Спосіб управління сільськогосподарською машиною та пристрій для настройки сенсора
Формула / Реферат
1. Спосіб управління сільськогосподарською машиною з урахуванням робочої кромки поля, що включає операції формування сигналу за допомогою сенсорного блока, встановленого на сільськогосподарській машині і автоматично настроюваного на еталонну уставку, причому даний сигнал несе інформацію про розташування робочої кромки поля; передавання вказаного сигналу на блок регулювання виконавчими механізмами сільськогосподарської машини; обробки сигналу вказаним блоком для формування управляючої команди; управління роботою сільськогосподарської машини вздовж робочої кромки поля відповідно до управляючої команди, яка сформована блоком регулювання виконавчими механізмами.
2. Спосіб за п. 1, який відрізняється тим, що додатково включає електронну настройку сенсорного блока у відповідь на сигнал сенсора.
3. Спосіб за п. 1, який відрізняється тим, що додатково включає первинну настройку сенсорного блока за еталонною уставкою.
4. Спосіб за п. 1, який відрізняється тим, що додатково включає відображення інформації, яку несе сигнал сенсорного блока.
5. Спосіб за п. 4, який відрізняється тим, що додатково включає операцію, при якій виконують індикацію позиції сенсорного пристрою відносно до заданого коректного стану.
6. Спосіб за п. 5, який відрізняється тим, що включає корегування сигналу сенсорного блока у відповідь на відображену інформацію.
7. Пристрій для настройки сенсора, що має перший елемент для розміщення сенсора, причому сенсор змонтований на даному елементі, перший елемент виконаний з можливістю повороту і приєднаний до другого елемента, другий елемент і перший елемент мають можливість відносного повороту навколо спільної осі для забезпечення настройки у першій площині, другий елемент рухомо сполучений з третім елементом для забезпечення настройки у другій площині, причому друга площина розташована перпендикулярно першій площині, а третій елемент є несучим елементом, при цьому перший і другий елементи обладнані селективним кріпильним засобом для селективного звільнення і фіксації відносного поворотного руху першого і другого елементів для забезпечення першої еталонної уставки при фіксації, другий і третій елементи обладнані селективним роз'єднувачем для селективного звільнення і фіксації положення другого елемента відносно третього елемента для забезпечення другої еталонної уставки при фіксації, крім того, перша і друга еталонні уставки забезпечують настройку сенсора, змонтованого на пристрої.
8. Пристрій за п. 7, який відрізняється тим, що має засіб для встановлення несучого елемента на сільськогосподарській машині.
9. Пристрій за п. 7, який відрізняється тим, що перший елемент виконаний у вигляді першого затискача U-подібної форми, вільні кінці якого включають взаємно відцентровані (вирівняні) отвори, а другий елемент виконаний у вигляді другого затискача U-подібної форми, вільні кінці якого включають взаємно відцентровані отвори, причому отвори першого і другого затискачів U-подібної форми визначають спільну вісь першого і другого елементів.
10. Пристрій за п. 9, який відрізняється тим, що перший і другий затискачі U-подібної форми утворюють простір для розміщення сенсорного пристрою.
11. Пристрій за п. 9, який відрізняється тим, що другий затискач U-подібної форми виконаний з можливістю повороту і приєднаний до третього елемента, а третій елемент виконаний у вигляді поздовжнього несучого важеля.
12. Пристрій за п. 9, який відрізняється тим, що третій елемент виконаний у вигляді поперечного несучого важеля.
13. Пристрій за п. 8, який відрізняється тим, що несучий елемент змонтований на сільськогосподарській машині таким чином, що даний елемент розміщено над сільськогосподарською машиною і поширюється у напрямку руху зазначеної сільськогосподарської машини.
14. Пристрій за п. 12, який відрізняється тим, що додатково містить підпірний важіль, що приєднаний до несучого важеля.
15. Пристрій за п. 7, який відрізняється тим, що має змонтований на ньому сенсор для формування сигналу для контролера.
16. Пристрій за п. 15, який відрізняється тим, що контролер має засіб для порівняння сигналу, що надходить від сенсора, з сигналом, який несе збережену інформацію, а також засіб для формування управляючого сигналу, що керує роботою сільськогосподарської машини.
17. Пристрій за п. 16, який відрізняється тим, що сільськогосподарська машина виконана регулюючою управляючим сигналом.
18. Пристрій за п. 14, який відрізняється тим, що додатково має засіб дистанційного управління для регулювання позиції сенсорного пристрою.
19. Пристрій за п. 15, який відрізняється тим, що має пристрій для візуального відображення інформації, яка надходить від сенсора.
20. Пристрій за п. 19, який відрізняється тим, що контролер обладнаний електронними засобами для настройки сенсора.
