Мобільний радіотехнічний комплекс
Номер патенту: 80494
Опубліковано: 25.09.2007
Автори: Біличенко Іван Федорович, Хоменко Микола Васильович, Піронер Ян Михайлович, Єна Григорій Олександрович, Гузь Володимир Іванович, Андрусенко Микола Іванович, Шовгун Віталій Андрійович, Білокоз Сергій Сергійович, Білановський Михайло Миколайович, Черниш Станіслав Костянтинович, Нікітенко Юрій Гордійович, Ліпатов Валерій Павлович, Ткаченко Василь Петрович, Бутирін Анатолій Вікторович, Толстіхін Микола Вікторович

Формула / Реферат
1. Мобільний радіотехнічний комплекс, що містить принаймні дві, розміщені на рухомих просторово рознесених носіях, пасивно-активні радіолокаційні системи (П-А РЛС), кожна з яких містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння, блок аналізу, формувач керуючих сигналів активного радіолокаційного каналу (АРЛК), формувач строба випромінювання, формувач зондуючих імпульсів, підсилювач потужності, приймач АРЛК та пристрій індикації АРЛК, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений до другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени та другий вхід першого блока обчислення відстані є входами системи, причому вихід антени компенсації бокового випромінювання через приймач компенсації бокового випромінювання підключений до другого входу блока порівняння, вихід антени компенсації фонового випромінювання через приймач компенсації фонового випромінювання підключений до третього входу блока порівняння, вихід якого підключений до першого входу блока визначення кутових координат, другий та третій, а також п'ятий виходи блока визначення кутових координат підключені до входів блока аналізу, вихід якого підключений до четвертого входу пристрою індикації, вихід приводу антени підключений до перших входів антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, другі входи яких та четвертий вхід антени підключені до третього виходу формувача керуючих сигналів, а третій вхід антени з'єднаний з третіми входами антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, при цьому перший вхід формувача керуючих сигналів АРЛК підключений до четвертого виходу формувача керуючих сигналів, додаткові четвертий та п’ятий виходи якого, відповідно, підключені до першого входу формувача керуючих сигналів АРЛК та п'ятого входу антени, другий та третій виходи формувача керуючих сигналів АРЛК підключені, відповідно, до першого входу підсилювача потужності та входу формувача зондуючих імпульсів, другий вхід формувача керуючих імпульсів АРЛК підключений до першого виходу формувача строба випромінювання, другий вихід якого підключений до першого входу пристрою індикації АРЛК, перший вхід формувача строба випромінювання та другий вхід пристрою індикації АРЛК з'єднані з першим виходом датчика сканування антени, другий вхід формувача строба випромінювання з'єднаний з другим виходом блока визначення кутових координат, перший вихід формувача зондуючих імпульсів підключений до другого входу підсилювача потужності, перший вихід якого підключений до шостого входу-виходу антени, а другий вихід підключений до першого входу приймача АРЛК, другий вхід приймача АРЛК підключений до другого виходу формувача зондуючих імпульсів, а його вихід підключений до третього входу пристрою індикації АРЛК, який відрізняється тим, що до кожної П-А РЛС додатково введені блок формування даних та станція збору інформації, обробки та розподілу задач (ЗІОРЗ), що містить приймальну антену, передавальну антену, пристрій керування антенами, приймач станції ЗІОРЗ, передавач, пристрій виділення інформації, синхронізатор, пристрій формування інформації, пристрій індикації станції ЗІОРЗ, формувач керуючих сигналів станції ЗІОРЗ, пристрій обробки та розподілу інформації, при цьому вихід приймальної антени підключений до входу приймача станції ЗІОРЗ, перший вихід якого підключений до першого входу пристрою виділення інформації, другий вихід підключений до першого входу пристрою індикації станції ЗІОРЗ, а третій вихід підключений до першого входу пристрою керування антенами, другий вхід та перший вихід пристрою виділення інформації підключені, відповідно, до першого виходу та першого входу синхронізатора, другий вхід якого підключений до першого виходу формувача керуючих сигналів станції ЗІОРЗ, другий вихід підключений до другого входу пристрою керування антенами, а третій вихід підключений до першого входу пристрою формування інформації, третій вхід пристрою керування антенами підключений до другого виходу формувача керуючих сигналів станції ЗІОРЗ, його перший вихід-вхід та другий вихід підключені, відповідно, до першого входу-виходу приймальної антени та першого входу передавальної антени, а його третій вихід з'єднаний з першим входом пристрою обробки та розподілу інформації та другим входом пристрою індикації станції ЗІОРЗ, другий вхід пристрою обробки та розподілу інформації підключений до третього виходу формувача керуючих сигналів станції ЗІОРЗ, третій вхід пристрою обробки та розподілу