми визначення контакту щуп-розплав і першим входом контролера управління електродвигуном, перший і другий виходи логічної схеми з'єднані із входами прямого і зворотного лічення реверсивного лічильника, відповідно, його третій вхід з'єднаний із другим виходом схеми визначення контакту щуп-розплав, а вихід - з другим входом блока обробки даних, при цьому вихід блока обробки даних підключений до другого входу контролера. Основним недоліком наведеного пристрою є низька точність енкодера, який підключено для управління пристроєм контролю положення рівня розплаву, що обумовлено низькими функціональними можливостями логічної схеми та блока обробки даних, та призводить до виникнення помилок під час обробки двох імпульсних послідовностей UA , UB сигналів А і В з енкодера та зниження точності вимірювання рівня розплаву. 1 UA 114450 U 5 10 15 20 25 30 35 40 45 50 55 Як прототип нами вибраний останній з аналогів. В основу корисної моделі поставлена задача збільшення точності результатів вимірювання рівня розплаву шляхом розширення функціональних можливостей блока обробки даних за рахунок вдосконалення пристрою контролю положення рівня. Поставлена задача вирішується тим, що пристрій контролю положення рівня розплаву в пристрої управління ростом монокристалів, що містить механічно зв'язані між собою щуп з енкодером і електродвигун із системою управління, яка включає блок обробки даних, контролер управління електродвигуном і логічну схему визначення контакту щуп-розплав з дискретними входами/виходами, яка містить лічильник імпульсів для обробки двох імпульсних послідовностей UA , UB сигналів із енкодера, при цьому перший вихід логічної схеми підключено до входу контролера, другий вхід з'єднаний з першим виходом схеми визначення контакту щуп-розплав і першим входом контролера управління електродвигуном, перший вхід/вихід блока обробки даних пов'язаний із системою управління ростом монокристала, щуп електрично зв'язаний із логічною схемою визначення контакту щуп-розплав, а вихід енкодера підключений до першого входу логічної схеми, згідно корисної моделі, логічна схема як лічильник імпульсів містить квадратурний лічильник, на перші дискретні входи логічної схеми додатково заведено дві інверсні послідовності U A , UB сигналів А та В із енкодера, блок обробки даних додатково містить мікроконтролер, перші входи/виходи якого з'єднано з логічною схемою, запам'ятовуючий пристрій, інтерфейс та дисплей, при цьому другий вихід логічної схеми з'єднано зі схемою визначення контакту щуп-розплав. Введення двох додаткових інверсних послідовностей U A , UB сигналів А та В із енкодера до перших дискретних входів логічної схеми, дозволяє підключити в цій схемі квадратурний лічильник, який має збільшену учетверо точність, що забезпечує в процесі лічення імпульсів реєстрацію зміни станів по чотирьох фронтах обох сигналів (передній фронт сигналу А, передній фронт сигналу В, задній фронт сигналу А, задній фронт сигналу В) енкодера та підвищує точність вимірів шляхом проведення додаткової обробки даних вимірювання рівня розплаву. Додаткова обробка дозволяє визначати значення квадратурного лічильника як середню величину за зазначений інтервал часу, що зменшує погрішність, тобто залежність від коливань та вібрації поверхні розплаву. Введення додатково в блок обробки даних мікроконтролера, перші входи/виходи якого з'єднані з логічною схемою, запам'ятовуючого пристрою, інтерфейса та дисплея дозволяє управляти квадратурним лічильником із заданою періодичністю t, незалежно від виконання програми та робочого циклу мікроконтролера та від основної програми пристрою управління ростом МК СУ. Це дозволяє забезпечити зняття інформації з входів квадратурного лічильника, виконання програми додаткової обробки масиву даних та запису в запам'ятовуючий пристрій значень з виходів квадратурного лічильника та узгоджує видачу енкодером чотирьох послідовностей імпульсів та опитування усіх входів/виходів квадратурного лічильника мікроконтролером, що виключає порушення робочого циклу мікроконтролера та підвищує точність