Мобільний радіотехнічний комплекс
Номер патенту: 80506
Опубліковано: 25.09.2007
Автори: Ткаченко Василь Петрович, Єна Григорій Олександрович, Андрусенко Микола Іванович, Гузь Володимир Іванович, Білановський Михайло Миколайович, Ліпатов Валерій Павлович, Шовгун Віталій Андрійович


Формула / Реферат
1. Мобільний радіотехнічний комплекс, розміщений принаймні на двох рухомих просторово рознесених носіях, кожен з яких містить поєднані між собою пасивно-активну РЛС (П-А РЛС) і станцію збору інформації обробки та розподілу задач (ЗІОРЗ), яка містить приймальну антену, передавальну антену, пристрій керування антенами, приймач станції ЗІОРЗ, передавач, пристрій виділення інформації, синхронізатор, пристрій формування інформації, пристрій індикації станції ЗІОРЗ, формувач керуючих сигналів станції ЗІОРЗ, пристрій обробки та розподілу інформації, при цьому вихід приймальної антени підключений до входу приймача станції ЗІОРЗ, перший вихід якого підключений до першого входу пристрою виділення інформації, другий вихід підключений до першого входу пристрою індикації станції ЗІОРЗ, а третій вихід підключений до першого входу пристрою керування антенами, при цьому другий вхід та перший вихід пристрою виділення інформації підключені, відповідно, до першого виходу та першого входу синхронізатора, другий вхід якого підключений до першого виходу формувача керуючих сигналів станції ЗІОРЗ, другий вихід підключений до другого входу пристрою керування антенами, а третій вихід підключений до першого входу пристрою формування інформації, третій вхід пристрою керування антенами підключений до другого виходу формувача керуючих сигналів станції ЗІОРЗ, його перший вихід-вхід та другий вихід підключені, відповідно, до першого входу-виходу приймальної антени та першого входу передавальної антени, а його третій вихід з'єднаний з першим входом пристрою обробки та розподілу інформації та другим входом пристрою індикації станції ЗІОРЗ, другий вхід пристрою обробки та розподілу інформації підключений до третього виходу формувача керуючих сигналів станції ЗІОРЗ, третій вхід пристрою обробки та розподілу інформації та четвертий вхід пристрою керування антенами підключені до зовнішньої навігаційної системи, четвертий вхід пристрою обробки та розподілу інформації підключений до першого виходу П-А РЛС, п’ятий, шостий та сьомий входи пристрою обробки та розподілу інформації підключені, відповідно, до другого, третього виходів П-А РЛС та другого виходу пристрою виділення інформації, вихід пристрою формування інформації через передавач підключений до другого входу передавальної антени, другий, третій, четвертий та п’ятий виходи пристрою обробки та розподілу інформації підключені, відповідно, до третього входу пристрою індикації станції ЗІОРЗ, першого входу П-А РЛС, зовнішніх систем та першого входу формувача керуючих сигналів станції ЗІOPЗ, другий і третій входи-виходи та четвертий вхід формувача керуючих сигналів станції ЗІОРЗ з’єднані, відповідно, з першим і другим входом-виходом П-А РЛС та зовнішніми системами, а вихід передавальної антени та другий вхід приймальної антени радіозв’язком з’єднані з іншими станціями ЗІОРЗ мобільного радіотехнічного комплексу, який відрізняється тим, що до кожної станції ЗІОРЗ додатково введені формувач керуючого масиву та пристрій ущільнення інформації, вихід якого підключений до другого входу пристрою формування інформації, а перший вхід підключений до першого виходу пристрою обробки та розподілу інформації, другий вхід підключений до виходу формувача керуючого масиву, перший та другий входи якого з’єднані, відповідно, з додатковим шостим виходом пристрою обробки і розподілу інформації та з додатковим четвертим виходом формувача керуючих сигналів станції ЗІОРЗ.
2. Мобільний радіотехнічний комплекс за п. 1, який відрізняється тим, що пристрій обробки та розподілу інформації містить пристрій декодування, вимірювач дальності, схему вимірювання пеленга, перший формувач даних, другий формувач даних, пристрій розподілу інформації, пристрій вимірювання розбіжностей курсових систем, пристрій кодування, буферну пам'ять, пристрій обчислення та екстраполяції, пристрій спряження та пристрій ототожнювання, при цьому перший, другий, третій, четвертий, п’ятий входи та перший вихід пристрою ототожнювання з’єднані, відповідно, з виходом другого формувача даних, виходом пристрою декодування, першим виходом схеми вимірювання пеленга, виходом вимірювача дальності, першим виходом вимірювача розбіжностей курсових систем та першим входом пристрою розподілу інформації, другий, третій та четвертий входи якого підключені, відповідно, до виходу пристрою обчислення та екстраполяції, виходу пристрою декодування та другого виходу пристрою вимірювання розбіжностей курсових систем, перший, другий, третій, четвертий та п’ятий виходи пристрою розподілу інформації з’єднані, відповідно, з першим входом пристрою кодування, першим входом буферної пам’яті, першим входом пристрою обчислення та екстраполяції, входом пристрою спряження та першим входом пристрою вимірювання розбіжностей курсових систем, другий вхід та третій вихід якого з’єднані з першим виходом та першим входом схеми вимірювання пеленга, перший вихід пристрою вимірювання розбіжностей курсових систем підключений також до першого входу першого формувача даних, другий вхід якого з’єднаний з другим виходом схеми вимірювання пеленга, при цьому другий вхід схеми вимірювання пеленга є першим входом пристрою обробки та розподілу інформації, з’єднані між собою перший вхід пристрою декодування, перший вхід вимірювача дальності, третій вхід схеми вимірювання пеленга, п’ятий вхід пристрою розподілу інформації, другі входи пристрою кодування та буферної пам’яті є другим входом пристрою обробки та розподілу інформації, другий вхід пристрою обчислення та екстраполяції, шостий вхід пристрою ототожнювання, перший і другий входи другого формувача даних та поєднані між собою другий вхід пристрою декодування, другий вхід вимірювача дальності та четвертий вхід схеми вимірювання пеленга є, відповідно, третім, четвертим, п’ятим, шостим та сьомим входами пристрою обробки та розподілу інформації, а виходи пристрою кодування, буферної пам'яті, першого формувача даних, пристрою спряження, шостий вихід пристрою розподілу інформації та другий вихід пристрою ототожнювання є, відповідно, першим, другим, третім, четвертим, п’ятим та шостим виходами пристрою обробки та розподілу інформації.