інформації та четвертий вхід пристрою керування антенами підключені до зовнішньої навігаційної системи, четвертий вхід пристрою обробки та розподілу інформації підключений до виходу додатково введеного блока формування даних, перший, другий та третій входи якого з'єднані, відповідно, з додатковим четвертим виходом формувача керуючих сигналів АРЛК, з першим виходом датчика сканування антени та виходом приймача АРЛК, п'ятий, шостий та сьомий входи пристрою обробки та розподілу інформації підключені, відповідно, до виходу першого блока обчислення відстані, першого виходу блока визначення кутових координат та другого виходу пристрою виділення інформації, перший вихід пристрою обробки та розподілу інформації через другий вхід пристрою формування інформації та передавач підключений до другого входу передавальної антени, а його другий, третій, четвертий та п'ятий виходи підключені, відповідно, до третього входу пристрою індикації станції ЗІОРЗ, другого входу першого блока обчислення відстані зовнішніх систем та першого входу формувача керуючих сигналів станції ЗІОРЗ, другий і третій входи-виходи та четвертий вхід формувача керуючих сигналів станції ЗІОРЗ з’єднані, відповідно, з додатковим другим входом-виходом формувача керуючих сигналів, додатковим третім входом-виходом формувача керуючих сигналів АРЛК та зовнішніми системами, додатковий шостий вихід формувача керуючих сигналів з'єднаний з додатковим третім входом датчика сканування антени, а вихід передавальної антени та другий вхід приймальної антени з’єднані радіозв’язком з іншими станціями ЗІОРЗ мобільного радіотехнічного комплексу.
2. Мобільний радіотехнічний комплекс за п. 1, який відрізняється тим, що пристрій виділення інформації містить порогову схему, пристрій підстроювання фази, формувач тактової частоти, узгоджений фільтр, формувач меандру прийому, пристрій керування та схему виділення символів, при цьому вихід порогової схеми через послідовно з’єднані узгоджений фільтр та формувач меандру прийому підключений до першого входу пристрою керування, вихід якого підключений до першого входу схеми виділення символів, вихід порогової схеми підключений до другого входу схеми виділення символів та через пристрій підстроювання фази до формувача тактової частоти, перший та другий виходи якого підключені, відповідно, до другого входу пристрою підстроювання фази та третього входу схеми виділення символів, крім того, вхід порогової схеми є першим входом, другий вхід пристрою керування є другим входом пристрою виділення інформації, а третій вихід формувача тактової частоти та вихід схеми виділення символів є, відповідно, його першим та другим виходами.
3. Мобільний радіотехнічний комплекс за п. 1, який відрізняється тим, що пристрій обробки та розподілу інформації містить пристрій декодування, вимірювач дальності, схему вимірювання пеленга, перший формувач даних, другий формувач даних, пристрій розподілу інформації, пристрій вимірювання розбіжностей курсових систем, пристрій кодування, буферну пам'ять, пристрій обчислення і екстраполяції та пристрій спряження, при цьому перший, другий, третій, четвертий та п'ятий входи пристрою розподілу інформації з'єднані, відповідно, з виходами пристрою декодування, другого формувача даних, вимірювача дальності, першим виходом пристрою вимірювання розбіжностей курсових систем та виходом пристрою обчислення і екстраполяції, перший вхід якого та перші входи пристрою вимірювання розбіжностей курсових систем, пристрою кодування, буферної пам'яті та пристрою спряження з'єднані, відповідно, з першим, другим, третім, четвертим та п'ятим виходами пристрою розподілу інформації, другий вхід пристрою вимірювання розбіжностей курсових систем з'єднаний з першим виходом схеми вимірювання пеленга, а його другий та третій виходи з'єднані, відповідно, з першим входом схеми вимірювання пеленга та першим входом першого формувача даних, другий вхід якого з'єднаний з другим виходом схеми вимірювання пеленга, крім того, другий вхід схеми вимірювання пеленга є першим входом пристрою обробки та розподілу інформації, при цьому з’єднані між собою перші входи пристрою декодування та вимірювача дальності, третій вхід схеми вимірювання пеленга, шостий вхід пристрою розподілу інформації, другі входи пристрою кодування та буферної пам'яті є другим входом пристрою обробки та розподілу інформації, другий вхід пристрою обчислення та екстраполяції, сьомий вхід пристрою розподілу інформації, перший та другий входи другого формувача даних, а також з'єднані між собою другий вхід пристрою декодування, другий вхід вимірювача дальності та четвертий вхід схеми вимірювання пеленга є, відповідно, третім, четвертим, п'ятим, шостим та сьомим входами пристрою обробки та розподілу інформації, а виходи пристрою кодування, буферної пам'яті, першого формувача даних, пристрою спряження та шостий вихід пристрою розподілу інформації є, відповідно, першим, другим, третім, четвертим та п’ятим виходами пристрою обробки та розподілу інформації.