вимірювання рівня розплаву. З'єднання другого виходу логічної схеми зі схемою визначення контакту щуп-розплав, а саме з контролером управління електродвигуном, забезпечує підтримку режиму відривторкання щупом розплаву під час переміщення щупа в процесі вирощування МК. Таке з'єднання логічної схеми дозволяє виключити погрішності результатів від хвильових коливань поверхні розплаву, що значно підвищує точність вимірювання рівня розплаву. Таке поєднання додаткових елементів блока обробки даних із заданим циклом управління ростом МК забезпечує формування вибірки значень вимірювань рівня розплаву (n елементів) у вимірювальному циклі, виконання основної обробки масиву даних з перевіркою їх на виключення грубих погрішностей, запис в запам'ятовуючий пристрій знайдених значень для наступного циклу, реєстрацію на дисплеї вимірюваних величин рівня в стандартних одиницях масштабування М, що дозволяє значно підвищити точність вимірювання рівня розплаву. У таблиці наведена порівняльна оцінка точності вимірювання параметрів запропонованого пристрою та прототипу під час вирощування МК. На кресленні наведена схема пристрою контролю положення рівня розплаву в пристрої управління ростом монокристалів, що пропонується. Пристрій контролю положення рівня розплаву містить електродвигун 1, щуп 2, енкодер 3, блок обробки даних 4, контролер 5 управління електродвигуном 1, схему визначення контакту щуп-розплав 6. Блок обробки даних 4 містить логічну схему 7 для підключення енкодера 3, мікроконтролер 8, запам'ятовуючий пристрій 9, інтерфейс 10, дисплей 11. Пристрій також містить тигель з розплавом. 2 UA 114450 U Перші дискретні входи логічної схеми 7 з'єднані з імпульсними послідовностями UA , UB , 5 10 15 20 25 30 35 40 45 50 55 U A , UB вихідних сигналів А та В із енкодера 3. Перші (позначено римською цифрою) та другі дискретні входи/виходи логічної схеми 7 з'єднані з мікроконтролером 8 та через схему визначення контакту щуп-розплав 6 з контролером 5 управління електродвигуном 1, відповідно. Другий, третій та четвертий вхід/вихід мікроконтролера 8, з'єднаний із запам'ятовуючим пристроєм 9, інтерфейсом 10 та дисплеєм 11, відповідно. Перший вхід/вихід інтерфейсу 10 підключений до СУ процесом росту МК (на Фіг. не наведено). Механічно електродвигун 1 зв'язаний із щупом 2 та енкодером 3, при цьому щуп 2 електрично з'єднаний із першим входом схеми 6 визначення контакту щуп-розплав. Конструктивно пристрій контролю виконаний у вигляді вимірювального модуля, що містить електронну плату із сукупності елементів, у герметичному корпусі, розташований у безпосередній близькості з механічним вузлом переміщення щупа 2 ростової установки. Енкодер 3 - перетворювач кутових переміщень, типу ЛІР-5000. Контролер 5 управління електродвигуном 1, типу Lenze 8200 Vector. Механічне з'єднання вала електродвигуна 1, через черв'ячну передачу (не показано) з валом енкодера 3, здійснено через гнучку муфту без пружних деформацій між ними. Дискретні вводи/виводи логічної схеми 7, а також квадратурний лічильник, виконані на основі програмувальної логічної інтегральної схеми (ПЛІС) - матриці програмувальних внутрішніх з'єднань, типу ALTERA МАХ ЕРМЗ 128. Мікроконтролер 8, який по перших входах/виходах здійснює управління квадратурним лічильником - AVR Atmega 1281 сімейства Mega компанії Atmel. Інтерфейс 10, який забезпечує внутрішній зв'язок елементів конфігурації пристрою контролю, а також із системою управління ростом монокристала двонаправленою напівдуплексною лінією передачі даних, обумовленої стандартом RS - 485 (ЕІА/ТІА) або по Ethernet, виконано на мікросхемах. Входи/виходи мікроконтролера 8 на кресленні позначено римськими цифрами. Робота пристрою контролю положення рівня розплаву в пристрої управління ростом МК під час вирощування методом Кіропулоса наведено на наступному приладі. Попередньо встановлюють: - Tц - вимірювальний цикл пристрою контролю, рівний циклу управління (у діапазоні T ц=Tц упр.