Текст
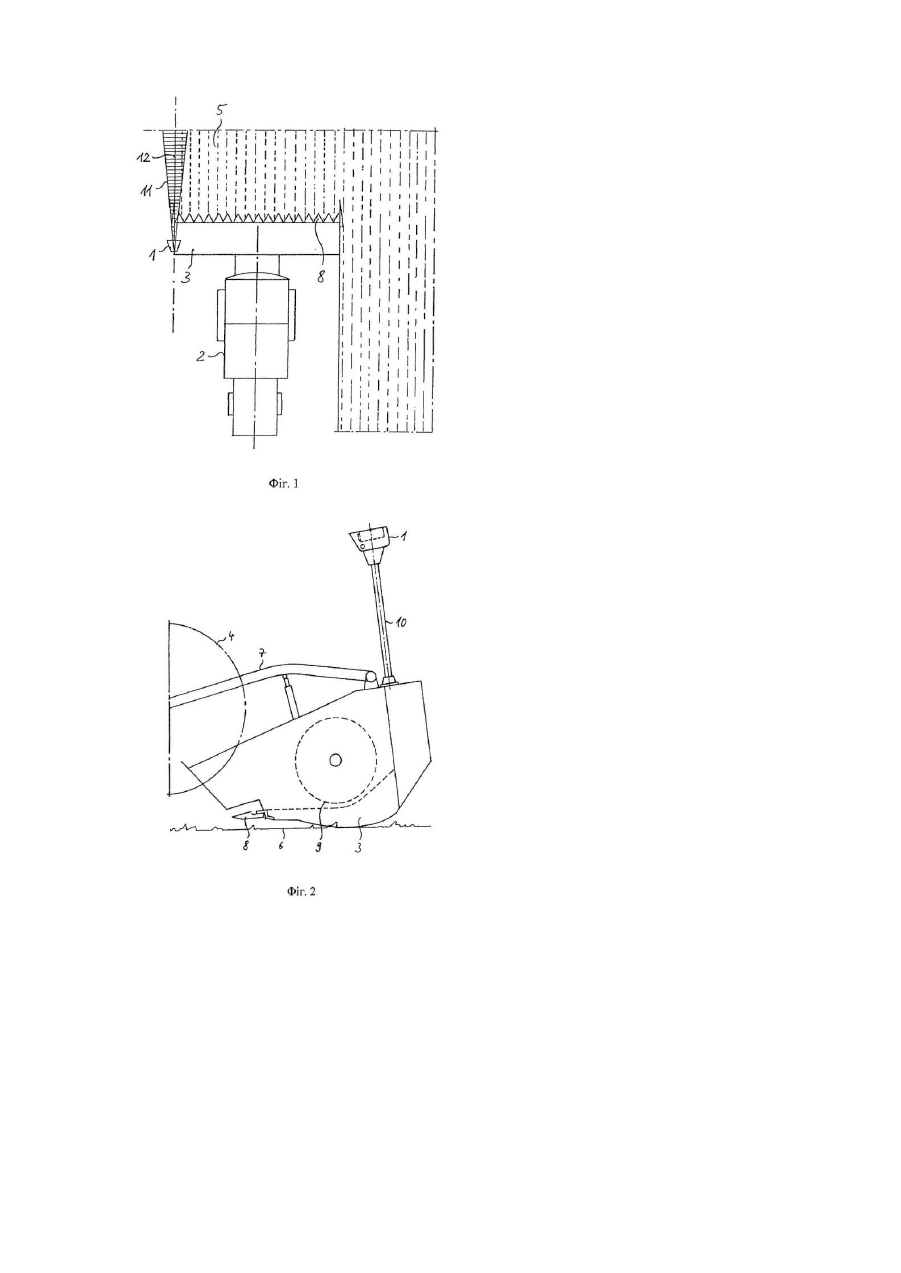
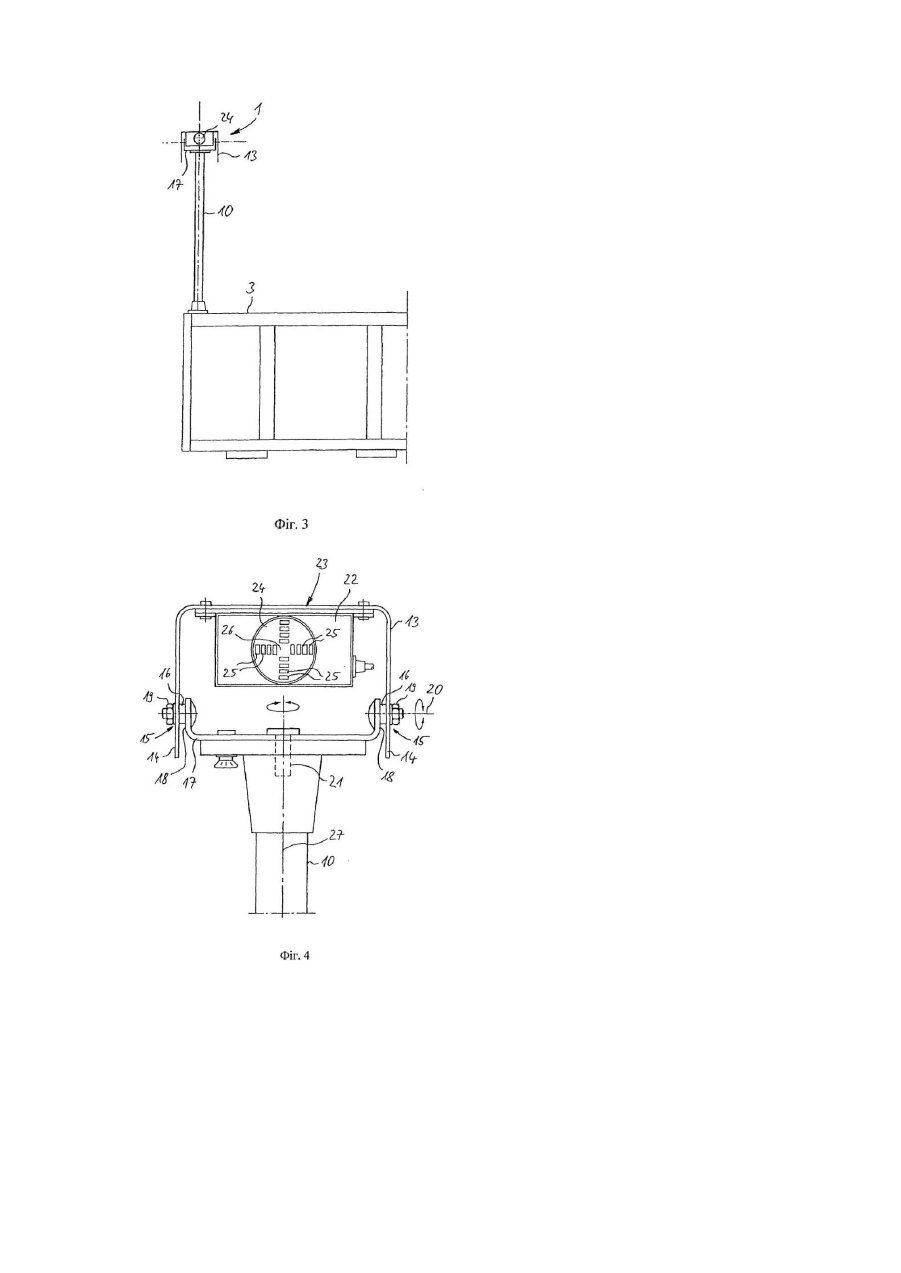
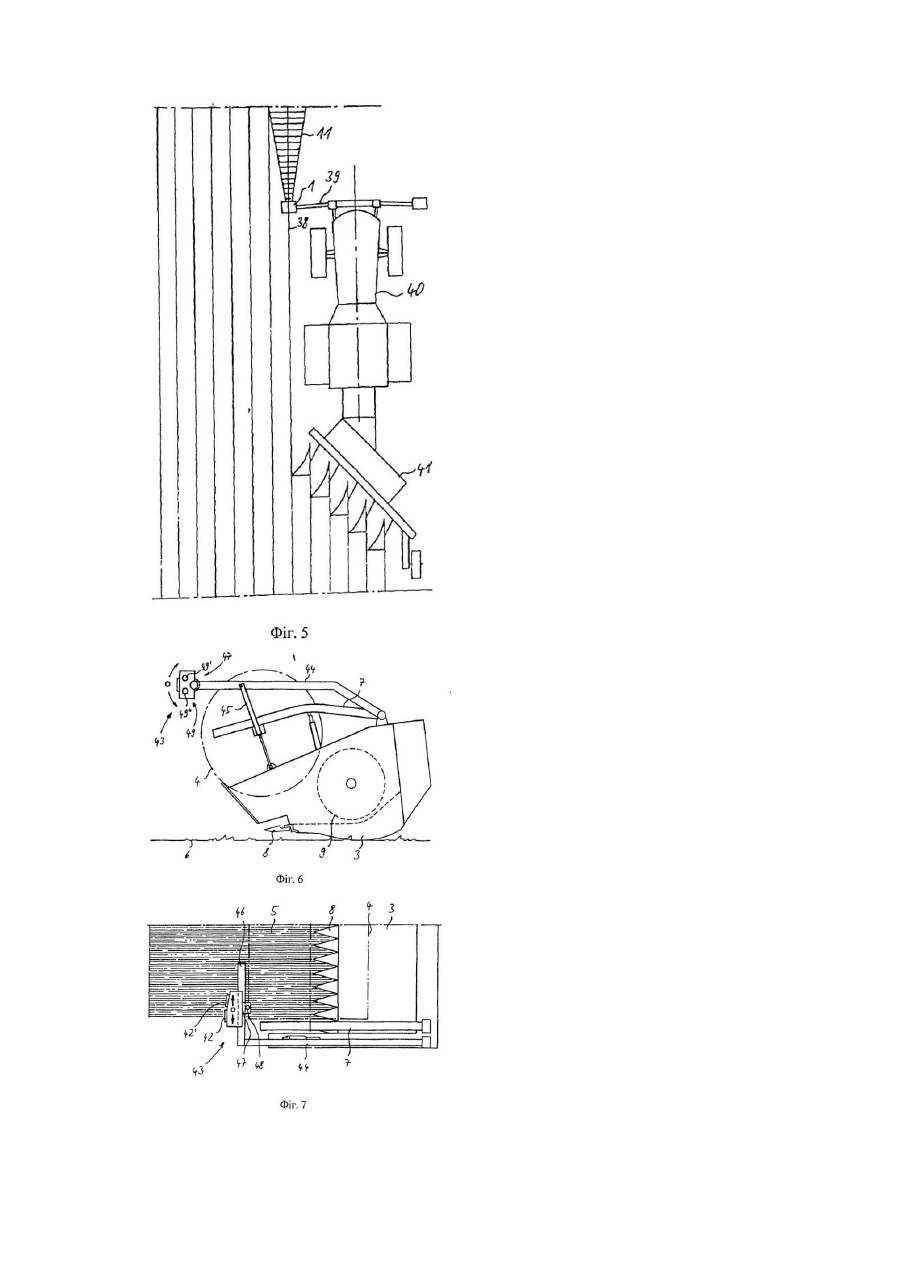
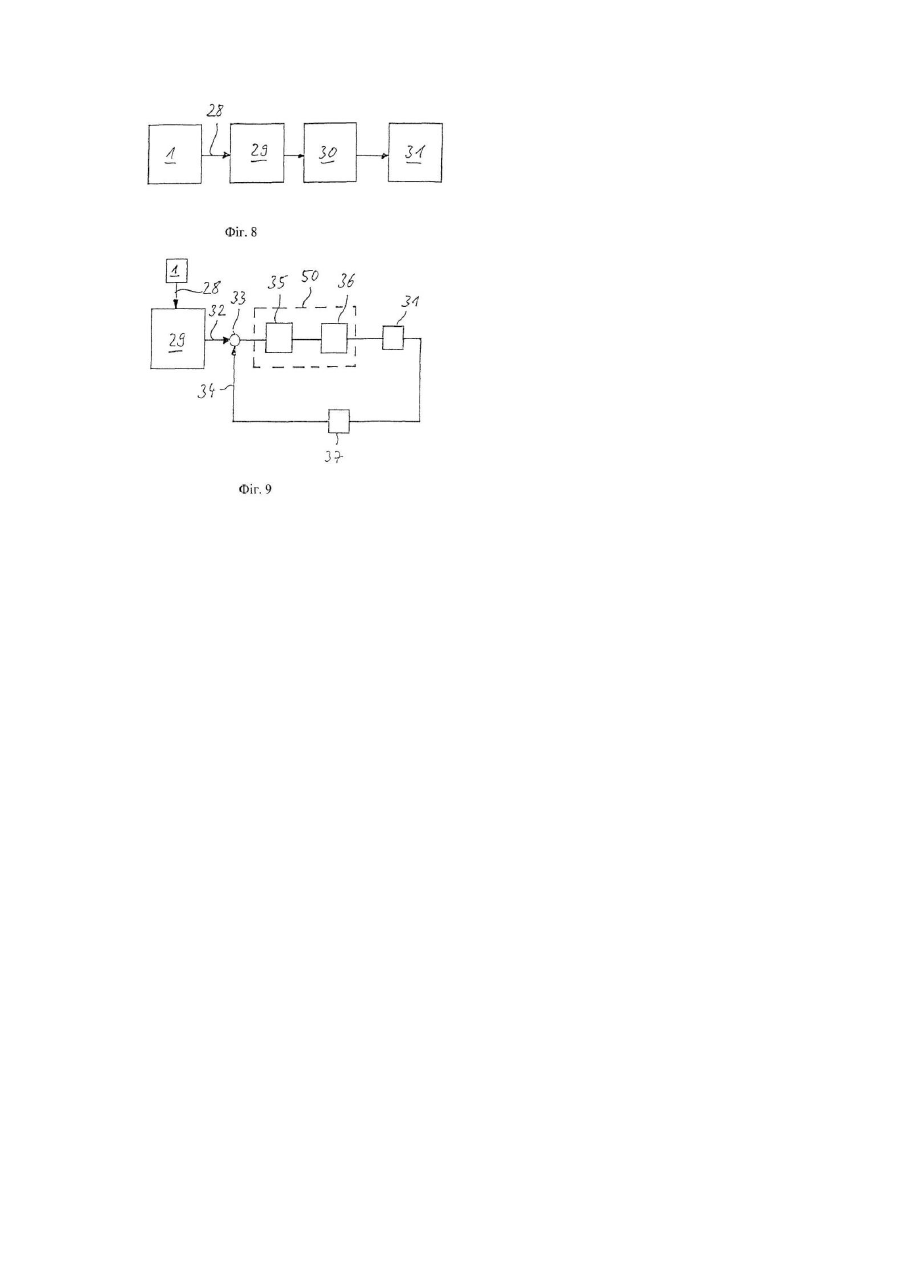
Винахід стосується способу юстирування (настроювання) прикріпленого до польової машини сенсорного блока за основним пунктом 1 формули винаходу та юстирувального пристрою (пристрою для настроювання) основним пунктом 6 формули винаходу. З опису патенту США US-PS 3 991 618 відомо пристрій для розпізнавання краю оброблюваного поля, в якого сенсорний блок має велику кількість сенсорів, що розподілені в зоні підлоги зернозбиральної машини та в декількох місцях прикріплені до неї. Сенсори знаходяться частково в передньому кінці, частково в задньому кінці зернозбиральної машини. Сенсори утворені як стичні сенсори на кронштейні з чутливим елементом, який має наявність або відсутність збираної продукції. Утворюваний сенсорами сенсорний сигнал діє на блок регулювання ручним управлінням, який забезпечує самостійний рух зернозбиральної машини уздовж краю оброблюваного поля. Недоліком відомого пристрою є те, що передбачена велика кількість розташованих у різноманітних місцях сенсорів, так що пристрій є відносно дорогим. В результаті механічних навантажень сенсори зазнають небажаного зносу. Внаслідок розташування сенсорів у безпосередній близькості від підлоги існує ризик, що сенсори можуть зазнавати пошкоджень в результаті непередбачених зовнішніх впливів. Тому завдання даного винаходу полягає в тому, щоб спосіб юстирування прикріпленого до польової машини сенсорного блока подати таким чином, щоб положення юстирування сенсорного блока можна було б розпізнавати та встановлювати найпростішим способом. Для вирішення цього завдання спосіб відповідно до винаходу має ознаки, зазначені в пункті 1 формули винаходу. Особлива перевага способу відповідно до винаходу полягає в тому, що встановлення положення юстирування сенсорного блока може бути визначене найпростішим способом за допомогою застосовуваних з іншою метою електронних засобів. З цією метою до сенсорного блока підключені виконавчі механізми, за допомогою яких сенсорний блок може переміщатися в горизонтальному і/або вертикальному напрямку. Ці виконавчі механізми завантажуються від центрального блока обробки даних. У цьому блоці обробки даних обробляється виданий сенсорним блоком сенсорний сигнал і в залежності від цього працює далі сенсорний блок, поки в результаті виявлення базової точки або базової лінії не досягається положення юстирування. В результаті удосконалення способу блок індикації служить для контролю положення юстирування , що приймається. Поле індикації і розташування елементів індикації блока індикації налаштовані на відносне положення польової машини стосовно краю оброблюваного поля таким чином, що положення юстирування розпізнається завдяки відповідності налаштованого сенсорним сигналом елемента індикації з попередньо заданим сигналом упізнання. Настроєні елементи індикації сигналізують про актуальні ділянки грунту, що охоплюються сенсорним блоком. Сигнал упізнання сигналізує завдяки відзначеній базовій точці і базовій лінії про положення юстирування сенсорного блока. Переважно сигнал упізнання знаходиться в центральній зоні блока індикації, так що положення юстирування розпізнається і перевіряється просто. Завдання даного винаходу полягає, крім того, у тому, щоб вказати для сенсорного блока юстирувальний пристрій, який дозволяє просто і надійно здійснити тривале фіксування сенсорного блока відносно базової точки польової машини. Для вирішення цього завдання юстирувальний пристрій відповідно до винаходу має ознаки, зазначені в пункті 6 формули винаходу. Перевага юстирувального пристрою відповідно до винаходу полягає зокрема в тому, що завдяки наявності оптичного блока індикації юстирування сенсорного блока на польовій машині здійснюється дуже просто. Після удосконалення юстирувального пристрою блок індикації має декілька розташованих у ряд елементів індикації, причому щонайменше два ряди елементів індикації дистанціюються один від одного. Запропоноване положення сенсорного блока задане тоді, коли звернені один до одного кінцевими сторонами елементи індикації рядів починають світитися. Запропоноване положення сенсорного блока показує таким чином завдяки елементам індикації, що елементи індикації, які світяться, віддалені один від одного на незначній за можливості відстані. Після