Текст
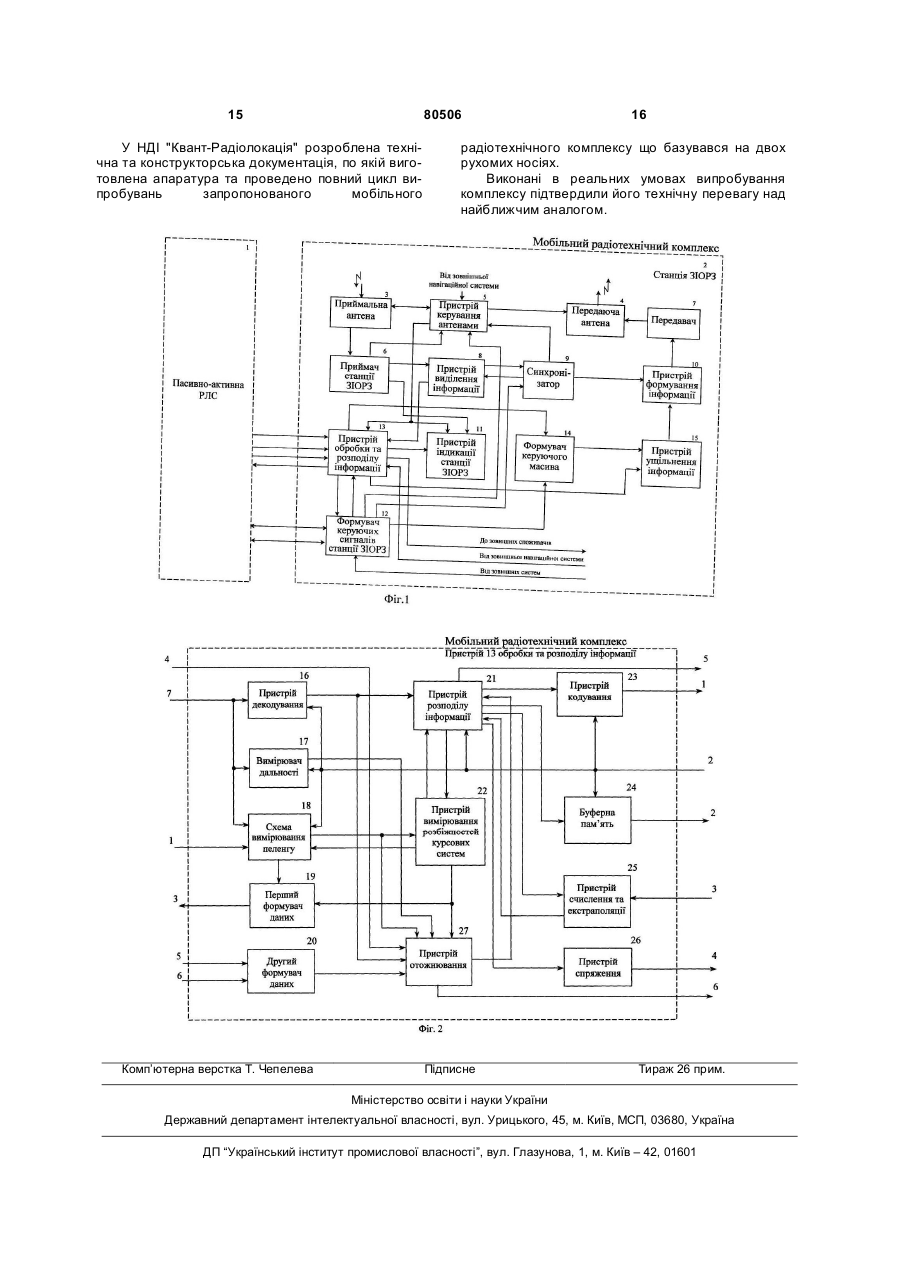
1. Мобільний радіотехнічний комплекс, розміщений принаймні на двох рухомих просторово рознесених носіях, кожен з яких містить поєднані між собою пасивно-активну РЛС (П-А РЛС) і станцію збору інформації обробки та розподілу задач (ЗІОРЗ), яка містить приймальну антену, передавальну антену, пристрій керування антенами, приймач станції ЗІОРЗ, передавач, пристрій виділення інформації, синхронізатор, пристрій формування інформації, пристрій індикації станції ЗІОРЗ, формувач керуючих сигналів станції ЗІОРЗ, пристрій обробки та розподілу інформації, при цьому вихід приймальної антени підключений до входу приймача станції ЗІОРЗ, перший вихід якого підключений до першого входу пристрою виділення інформації, другий вихід підключений до першого входу пристрою індикації станції ЗІОРЗ, а третій вихід підключений до першого входу пристрою керування антенами, при цьому другий вхід та перший вихід пристрою виділення інформації підключені, відповідно, до першого виходу та першого входу синхронізатора, другий вхід якого підключений до першого виходу формувача керуючих сигналів станції ЗІОРЗ, другий вихід підключений до другого входу пристрою керування антенами, а третій вихід підключений до першого входу пристрою формування інформації, третій вхід пристрою керування антенами підключений до другого виходу формувача керуючих сигналів станції ЗІОРЗ, його перший вихід-вхід та другий вихід підключені, відповідно, до першого входу-виходу приймальної антени та першого входу передавальної антени, а його третій вихід з'єднаний з пер 2 (19) 1 3 80506 4 кодування, буферну пам'ять, пристрій обчислення та екстраполяції, пристрій спряження та пристрій ототожнювання, при цьому перший, другий, третій, четвертий, п’ятий входи та перший вихід пристрою ототожнювання з’єднані, відповідно, з виходом другого формувача даних, виходом пристрою декодування, першим виходом схеми вимірювання пеленга, виходом вимірювача дальності, першим виходом вимірювача розбіжностей курсових систем та першим входом пристрою розподілу інформації, другий, третій та четвертий входи якого підключені, відповідно, до виходу пристрою обчислення та екстраполяції, виходу пристрою декодування та другого виходу пристрою вимірювання розбіжностей курсових систем, перший, другий, третій, четвертий та п’ятий виходи пристрою розподілу інформації з’єднані, відповідно, з першим входом пристрою кодування, першим входом буферної пам’яті, першим входом пристрою обчислення та екстраполяції, входом пристрою спряження та першим входом пристрою вимірювання розбіжностей курсових систем, другий вхід та третій вихід якого з’єднані з першим виходом та першим входом схеми вимірювання пеленга, перший вихід пристрою вимірювання розбіжностей курсових систем підключений також до першого входу першого формувача даних, другий вхід якого з’єднаний з другим виходом схеми вимірювання пеленга, при цьому другий вхід схеми вимірювання пеленга є першим входом пристрою обробки та розподілу інформації, з’єднані між собою перший вхід пристрою декодування, перший вхід вимірювача дальності, третій вхід схеми вимірювання пеленга, п’ятий вхід пристрою розподілу інформації, другі входи пристрою кодування та буферної пам’яті є другим входом пристрою обробки та розподілу інформації, другий вхід пристрою обчислення та екстраполяції, шостий вхід пристрою ототожнювання, перший і другий входи другого формувача даних та поєднані між собою другий вхід пристрою декодування, другий вхід вимірювача дальності та четвертий вхід схеми вимірювання пеленга є, відповідно, третім, четвертим, п’ятим, шостим та сьомим входами пристрою обробки та розподілу інформації, а виходи пристрою кодування, буферної пам'яті, першого формувача даних, пристрою спряження, шостий вихід пристрою розподілу інформації та другий вихід пристрою ототожнювання є, відповідно, першим, другим, третім, четвертим, п’ятим та шостим виходами пристрою обробки та розподілу інформації. Винахід належить до багатофункціональних радіотехнічних пристроїв, що забезпечують виявлення, вимірювання координат, параметрів руху, супровід надводних та повітряних об'єктів, а також висвітлення, аналіз радіотехнічної обстановки в зоні дії комплексу, взаємодію і керування в рамках єдиного інформаційного поля різнорідними засобами, що входять до складу даного комплексу. Винахід може застосовуватись для управління надводними чи повітряними об'єктами в морських чи припортових зонах, зонах аеропортів, а також для контролю та висвітлення ситуацій при охороні морських економічних зон, районів рибного промислу, та інше. Робота запропонованого мобільного радіотехнічного комплексу базується на отриманні та спільній обробці в режимі реального виміру часу інформації від різнорідних джерел. Відома пасивна система вимірювання координат джерел випромінювання, [патент на винахід UA 43433, G01S5/06, публ. 17.12.2001p.], яка містить декілька, як мінімум дві, просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв’язком з каналом зв’язку, вихід центрального поста є виходом системи, крім того, до кожної пеленгаторної станції система містить лічильник, накопичуючий суматор, подільник, дешифратор, постійний запам'ятовуючий пристрій (ПЗП), схему порівняння, схему віднімання і два ключі, при цьому другий вихід пеленгаторної станції з'єднаний з входами лічильника, накопичуючого суматора і через ключі - з входами схеми віднімання, накопичуючий суматор і подільник з'єднані послідовно, другий вхід подільника з'єднаний з виходом лічильника, вихід подільника з'єднаний з другим входом каналу зв’язку, другий вихід якого з'єднаний з входом дешифратора, який з'єднаний послідовно з ПЗП і схемою порівняння, вихід якої з'єднаний з входами обнуління накопичуючого суматора і лічильника, другий вхід схеми порівняння з'єднаний з виходом схеми віднімання, керуючі входи ключів з'єднані з виходом лічильника. Просторово рознесені пеленгаторні станції системи по