=(6-10) хв.) з циклом tц у=(3,5-5,0) з режиму відрив-торкання щупом розплаву під час переміщення щупа (у контролері 5 управління електродвигуном 1); - hэ=(4,0-4,5) мм - експериментальне отримане значення для кожної ростової установки значення змінення рівня розплаву на один оберт вала енкодера із числом періодів Nb=KNi (К =1 - коефіцієнт інтерполяції, Ni=5000 - число штрихів кругового растра) вихідних сигналів А та В; - М - величина масштабування значення hэ= 4 мм (для конкретної установки вирощування МК) змінення рівня розплаву, дорівнюється М=hэ/Ni=7,998е-4 мм/імпульс - міра змінення рівня, яка співвіднесена до одного імпульсу (зазначено у запам'ятовуючому пристрої 9); - t=(0,01; 0,1; 1) с - періодичність незалежної роботи квадратурного лічильника, розташованого в логічної схемі 7 блока 4, для розшифровки кожного періоду змінення сигналів енкодера 3, збільшеною учетверо точністю (режим Х4). У пристрої управління вирощуванням МК (регулятор діаметра СУ, на Фіг. не показано) попередньо задають технологічні та параметри управління: - dк = (440-460) мм - діаметр МК (розрощення, протягом 30-35 годин, починаючи від затравочного кристала діаметром dз=100-120 мм); - Dт=590 мм - діаметр тигля, - Нт=275 мм - висота тигля; L - h S=60-70 мм - висота кристала по центру частини, яка знаходиться під розплавом (після затравлення та розрощення кристала по діаметру до dк); L - Lк=200-220 мм - довжина МК після вирощування (включаючи h S); - в=0,5 мм/год. - швидкість витягування кристала діаметром dк; - р=2,0 мм/год. - швидкість росту кристала (сумарна - =в+р=2,5 мм/год); - Нну=220-225 мм - початковий рівень розплаву в тиглі діаметром Dт перед затравленням; - Нку=70 мм - кінцевий рівень розплаву в тиглі після відриву вирощеного МК; - y=1,95-2,05 мм/год. - швидкість зниження повної величини падіння ΔНу = Нну - Нку = 150155 мм рівня Ну розплаву в ростовому циклі, під час управлінням вирощуванням МК цезію йодистого, активованого натрієм [CsI(Na)] методом Кіропулоса, який має діаметр 450 мм та L довжину 200 мм (h S=70 мм). 3 UA 114450 U 5 10 15 20 25 30 35 40 45 50 55 60 Вводять у контролер 8 блока 4 обробки даних стандартні пакети прикладних програм MathCAD, Matlab, для опису випадкової величини вимірюваного рівня Ну, нормальним законом розподілу Гауса, а також програми з перевіркою на відхилення від швидкості змінення вимірюваної величини. Організують зв'язок пристрою контролю із пристроєм управління ростом кристалів, для виводу з періодичністю T ц, оброблений квадратурним лічильником логічної схеми 7, керованого мікроконтролером 8, зв'язаний за третім входом/виходом з інтерфейсом 10 сигнал, з першого входу/виходу 10. Включення пристрою контролю оператор виконує після затравлення МК і початку розрощення цього кристала до заданого діаметра. Із надходженням сигналу вимірювального циклу Tц=Tц упр.=6 хв. із запам'ятовуючого пристрою 9 або від зовнішньої СУ, мікроконтролер 8 дає дозвіл на переміщення в режимі відрив-торкання розплаву щупом 2 зі встановленим циклом tц у=5,0 с. Сигнал дозволу надходить із другого входу/виходу логічної схеми 7 та схему 6 визначення контакту щуп-розплав на вхід контролера 5 управління електродвигуном 1. Логічна схема 7 у процесі переміщення щупа 2 із циклом tц у на перший вхід приймає чотири послідовності імпульсів сигналів А та В із енкодера 3, підключених до входів квадратурного лічильника, у режимі Х4 роботи та напрямку лічення, узгодженого з напрямком руху щупа. Незалежне лічення імпульсів квадратурним лічильником у першому переміщенні відбувається з періодичністю t=0,01 с. Зняття інформації з входів і виходів квадратурного лічильника та додаткова обробка до першого торкання відкидаються. У результаті, перше торкання розплаву в тиглі та надходження сигналу на другий вхід/вихід логічної схеми 7 від схеми 6 визначення контакту щуп-розплав викликає переривання для контролю квадратурного лічильника за першим входом/виходом мікроконтролера 8. За станом виходів лічильника після виконання додаткової обробки (середнє значення як за інтервал часу t) визначається первісне та всі послідовні положення рівня, які записуються за другим входом/виходом у запам'ятовуючий пристрій 