Спосіб керування повітряним рухом і система для його здійснення
Номер патенту: 75122
Опубліковано: 15.03.2006
Автори: Федосенко Олег Федорович, Безчасний Олексій Увіналійович, Федосенко Володимир Олегович, Лабенко Дмитро Петрович
Формула / Реферат
1. Спосіб керування повітряним рухом, що включає одержання інформації про координати повітряних об'єктів і параметри їхнього руху за допомогою радіолокаційного комплексу і засобів радіозв'язку, вторинну обробку отриманої інформації в обчислювальному комплексі автоматизованої системи, відображення на екрані індикатора повітряної обстановки інформації про рух повітряних об'єктів, розрахунок параметрів конфліктних ситуацій конфліктуючих повітряних об'єктів і поділ конфліктних ситуацій за ступенем важливості керування з командного центру, який відрізняється тим, що додатково здійснюють розрахунок параметрів конфліктних ситуацій конфліктуючих повітряних і наземних об'єктів, дуальний поділ конфліктних ситуацій з використанням додаткового індикатора в координатах "номер дуальної конфліктної ситуації - час конфліктної ситуації", по одній координаті якого дискретно розміщують шкали, кожна з яких відповідає порядковому номеру дуальної пари об'єктів конфліктної ситуації, а по іншій координаті на часовій осі шкали, що відповідає номеру дуальної пари, відображають позначки об'єктів цієї дуальної пари, позначки параметрів конфліктної ситуації і формуляри, що ідентифікують об'єкти конфліктної ситуації.
2. Спосіб за п. 1, який відрізняється тим, що здійснюють дуальний поділ конфліктних ситуацій "засіб повітряного нападу - об'єкт, що захищається", і на часовій осі шкали дуальної пари конфліктної ситуації відображають позначку повітряного об'єкта, ідентифікованого із засобом нападу, на початку відліку, позначку об'єкта, що захищається, - наприкінці відліку, а між ними - позначки повітряних об'єктів, ідентифікованих із засобами захисту, і позначки параметрів конфліктної ситуації, при цьому відстань між позначкою повітряного об'єкта, ідентифікованого із засобом нападу, і позначкою об'єкта, що захищається, відповідає поточному часу підльоту засобу нападу до об'єкта, що захищається.
3. Спосіб за пп. 1 або 2, який відрізняється тим, що шкали дуальних конфліктних ситуацій з мінімальною відстанню між оцінкою повітряного об'єкта, ідентифікованого із засобом нападу, і оцінкою об'єкта, що захищається, і/або оцінкою засобу захисту виділяють кольором, що привертає увагу.
4. Система керування повітряним рухом, переважно для наведення винищувачів на повітряні цілі, що містить центральну ЕОМ, ЕОМ зв'язку, пристрої сполучення з РЛС, пристрої сполучення з командними пунктами, індикатор повітряної обстановки, локальну обчислювальну мережу і шину обміну, причому порти введення-виведення центральної ЕОМ з'єднані з відповідними входами індикатора повітряної обстановки та з локальною обчислювальною мережею, що з'єднана з ЕОМ зв'язку й обчислювачем параметрів перехоплення, траєкторій наведення, маневрів цілей, відстаней між положеннями винищувачів і повітряних засобів нападу, часу перехоплення і шляхів польоту винищувачів, порт введення-висновку ЕОМ зв'язку через шину обміну з'єднаний з n пристроями сполучення з РЛС і m пристроями сполучення з командними пунктами підрозділів засобів захисту, при цьому n+m груп зв'язків двонаправленого обміну пристроїв сполучення є інформаційними каналами системи, яка відрізняється тим, що вона додатково містить підключений до локальної обчислювальної мережі обчислювач параметрів дуальних конфліктних ситуацій "засіб повітряного нападу - об'єкт, що захищається", і індикатор у координатах "номер дуальної конфліктної ситуації - час конфліктної ситуації", по одній координаті якого дискретно розташовані шкали, кожна з яких відповідає порядковому номеру дуальної конфліктної ситуації, а по іншій координаті на часовій осі шкали, що відповідає номерові дуальної конфліктної ситуації, відображені позначки об'єктів дуальної конфліктної ситуації, позначки параметрів конфліктної ситуації і формуляри, що ідентифікують об'єкти конфліктної ситуації.
Текст
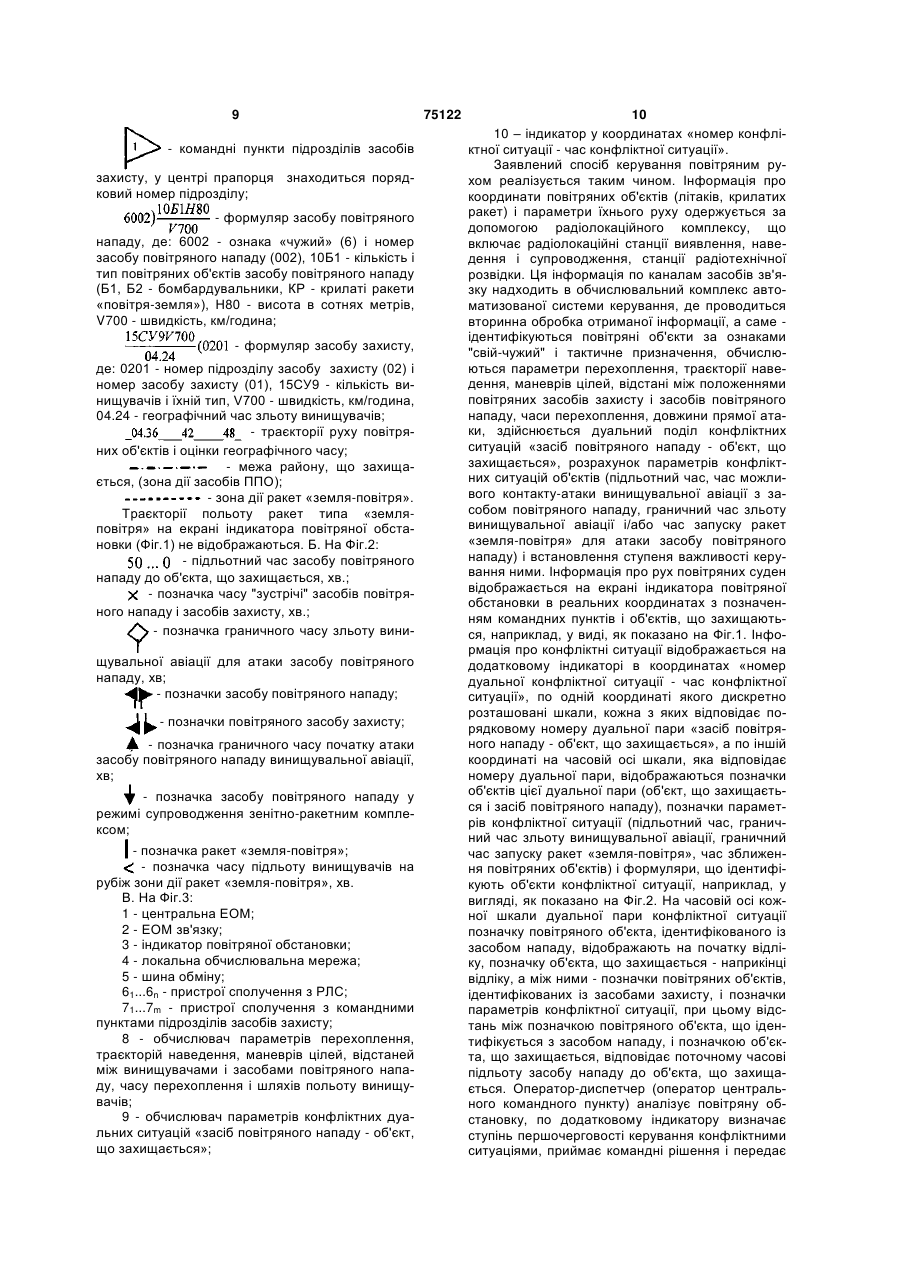
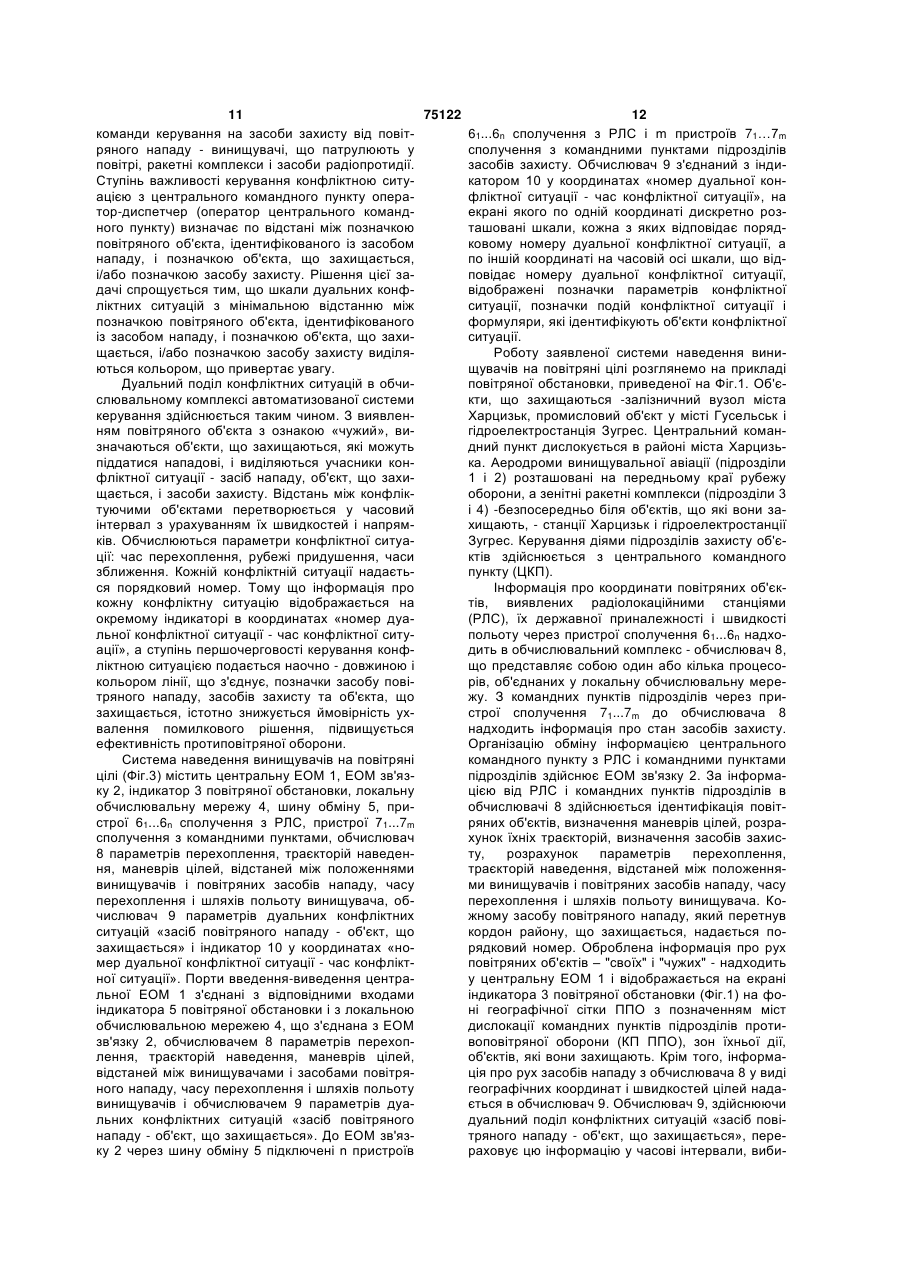
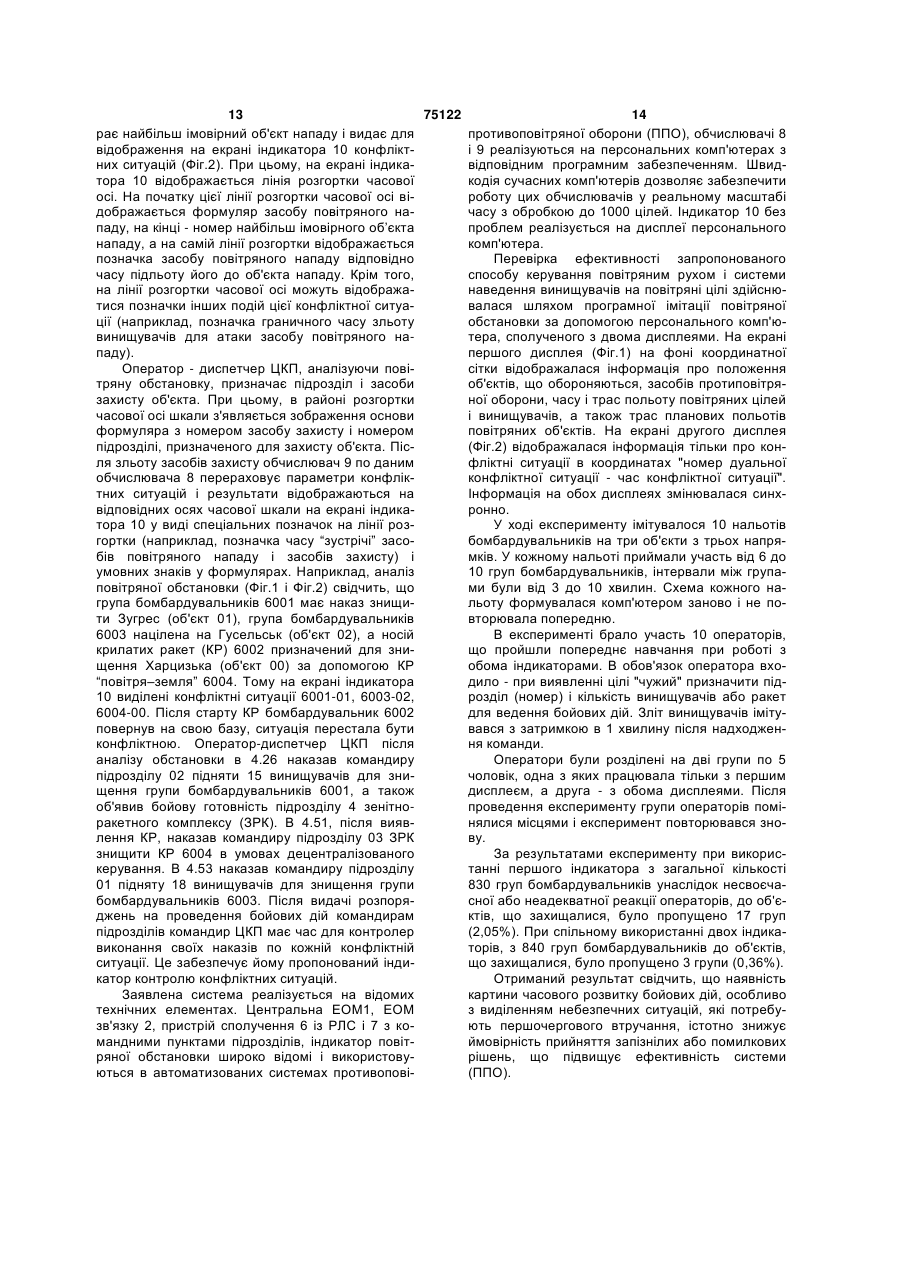
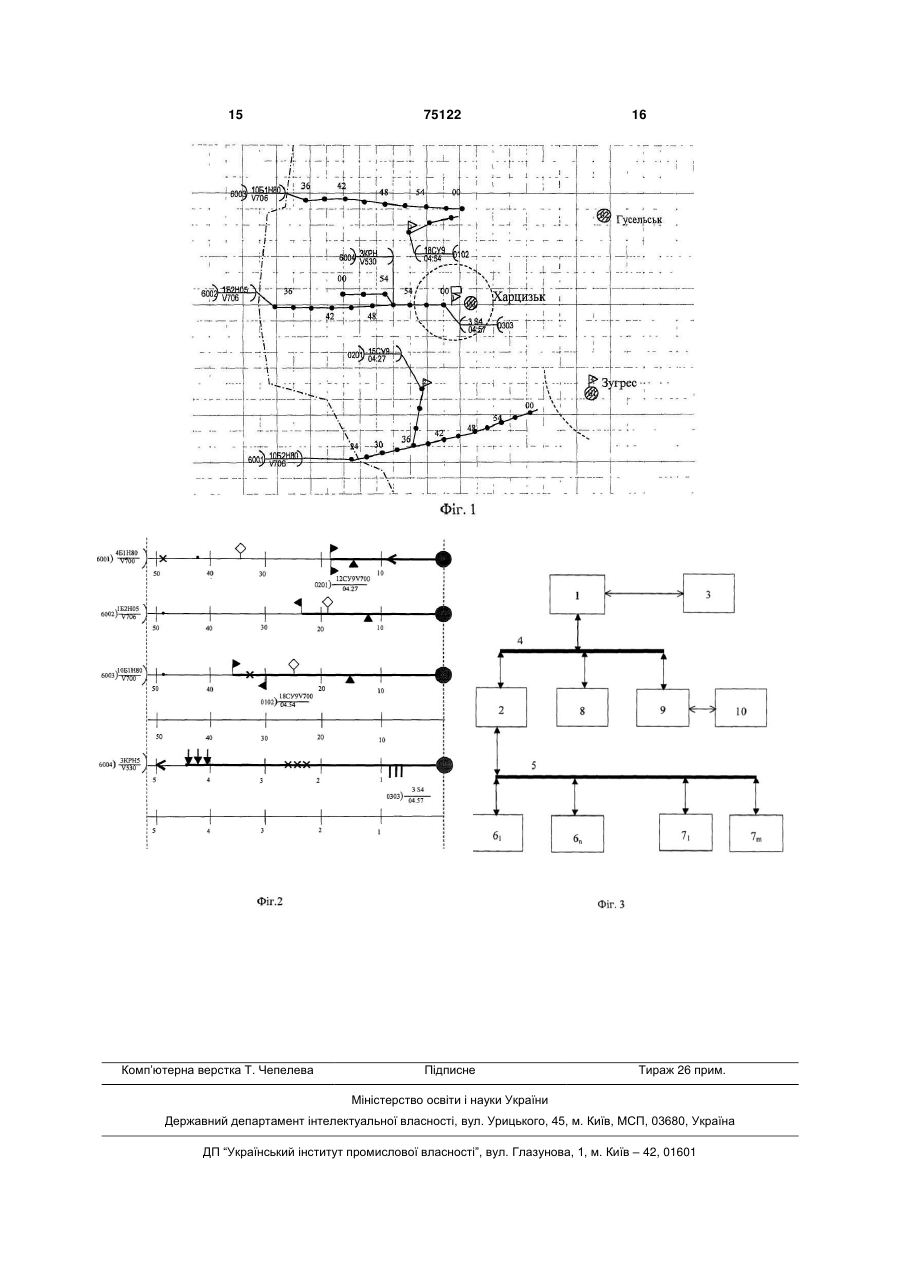
1. Спосіб керування повітряним рухом, що включає одержання інформації про координати повітряних об'єктів і параметри їхнього руху за допомогою радіолокаційного комплексу і засобів радіозв'язку, вторинну обробку отриманої інформації в обчислювальному комплексі автоматизованої системи, відображення на екрані індикатора повітряної обстановки інформації про рух повітряних об'єктів, розрахунок параметрів конфліктних ситуацій конфліктуючих повітряних об'єктів і поділ конфліктних ситуацій за ступенем важливості керування з командного центру, який відрізняється тим, що додатково здійснюють розрахунок параметрів конфліктних ситуацій конфліктуючих повітряних і наземних об'єктів, дуальний поділ конфліктних ситуацій з використанням додаткового індикатора в координатах "номер дуальної конфліктної ситуації - час конфліктної ситуації", по одній координаті якого дискретно розміщують шкали, кожна з яких відповідає порядковому номеру дуальної пари об'єктів конфліктної ситуації, а по іншій координаті на часовій осі шкали, що відповідає номеру дуальної пари, відображають позначки об'єктів цієї дуальної пари, позначки параметрів конфліктної ситуації і формуляри, що ідентифікують об'єкти конфліктної ситуації. 