удосконалення винаходу ряди елементів індикації відповідають кількості можливих напрямів переміщення сенсорного блока. При комбінації регулювання в горизонтальній площині з одного боку та у вертикальній площині з іншого боку утворюються відповідно два компоненти руху, що символізовані відповідно рядом елементів індикації. Після удосконалення юстирувального пристрою сенсорний блок можна регулювати через U-подібну насадку на консолі, змонтованій на польовій машині в його положенні. Завдяки осьовому розташуванню отворів або засобів кріплення біля протилежних кінців U-подібної насадки можливе однозначне і надійне переміщення навколо утвореної в такий спосіб поворотної осі. Оскільки сенсорний блок має U-подібну насадку, ця насадка разом з підтримувальним кронштейном може утворювати порожнистий простір, в якому розташований і захищений від впливів погоди сенсорний блок. Після удосконалення юстирувального пристрою сенсорний блок розташований з можливістю перекручування коаксіально до прямо встановленої консолі зернозбиральної машини, причому щонайменше один ряд елементів індикації простягається в осьовому напрямку до консолі. Завдяки цьому полегшується узгодження з напрямком руху і тим самим зняття показань з блока індикації. Після удосконалення юстирувального пристрою сенсорний блок кріпиться та утримується на пролягаючому поперечно до напрямку руху підтримувальному кронштейні. При розчіплюванні сенсорного блока його можна одночасно переміщати прямолінійно уздовж підтримувального кронштейна та провертати навколо нього. Наступні переваги винаходу наведені в інших додаткових пункта х формули винаходу. Два приклади здійснення винаходу більш докладно пояснюються нижче за допомогою креслень. На кресленнях показані: на фіг. 1 - горизонтальна проекція зернозбиральної машини з сенсорним блоком під час збирання врожаю, на фіг. 2 - вигляд збоку сенсорного блока, прикріпленого на різальному механізмі зернозбиральної машини відповідно до першого прикладу здійснення, на фіг. 3 - вигляд ззаду сенсорного блока відповідно до фіг. 2, на фіг. 4 - збільшене зображення сенсорного блока відповідно до фіг. 3, на фіг. 5 - монтаж сенсорного блока відповідно до винаходу на трактор, на фіг. 6 - вигляд збоку сенсорного блока, розташованого на різальному механізмі зернозбиральної машини відповідно до другого прикладу здійснення, на фіг. 7 - горизонтальна проекцію сенсорного блока відповідно до фіг.6, на фіг. 8 - блокова схема сполучених з сенсорним блоком уніфікованих вузлів і на фіг. 9 - блокова схема сполучених з сенсорним блоком уніфікованих вузлів при регулюванні рульового управління. Пристрій відповідно до винаходу може бути застосований для розпізнавання країв під час обробки поля. Він може бути застосований, по-перше, на зернозбиральних машинах для розпізнавання країв оброблюваного поля і, по-друге, на тягача х для розпізнавання країв оброблюваного поля (див. фіг. 1 і фіг. 5). Відповідно до першої форми здійснення сенсорний блок 1 прикріплений на зернозбиральному комбайні 2, виконаному як саморухома зернозбиральна машина, яка пересувається по полю 6. Сенсорний блок 1 прикріплений спереду зліва за напрямком руху на різальному механізмі 3 зернозбирального комбайна 2. Як показано на фіг. 2, зернозбиральний комбайн 2 має лебідку 4, за допомогою якої збираний врожай 5 транспортується в напрямку подавальних валків 9. Лебідка 4 сполучена з консоллю лебідки 7 з можливістю повороту. У нижній зоні різального механізму 3 між лебідкою 4 і подавальними валками 9 розташований ніж 8. У задній зоні різального механізму 3 розташована консоль 10, що висувається в напрямі угору, на вільному кінці якої прикріплений сенсорний блок 1. Консоль 10 виконана нахиленою уперед під гострим кутом відносно вертикалі, так що полегшується юстирування сенсорного блока 1 у напрямку краю оброблюваного поля 12. Консоль 10 має таку довжину, що сенсорний блок 1 може здійснювати виявлення країв оброблюваного поля 12 через усю лебідку 4. Сенсорний блок 1 відрегульований у напрямку руху зернозбирального комбайна 2 і має зондовану зону охоплення 11. Сенсорний блок 1 має застосовуваний як оптичний сенсор лазерний сенсор, який встановлений на заданій відстані. Встановлена раніше відстань, яка може перебувати в межах між 12 і 16м, переважно 14м, є залежною від керованості та швидкості руху зернозбирального комбайна 2. Якщо сенсорний блок 1 встановлений на