9 (на випадок відключення живлення або після перезапуску пристрою контролю). Надалі, протягом Tц лічення імпульсів із заданою періодичністю t=0,01 с активізується, тільки при рівності поточного значення лічильника заданому значенню, записаному в 9. До моменту рівності періодичність t становить t=(0,1 або 1) с, залежно від циклу tц у переміщення щупа 2. При цьому на дисплеї 11 за четвертим входом/виходом контролер 8 реєструє початкові (нульові або згідно з показаннями лінійки) та підсумовані значення вимірюваних у процесі росту параметрів: величина зниження рівня Ну в кожному Tц (мм); швидкість зниження рівня y (мм/год.); довжина кристала Lк (мм) шляхом підрахунку контролером 8 числа в розмірності 0,001 мм (величина масштабування М=7,998е-4, записується в 9). Протягом вимірювального циклу T ц=6 хв. та циклу tц у=5,0 с переміщення щупа 2, мікроконтролер 8 формує обсяг вибірки, що складається з n1=72 елементів (кількість вимірів величини Ну в розмірності М) та розміщає масив даних у запам'ятовуючий пристрій 9. По цьому масиві мікроконтролер 8 обчислює параметри вибірки, що має нормально розподілення сигналів рівня, у яких присутні аномальні значення та елементів вибірки моментів часу в T ц. Перевіряє дані на аномальність і виключає грубі погрішності (рівень значимості = 0.01 в 9). Крім того, визначає аномальне змінення рівня розплаву, у результаті якого констатується наявність або відсутність нормальної швидкості змінення рівня. Після додаткової та основної обробки за Tц, мікроконтролер 8 виводить результати на дисплей 11, на якому в режимі меню відображає: обсяг вибірки з n1=72 елементів, середнього та в межах трьох ; значення вибірок з n1×n2 елементів (n2=10 елементів за одну годину) параметру змінення швидкості зниження y рівня розплаву, за кожну з 30 годин розрощення, залежно від номера та часу елемента вибірки. Пристрій контролю положення рівня розплаву сигналізує звуковим сигналом про завершення розрощення кристала після 30 годин розрощування до діаметру dк=450 мм та L значення h S=60 мм по центру підрозплавної частини. Управління процесом вирощування МК після розрощення кристала до заданого діаметра та частини, яка знаходиться під розплавом до заданого значення, забезпечується включенням витягування кристала зі швидкістю в=0,5 мм/год. Початок управління супроводжується надходженням зовнішнього сигналу СУ через інтерфейс 10 або формується самим пристроєм контролю із циклом Tц упр.=6 хв. Основна та додаткова обробка даних вимірювання положення рівня розплаву пристроєм контролю здійснюється в тій же послідовності, що під час розрощення МК. Результати обробки відображаються дисплеєм 11 у вигляді швидкості зниження y рівня розплаву в процесі управління ростом МК, у межах y=(1,995-2,005) мм/год., у розмірності М масштабування, відповідно до завдання швидкості росту кристала р=2,0 мм/год. і його витягуванні зі швидкістю в = 0,5 мм/год. Мікроконтролер 8 передає оброблену інформацію через перший вхід/вихід інтерфейсу 10 у СУ ростом МК, на основі якої в зовнішній системі проводяться керуючі дії на бічному або донному нагрівачі для стабілізації діаметру та швидкості 4 UA 114450 U 5 10 15 20 зниження рівня розплаву. Такі операції контролю рівня розплаву в процесі всього управління ростом МК у циклі T ц упр повторюються доти, поки поточна довжина кристала Lк, не стане L дорівнюватись тій, що задається Lк=200 мм (включаючи h S=60 мм) у запам'ятовуючому пристрої 9. У процесі обробки даних, фільтром видаляються високочастотні, низькочастотні синфазні, диференціальні завади пристрою та помилкові зміни станів сигналів енкодера в місці підключення енкодера 3 до першого входу логічної схеми 7, з'єднаного з контролером 8. Будьякий шум, що залишився, видаляється фільтром на першому вході/виході інтерфейсу 10 під час передачі в СУ обробленого сигналу та затримки на реєстрацію дисплеєм 11 відображуваних параметрів. Використання других методів вирощування МК здійснюється аналогічно з урахуванням відповідних параметрів вирощування. Як видно з таблиці, пристрій контролю положення