команді центрального поста, яка передається каналом зв’язку, проводять пеленгування ВО на одній, загальній для всіх станцій частоті. Виміряні поточні значення пеленга ВО від пеленгаторних станцій передаються на центральний пост де з використанням бази між окремими пеленгаторними станціями, що визначається за допомогою каналу зв’язку, вимірюється поточна дальність до ВО. По каналам зв’язку величина дальності поступає до кожної позиції пеленгаторних станцій де враховується для уточнення наступних вимірів, за багаторазовими вимірами пеленга в центральному посту відбувається остаточне вимірювання дальності ВО, результат якого по каналах зв’язку надходить на пеленгаторні станції. Система не може виявляти та визначати координати об’єктів, що знаходяться в режимі радіомовчання. Окрім цього, відсутність активних радіолокаційних пристроїв не дає можливості реалізувати режим спільної обробки інформації від різнорідних джерел інформації, наприклад, активних і пасивних, що особливо важливо при роботі в умовах апріорної невизначеності відносно радіотехнічної та цільової обстановки в зоні розміщення системи. 5 Найбільш близьким по технічній суті і досяжному технічному результату є мобільний радіотехнічний комплекс, [патент КМ UА 14857, G01S13/86, пул. 15.05.2006р.]. Відомий мобільний радіотехнічний комплекс, розміщений принаймні на двох рухомих просторово рознесених носіях, кожен з яких містить поєднані між собою пасивно-активну радіолокаційну станцію (П-А РЛС) та станцію збору інформації, обробки і розподілу задач (ЗІОРЗ), яка містить приймальну антену, передаючу антену, пристрій керування антенами, приймач станції ЗІОРЗ, передавач, пристрій виділення інформації, синхронізатор, пристрій формування інформації, пристрій індикації станції ЗІОРЗ, формувач керуючих сигналів станції ЗІОРЗ, пристрій обробки та розподілу інформації, при цьому, вихід приймальної антени підключений до входу приймача станції ЗІОРЗ, перший вихід якого підключений до першого входу пристрою виділення інформації, другий вихід підключений до першого входу пристрою індикації станції ЗІОРЗ, а третій вихід підключений до першого входу пристрою керування антенами, другий вхід та перший вихід пристрою виділення інформації підключені відповідно до першого виходу та першого входу синхронізатора, другий вхід якого підключений до першого виходу формувача керуючих сигналів станції ЗІОРЗ, другий вихід підключений до другого входу пристрою керування антенами, а третій вихід підключений до першого входу пристрою формування інформації, третій вхід пристрою керування антенами підключений до другого виходу формувача керуючих сигналів станції ЗІОРЗ, його перший вихід-вхід та другий вихід відповідно підключені до першого входувиходу приймальної антени та першого входу передаючої антени, а його третій вихід з'єднаний з першим входом пристрою обробки та розподілу інформації та другим входом пристрою індикації станції ЗІОРЗ, другий вхід пристрою обробки та розподілу інформації підключений до третього виходу формувача керуючих сигналів станції ЗІОРЗ, третій вхід пристрою обробки та розподілу інформації та четвертий вхід пристрою керування антенами підключені до зовнішньої навігаційної системи, четвертий вхід пристрою обробки та розподілу інформації підключений до першого виходу П-А РЛС, п’ятий, шостий та сьомий входи пристрою обробки та розподілу інформації відповідно підключені до другого, третього виходів П-А РЛС та другого виходу пристрою виділення інформації, перший вихід пристрою обробки та розподілу інформації, через другий вхід пристрою формування інформації та передавач, підключений до другого входу передаючої антени, а його другий, третій, четвертий та п’ятий виходи відповідно підключені, до третього входу пристрою індикації станції ЗIOРЗ, першого входу П-А РЛС, зовнішніх систем та першого входу формувача керуючих сигналів станції ЗIOРЗ, другий та третій входи-виходи та четвертий вхід формувача керуючих сигналів станції ЗIOРЗ відповідно з'єднані, з першим та другим входом-виходом П-А РЛС та зовнішніми системами, а вихід передаючої антени та другий вхід приймальної антени радіозв'язком з'єднані з іншими 80506 6 станціями ЗIOРЗ мобільного радіотехнічного комплексу. Така побудова найближчого аналога забезпечує виявлення та вимірювання координат об'єктів що знаходяться в режимі радіомовчання і підвищення ефективності використання окремих просторово рознесених пасивно-активних радіолокаційних систем за рахунок: - попереднього розподілу простору (району), в якому базується комплекс, на визначені сектори (зони відповідальності) пошук об'єктів в яких здійснюють окремі П-А РЛС комплексу, при цьому, кожна П-А РЛС самостійно здійснює і частотний пошук в діапазонах радіохвиль в яких можуть працювати ВО. Дані про виявлені об’єкти від кожної ПА РЛС через станцію ЗIOРЗ передаються на ведучу (флагманську) станцію ЗIOРЗ комплексу, функції якої, по домовленості, може виконувати будь яка із станцій ЗIOРЗ комплексу; - створення на флагманській станції ЗIOРЗ мобільного комплексу загального інформаційного поля на базі даних, що надходять через станції ЗIOРЗ від кожної П-А РЛС ведених носіїв та отриманих іншими засобами інформації, реалізації на його основі спільної обробки інформації з метою оцінки цільової та радіотехнічної обстановки в районі базування комплексу, визначення пріоритетних секторів простору та об'єктів і організації керування режимами роботи окремих П-А РЛС в кожному секторі спостереження. На практиці, для забезпечення більшої ймовірності виявлення об'єктів та зменшення часу виявлення, за умови достатньої кількості окремих носіїв комплексу, сектори простору, пошук об’єктів в яких здійснюють окремі П-А РЛС, зачасто перекриваються. В цьому випадку на флагманську станцію ЗIOРЗ від ведених станцій поступає інформація (координати, радіотехнічні параметри) про одні і тіж виявлені об’єкти. В єдиному інформаційному полі найближчого аналога такі об’єкти будуть