2. Спосіб за п.1, який відрізняється тим, що здійснюють дуальний поділ конфліктних ситуацій "засіб повітряного нападу - об'єкт, що захищається", і на часовій осі шкали дуальної пари конфліктної ситуації відображають позначку повітряного об'єкта, ідентифікованого із засобом нападу, на 2 (19) 1 3 75122 4 відповідає номерові дуальної конфліктної ситуаситуації і формуляри, що ідентифікують об'єкти ції, відображені позначки об'єктів дуальної конфконфліктної ситуації. ліктної ситуації, позначки параметрів конфліктної Взаємопов'язані винаходи відносяться до способів і систем виявлення, супроводження і розподілу повітряних цілей у радіолокаційних комплексах наземного і/або морського базування і можуть бути використані у системах протиповітряної оборони при захисті наземних об'єктів від повітряного нападу і у системах запобігання зіткнення повітряних об'єктів . Існує відомий спосіб прицілювання при атаці швидкісних цілей винищувачем по спрямленій траєкторії і пристрій для його реалізації [патент Російської Федерації №2170907, МПК 7 F41G3/22, публ. 2001г.]. У цьому способі прогнозують час виходу винищувача, що атакує, на межу області ефективного застосування зброї, координати положення і параметри руху винищувача і цілі, значення вектора її дальності щодо винищувача, саму дальність ефективного застосування зброї. Прогнозують додатково вектор дальності попередженого положення цілі на сумарний час виходу винищувача на межу зазначеної області ефективного застосування зброї і польоту снаряда, пущеного з межі цієї області до зустрічі з ціллю. Направляють політ винищувача у процесі атаки пропонованим способом уздовж зазначеного вектора дальності випередженого на сумарний час виходу винищувача на межу області ефективного застосування зброї і польоту снаряда, положення цілі, що, при нульових помилках прицілювання і відповідності руху швидкісної цілі прогнозу, забезпечує атаку по спрямленій траєкторії, тобто не тільки при мінімумі потрібних нормальних прискорень, але і при максимумі. Пристрій, що реалізує цей спосіб, містить бортові системи автоматичного супроводу цілей, бортові датчики поточних координат і параметрів польоту винищувача, мікропроцесорні блоки екстраполяції руху цілі, екстраполяції руху винищувача, балістики, обчислення прогнозованої дальності ефективного застосування зброї, прицільнопілотажний індикатор, задатчик типу снарядів і його балістичних і аеродинамічних характеристик, спеціальний обчислювач, що включає суматор, два компаратори, помножувач, двоканальний ключ і інше, з'єднані між собою визначеним чином. Такі технічні рішення дозволяють реалізувати керування винищувачем при атаці швидкісних цілей з оптимізацією потрібних нормальних прискорень, але не можуть забезпечити керування засобами захисту наземних об'єктів від повітряного нападу. Також відомий спосіб [патент Російської Федерації №2190863, МПК 7 G01S13/72, публ. 2002р.] ранжирування цілей, який дозволяє вибрати таку ціль, яка одночасно найбільш небезпечна для нас і найбільш сприятливою для нападу на неї в умовах обмежень, зв'язаних зі складом і можливостями бортового устаткування винищувача і цілі. Спосіб ранжирування цілей, заснований на обчисленні мінімуму квадратичнолінійного функціонала, у складі якогоодночасно враховуються як параметри, що свідчать про небезпеку цілі, так і параметри, які сприяють нападу на неї. Якщо ідентифікована ціль має кращі льотно-технічні характеристики, то у функціоналі велику роль у його мінімізації грає додаток, що враховує вимогу забезпечення власного захисту. У протилежному випадку, велику роль грає додаток, що характеризує можливість нападу. Технічним результатом, що досягається, є підвищення власної безпеки винищувачів і одночасне визначення цілі, для якої у поточній ситуації забезпечуються найбільш сприятливі умови для її поразки з урахуванням складу бортового устаткування винищувача і цілі. Ранжирування цілей по ступені їхньої важливості (небезпеки) дозволяє установити черговість застосування засобів поразки по супроводжуваним цілям, і тим самим за умови, що кількість засобів поразки на борту винищувача менше кількості одночасно супроводжуваних цілей, оптимальним образом вирішити задачу як їхньої поразки, так забезпечення власної безпеки. Однак цей спосіб не враховує можливостей захисту наземних об'єктів від повітряного нападу і не може використовуватися в системах керування протиповітряною обороною. Описано спосіб керування рухом транспорту на трасах [В.Грачов і В.М-Кейн «Радіотехнічні засоби керування повітряним рухом», М., «Транспорт», 1975м, ст.329...333], у якому центр керування рухом (ЦКР) на трасах зв'язують лініями зв'язку із усіма аеродромними диспетчерськими пунктами (ДП), що обслуговуються ним, по яких у ЦЕОМ (цифрову електронну обчислювальну машину) ЦКР вводяться плани польотів. У ЦЕОМ ЦКР з обліком метеорологічних умов розраховуються графіки руху - моменти часу і висоту прольоту кожного контрольного пункту. Інформація з контрольних пунктів порівнюється з розрахованими графіками руху і, якщо виявляється можливість небезпечного зближення, то вона відображається на спеціальному панорамному індикаторі. На екрані нанесене умовне зображення трас і контрольних пунктів, що відносяться до даного диспетчерського району. Контрольні пункти мають літерні позначення, в нижній частині екрана передбачають осередок для знакової інформації, що містить час можливого небезпечного зближення, позначення контрольного пункту і номера літаків, що зближаються. Для усунення