Текст
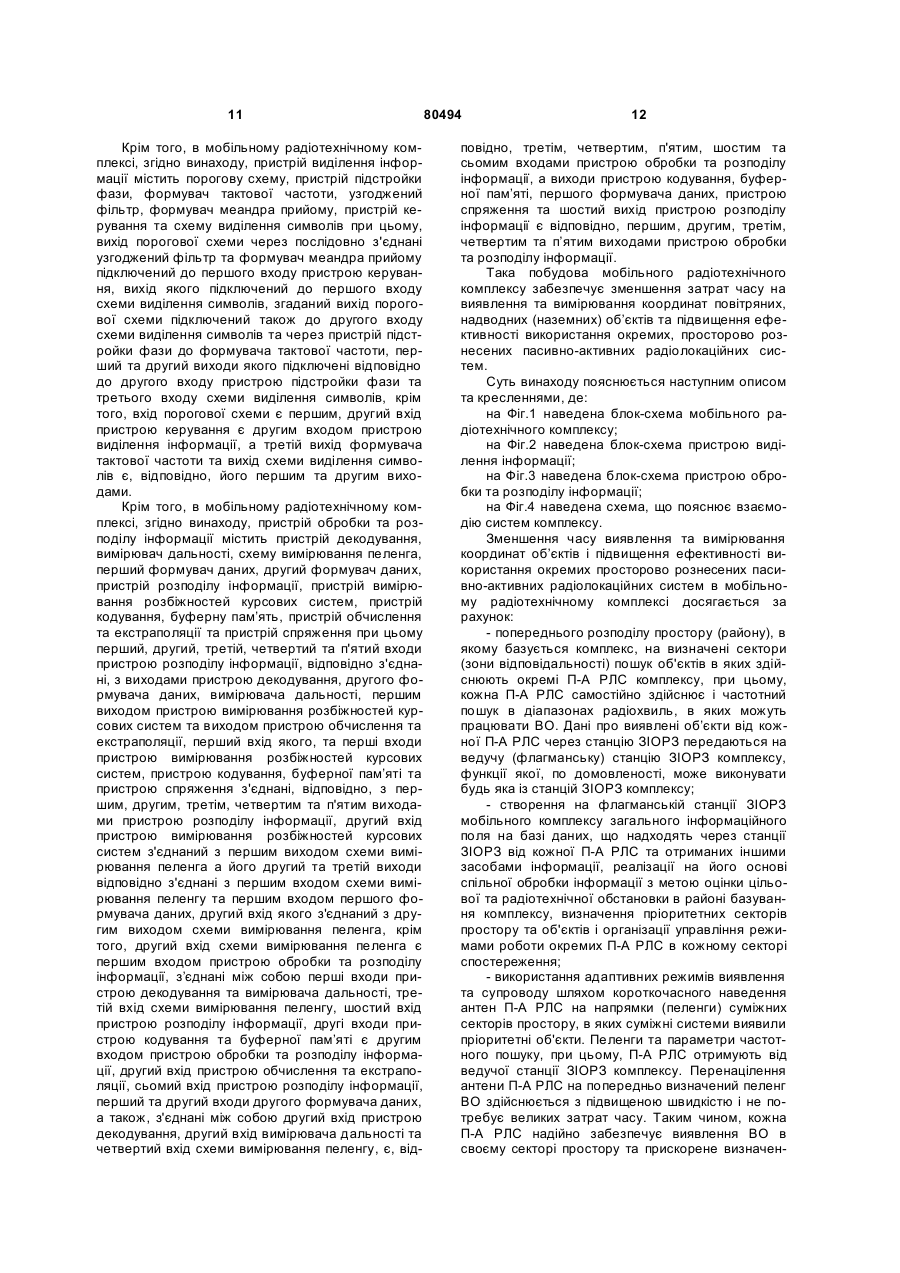
1. Мобільний радіотехнічний комплекс, що містить принаймні дві, розміщені на рухомих просторово рознесених носіях, пасивно-активні радіолокаційні системи (П-А РЛС), кожна з яких містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння, блок аналізу, формувач керуючих сигналів активного радіолокаційного каналу (АРЛК), формувач строба випромінювання, формувач зондуючих імпульсів, підсилювач потужності, приймач АРЛК та пристрій індикації АРЛК, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключе 2 (19) 1 3 входу-виходу антени, а другий вихід підключений до першого входу приймача АРЛК, другий вхід приймача АРЛК підключений до другого виходу формувача зондуючих імпульсів, а його вихід підключений до третього входу пристрою індикації АРЛК, який відрізняється тим, що до кожної П-А РЛС додатково введені блок формування даних та станція збору інформації, обробки та розподілу задач (ЗІОРЗ), що містить приймальну антену, передавальну антену, пристрій керування антенами, приймач станції ЗІОРЗ, передавач, пристрій виділення інформації, синхронізатор, пристрій формування інформації, пристрій індикації станції ЗІОРЗ, формувач керуючих сигналів станції ЗІОРЗ, пристрій обробки та розподілу інформації, при цьому вихід приймальної антени підключений до входу приймача станції ЗІОРЗ, перший вихід якого підключений до першого входу пристрою виділення інформації, другий вихід підключений до першого входу пристрою індикації станції ЗІОРЗ, а третій вихід підключений до першого входу пристрою керування антенами, другий вхід та перший вихід пристрою виділення інформації підключені, відповідно, до першого виходу та першого входу синхронізатора, другий вхід якого підключений до першого виходу формувача керуючих сигналів станції ЗІОРЗ, другий вихід підключений до другого входу пристрою керування антенами, а третій вихід підключений до першого входу пристрою формування інформації, третій вхід пристрою керування антенами підключений до другого виходу формувача керуючих сигналів станції ЗІОРЗ, його перший вихід-вхід та другий вихід підключені, відповідно, до першого входу-виходу приймальної антени та першого входу передавальної антени, а його третій вихід з'єднаний з першим входом пристрою обробки та розподілу інформації та другим входом пристрою індикації станції ЗІОРЗ, другий вхід пристрою обробки та розподілу інформації підключений до третього виходу формувача керуючих сигналів станції ЗІОРЗ, третій вхід пристрою обробки та розподілу інформації та четвертий вхід пристрою керування антенами підключені до зовнішньої навігаційної системи, четвертий вхід пристрою обробки та розподілу інформації підключений до виходу додатково введеного блока формування даних, перший, другий та третій входи якого з'єднані, відповідно, з додатковим четвертим