класифіковані як різні, що призводить до неоднозначного висвітлення ситуацій, необґрунтованого збільшення обсягів інформації якою обмінюються станції ЗIOРЗ, і як наслідок, утрудняє правильне прийняття рішень. Крім того, побудова станції ЗIOРЗ найближчого аналога обумовлює почергову передачу інформації від ведучої станції ЗIOРЗ на всі ведені, не дозволяє виключити з процесу обміну інформацією окремі станції ЗIOРЗ та окремі виявлені об’єкти, використання яких призводить до необґрунтованого збільшення часу обміну інформацією і, як наслідок, до застарівання даних. В основу винаходу поставлена задача створити мобільний радіотехнічний комплекс, побудова якого, в умовах використання забезпечувала б однозначне та прискорене формування єдиного інформаційного поля, скорочувала час та збільшувала ймовірність прийняття правильних рішень. Поставлена задача вирішується тим, що в кожну, поєднану з П-А РЛС станцію ЗIOРЗ мобільного радіотехнічного комплексу, розміщеного принаймні на двох рухомих просторово рознесених носіях, яка містить приймальну антену, передаючу антену, пристрій керування антенами, приймач 7 станції ЗIOРЗ, передавач, пристрій виділення інформації, синхронізатор, пристрій формування інформації, пристрій індикації станції ЗIOРЗ, формувач керуючих сигналів станції ЗIOРЗ, пристрій обробки та розподілу інформації, при цьому, вихід приймальної антени підключений до входу приймача станції ЗIOРЗ, перший вихід якого підключений до першого входу пристрою виділення інформації, другий вихід підключений до першого входу пристрою індикації станції ЗIOРЗ, а третій вихід підключений до першого входу пристрою керування антенами, другий вхід та перший вихід пристрою виділення інформації підключені відповідно до першого виходу та першого входу синхронізатора, другий вхід якого підключений до першого виходу формувача керуючих сигналів станції ЗIOРЗ, другий вихід підключений до другого входу пристрою керування антенами, а третій вихід підключений до першого входу пристрою формування інформації, третій вхід пристрою керування антенами підключений до другого виходу формувача керуючих сигналів станції ЗIOРЗ, його перший вихід-вхід та другий вихід відповідно підключені до першого входу-виходу приймальної антени та першого входу передаючої антени, а його третій вихід з'єднаний з першим входом пристрою обробки та розподілу інформації та другим входом пристрою індикації станції ЗIOРЗ, другий вхід пристрою обробки та розподілу інформації підключений до третього виходу формувача керуючих сигналів станції ЗIOРЗ, третій вхід пристрою обробки та розподілу інформації та четвертий вхід пристрою керування антенами підключені до зовнішньої навігаційної системи, четвертий вхід пристрою обробки та розподілу інформації підключений до першого виходу П-А РЛС, п’ятий, шостий та сьомий входи пристрою обробки та розподілу інформації відповідно підключені до другого, третього виходів П-А РЛС та другого виходу пристрою виділення інформації, вихід пристрою формування інформації через передавач, підключений до другого входу передаючої антени, другий, третій, четвертий та п’ятий виходи пристрою обробки та розподілу інформації, відповідно підключені, до третього входу пристрою індикації станції ЗIOРЗ, першого входу П-А РЛС, зовнішніх систем та першого входу формувача керуючих сигналів станції ЗIOРЗ, другий та третій входи-виходи та четвертий вхід формувача керуючих сигналів станції ЗIOРЗ відповідно з'єднані, з першим та другим входом-виходом П-А РЛС та зовнішніми системами, а вихід передаючої антени та другий вхід приймальної антени радіозв'язком з'єднані з іншими станціями ЗIOРЗ мобільного радіотехнічного комплексу, згідно винаходу додатково введений формувач керуючого масиву та пристрій ущільнення інформації, вихід якого підключений до другого входу пристрою формування інформації, перший вхід підключений до відомого першого виходу пристрою обробки та розподілу інформації, другий вхід підключений до виходу формувача керуючого масиву, перший та другий входи якого відповідно з'єднані з додатковим шостим виходом пристрою обробки та розподілу інформації та додатковим 80506 8 четвертим виходом формувача керуючих сигналів станції ЗIOРЗ. Крім того, в мобільному радіотехнічному комплексі згідно винаходу, пристрій обробки та розподілу інформації містить пристрій декодування, вимірювач дальності, схему вимірювання пеленга перший формувач даних, другий формувач даних, пристрій розподілу інформації, пристрій вимірювання розбіжностей курсових систем, пристрій кодування, буферну пам'ять, пристрій обчислення та екстраполяції, пристрій спряження та пристрій отожнювання, при цьому, перший, другий, третій, четвертий, п’ятий входи та перший вихід пристрою отожнювання відповідно з’єднані, з виходом другого формувача даних, виходом пристрою декодування, першим виходом схеми вимірювання пеленгу, виходом вимірювача дальності, першим виходом вимірювача розбіжностей курсових систем та першим входом пристрою розподілу інформації, другий, третій та четвертий входи якого підключені, відповідно, до виходу пристрою обчислення та екстраполяції, названого виходу пристрою декодування та другого виходу пристрою вимірювання розбіжностей курсових систем, перший, другий, третій, четвертий та п’ятий виходи пристрою розподілу інформації відповідно з’єднані, з першим входом пристрою кодування, першим входом буферної пам’яті, першим входом пристрою обчислення та екстраполяції, входом пристрою спряження та першим входом пристрою вимірювання розбіжностей курсових систем, другий вхід та третій вихід якого з’єднані з названим першим виходом та першим входом схеми вимірювання пеленга, названий перший вихід пристрою вимірювання розбіжностей курсових систем підключений, також, до першого входу першого формувача даних, другий вхід якого з'єднаний з другим виходом схеми вимірювання пеленга, другий вхід схеми вимірювання пеленга є першим входом пристрою обробки та розподілу інформації, з'єднані