небезпечної ситуації диспетчер змінює один з планів польоту, ЦЕОМ аналізує змінений варіант 5 75122 6 плану і, якщо виникне нова небезпека зближення, диспетчером t за допомогою обчислювального то диспетчер стирає введену раніше інформацію комплексу розраховують тенденцію зміни параі пробує новий варіант. Так продовжується доти, метрів польоту між кожним повітряним судном і доки не буде знайдений безконфліктний варіант всіма іншими повітряними суднами, що знахопланів польоту. У процесі виконання польотів дяться в зоні керування повітряним рухом, і на реальний графік руху літаків неминуче відрізняпідставі отриманих даних усі повітряні судна, що ється від розрахункового, а тому плани безупинзнаходяться в зоні керування, розділяють на три но коректують. Дійсні моменти проходження конгрупи, причому в першу групу входять повітряні трольних пунктів визначають за допомогою судна, що вимагають керування з імовірністю, що оглядових радіолокаторів і вводять у ЦЕОМ ЦКР дорівнює нулю, у другу групу входять повітряні автоматично. Цей спосіб керування повітряним судна, що вимагають керування з імовірністю, яка рухом може бути охарактеризований наступною є більшою за нуль, але меншою за одиницю, а в сукупністю істотних ознак. третю групу входять повітряні судна, що вимагаПризначення - керування повітряним рухом, ють керування з імовірністю, рівною одиниці, на дії над матеріальними об'єктами -складання плаекрані повітряної обстановки повітряні судна цих ну польотів літаків, визначення реальних параметрьох груп і інформацію, що їх супроводжує, вітрів руху літаків за допомогою оглядових радіодображають різними кольорами, причому повітлокаційних станцій, виявлення можливості ряні судна другої і третьої груп додатково з'єднунебезпечного зближення, корекція плану польотів ють лініями зі шкалою, одиниця довжини якої літаків, доведення відкоректованого плану польодорівнює швидкості зближення з іншими повітрятів літаків до учасників; режими виконання дій ними суднами або перешкодами. виявлення можливості небезпечного зближення і Недоліки способу-прототипу - погана сприйкорекція плану польотів літаків виробляються нятливість параметрів зближення об'єктів повітдоти, доки не буде знайдений безконфліктний ряного руху, порівняно висока складність оцінки варіант; аналіз небезпечної ситуації виробляєтьконфліктних ситуацій при аналізі повітряної обся по панорамному індикатору, на якому конфлікстановки, відсутність можливості оцінки положентна ситуація відображається у вигляді формуляня повітряних об'єктів щодо наземних. Ці недолірів. Такий спосіб може використовуватися для ки ускладнюють використання такого способу наведення винищувачів на повітряні цілі при закерування повітряним рухом при захисті наземхисті наземних цілей від повітряного нападу, якних об'єктів від повітряного нападу, тобто в інтещо змінити постановочну задачу на зворотну, ресах протиповітряної оборони. тобто замість запобігання зіткнення - забезпеВ основу винаходу поставлена задача розрочення контакту повітряних об'єктів. бки способу керування повітряним рухом і систеНедолік описаного способу керування повітми наведення винищувачів на повітряні цілі шляряним рухом полягає в тому, що аналіз конфліктхом підвищення ефективності керування них ситуацій виробляється послідовною зміною повітряним рухом при захисті наземних об'єктів планів польоту, тому при високій інтенсивності від повітряного нападу за рахунок дуального поповітряного руху висока ймовірність зіткнення ділу конфліктних ситуацій при аналізі повітряної через помилки диспетчера й обмеженої пропускобстановки. ної здатності ЦКП, а при захисті від повітряного Зазначений технічний результат досягається нападу - пропуск засобів нападу до об'єкта, що тим, що в способі керування повітряним рухом, захищається. який включає одержання інформації про коордиНайбільш близьким по технічній сутності до нати повітряних об'єктів і параметри їхнього руху технічного рішення, що заявляється, є спосіб кеза допомогою радіолокаційного комплексу і засорування повітряним рухом, відомий [з опису до бів радіозв'язку, вторинну обробку отриманої інпатенту Російської Федерації №2134910, МПК 6 формації в обчислювальному комплексі автомаG08G7/00, G01S13/91, публ. 20.08.1999р.]. тизованої системи, відображення на екрані Описаний спосіб керування повітряним руіндикатора повітряної обстановки інформації про хом, що включає одержання інформації про корух повітряних об'єктів, розрахунок параметрів ординати повітряних суден і параметри їхнього конфліктних ситуацій конфліктуючих повітряних руху за допомогою радіолокаційного комплексу і об'єктів і поділ конфліктних ситуацій за ступенем засобів радіозв'язку, вторинну обробку отриманої важливості керування з командного центру, доінформації в обчислювальному комплексі автодатково здійснюють: матизованої системи керування повітряним ру- розрахунок параметрів конфліктних ситуахом, відображення на екрані індикатора повітряцій конфліктуючих повітряних і наземних об'єктів і ної обстановки інформації про рух повітряних дуальний поділ конфліктних ситуацій з викориссуден, і про загрозу зіткнення повітряних суден, танням додаткового індикатора в координатах оцінку диспетчером фактичних і прогнозованих «номер дуальної конфліктної ситуації - час конфінтервалів між ними, ухвалення рішення про неліктної ситуації», по одній координаті якого дисобхідність і спосіб втручання в рух повітряних кретно розміщують шкали, кожна з яких відповісуден і керування