рівня розплаву, що заявляється, дозволив виключити погрішності від хвильових коливань поверхні розплаву, завдяки універсальному підходу до обробки сигналів енкодера. Висока роздільна здатність пристрою дозволила в 2-3 рази підвищити точність розрощення МК від моменту затравлення dз до діаметра dк. При цьому час виконання операції розрощення МК скоротився на 5 годин у порівнянні із прототипом, як наслідок, витрати енергії ростової установки знизилися на 16,7 %. Таким чином, використання пристрою контролю положення рівня розплаву, що заявляється, із зовнішньою системою управління ростом МК вирощування підвищує точність визначення керуючих дій на процес росту МК, а саме підвищується якість управління діаметром МК, як наслідок поліпшується якість вирощуваних монокристалів. Таблиця Параметр Величина масштабування, мм / імпульс діаметр dк=450 мм; L висота підрозплавної частини МК h S=60 мм; зниження рівня розплаву за час розрощення МК, hу=(5,240-5,260) мм; y зниження рівня розплаву в процесі управління СУ, y=(1,995-2,005) мм/год.; довжина вирощеного МК, Lк=200 мм Точність вимірювання, % Прототип Пристрій, що заявляється Не вимірялась 0,001 ±1,5 ±0,5 ±4,0 ±1,0 відсутність контролю ±0,1 відсутність контролю ±0,25 відсутність контролю ±1,0 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Пристрій контролю положення рівня розплаву в пристрої управління ростом монокристалів, що містить механічно зв'язані між собою щуп з енкодером і електродвигун із системою управління, яка містить блок обробки даних, контролер управління електродвигуном і логічну схему визначення контакту щуп-розплав з дискретними входами/виходами, при цьому логічна схема містить лічильник імпульсів для обробки двох імпульсних послідовностей UA , UB сигналів із енкодера, при цьому перший вихід логічної схеми підключено до входу контролера, другий вхід з'єднаний з першим виходом схеми визначення контакту щуп-розплав і першим входом контролера управління електродвигуном, перший вхід/вихід блока обробки даних пов'язаний із системою управління ростом монокристала, щуп електрично зв'язаний із логічною схемою визначення контакту щуп-розплав, а вихід енкодера підключений до першого входу логічної схеми, який відрізняється тим, що логічна схема як лічильник імпульсів містить квадратурний лічильник, на перші дискретні входи логічної схеми додатково введено дві інверсні послідовності U A , UB сигналів А та В із енкодера, блок обробки даних додатково містить мікроконтролер, перші входи/виходи якого з'єднано з логічною схемою, запам'ятовуючий пристрій, інтерфейс та дисплей, при цьому другий вихід логічної схеми з'єднано зі схемою визначення контакту щуп-розплав. 5 UA 114450 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 27/00, C30B 15/20, G01F 23/24
Мітки: пристрій, розплаву, управління, положення, монокристалів, пристрої, ростом, рівня, контролю
Код посилання
<a href="https://ua.patents.su/8-114450-pristrijj-kontrolyu-polozhennya-rivnya-rozplavu-v-pristro-upravlinnya-rostom-monokristaliv.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю положення рівня розплаву в пристрої управління ростом монокристалів</a>
Пристрій контролю положення рівня розплаву в пристрої управління ростом монокристалів

Номер патенту: 97602
Опубліковано: 27.02.2012
Автори: Тавровський Ігор Ігорович, Соболєв Олександр Вікторович, Стрельніков Микола Іванович, Тимошенко Микола Миколайович, Суздаль Віктор Семенович, Єпіфанов Юрій Михайлович
МПК: C30B 15/20, G01F 23/24, G05D 27/00
Мітки: монокристалів, положення, пристрій, контролю, управління, ростом, рівня, пристрої, розплаву
Формула / Реферат:
Пристрій контролю положення рівня розплаву в пристрої управління ростом монокристалів, що містить механічно зв'язані між собою щуп з датчиком його переміщень і електродвигун із системою управління, яка включає блок обробки даних, контролер управління двигуном і схему визначення контакту щуп-розплав, перший вихід якої підключений до першого входу контролера, перший вхід/вихід блока обробки даних пов'язаний із системою управління ростом...