між собою перший вхід пристрою декодування, перший вхід вимірювача дальності, третій вхід схеми вимірювання пеленга, п’ятий вхід пристрою розподілу інформації, другі входи пристрою кодування та буферної пам’яті є другим входом пристрою обробки та розподілу інформації, другий вхід пристрою обчислення та екстраполяцій, шостий вхід пристрою отожнювання, перший та другий входи другого формувача даних та поєднані між собою другий вхід пристрою декодування, другий вхід вимірювача дальності та четвертий вхід схеми вимірювання пеленга є, відповідно, третім, четвертим, п’ятим та шостим, сьомим входами пристрою обробки та розподілу інформації, а виходи пристрою кодування, буферної пам'яті, першого формувача даних, пристрою спряження, шостий вихід пристрою розподілу інформації та другий вихід пристрою отожнювання є, відповідно, першим, другим, третім, четвертим, п’ятим та шостим виходами пристрою обробки та розподілу інформації. Така побудова мобільного радіотехнічного комплексу забезпечує в умовах використання однозначне та прискорене формування єдиного ін 9 формаційного поля, скорочує час та збільшує ймовірність прийняття правильних рішень. Суть винаходу пояснюється наступним описом та кресленнями, де: на Фіг.1 наведена блок-схема мобільного радіотехнічного комплексу; на Фіг.2 наведена блок-схема пристрою обробки та розподілу інформації. Однозначне та прискорене формування єдиного інформаційного поля і, як наслідок, скорочення часу та збільшення ймовірності прийняття правильних рішень по виявленим об'єктам, досягається за рахунок: - отожнювання на флагманській станції ЗIOРЗ інформації (координати, радіотехнічні параметри) про одні і тіж об’єкти виявлені пасивними РЛС різних носіїв комплексу, активними РЛС різних носіїв комплексу, пасивною РЛС одного носія і активною РЛС іншого носія чи апріорної інформації прийнятої від зовнішніх систем; - виключення з процесу обміну інформацією окремих ведених станцій ЗIOРЗ чи окремих виявлених об'єктів, використання яких призводить до необґрунтованого збільшення часу обміну інформацією і, як наслідок, до застарівання даних. Отожнювання об'єктів виконується на флагманській станції (ФС) ЗIOРЗ в процесі порівняння між собою перерахованих в систему координат ФС ЗIOРЗ, координат (пеленгу та дальності) об’єктів виявлених пасивними РЛС, активними РЛС, чи пасивною та активною РЛС різних носіїв комплексу. Два об'єкти будуть визнані як один і той же, якщо співпадають їх радіотехнічні параметри (несуча частота, частота повторювання, довжина імпульсів та інше - тільки для об'єктів виявлених пасивними РЛС) а різниця між їх перерахованими координатами не перевищує величину Δ, яка визначається за умови: (1) Δ£Ζ´Ö(d 12+d22) де, d 1, d 2 - середньоквадратичне значення похибки визначення координати (пеленгу чи дальності) РЛС різних носіїв - величина відома для активних та пасивних РЛС; Ζ - числовий коефіцієнт. В залежності від того, якими РЛС носіїв виявлений об’єкт - двома активними, активною і пасивною чи двома пасивними, може приймати значення 1, 2 або 3, оскільки похибки визначення координат об’єктів пасивними РЛС мають більшу величину. Виключення із процесу обміну інформацією окремих ведених станцій ЗІОРЗ, чи окремих виявлених об'єктів, здійснюється по команді від формувача керуючих сигналів флагманської станції ЗІОРЗ, що формується на основі аналізу єдиного інформаційного поля. Запропонований мобільний радіотехнічний комплекс, див. Фіг.1, розміщений принаймні на двох рухомих просторово рознесених носіях кожен з яких містить поєднані між собою П-А РЛС 1 та станцію ЗІОРЗ 2, яка містить приймальну антену 3, передаючу антену 4, пристрій 5 керування антенами, приймач 6 станції ЗІОРЗ, передавач 7, пристрій 8 виділення інформації, синхронізатор 9, пристрій 10 формування інформації, пристрій 11 індикації станції ЗІОРЗ, формувач 12 керуючих 80506 10 сигналів станції ЗІОРЗ, пристрій 13 обробки та розподілу інформації, формувач 14 керуючого масиву та пристрій 15 ущільнення інформації при цьому, вихід приймальної антени З підключений до входу приймача 6 станції ЗІОРЗ, перший вихід якого підключений до першого входу пристрою 8 виділення інформації, другий вихід підключений до першого входу пристрою 11 індикації станції ЗІОРЗ, а третій вихід підключений до першого входу пристрою 5 керування антенами, другий вхід та перший вихід пристрою 8 виділення інформації підключені відповідно до першого виходу та першого входу синхронізатора 9, другий вхід якого підключений до першого виходу формувача 12 керуючих сигналів станції ЗІОРЗ, другий вихід підключений до другого входу пристрою 5 керування антенами, а третій вихід підключений до першого входу пристрою 10 формування інформації, третій вхід пристрою 5 керування антенами підключений до другого виходу формувача 12 керуючих сигналів станції ЗІОРЗ, його перший вихід-вхід та другий вихід відповідно підключені до першого входувиходу приймальної антени 3 та першого входу передаючої антени 4, а його третій вихід з'єднаний з першим входом пристрою 13 обробки та розподілу інформації та другим входом пристрою 11 індикації станції ЗІОРЗ, другий вхід передаючої антени 4, через передавач 7 підключений до виходу пристрою формування інформації, другий вхід пристрою 13 обробки та розподілу інформації підключений до третього виходу формувача 12 керуючих сигналів станції ЗІОРЗ, третій вхід пристрою 13 обробки та розподілу інформації та четвертий вхід пристрою 5 керування антенами підключені до зовнішньої навігаційної системи, четвертий вхід пристрою 13 обробки та розподілу інформації підключений до першого виходу П-А РЛС 1, п’ятий, шостий та сьомий входи пристрою 13 обробки та розподілу інформації відповідно підключені до другого, третього виходів П-А РЛС 1 та другого виходу пристрою 8 виділення інформації, другий, третій, четвертий та п’ятий виходи пристрою 13 обробки та розподілу інформації, відповідно підключені, до третього входу пристрою 11 індикації станції