їх рухом за допомогою команд, дає порядковому номеру дуальної пари об'єктів переданих екіпажу через засоби зв'язку, відрізняконфліктної ситуації, а по іншій координаті на ється тим, що з метою підвищення безпеки часовій осі шкали, що відповідає номеру дуальної польотів і збільшення пропускної здатності сиспари, відображають позначки об'єктів цієї дуальтеми керування повітряним рухом шляхом спроної пари, позначки параметрів, конфліктної ситущення і полегшення оцінки повітряної обстановки ації і формуляри, що ідентифікують об'єкти кон 7 75122 8 фліктної ситуації; зв'язку й обчислювачів виконують персональні - здійснюють дуальний поділ конфліктних сикомп'ютери, а функції табло - їхні монітори. туацій «засіб повітряного нападу - об'єкт, що заНедолік такої системи - відсутність обліку хищається», і відображають на часовій осі шкали ступеня небезпеки повітряних засобів нападу для дуальної пари конфліктної ситуації позначку повіоб'єктів, що захищаються. Це знижує її ефективтряного об'єкта, ідентифікованого із засобом наність при використанні в системах керування пропаду, на початку відліку, позначку об'єкта, що типовітряною обороною. захищається - наприкінці відліку, а між ними В основу винаходу поставлена задача підвипозначки повітряних об'єктів, ідентифікованих із щення ефективності системи наведення винищузасобами захисту, і відмітки параметрів конфліквачів на повітряні цілі з метою протиповітряної тної ситуації. При цьому відстань між позначкою оборони за рахунок можливості оцінки ступеня повітряного об'єкта, ідентифікованого з засобом небезпеки повітряних засобів нападу для об'єктів, нападу, і позначкою об'єкта, що захищається, що захищаються. відповідає поточному часові підльоту засобу наЗадача вирішується тим, що система навепаду до об'єкта, що захищається; дення винищувачів на повітряні цілі, яка містить - шкали дуальних конфліктних ситуацій з міцентральну ЕОМ, ЕОМ зв'язку, пристрої сполунімальною відстанню між позначкою повітряного чення з РЛС, пристрої сполучення з командними об'єкта, ідентифікованого з засобом нападу, і пунктами, індикатор повітряної обстановки, локапозначкою об'єкта, що захищається, і/або позначльну обчислювальну мережу і шину обміну, прикою засобу захисту виділяють кольором, що причому порти введення-виведення центральної вертає увагу. ЕОМ з'єднані з відповідними входами індикатора Спосіб, що заявляється, відповідає критеріям повітряної обстановки і з локальною обчислювавинаходу «новизна» і «винахідницький рівень», льною мережею, що з'єднана з ЕОМ зв'язку і обтому що ознаки, які відрізняють технічне рішення, числювачем параметрів перехоплення, траєктощо заявляється, від прототипу, не виявлені в рій наведення, маневрів цілей, відстаней між інших технічних рішеннях, а також відповідає криположеннями винищувачів і повітряних засобів терієві «промислова застосовність», тому що нападу, часу перехоплення і шляхів польоту виможе бути використане при розробці комплексів нищувачів, порт введення-виведення ЕОМ зв'язпротиповітряної оборони і системах керування ку через шину обміну з'єднаний із n пристроями повітряним рухом. сполучення з РЛС і m пристроями сполучення з Заявлений спосіб найбільш ефективний при командними пунктами підрозділів засобів захисреалізації в системах протиповітряної оборони. ту, при цьому n+m груп зв'язків двонапрямленноАвтоматизована система керування протиповітго обміну пристроїв сполучення є інформаційниряної оборони з використанням заявленого споми каналами системи, додатково містить собу так само відповідає критеріям «новизна», підключений до локальної обчислювальної ме«винахідницький рівень» і «промислова застосорежі обчислювач параметрів дуальних конфліктвність» і може бути визнана винаходом. них ситуацій «засіб повітряного нападу - об'єкт, Прототипом пропонуємої системи прийнята що захищається» і індикатор у координатах «новідома система наведення винищувачів на повітмер дуальної конфліктної ситуації - час конфліктряні цілі [свідоцтво на корисну модель Російської ної ситуації», по одній координаті якого дискретно Федерації №13709, МПК 7 G06F15/16, публ. розташовані шкали, кожна з яких відповідає по10.05.2000р.] містить центральну ЕОМ, ЕОМ зв'ярядковому номеру дуальної конфліктної ситуації, зку, пристрої сполучення з РЛС, пристрої сполуа по іншій координаті на часовій осі шкали, яка чення з командними пунктами, табло, локальну відповідає номеру дуальної конфліктної ситуації, обчислювальну мережу і шину обміну, причому відображені позначки об'єктів дуальної конфліктгрупа виводів центральної ЕОМ порозрядно ної ситуації, позначки параметрів конфліктної з’єднана з відповідними входами табло, а її група ситуації і формуляри, що ідентифікують об'єкти зв'язків двонаправленного обміну порозрядно конфліктної ситуації. з'єднана з локальною обчислювальною мережею, Винаходи пояснюються кресленнями. котра аналогічним чином порозрядно з'єднана з На Фіг.1 показаний приклад відображення інпершою групою зв'язків ЕОМ зв'язку, друга група формації на екрані індикатора повітряної обстазв'язків якої з'єднана із шиною обміну, з якою новки, на Фіг.2 показаний приклад відображення аналогічно з'єднані порозрядно η пристроїв споінформації на екрані індикатора в координатах лучення з РЛС і m пристроїв сполучення з коман«номер дуальної конфліктної ситуації - час конфдними пунктами, при цьому n+m груп зв'язків ліктної ситуації», на Фіг.3 - блок-схема системи двонаправленного обміну пристроїв сполучення є наведення винищувачів