занадто велику відстань, зміна краю оброблюваного поля 12 розпізнається занадто рано з тим ефектом, що управління зернозбирального комбайна 2 спрацьовує занадто рано і таким чином створюється перерегулювання. Якщо встановлена занадто незначна відстань, відхилення краю оброблюваного поля 12 розпізнається занадто пізно, так що управління зернозбирального комбайна 2 на це може реагувати не своєчасно. Поряд з таким юстируванням сенсорного блока 1 у вертикальній площині необхідно проводити юстирування його також і в горизонтальній площині, оскільки край оброблюваного поля 12 повинен знаходитися в середній, зондованій сенсорним блоком 1, зоні охоплення 11. З цією метою передбачено юстирувальний пристрій, за допомогою якого сенсорний блок 1 можна юстирувати на початку поїздки або на початку збирального сезону. Передумовою для правильного юстирування є розташування зернозбирального комбайна 2 у напрямку руху і паралельно до передбаченого краю оброблюваного поля 12. У цій стартовій позиції сенсорний блок 1 може бути спочатку юстирований на край оброблюваного поля 12. Як базова точка для юстирування сенсорного блока 1 може бути наявний край оброблюваного поля 12 або кромковий край чи особливо відмічена точка самого зернозбирального комбайна 2. Проставляючи базову точку на зернозбиральному комбайні 2, слід звертати увагу на те, щоб була передбачена відповідна примусова система управління, яка дозволяє переводити сенсорний блок з позиції юстирування в робочу позицію. Описаний далі юстирувальний пристрій орієнтується на край оброблюваного поля 12. Юстирувальний пристрій сприяє поліпшеному завантаженню різального механізму, тому що після проведеного юстирування сенсорного блока 1 зернозбиральний комбайн 2, проходячи бічним краєм різального механізму 3 уздовж зондованого краю оброблюваного поля 12, управляється автоматично. Завдяки юстируванню зрізування стебел зернових культур . відбувається при оптимальному використанні ширини різального механізму. Сенсорний блок 1 прикріплений на рамковій U-подібній насадці 13, яка розпростирається, відкриваючись, у напрямку униз. Вільні кінці 14 насадки 13 мають центровані коаксіально по відношенню один до одного отвори 15, в які вставлені з можливістю зачеплення відповідні засоби кріплення 16 для пригвинчування до прикріпленої на консолі 10 іншої U-подібної насадки 17. Насадка 17 консолі 10 має вертикальне вушко 18 з отворами, співвісними з отворами 15 насадки 13. Насадки 13 і 17 відповідно своїми кінцями сполучені одна з одною гвинтами 16 з силовим замиканням. В результаті послаблення гайки 19 на кінцях 14 сенсорний блок 1 може повертатися навколо рухомої завдяки отворам 15 поворотної осі 20. В результаті цього юстирування сенсорного блока 1 здійснюється у вертикальній площині. Для регулювання сенсорного блока 1 у горизонтальній площині U-подібна насадка 17 прикріплена за допомогою гвинтового з'єднання 21 на консолі 10. Гвинтове з'єднання 21 простягається в осьовому напрямку консолі 10 і дозволяє при цьому в розчепленому положенні здійснювати перекручування U-подібної насадки 17 в тангенціальному напрямку консолі 10. При цьому U-подібна насадка 13 сенсорного блока 1, які гвинтами 16 прикріплені до консолі 10, одночасно рухається разом. Регулювання сенсорного блока 1 можна здійснювати шляхом маніпулювання засобами кріплення 16 з одного боку і гвинтового з'єднання 21 з іншого боку незалежно один від одного в горизонтальному і вертикальному напрямку. Це спрощує юстирування, тому що ці операції юстирування можуть виконуватися одна за одною. Для індикації попередньо заданого положення юстирування сенсорного блока 1 сенсорний блок 1 має на зворотному боці 22 блок індикації 23. Блок індикації 23 має поле індикації 24 з чотирма рядами елементів індикації 25, причому двома рядами елементів індикації 25 утворений прямий кут. Кожний ряд складається з чотирьох елементів індикації 25, що виконані у вигляді світловипромінювальних діодів (СВД). Елементи індикації 25 накопичуються в одній загальній середній точці 26, яка утворює цільову точку для юстирування сенсорного блока 1. Юстирування проведено коректно, якщо засвічуються повернені до середньої точки 26 однобічні елементи індикації 25. Поле індикації 24 утворене за типом оптичного прицілу і тому є саме собою зрозумілим для обслуговуючого персоналу. При повороті сенсорного блока 1 навколо горизонтальної поворотної осі 20 світлове