ЗІОРЗ, першого входу П-А РЛС 1, зовнішніх систем та першого входу формувача 12 керуючих сигналів станції ЗІОРЗ, другий та третій входивиходи та четвертий вхід формувача 12 керуючих сигналів станції ЗІОРЗ відповідно з'єднані, з першим та другим входом-виходом П-А РЛС 1 та зовнішніми системами, а вихід передаючої антени 4 та другий вхід приймальної антени 3 радіозв'язком з'єднані з іншими станціями ЗIOРЗ 2 мобільного радіотехнічного комплексу, вихід пристрою 15 ущільнення інформації підключений до другого входу пристрою 10 формування інформації, перший вхід підключений до відомого першого виходу пристрою 13 обробки та розподілу інформації, другий вхід підключений до виходу формувача 14 керуючого масиву, перший та другий входи якого відповідно з'єднані з додатковим шостим виходом пристрою 13 обробки та розподілу інформації та додатковим четвертим виходом формувача 12 керуючих сигналів станції ЗIOРЗ. 11 Пристрій ІЗ обробки та розподілу інформації містить пристрій 16 декодування, вимірювач 17 дальності, схему 18 вимірювання пеленга, перший формувач 19 даних, другий формувач 20 даних, пристрій 21 розподілу інформації, пристрій 22 вимірювання розбіжностей курсових систем, пристрій 23 кодування, буферну пам'ять 24, пристрій 25 счисления та екстраполяції, пристрій 26 спряження та пристрій 27 отожнювання, при цьому, перший, другий, третій, четвертий, п’ятий входи та перший вихід пристрою 27 отожнювання відповідно з'єднані, з виходом другого формувача 20 даних, виходом пристрою 16 декодування, першим виходом схеми 18 вимірювання пеленга, виходом вимірювача 17 дальності, першим виходом вимірювача 22 розбіжностей курсових систем та першим входом пристрою 21 розподілу інформації, другий, третій та четвертий входи якого підключені, відповідно, до виходу пристрою 25 счисления та екстраполяції, названого виходу пристрою декодування та другого виходу пристрою 22 вимірювання розбіжностей курсових систем, перший, другий, третій, четвертий та п’ятий виходи пристрою 21 розподілу інформації відповідно з'єднані, з першим входом пристрою 23 кодування, першим входом буферної пам’яті 24, першим входом пристрою 25 счисления та екстраполяції, входом пристрою 26 спряження та першим входом пристрою 22 вимірювання розбіжностей курсових систем, другий вхід та третій вихід якого з'єднані з названим першим виходом та першим входом схеми 18 вимірювання пеленгу, названий перший вихід пристрою 22 вимірювання розбіжностей курсових систем підключений, також, до першого входу першого формувача 19 даних, другий вхід якого з'єднаний з другим виходом схеми 18 вимірювання пеленга, другий вхід схеми 18 вимірювання пеленга є першим входом пристрою 13 обробки та розподілу інформації, з'єднані між собою перший вхід пристрою 16 декодування, перший вхід вимірювача 17 дальності, третій вхід схеми 18 вимірювання пеленга, п’ятий вхід пристрою 21 розподілу інформації, другі входи пристрою 23 кодування та буферної пам’яті 24 є другим входом пристрою 13 обробки та розподілу інформації, другий вхід пристрою 25 счисления та екстраполяцій, шостий вхід пристрою 27 отожнювання, перший та другий входи другого формувача 20 даних та поєднані між собою другий вхід пристрою 16 декодування, другий вхід вимірювача 17 дальності та четвертий вхід схеми 18 вимірювання пеленгу є, відповідно, третім, четвертим, п’ятим та шостим, сьомим входами пристрою 13 обробки та розподілу інформації, а виходи пристрою 23 кодування, буферної пам'яті 24, першого формувача 19 даних, пристрою 26 спряження, шостий вихід пристрою 21 розподілу інформації та другий вихід пристрою отожнювання 27 є, відповідно, першим, другим, третім, четвертим, п’ятим та шостим виходами пристрою 13 обробки та розподілу інформації. Відмінність роботи пристрою 13 обробки та розподілу інформації флагманської станції ЗIOРЗ 2, від аналогічного пристрою найближчого аналога, обумовлена наявністю в його складі пристрою 27 отожнювання. 80506 12 Інформація, прийнята від ведених станцій ЗIOРЗ 2, містить адресну частину, яка визначає від якої станції вона прийнята, містить координати та радіотехнічні параметри об'єктів виявлених П-А РЛС 1 та ознаки, якими РЛС (пасивними чи активними) виявлені об’єкти, поступає на входи пристрою 27 отожнювання, на інші входи якого поступає інформація про виявлені об’єкти від П-А РЛС 1 сього носія, виміряні значення дальності та пеленгу кожної із ведених станцій ЗIOРЗ 2 та виміряні значення розбіжностей курсових систем носіїв флагманської та ведених станцій. З використанням названих величин пристрій 27 отожнювання: - рішенням тріангуляційних задач на площині перераховує координати об’єктів, прийнятих від ведених станцій ЗIOРЗ 2, в систему координат флагманського носія. Приклади рішення тріангуляційних задач наведено в ["Теоретические основы радиолокации" под ред. Я.Д.Ширмана, М., "Сов. радио", 1970г., Гл.8]. При рішенні задачі використовуються відомі значення дальності між флагманською та веденими станціями ЗIOРЗ 2, пеленги на ведені станції, пеленги та дальність виявлених об'єктів відносно веденої станції; - отожнює об’єкти з одинаковими радіотехнічними параметрами (тільки для об’єктів виявлених пасивними РЛС); - перераховані координати об'єктів з однаковими радіотехнічними параметрами, виявлених пасивними РЛС та об’єктів виявлених активними РЛС, провіряє на виконання умов формули (1). Два об’єкти, різниця між перерахованими координатами яких задовольняє умовам формули (1), отожнюються як один і той же. Всім виявленим об’єктам в пристрої 27 отожнювання присвоюється порядковий номер. Робота і побудова решти блоків пристрою 13 обробки та розподілу інформації співпадає з найближчим аналогом. Формувач 14 керуючого масиву, аналізуючи адресні частини формулярів даних виявлених і отожнених об’єктів, які обумовлюють з якими веденими станціями ЗIOРЗ 2 потрібно співпрацювати по даним об'єктам та присвоєні об'єктам порядкові номери, порівнює їх з адресними номерами ведених станцій ЗIOРЗ 2 та