на повітряні цілі. На інформаційними каналами системи, з локальною Фіг.1...3 знаками і цифрами позначені: обчислювальною мережею порозрядно з'єднані А. На Фіг.1: своїми групами зв'язків двонаправленного обміну - об'єкт, що захищається, і його порядобчислювачі параметрів перехоплення, траєкторій наведення, маневрів цілей, відстаней між факовий номер; ктичними і розрахунковими положеннями винищувачів, радіусів розвороту, програмних - центральний командний пункт (ЦКП) швидкостей, часу перехоплення, довжин прямої атаки, моментів часу форсажу і шляхів польоту системи протиповітряної оборони (ІШО); винищувача. Функції центральної ЕОМ, ЕОМ 9 - командні пункти підрозділів засобів захисту, у центрі прапорця знаходиться порядковий номер підрозділу; - формуляр засобу повітряного нападу, де: 6002 - ознака «чужий» (6) і номер засобу повітряного нападу (002), 10Б1 - кількість і тип повітряних об'єктів засобу повітряного нападу (Б1, Б2 - бомбардувальники, КР - крилаті ракети «повітря-земля»), Н80 - висота в сотнях метрів, V700 - швидкість, км/година; - формуляр засобу захисту, де: 0201 - номер підрозділу засобу захисту (02) і номер засобу захисту (01), 15СУ9 - кількість винищувачів і їхній тип, V700 - швидкість, км/година, 04.24 - географічний час зльоту винищувачів; - траєкторії руху повітряних об'єктів і оцінки географічного часу; - межа району, що захищається, (зона дії засобів ППО); - зона дії ракет «земля-повітря». Траєкторії польоту ракет типа «земляповітря» на екрані індикатора повітряної обстановки (Фіг.1) не відображаються. Б. На Фіг.2: - підльотний час засобу повітряного нападу до об'єкта, що захищається, хв.; - позначка часу "зустрічі" засобів повітряного нападу і засобів захисту, хв.; - позначка граничного часу зльоту винищувальної авіації для атаки засобу повітряного нападу, хв; - позначки засобу повітряного нападу; - позначки повітряного засобу захисту; - позначка граничного часу початку атаки засобу повітряного нападу винищувальної авіації, хв; - позначка засобу повітряного нападу у режимі супроводження зенітно-ракетним комплексом; - позначка ракет «земля-повітря»; - позначка часу підльоту винищувачів на рубіж зони дії ракет «земля-повітря», хв. В. На Фіг.3: 1 - центральна ЕОМ; 2 - ЕОМ зв'язку; 3 - індикатор повітряної обстановки; 4 - локальна обчислювальна мережа; 5 - шина обміну; 61...6n - пристрої сполучення з РЛС; 71...7m - пристрої сполучення з командними пунктами підрозділів засобів захисту; 8 - обчислювач параметрів перехоплення, траєкторій наведення, маневрів цілей, відстаней між винищувачами і засобами повітряного нападу, часу перехоплення і шляхів польоту винищувачів; 9 - обчислювач параметрів конфліктних дуальних ситуацій «засіб повітряного нападу - об'єкт, що захищається»; 75122 10 10 – індикатор у координатах «номер конфліктної ситуації - час конфліктної ситуації». Заявлений спосіб керування повітряним рухом реалізується таким чином. Інформація про координати повітряних об'єктів (літаків, крилатих ракет) і параметри їхнього руху одержується за допомогою радіолокаційного комплексу, що включає радіолокаційні станції виявлення, наведення і супроводження, станції радіотехнічної розвідки. Ця інформація по каналам засобів зв'язку надходить в обчислювальний комплекс автоматизованої системи керування, де проводиться вторинна обробка отриманої інформації, а саме ідентифікуються повітряні об'єкти за ознаками "свій-чужий" і тактичне призначення, обчислюються параметри перехоплення, траєкторії наведення, маневрів цілей, відстані між положеннями повітряних засобів захисту і засобів повітряного нападу, часи перехоплення, довжини прямої атаки, здійснюється дуальний поділ конфліктних ситуацій «засіб повітряного нападу - об'єкт, що захищається», розрахунок параметрів конфліктних ситуацій об'єктів (підльотний час, час можливого контакту-атаки винищувальної авіації з засобом повітряного нападу, граничний час зльоту винищувальної авіації і/або час запуску ракет «земля-повітря» для атаки засобу повітряного нападу) і встановлення ступеня важливості керування ними. Інформація про рух повітряних суден відображається на екрані індикатора повітряної обстановки в реальних координатах з позначенням командних пунктів і об'єктів, що захищаються, наприклад, у виді, як показано на Фіг.1. Інформація про конфліктні ситуації відображається на додатковому індикаторі в координатах «номер дуальної конфліктної ситуації - час конфліктної ситуації», по одній координаті якого дискретно розташовані шкали, кожна з яких відповідає порядковому номеру дуальної пари «засіб повітряного нападу - об'єкт, що захищається», а по іншій координаті на часовій осі шкали, яка відповідає номеру дуальної пари, відображаються позначки об'єктів цієї дуальної пари (об'єкт, що захищається і засіб повітряного нападу), позначки параметрів конфліктної ситуації (підльотний час, граничний час зльоту винищувальної авіації, граничний час запуску ракет «земля-повітря», час зближення повітряних об'єктів) і формуляри, що ідентифікують об'єкти конфліктної ситуації, наприклад, у вигляді, як показано на Фіг.2. На часовій осі кожної шкали дуальної пари конфліктної ситуації позначку повітряного об'єкта, ідентифікованого із засобом нападу, відображають на початку відліку, позначку об'єкта, що захищається - наприкінці відліку, а між ними - позначки повітряних об'єктів, ідентифікованих із засобами захисту, і позначки параметрів конфліктної ситуації, при цьому відстань між позначкою повітряного об'єкта, що