поле, що висвічується елементом індикації 25, переміщається уздовж розташованих коаксіально до осі обертання 27 рядів елементів індикації 25. Якщо сенсорний блок 1 повертається навколо осі обертання 27 консолі, світлове поле переміщається по рядах елементів індикації 25, що проходять горизонтально. Елементи індикації 25, що проходять вертикально, розпростираються паралельно або коаксіально до осі обертання 27. Елементи індикації 25, що проходять горизонтально, розпростираються паралельно до поворотної осі 20. Під час юстирування зернозбиральний комбайн 2 знаходиться в стійкому положенні, причому він відрегульований на утворений як край ділянки збираного врожаю край оброблюваного поля 12. Після того, як сенсорний блок 1 повернувся навколо поворотної осі 20, а потім навколо осі обертання 27 або навпаки таким чином, що засвічуються повернені до середньої точки 26 однобічні елементи індикації 25, спрацьовує засіб кріплення 16 або гвинтове з'єднання 21, так що сенсорний блок встановлюється в положенні юстирування. Далі можна розпочинати процес збирання врожаю. Це юстирування проводять переважно до початку сезону збирання врожаю, причому таке юстирування може виконуватися обслуговуючим персоналом легко і в будь-який час. Сенсорний сигнал 28, що подається сенсорним блоком 1, передається під час руху зернозбирального комбайна 2 на блок обробки 29. Цей блок виконаний переважно як електронний блок управління і оснащений програмою ручного управління, яка впливає на блок регулювання ручним управлінням 30. Блок регулювання ручним управлінням 30 має регулювальні клапани, за допомогою яких приводиться в дію поворотний циліндр 31. Як показано на фіг. 8, сенсорний сигнал 28 може застосовуватися таким чином для регулювання керуючого циліндра 31. Альтернативно сенсорний сигнал 28 може застосовуватися також для регулювання поворотного циліндра 31 (див. фіг. 9). З цією метою сенсорний сигнал 28 обробляють у блоці обробки 29 за попередньо заданою програмою ручного управління. На виході блока обробки 29 відзначається номінальне значення 32, яке подається на компаратор 33. Тут відбувається порівняння з дійсним значенням 34 для кута повороту. Так звана різниця регулювання подається на вхід регулятора 35, який виконаний переважно як цифровий регулятор. Вихідний сигнал регулятора 35 діє на один або декілька клапанів 36, які керують поворотним циліндром 31. Індукується актуальний кут повороту поворотного циліндра 31 і як дійсне значення 34 передається на компаратор 33 за допомогою перетворювача 37, який може мати вимірювальний перетворювач або аналогово-цифровий перетворювач. Регулятор 35 і клапан 36 утворюють частину блока регулювання повороту 50. Він дозволяє досягти того, що поворотний циліндр автоматично регулюється блоком обробки 29 на попередньо заданий номінальний кут повороту. В результаті цього здійснюється автоматичний процес збирання врожаю, причому завдяки розпізнаванню країв ділянки збираного врожаю за допомогою сенсорного блока 1 процес збирання врожаю проводиться надійно та з економією часу при оптимальному використанні ширини різання різального механізму 3. В результаті настроювання сенсорного блока 1 на лівобічний край різального механізму 3 край ділянки збираного врожаю 12 може розпізнаватися точно, а збираний врожай може зрізатися точно по краю. Відповідно до альтернативної форми виконання згідно з фіг. 5 сенсорний блок 1 може застосовуватися також для розпізнавання утвореного польовою борозною краю польової ділянки 38. Край польової ділянки 38 утворює оброблюваний край польової ділянки і може на основі різної висоти розпізнаватися по обидва боки краю 38. Сенсорний блок 1 змонтований при цьому на підтримувальному кронштейні 39 тягача або польового буксира 40, причому підтримувальний кронштейн 39 простягається перед польовим буксиром 40 поперек напрямку руху або краю польової ділянки 38. Сенсорний блок 1 розташований вертикально над краєм польової ділянки 38 і відрегульований на цей край. Польовий буксир 40 тягне плуга 41 за собою. У цьому прикладі виконання блок індикації 23 розташований у кабіні водія і служить для контролю автоматичного юстирування, яке, наприклад, може вводиться в дію за допомогою натискання вимикача водієм на ходу. Автоматичне юстирування здійснюється в результаті обробки та оцінки вироблюваного сенсорним блоком 1 сенсорного сигналу. Цей сигнал може за допомогою електричного кабелю