порядковими номерами об'єктів що поступили від формувача 12 керуючих сигналів для виключення з процесу обміну інформацією. Таким чином формується керуючий масив даних який містить: - номери ведених станцій ЗIOРЗ 2 в кількості K із Ν (Κ£Ν, Ν - загальна кількість ведених станцій ЗIOРЗ 2 мобільного комплексу) з якими флагманська станція ЗIOРЗ 2 обмінюється інформацією по виявленим об'єктам; - для кожної із K ведених станцій ЗIOРЗ 2 обумовлюються номери об'єктів в кількості В із С (В£С, С - загальна кількість об'єктів виявлених даною веденою станцією) по яким прийнято рішення продовжувати роботу, наприклад, об’єкт взято на супровід. Сформований керуючий масив з формувача 14 керуючого масиву, поступає на другий вхід пристрою 15 ущільнення інформації на перший вхід 13 якого, з пристрою 13 обробки та розподілу інформації, поступає весь масив інформації що може бути переданий на всі ведені станції ЗIOРЗ 2. Пристрій 15 ущільнення інформації аналізуючи керуючий масив: - виключає з процесу обміну інформацією окремі ведені станції ЗIOРЗ 2; - по номеру, присвоєному об’єкту в єдиному інформаційному полі, виключає із процесу обміну інформацією окремі назначені об’єкти. За рахунок зазначених дій зменшується загальний час обміну інформацією між флагманською та веденими станціями ЗIOРЗ 2 що задіяні в рішенні задач в районі базування комплексу. Всі пристрої мобільного радіотехнічного комплексу побудовані на сучасних радіоелементах, що виготовляються світовими виробниками такими як, AWANTEK, HEWLETT PACKARD, M/A COM, ANALOG DEVICES. Особливість роботи мобільного радіотехнічного комплексу обумовлюється побудовою станцій ЗIOРЗ 2 кожна з яких, по домовленості, може виконувати функції або ведучої, або веденої. Як правило, функції ведучої виконує станція ЗIOРЗ 2 яка розміщена на головному носії групи. Такий носій називається флагманським носієм (ФН), а станція називається флагманською станцією (ФС), інші станції ЗIOРЗ 2 називаються веденими (ВС). При розгортанні комплексу в просторі, наприклад, на N рухомих надводних носіях, ФС ЗIOРЗ 2 розподіляє можливу зону появи випромінюючих чи інших об’єктів на сектори пошуку. При достатній кількості носіїв сектори пошуку, особливо в пріоритетних напрямках, перекриваються декількома П-А РЛС 1, що збільшує ймовірність і скорочує час виявлення об’єктів в зоні розташування комплексу. Всі ВС ЗIOРЗ 2 безперервно підтримують зв’язок з ФС ЗIOРЗ 2, при цьому: - приймальні антени 3 ВС ЗIOРЗ 2 працюють в режимі автоматичного супроводу напрямку на ФС ЗIOРЗ 2 (її передаючу антену 4), забезпечуючи таким чином безперервний прийом інформації з ФС в умовах погодженого переміщення носіїв в просторі, дії бокової та кільової хитавиці. ВС ЗIOРЗ 2 вимірюють пеленг на ФС ЗIOРЗ 2, як пеленг рівносигнального напрямку їх приймальних антен 3 і передають його на ФС; - приймальна антена 3 ФС ЗIOРЗ 2 працює в режимі кругового обертання і проходячи напрямки на ВС ЗIOРЗ 2 почерзі приймає від них інформацію. За один прохід приймальною антеною 3 напрямку на кожну ВС флагманська станція ЗIOРЗ 2 встигає декілька разів прийняти пакети інформації від даної ВС і при кожному прийомі запам’ятовує поточне значення пеленга на дану ВС. Остаточне значення пеленгу даної ВС знаходиться як середнє значення пеленгів першого і останнього прийнятих пакетів інформації від даної ВС ЗIOРЗ 2; - ФС ЗIOРЗ 2 безперервно вимірює дальність до носіїв ведених станцій ЗIOРЗ 2. Вимірювання дальності здійснюється в пристрої 13 обробки та розподілу інформації за рахунок випромінювання ФС ЗIOРЗ 2 так званого пілот-сигнала, прийому і зворотного перевипромінювання його ВС ЗIOРЗ 2 та виміру на ФС проміжку часу між його випромі 80506 14 нюванням і зворотнім прийомом [див. Н.И.Филькенштейн «Основы радиолокации». М., «Сов. радио», 1973г.]. Інформація, яка містить координати та радіотехнічні параметри об'єктів виявлених П-А РЛС 1 ведених носіїв, веденими станціями ЗIOРЗ 2 радіозв'язком передається на ФС ЗIOРЗ 2, в якій пройшовши приймальний тракт поступає в пристрій 13 обробки та розподілу задач, а в ньому в пристрій 27 отожнювання. Пристрій 27 отожнювання, використовуючи визначені значення пеленгів, дальності ведених носіїв та розбіжності курсових систем, перераховує координати виявлених об’єктів, прийнятих від ведених станцій ЗIOРЗ 2, в систему координат носія флагманської станції ЗIOРЗ 2, отожнює об’єкти з однаковими радіотехнічними параметрами (тільки для об'єктів виявлених пасивними РЛС) і, аналізуючи перераховані координати на виконання умов формули (1), отожнює об’єкти. Всім виявленим та отожненим об'єктам приписуються порядкові номери. Адресні частини даних виявлених об'єктів, які містять його порядковий номер та номер носія яким виявлений даний об’єкт і з яким відбувається обмін інформацією по ньому, поступають в формувач 14 керуючого масиву на інший вхід якого з формувача 12 керуючих сигналів поступають номери ведених носіїв та порядкові номери виявлених об'єктів що виключаються з обміну. Сформований керуючий масив з формувача 14 керуючого масиву поступає в пристрій 15 ущільнення інформації на другий вхід якого, з пристрою 13 обробки та розподілу інформації поступає вся сформована в єдиному інформаційному полі інформація що може бути переданою веденим станціям ЗIOРЗ 2. Аналізуючи керуючий масив та адресні частини пакетів сформованої інформації, пристрій 15 ущільнення інформації виключає з обміну інформацією окремі ведені станції ЗIOРЗ 2 та окремі виявлені об’єкти. Таким чином, весь масив інформації що передається веденим носіям скорочується а темп обміну інформацією по виявленим об’єктам збільшується. Мобільний радіотехнічний комплекс, що заявляється, має технічну перевагу над найближчим аналогом, а саме, забезпечує однозначне та прискорене формування єдиного інформаційного поля і, як наслідок, скорочення часу та збільшення ймовірності прийняття правильних рішень по виявленим об’єктам. Названа технічна перевага досягається за рахунок: - отожнювання на флагманській станції ЗIOРЗ 2 інформації (координати, радіотехнічні параметри) про одні і тіж об’єкти виявлені пасивними РЛС різних носіїв комплексу, активними РЛС різних носіїв комплексу, пасивною РЛС одного носія і активною РЛС іншого носія чи апріорної інформації прийнятої від зовнішніх систем; - виключення з процесу обміну інформацією окремих ведених станцій ЗIOРЗ чи окремих виявлених об'єктів, використання яких призводить до необґрунтованого збільшення часу обміну інформацією і, як наслідок, до застарівання даних. 