виходом формувача керуючих сигналів АРЛК, з першим виходом датчика сканування антени та виходом приймача АРЛК, п'ятий, шостий та сьомий входи пристрою обробки та розподілу інформації підключені, відповідно, до виходу першого блока обчислення відстані, першого виходу блока визначення кутових координат та другого виходу пристрою виділення інформації, перший вихід пристрою обробки та розподілу інформації через другий вхід пристрою формування інформації та передавач підключений до другого входу передавальної антени, а його другий, третій, четвертий та п'ятий виходи підключені, відповідно, до третього входу пристрою індикації станції ЗІОРЗ, другого входу першого блока обчислення відстані зовнішніх систем та першого входу формувача керуючих сигналів станції ЗІОРЗ, другий і третій входи 80494 4 виходи та четвертий вхід формувача керуючих сигналів станції ЗІОРЗ з’єднані, відповідно, з додатковим другим входом-виходом формувача керуючих сигналів, додатковим третім входом-виходом формувача керуючих сигналів АРЛК та зовнішніми системами, додатковий шостий вихід формувача керуючих сигналів з'єднаний з додатковим третім входом датчика сканування антени, а вихід передавальної антени та другий вхід приймальної антени з’єднані радіозв’язком з іншими станціями ЗІОРЗ мобільного радіотехнічного комплексу. 2. Мобільний радіотехнічний комплекс за п. 1, який відрізняється тим, що пристрій виділення інформації містить порогову схему, пристрій підстроювання фази, формувач тактової частоти, узгоджений фільтр, формувач меандру прийому, пристрій керування та схему виділення символів, при цьому вихід порогової схеми через послідовно з’єднані узгоджений фільтр та формувач меандру прийому підключений до першого входу пристрою керування, вихід якого підключений до першого входу схеми виділення символів, вихід порогової схеми підключений до другого входу схеми виділення символів та через пристрій підстроювання фази до формувача тактової частоти, перший та другий виходи якого підключені, відповідно, до другого входу пристрою підстроювання фази та третього входу схеми виділення символів, крім того, вхід порогової схеми є першим входом, другий вхід пристрою керування є другим входом пристрою виділення інформації, а третій вихід формувача тактової частоти та вихід схеми виділення символів є, відповідно, його першим та другим виходами. 3. Мобільний радіотехнічний комплекс за п. 1, який відрізняється тим, що пристрій обробки та розподілу інформації містить пристрій декодування, вимірювач дальності, схему вимірювання пеленга, перший формувач даних, другий формувач даних, пристрій розподілу інформації, пристрій вимірювання розбіжностей курсових систем, пристрій кодування, буферну пам'ять, пристрій обчислення і екстраполяції та пристрій спряження, при цьому перший, другий, третій, четвертий та