або бездротового зв'язку передаватися в центральний блок обробки 29 польового буксира 40. У блоці обробки 29 обробляється актуальний сенсорний сигнал, який символізує певне місце прозондованої ділянки грунту 6. При цьому необхідно, щоб польовий буксир 40 був позиційований паралельно краю польової ділянки 38. Після спрямування сенсорного блока 1 на край польової ділянки 38, причому сенсорний блок 1 чи сенсор спрямований паралельно краю польової ділянки 38 або займає попередньо задане нульове положення, сенсорний блок 1 зайняв шукане положення юстирування. Сенсорний блок 1 може бути встановлений тепер у цій позиції. Це положення юстирування перевіряється шляхом узгодження символізуючого актуальне положення сенсорного блока 1 елемента індикації 25, який засвічується, з попередньо заданою ідентифікацією. Ця ідентифікація відповідає переважно середній точці 26 блока індикації 23. В залежності від встановленого тепер положення сенсорного блока 1 виробляється сигнал їзди в прямому напрямку, який може служити як задавальна величина для автоматичного керування польовим буксиром 40. Відповідно до альтернативного прикладу виконання згідно з фіг. 6 і фіг. 7 зернозбиральний комбайн 2 може бути обладнаний утвореним з двох ультразвукових сенсорів 42 сенсорним блоком 43. Сенсорний блок 43 рухомо встановлений на сенсорному несучому кронштейні 44, який висувається вперед від різального механізму 3. Сенсорний несучий кронштейн 44 сполучений через шарнір з різальним механізмом 3 і може бути повернений за допомогою механізму переміщення висоти підтримувального кронштейна 45 з поданого на фіг. 6 робочого положення у нижнє транспортне положення. Узгоджені з першим прикладом виконання конструктивні вузли мають такі ж самі базові цифри. На відміну від першого прикладу виконання сенсорний блок 43 прикріплений на підтримувальному кронштейні 46, шарнірно сполученому поперечно до напрямку руху з несучим кронштейном 44. Цей підтримувальний кронштейн 46 охоплює сенсорний блок 43 за допомогою скобоподібного елемента кріплення 47, який виконаний у вигляді хомутика і може бути приєднаний за допомогою нарізного з'єднання 48 до підтримувального кронштейна 46 з силовим замиканням. Цей тип кріплення переважно сприяє тому, що сенсорний блок 1 может бути швидко переведений у позицію юстирування. При цьому сенсорний блок 43 може бути центрований одночасно в горизонтальному і вертикальному напрямку. Підтримувальний кронштейн 46 утворює поворотну вісь для центрування у вертикальному напрямку. В результаті переміщення сенсорного блока 43 уздовж підтримувального кронштейна 46 здійснюється центрування сенсорного блока 43 у горизонтальному напрямку. Сенсорний блок 43 має перший ультразвуковий сенсор 42, який центрується в напрямку руху вздовж краю ділянки збираного врожаю 12, і другий ультразвуковий сенсор 42', що встановлений під гострим кутом до першого ультразвукового сенсора 42 і автоматично центрований на збираний врожай 5. Ультразвукові сенсори 42,42' виконані нахиленими до грунту 6 таким чином, що їхній сигнал, який передається, потрапляє на грунт 6 на відстані більше, ніж чотири метри. На основі різного центрування ультразвукових сенсорів 42,42’ завдяки співвідношенню відповідних ехосигналів можуть бути зондовані краї ділянки збираного врожаю 12. Відповідним першому прикладу виконання способом створений таким чином сенсорний сигнал може бути застосований для керування або регулювання кута повороту системи ручного управління зернозбирального комбайна 2. Юстирування ультразвукових сенсорів 42,42’ індукується окремими елементами індикації 49, які утворені у вигляді світловипромінювальних діодів. Для юстирування у вертикальній площині на бічній стінці сенсорного блока 43 розташовані верхній елемент індикації 49’ і нижній елемент індикації 49". Якщо сенсорний блок 43 встановлений на занадто великій відстані до грунту 6, засвічується верхній елемент індикації 49’ червоного кольору. Якщо сенсорний блок 43 встановлений на занадто малій відстані до грунту 6, засвічується нижній елемент індикації 49" червоного кольору. Якщо сенсорний блок 43 встановлений на правильній відстані до грунту 6, засвічуються верхній і нижній елементи індикації 49’, 49” зеленого кольору. У сенсорному блоці 43, щоб уникнути небажаного мигання елементів індикації 49’, 49”, інтегровано систему комутації гістерезису. Для юстирування сенсорного блока 43 у горизонтальному