Пристрій для контролю положення рівня розплаву
Номер патенту: 77882
Опубліковано: 15.01.2007
Автори: Єпіфанов Юрій Михайлович, Герасимчук Лариса Іванівна, Тавровський Ігор Ігорович, Суздаль Віктор Семенович, Стрельніков Микола Іванович, Артеменко Максим Петрович, Гриньов Борис Вікторович, Горілецький Валентин Іванович
МПК: G01F 23/24, C30B 15/20
Мітки: пристрій, рівня, контролю, положення, розплаву
Формула / Реферат:
Пристрій для контролю положення рівня розплаву, що містить щуп з датчиком його переміщень та електродвигун із системою керування, що включає блок обробки даних, контролер та схему визначення контакту щуп-розплав, перший та другий вихід якої підключені, відповідно, до входу контролера та до другого входу блока обробки даних, перший вхід якого з'єднаний з датчиком переміщень щупа, а вихід зв'язаний із системою керування ростом монокристала, при...
Пристрій для контролю положення рівня розплаву
Номер патенту: 78074
Опубліковано: 15.02.2007
Автори: Єпіфанов Юрій Михайлович, Гриньов Борис Вікторович, Горілецький Валентин Іванович, Стрельніков Микола Іванович, Тавровський Ігор Ігорович, Суздаль Віктор Семенович, Герасимчук Лариса Іванівна, Гущін Анатолій Михайлович
МПК: G01F 23/24, C30B 15/20
Мітки: положення, пристрій, розплаву, рівня, контролю
Формула / Реферат:
Пристрій для контролю положення рівня розплаву, що містить електродвигун із системою керування, щуп та датчик його лінійних переміщень, який відрізняється тим, що в нього введено блок обробки даних і використано лінійний електродвигун, жорстко і вертикально встановлений на кришці ростової камери, а система керування двигуном містить контролер, перший та другий виходи якого підключені до відповідних якірних обмоток, а третій його вихід...
Пристрій для управління процесом росту монокристалів з розплаву в ампулі
Номер патенту: 97932
Опубліковано: 26.03.2012
Автори: Єпіфанов Юрій Михайлович, Будаковський Сергій Валентинович, Демченко Вячеслав Васильович, Козьмін Юрій Семенович, Суздаль Віктор Семенович
МПК: G05D 27/00, C30B 15/20, C30B 11/00, C30B 35/00
Мітки: росту, розплаву, монокристалів, пристрій, ампулі, процесом, управління
Формула / Реферат:
Пристрій управління процесом росту монокристалів з розплаву в ампулі, що містить вертикальну піч із нагрівачах у верхній і нижньої її зонах, ампулу із речовиною, що кристалізується, у вигляді циліндра з конічним дном, термопари, установлені на зазначених нагрівачах, регулятори зворотного зв'язку по температурі нагрівачів верхньої й нижньої зони печі, підключені до відповідних термопар і самих нагрівачів, блок програмно-логічного управління й...
Датчик контролю рівня розплаву в плавильній печі

Номер патенту: 81207
Опубліковано: 10.12.2007
Автори: Макаренко Олександр Іванович, Валявін Сергій Михайлович, Шиман Ігор Олексійович, Неклеса Анатолій Тимофійович
МПК: C22B 9/16, G01F 23/24
Мітки: контролю, датчик, рівня, розплаву, плавильній, печі
Формула / Реферат:
1. Датчик контролю рівня розплаву в плавильній печі, що містить електроди з електроізоляційними прокладками, установлені по висоті печі на заданому рівні від поду на відстані один від іншого, джерело постійного струму, який відрізняється тим, що додатково оснащений загальним електродом, яким служить корпус плазмотрона непрямої дії, встановленого у бічній стінці печі, а електроди виконані у вигляді окремих водоохолоджуваних трубок П-подібного...