15 80506 У НДІ "Квант-Радіолокація" розроблена технічна та конструкторська документація, по якій виготовлена апаратура та проведено повний цикл випробувань запропонованого мобільного Комп’ютерна верстка Т. Чепелева 16 радіотехнічного комплексу що базувався на двох рухомих носіях. Виконані в реальних умовах випробування комплексу підтвердили його технічну перевагу над найближчим аналогом. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMobile radio-radar system
Автори англійськоюAndrusenko Mykola Ivanovych, Bilanovskyi Mykhailo Mykolaiovych, Huz Volodymyr Ivanovych, Yena Hryhorii Оlекsаndrоvусh, Lipatov Valerii Pavlovych, Tkachenko Vasyl Petrovych, Shovhun Vitalii Andriiovych
Назва патенту російськоюПодвижная радиотехническая система
Автори російськоюАндрусенко Николай Иванович, Билановский Михаил Николаевич, Гузь Владимир Иванович, Ена Григорий Александрович, Липатов Валерий Павлович, Ткаченко Василий Петрович, Шовгун Виталий Андреевич
МПК / Мітки
МПК: G01S 13/86
Мітки: комплекс, радіотехнічний, мобільній
Код посилання
<a href="https://ua.patents.su/8-80506-mobilnijj-radiotekhnichnijj-kompleks.html" target="_blank" rel="follow" title="База патентів України">Мобільний радіотехнічний комплекс</a>
Мобільний радіотехнічний комплекс
Номер патенту: 20170
Опубліковано: 15.01.2007
Автори: Шовгун Віталій Андрійович, Білановський Михайло Миколайович, Єна Григорій Олександрович, Ліпатов Валерій Павлович, Андрусенко Микола Іванович, Гузь Володимир Іванович, Ткаченко Василь Петрович
МПК: G01S 13/86
Мітки: мобільній, радіотехнічний, комплекс
Формула / Реферат:
1. Мобільний радіотехнічний комплекс, розміщений принаймні на двох рухомих просторово рознесених носіях, кожен з яких містить з’єднані між собою пасивно-активну РЛС (П-А РЛС) та станцію збору інформації обробки та розподілу завдань (ЗІОРЗ), яка містить приймальну антену, передавальну антену, пристрій керування антенами, приймач станції ЗІОРЗ, передавач, пристрій виділення інформації, синхронізатор, пристрій формування інформації, пристрій...
Мобільний радіотехнічний комплекс

Номер патенту: 14857
Опубліковано: 15.05.2006
Автори: Гузь Володимир Іванович, Черниш Станіслав Костянтинович, Нікітенко Юрій Гордійович, Андрусенко Микола Іванович, Білановський Михайло Миколайович, Біличенко Іван Федорович, Ткаченко Василь Петрович, Ліпатов Валерій Павлович, Шовгун Віталій Андрійович, Білокоз Сергій Сергійович, Єна Григорій Олександрович, Хоменко Микола Васильович, Толстіхін Микола Вікторович, Бутирін Анатолій Вікторович, Піронер Ян Михайлович
МПК: G01S 13/86
Мітки: радіотехнічний, комплекс, мобільній
Формула / Реферат:
1. Мобільний радіотехнічний комплекс, що містить принаймні дві, розміщені на рухомих просторово рознесених носіях, пасивно-активні радіолокаційні системи (П-А РЛС), кожна з яких містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового...
Мобільний радіотехнічний комплекс

Номер патенту: 80494
Опубліковано: 25.09.2007
Автори: Піронер Ян Михайлович, Черниш Станіслав Костянтинович, Андрусенко Микола Іванович, Ткаченко Василь Петрович, Ліпатов Валерій Павлович, Бутирін Анатолій Вікторович, Білокоз Сергій Сергійович, Шовгун Віталій Андрійович, Єна Григорій Олександрович, Толстіхін Микола Вікторович, Біличенко Іван Федорович, Гузь Володимир Іванович, Нікітенко Юрій Гордійович, Білановський Михайло Миколайович, Хоменко Микола Васильович
МПК: G01S 13/86
Мітки: радіотехнічний, комплекс, мобільній
Формула / Реферат:
1. Мобільний радіотехнічний комплекс, що містить принаймні дві, розміщені на рухомих просторово рознесених носіях, пасивно-активні радіолокаційні системи (П-А РЛС), кожна з яких містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового...
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти
Номер патенту: 48459
Опубліковано: 15.08.2002
Автори: Пазюк Олексій Вячеславович, Зеленков Олександр Аврамович, Соченко Петро Степанович
МПК: G01R 27/00, G01R 27/02
Мітки: індуктивності, потужності, ємності, вимірювач, повного, реактивного, активного, опору, частоти
Формула / Реферат:
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти, який містить послідовно з'єднані навантаження, еталонний резистор та перший блок вимірювань, в який входять перший, другий та третій квадратори, суматор, перший, другий та третій перетворювачі, перший та другий блоки ділення, перший, другий, третій та четвертий блоки множення та перший реєстратор, причому перший вивід навантаження з'єднаний з...
Конвеєрний пристрій
Номер патенту: 67652
Опубліковано: 15.06.2004
Автори: Лисогор Володимир Григорович, Дзісь Микола Вікторович, Мартинюк Тетяна Борисівна, Куперштейн Леонід Михайлович, Васюра Анатолій Степанович
МПК: G06F 7/575, G06F 7/38
Мітки: пристрій, конвеєрний
Формула / Реферат:
Конвеєрний пристрій, який складається з послідовно з'єднаних ярусів, кожний з яких містить регістр часткового результату, а шина тактових імпульсів пристрою з'єднана з входами встановлення тригерів, який відрізняється тим, що кожний і-тий ярус (і=1, ..., n, де n - кількість операндів) містить арифметично-логічний пристрій (АЛП), мультиплексор, а всі яруси, крім першого, містять мініматор та перший регістр, причому перший вхід і-го ярусу...
Попередній патент: Болт-стягувач для лікування перелому гомілкової кістки з розривом синдесмозу
Наступний патент: Дзеркало з карбіду кремнію
Випадковий патент: Зустрічно-штирьовий перетворювач поверхневих акустичних хвиль