напрямку передбачений інший, не показаний, елемент індикації, який засвічується зеленим кольором при центруванні першого ультразвукового сенсора 42 на край ділянки поля збираного врожаю 12. Центрування в горизонтальному напрямку необхідне лише у виняткових випадках. Його можна здійснити вже на заводі, тому що воно повинне бути узгоджене з розмірами різального механізму 3. Оскільки різальний механізм 3 своїм лівим різальним краєм утворює перевагу для сприятливого завдяки цьому центруванню зондування краю ділянки поля збираного врожаю 12, тому звичайно достатньо, щоб сенсорний блок 43 був центрований у горизонтальному напрямку на різальний механізм 3. В результаті того, що др угий ультразвуковий сенсор 42” цілком спрямований на збираний врожай 5, найпростішим способом може бути генерований однозначний сенсорний сигнал для зондування краю ділянки поля збираного врожаю 12. Подальша обробка сенсорного сигналу може здійснюватися відповідним, описаним вище у першому прикладі виконання, способом. Блок обробки 29 можна використовувати для того, щоб за допомогою дистанційного управління маніпулювати механізмом переміщення висоти підтримувального кронштейна 45. Таким чином можна переміщати сенсорний блок 43 за заданою програмою юстирування у вертикальному напрямку. Тому висота регулюється в залежності від висоти збираного врожаю або висота зернових культур може бути регульованою. Більш прийнятно, щоб сенсор встановлювався на певний попередньо заданий діапазон відстаней. Механізм переміщення висоти підтримувального кронштейна 45 більш прийнятно виконувати у вигляді циліндра, який приводиться в дію за допомогою робочої рідини, і його управління може бути електричним. Альтернативно блок індикації 23 може бути виконаний у вигляді розташованого в рульовій рубці зернозбирального комбайна 2 телевізійного екрана, який сполучений з мікропроцесором блока обробки 29. Телевізійний екран може переважно застосовуватися також з іншою метою застосування, зокрема для індикації заданих видів управління тощо.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of controlling agricultural machine and a device for adjusting a sensor
Автори англійськоюHuster Jochen
Назва патенту російськоюСпособ управления сельскохозяйственной машиной и устройство для настройки сенсора
Автори російськоюХустер Йохен
МПК / Мітки
МПК: A01D 75/00, A01B 69/00
Мітки: управління, машиною, пристрій, сільськогосподарською, спосіб, настройки, сенсора
Код посилання
<a href="https://ua.patents.su/8-68349-sposib-upravlinnya-silskogospodarskoyu-mashinoyu-ta-pristrijj-dlya-nastrojjki-sensora.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління сільськогосподарською машиною та пристрій для настройки сенсора</a>
Пристрій для управління самохідною сільськогосподарською машиною
Номер патенту: 9166
Опубліковано: 30.09.1996
Автори: Умеренко Аркадій Аркадійович, Константиновський Михайло Йосипович, Покуса Олексій Олександрович, Збарський Борис Абрамович, Кузьмінов Вадим Георгійович, Завгородній Віталій Євгенійович
МПК: A01B 69/04
Мітки: управління, машиною, самохідною, сільськогосподарською, пристрій
Формула / Реферат:
1. Устройство для управления самоходной сельскохозяйственной машиной, содержащее насосную станцию, состоящую из насоса постоянной подачи, предохранительного клапана, фильтра и гидробака, у зел дистанционного управления, состоящий из рулевого колеса, распределителя, насоса-дозатора и обратного клапана, переключающий блок, замедлительные клапаны, гидроцилиндр, копирующий щуп, рычаг гидрораспределителя, гидрораспределитель, управляемые...
Пристрій управління самохідною сільськогосподарською машиною
Номер патенту: 7747
Опубліковано: 26.12.1995
Автори: Соболєв Анатолій Ігорович, Кузьмінов Вадим Георгійович, Умеренко Аркадій Аркадійович, Анюхін Володимир Михайлович, Завгородній Віталій Євгенович, Русанов Іван Іванович
МПК: A01B 69/04
Мітки: пристрій, самохідною, управління, машиною, сільськогосподарською
Формула / Реферат:
1. Устройство управления самоходной сельскохозяйственной машиной, содержащее следящую систему с копирующими щупами, гидрораспределителем и гидроцилиндром управляемых колес, узел дистанцонного управления, клапан слива рабочей жидкости и гидроцилиндр обратной связи, отличающееся тем, что, с целью обеспечения работоспособности устройства и снижения трудоемкости подключения его гидросистемы к энергоблоку клапан слива выполнен...