ідентифікується з засобом нападу, і позначкою об'єкта, що захищається, відповідає поточному часові підльоту засобу нападу до об'єкта, що захищається. Оператор-диспетчер (оператор центрального командного пункту) аналізує повітряну обстановку, по додатковому індикатору визначає ступінь першочерговості керування конфліктними ситуаціями, приймає командні рішення і передає 11 75122 12 команди керування на засоби захисту від повіт61...6n сполучення з РЛС і m пристроїв 71…7m ряного нападу - винищувачі, що патрулюють у сполучення з командними пунктами підрозділів повітрі, ракетні комплекси і засоби радіопротидії. засобів захисту. Обчислювач 9 з'єднаний з індиСтупінь важливості керування конфліктною ситукатором 10 у координатах «номер дуальної конацією з центрального командного пункту операфліктної ситуації - час конфліктної ситуації», на тор-диспетчер (оператор центрального командекрані якого по одній координаті дискретно розного пункту) визначає по відстані між позначкою ташовані шкали, кожна з яких відповідає порядповітряного об'єкта, ідентифікованого із засобом ковому номеру дуальної конфліктної ситуації, а нападу, і позначкою об'єкта, що захищається, по іншій координаті на часовій осі шкали, що віді/або позначкою засобу захисту. Рішення цієї заповідає номеру дуальної конфліктної ситуації, дачі спрощується тим, що шкали дуальних конфвідображені позначки параметрів конфліктної ліктних ситуацій з мінімальною відстанню між ситуації, позначки подій конфліктної ситуації і позначкою повітряного об'єкта, ідентифікованого формуляри, які ідентифікують об'єкти конфліктної із засобом нападу, і позначкою об'єкта, що захиситуації. щається, і/або позначкою засобу захисту виділяРоботу заявленої системи наведення виниються кольором, що привертає увагу. щувачів на повітряні цілі розглянемо на прикладі Дуальний поділ конфліктних ситуацій в обчиповітряної обстановки, приведеної на Фіг.1. Об'єслювальному комплексі автоматизованої системи кти, що захищаються -залізничний вузол міста керування здійснюється таким чином. З виявленХарцизьк, промисловий об'єкт у місті Гусельськ і ням повітряного об'єкта з ознакою «чужий», вигідроелектростанція Зугрес. Центральний команзначаються об'єкти, що захищаються, які можуть дний пункт дислокується в районі міста Харцизьпіддатися нападові, і виділяються учасники конка. Аеродроми винищувальної авіації (підрозділи фліктної ситуації - засіб нападу, об'єкт, що захи1 і 2) розташовані на передньому краї рубежу щається, і засоби захисту. Відстань між конфлікоборони, а зенітні ракетні комплекси (підрозділи 3 туючими об'єктами перетворюється у часовий і 4) -безпосередньо біля об'єктів, що які вони заінтервал з урахуванням їх швидкостей і напрямхищають, - станції Харцизьк і гідроелектростанції ків. Обчислюються параметри конфліктної ситуаЗугрес. Керування діями підрозділів захисту об'єції: час перехоплення, рубежі придушення, часи ктів здійснюється з центрального командного зближення. Кожній конфліктній ситуації надаєтьпункту (ЦКП). ся порядковий номер. Тому що інформація про Інформація про координати повітряних об'єккожну конфліктну ситуацію відображається на тів, виявлених радіолокаційними станціями окремому індикаторі в координатах «номер дуа(РЛС), їх державної приналежності і швидкості льної конфліктної ситуації - час конфліктної ситупольоту через пристрої сполучення 61...6n надхоації», а ступінь першочерговості керування конфдить в обчислювальний комплекс - обчислювач 8, ліктною ситуацією подається наочно - довжиною і що представляє собою один або кілька процесокольором лінії, що з'єднує, позначки засобу повірів, об'єднаних у локальну обчислювальну меретряного нападу, засобів захисту та об'єкта, що жу. З командних пунктів підрозділів через призахищається, істотно знижується ймовірність ухстрої сполучення 71...7m до обчислювача 8 валення помилкового рішення, підвищується надходить інформація про стан засобів захисту. ефективність протиповітряної оборони. Організацію обміну інформацією центрального Система наведення винищувачів на повітряні командного пункту з РЛС і командними пунктами цілі (Фіг.3) містить центральну ЕОМ 1, ЕОМ зв'язпідрозділів здійснює ЕОМ зв'язку 2. За інформаку 2, індикатор 3 повітряної обстановки, локальну цією від РЛС і командних пунктів підрозділів в обчислювальну мережу 4, шину обміну 5, приобчислювачі 8 здійснюється ідентифікація повітстрої 61...6n сполучення з РЛС, пристрої 71...7m ряних об'єктів, визначення маневрів цілей, розрасполучення з командними пунктами, обчислювач хунок їхніх траєкторій, визначення засобів захис8 параметрів перехоплення, траєкторій наведенту, розрахунок параметрів перехоплення, ня, маневрів цілей, відстаней між положеннями траєкторій наведення, відстаней між положеннявинищувачів і повітряних засобів нападу, часу ми винищувачів і повітряних засобів нападу, часу перехоплення і шляхів польоту винищувача, обперехоплення і шляхів польоту винищувача. Кочислювач 9 параметрів дуальних конфліктних жному засобу повітряного нападу, який перетнув ситуацій «засіб повітряного нападу - об'єкт, що кордон району, що захищається, надається позахищається» і індикатор 10 у координатах «норядковий номер. Оброблена інформація про рух мер дуальної конфліктної ситуації - час конфліктповітряних об'єктів – "своїх" і "чужих" - надходить ної ситуації». Порти введення-виведення центрау центральну ЕОМ 1 і відображається на екрані льної ЕОМ 1 з'єднані з відповідними входами індикатора 3 повітряної обстановки (Фіг.1) на фоіндикатора 5 повітряної обстановки і з локальною ні географічної сітки ППО з позначенням міст обчислювальною мережею 4, що з'єднана з ЕОМ дислокації командних пунктів підрозділів протизв'язку 2, обчислювачем 8 параметрів перехопвоповітряної оборони (КП ППО), зон їхньої дії, лення, траєкторій наведення, маневрів цілей, об'єктів, які вони захищають. Крім того, інформавідстаней між винищувачами і засобами повітряція про рух засобів нападу з обчислювача 8 у виді ного нападу, часу перехоплення і шляхів польоту географічних координат і швидкостей цілей надавинищувачів і обчислювачем 9 параметрів дуається в обчислювач 9. Обчислювач 9, здійснюючи льних конфліктних ситуацій «засіб повітряного дуальний поділ конфліктних ситуацій «засіб повінападу - об'єкт, що захищається». До ЕОМ зв'язтряного нападу - об'єкт, що захищається», переку 2 через шину обміну 5 підключені n пристроїв раховує цю інформацію у часові інтервали, виби 13 75122 14 рає найбільш імовірний об'єкт нападу і видає для противоповітряної оборони (ППО), обчислювачі 8 відображення на екрані індикатора 10 конфлікті 9 реалізуються на персональних комп'ютерах з них ситуацій (Фіг.2). При цьому, на екрані індикавідповідним програмним забезпеченням. Швидтора 10 відображається лінія розгортки часової кодія сучасних комп'ютерів дозволяє забезпечити осі. На початку цієї лінії розгортки часової осі віроботу цих обчислювачів у реальному масштабі дображається формуляр засобу повітряного начасу з обробкою до 1000 цілей. Індикатор 10 без паду, на кінці - номер найбільш імовірного об’єкта проблем реалізується на дисплеї персонального нападу, а на самій лінії розгортки відображається комп'ютера. позначка засобу повітряного нападу відповідно Перевірка ефективності запропонованого часу підльоту його до об'єкта нападу. Крім того, способу керування повітряним рухом і системи на лінії розгортки часової осі можуть відображанаведення винищувачів на повітряні цілі здійснютися позначки інших подій цієї конфліктної ситуавалася шляхом програмної імітації повітряної ції (наприклад, позначка граничного часу зльоту обстановки за допомогою персонального комп'ювинищувачів для атаки засобу повітряного натера, сполученого з двома дисплеями. На екрані паду). першого дисплея (Фіг.1) на фоні координатної Оператор - диспетчер ЦКП, аналізуючи повісітки відображалася інформація про положення тряну обстановку, призначає підрозділ і засоби об'єктів, що обороняються, засобів протиповітрязахисту об'єкта. При цьому, в районі розгортки ної оборони, часу і трас польоту повітряних цілей часової осі шкали з'являється зображення основи і винищувачів, а також трас планових польотів формуляра з номером засобу захисту і номером повітряних об'єктів. На екрані другого дисплея підрозділі, призначеного для захисту об'єкта. Піс(Фіг.2) відображалася інформація тільки про конля зльоту засобів захисту обчислювач 9 по даним фліктні ситуації в координатах "номер дуальної обчислювача 8 перераховує параметри конфлікконфліктної ситуації - час конфліктної ситуації". тних ситуацій і результати відображаються на Інформація на обох дисплеях змінювалася синхвідповідних осях часової шкали на екрані індикаронно. тора 10 у виді спеціальних позначок на лінії розУ ході експерименту імітувалося 10 нальотів гортки (наприклад, позначка часу “зустрічі” засобомбардувальників на три об'єкти з трьох напрябів повітряного нападу і засобів захисту) і мків. У кожному нальоті приймали участь від 6 до умовних знаків у формулярах. Наприклад, аналіз 10 груп бомбардувальників, інтервали між групаповітряної обстановки (Фіг.1 і Фіг.2) свідчить, що ми були від 3 до 10 хвилин. Схема кожного нагрупа бомбардувальників 6001 має наказ знищильоту формувалася комп'ютером заново і не поти Зугрес (об'єкт 01), група бомбардувальників вторювала попередню. 6003 націлена на Гусельськ (об'єкт 02), а носій В експерименті брало участь 10 операторів, крилатих ракет (КР) 6002 призначений для знищо пройшли попереднє навчання при роботі з щення Харцизька (об'єкт 00) за допомогою КР обома індикаторами. В обов'язок оператора вхо“повітря–земля” 6004. Тому на екрані індикатора дило - при виявленні цілі "чужий" призначити під10 виділені конфліктні ситуації 6001-01, 6003-02, розділ (номер) і кількість винищувачів або ракет 6004-00. Після старту КР бомбардувальник 6002 для ведення бойових дій. Зліт винищувачів імітуповернув на свою базу, ситуація перестала бути вався з затримкою в 1 хвилину після надходженконфліктною. Оператор-диспетчер ЦКП після ня команди. аналізу обстановки в 4.26 наказав командиру Оператори були розділені на дві групи по 5 підрозділу 02 підняти 15 винищувачів для зничоловік, одна з яких працювала тільки з першим щення групи бомбардувальників 6001, а також дисплеєм, а друга - з обома дисплеями. Після об'явив бойову готовність підрозділу 4 зенітнопроведення експерименту групи операторів поміракетного комплексу (ЗРК). В 4.51, після виявнялися місцями і експеримент повторювався знолення КР, наказав командиру підрозділу 03 ЗРК ву. знищити КР 6004 в умовах децентралізованого За результатами експерименту при викорискерування. В 4.53 наказав командиру підрозділу танні першого індикатора з загальної кількості 01 підняту 18 винищувачів для знищення групи 830 груп бомбардувальників унаслідок несвоєчабомбардувальників 6003. Після видачі розпорясної або неадекватної реакції операторів, до об'єджень на проведення бойових дій командирам ктів, що захищалися, було пропущено 17 груп підрозділів