Пристрій управління самохідною сільськогосподарською машиною
Номер патенту: 15956
Опубліковано: 29.08.1997
Автори: Завгородній Віталій Євгенович, Ласько Віталій Васильович, Соболєв Анатолій Ігорович, Умеренко Аркадій Аркадійович, Анюхін Володимир Михайлович, Кузьмінов Вадим Георгійович
МПК: A01B 69/04
Мітки: сільськогосподарською, самохідною, управління, пристрій, машиною
Формула / Реферат:
Устройство у правлення самоходной сельскохозяйственной машиной по авт. св. № 1287763, отличающееся тем, что, с целью повышения работоспособности устройства и точности управления направлением движения машины по рядкам убираемых культур в режиме ручной коррекции, оно снабжено дросселями с обратными клапанами, установленными в управляющих магистралях узла дистанционного управления перед присоединением к ним магистрали гидроцилиндра обратной...
Пристрій для управління самохідною сільськогосподарською машиною
Номер патенту: 9168
Опубліковано: 30.09.1996
Автори: Завгородній Віталій Євгенійович, Умеренко Аркадій Аркадійович, Збарський Борис Абрамович, Покуса Олексій Олександрович, Кузьмінов Вадим Георгійович
МПК: A01B 69/04
Мітки: пристрій, управління, самохідною, машиною, сільськогосподарською
Формула / Реферат:
Устройство для управления самоходной сельскохозяйственной машиной, содержащее насосную станцию с маслобаком, следящую систему автоматического управления с гидроцилиндром управляемых колес и гидрораспределителем, кинематически связанным с копирующими щупами и управляемыми колесами посредством рычагов и телескопической тяги обратной связи с гидравлическим тормозным звеном, узел дистанционного управления с насосом-дозатором и...
Датчик до копіювача-водія слідкуючої системи автоматичного управління сільськогосподарською машиною по рядках буряків
Номер патенту: 9159
Опубліковано: 30.09.1996
Автори: Умеренко Аркадій Аркадійович, Барвінко Олександр Самійлович, Чернявський Спиридон Васильович
МПК: A01B 69/04
Мітки: системі, машиною, датчик, буряків, сільськогосподарською, слідкуючої, управління, копіювача-водія, рядках, автоматичного
Формула / Реферат:
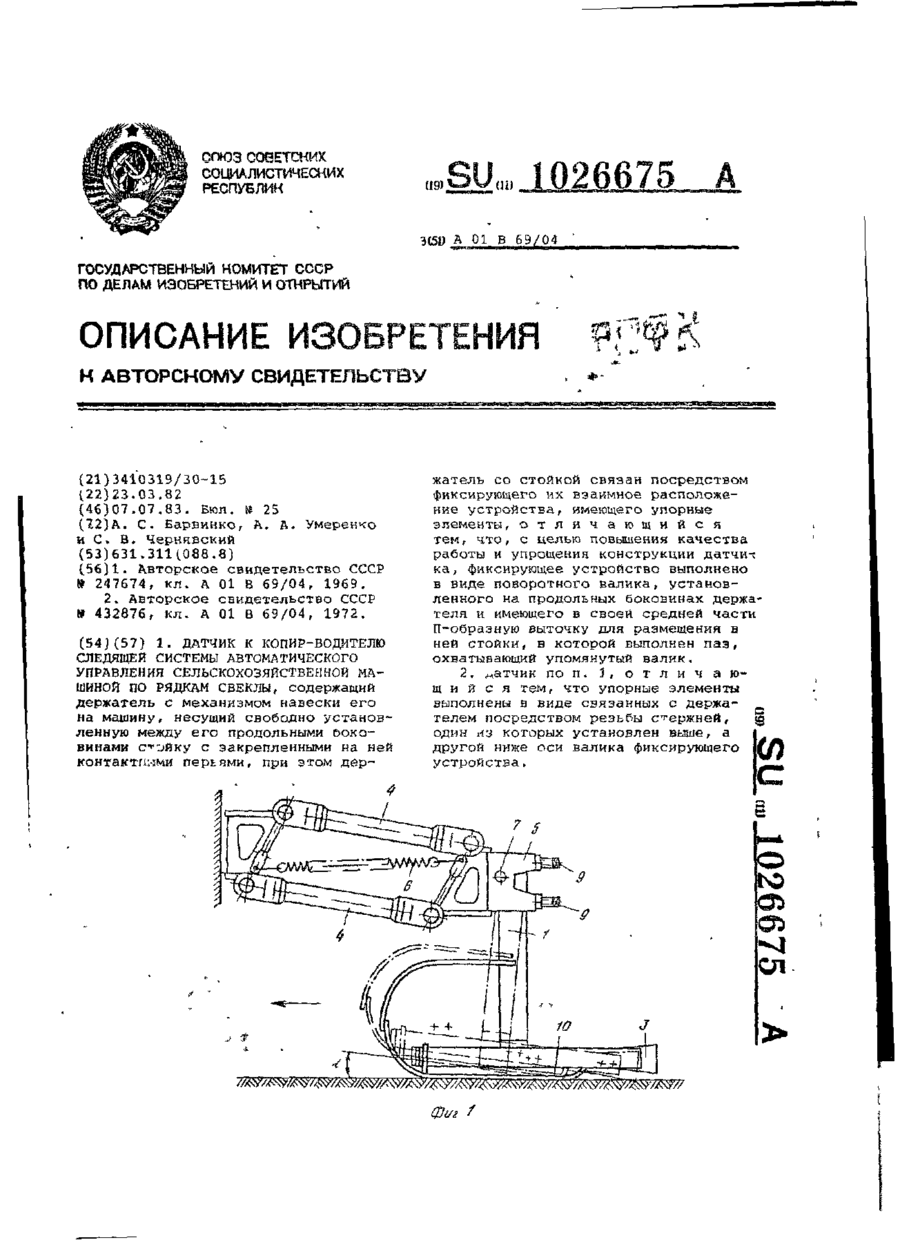
1. Датчик к копир-водителю следящей системы автоматического управления сельскохозяйственной машиной по рядкам свеклы, содержащий держатель с механизмом навески его на машину, несущий свободно установленную между его продольными боковинами стойку с закрепленными на ней контактными перьями, при этом держатель со стойкой связан посредством фиксирующего их взаимное расположение устройства, имеющего упорные элементы, отличающийся тем, что, с...
Попередній патент: Застосування інгібіторів циклооксигенази-2 для запобігання серцево-судинним розладам
Наступний патент: Дозована форма, яка містить сертралін, та спосіб лікування
Випадковий патент: Пристрій для визначення тиску повітря у дихальних шляхах людини