командир ЦКП має час для контролер (2,05%). При спільному використанні двох індикавиконання своїх наказів по кожній конфліктній торів, з 840 груп бомбардувальників до об'єктів, ситуації. Це забезпечує йому пропонований індищо захищалися, було пропущено 3 групи (0,36%). катор контролю конфліктних ситуацій. Отриманий результат свідчить, що наявність Заявлена система реалізується на відомих картини часового розвитку бойових дій, особливо технічних елементах. Центральна ЕОМ1, ЕОМ з виділенням небезпечних ситуацій, які потребузв'язку 2, пристрій сполучення 6 із РЛС і 7 з коють першочергового втручання, істотно знижує мандними пунктами підрозділів, індикатор повітймовірність прийняття запізнілих або помилкових ряної обстановки широко відомі і використовурішень, що підвищує ефективність системи ються в автоматизованих системах противопові(ППО). 15 Комп’ютерна верстка Т. Чепелева 75122 Підписне 16 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling air traffic and a system for the realization of the method
Автори англійськоюFedosenko Oleh Fedorovych
Назва патенту російськоюСпособ управления воздушным движением и система для осуществления способа
Автори російськоюФедосенко Олег Федорович
МПК / Мітки
МПК: G01S 13/91, G08G 7/00
Мітки: рухом, здійснення, керування, спосіб, повітряним, система
Код посилання
<a href="https://ua.patents.su/8-75122-sposib-keruvannya-povitryanim-rukhom-i-sistema-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування повітряним рухом і система для його здійснення</a>
Спосіб керування рухом поршня машини, пристрій для його здійснення і спосіб балансування цього пристрою
Номер патенту: 49973
Опубліковано: 15.10.2002
Автор: Негре Сіріл
МПК: F01B 9/02, F02B 75/32
Мітки: здійснення, цього, керування, пристрою, машини, спосіб, пристрій, рухом, балансування, поршня
Формула / Реферат:
1. Спосіб керування рухом поршня машини або компресора, або екологічно чистого двигуна, або двигуна, що характеризується пониженою токсичністю, який відрізняється тим, що рух поршня зупиняють, а сам поршень утримують в зоні верхньої мертвої точки у стані очікування протягом періоду часу, який дозволяє здійснити, у межах постійного об'єму, дії, при яких:- виконують операції запалювання та спалювання у двигунах з керованим процесом...
Комплексна система керування дорожнім рухом
Номер патенту: 9841
Опубліковано: 17.10.2005
Автор: Щуренко Юрій Олександрович
МПК: G08G 1/01
Мітки: рухом, дорожнім, система, керування, комплексна
Формула / Реферат:
1. Комплексна система керування дорожнім рухом, яка має центральний комп'ютер, до якого через канали зв'язку приєднані периферійні об'єкти, такі як світлофорні об'єкти, керовані дорожні знаки, детектори транспорту, детектори забруднення навколишнього середовища, відеокамери, інформаційні табло, приймальні пристрої абонентів, яка відрізняється тим, що система додатково включає міський та мобільний центр керування, транзитний сервер обміну,...
Система автоматичного керування рухом судна за курсом
Номер патенту: 54147
Опубліковано: 17.02.2003
Автор: Бугрім Леонід Іванович
МПК: B63B 49/00, B63H 25/00, B63B 45/00
Мітки: автоматичного, керування, рухом, судна, система, курсом
Формула / Реферат:
Система автоматичного керування рухом судна за курсом, що містить прилад керування, кермовий привід, у складі якого є виконавчий механізм, кермова машина, пристрій основного внутрішнього зворотного зв'язку, судно як об'єкт керування з пером керма, яка відрізняється тим, що в ній паралельно до виходу пристрою основного внутрішнього зворотного зв'язку установлено пристрій додаткового зворотного зв'язку і виходи пристроїв додаткового й основного...
Спосіб санкціонованого доступу до керування ліфтом і система для його здійснення
Номер патенту: 50616
Опубліковано: 15.12.2005
Автори: Тіщенко Олександр Юрійович, КОРЮНОВ ВАЛЕРІЙ ІВАНОВИЧ
МПК: B66B 3/00, B66B 1/00, G06F 3/00
Мітки: спосіб, санкціонованого, керування, ліфтом, система, здійснення, доступу
Формула / Реферат:
1. Спосіб санкціонованого доступу до керування ліфтом полягає в тому, що в кабіні ліфта за допомогою системи санкціонованого доступу зчитують з особистого електронного носія інформації пасажира його ідентифікаційні дані, згідно з отриманими даними визначають можливість або неможливість керування ліфтом, про що повідомляють за допомогою мовного інформатора, який відрізняється тим, що системою додатково контролюють облікову інформацію про...
Система керування рухом суден
Номер патенту: 5127
Опубліковано: 15.02.2005
Автори: Мальцев Анатолій Сідорович, Вільський Геннадій Борисович, Бездольний Віктор Володимирович, Романов Георгій Семенович, Гончаров Євген Іванович
МПК: G08G 7/00, B63B 43/00
Мітки: система, суден, рухом, керування
Формула / Реферат:
1. Система керування рухом суден, що містить координаційний центр керування судноплавством, забезпечений засобами радіозв'язку і засобами обробки та перетворення інформації, які мають електронно-обчислювальні машини, підключені до серверу координаційного центра, та пости регулювання рухом суден, на яких установлені радіолокаційні станції, засоби радіозв'язку та апаратно-програмний комплекс, забезпечений адаптером, електронно-обчислювальними...
Попередній патент: Спосіб одержання композитної матричної мембрани
Наступний патент: Гербіцидна композиція у формі водної емульсії та спосіб боротьби з ростом небажаної рослинності
Випадковий патент: Спосіб малоінвазивного лікування хронічної анальної тріщини без сфінктероспазму