п'ятий входи пристрою розподілу інформації з'єднані, відповідно, з виходами пристрою декодування, другого формувача даних, вимірювача дальності, першим виходом пристрою вимірювання розбіжностей курсових систем та виходом пристрою обчислення і екстраполяції, перший вхід якого та перші входи пристрою вимірювання розбіжностей курсових систем, пристрою кодування, буферної пам'яті та пристрою спряження з'єднані, відповідно, з першим, другим, третім, четвертим та п'ятим виходами пристрою розподілу інформації, другий вхід пристрою вимірювання розбіжностей курсових систем з'єднаний з першим виходом схеми вимірювання пеленга, а його другий та третій виходи з'єднані, відповідно, з першим входом схеми вимірювання пеленга та першим входом першого формувача даних, другий вхід якого з'єднаний з другим виходом схеми вимірювання пеленга, крім того, другий вхід схеми вимірювання пеленга є першим входом пристрою обробки та розподілу інформації, при цьому з’єднані між собою перші 5 80494 6 входи пристрою декодування та вимірювача дальності, третій вхід схеми вимірювання пеленга, шостий вхід пристрою розподілу інформації, другі входи пристрою кодування та буферної пам'яті є другим входом пристрою обробки та розподілу інформації, другий вхід пристрою обчислення та екстраполяції, сьомий вхід пристрою розподілу інформації, перший та другий входи другого формувача даних, а також з'єднані між собою другий вхід пристрою декодування, другий вхід вимірюва ча дальності та четвертий вхід схеми вимірювання пеленга є, відповідно, третім, четвертим, п'ятим, шостим та сьомим входами пристрою обробки та розподілу інформації, а виходи пристрою кодування, буферної пам'яті, першого формувача даних, пристрою спряження та шостий вихід пристрою розподілу інформації є, відповідно, першим, другим, третім, четвертим та п’ятим виходами пристрою обробки та розподілу інформації. Винахід належить до багатофункціональних радіотехнічних пристроїв, що забезпечують виявлення, вимірювання координат, параметрів руху, супровід, надводних та повітряних об’єктів, а також висвітлення, аналіз радіотехнічної обстановки в зоні дії комплексу, взаємодію і керування в рамках єдиного інформаційного поля різнорідними засобами, що входять до складу даного комплексу. Винахід може застосовуватись для управління надводними чи повітряними об'єктами в морських чи припортових зонах, зонах аеропортів, а також для контролю та висвітлення ситуацій при охороні морських економічних зон, районів рибного промислу, та інше. Робота запропонованого мобільного радіотехнічного комплексу базується на отриманні та спільній обробці в режимі реального виміру часу інформації від різнорідних джерел: - пасивних радіолокаційних пристроїв, які забезпечують виявлення надводних чи повітряних носіїв випромінюючих об'єктів (ВО) за рахунок прийому радіосигналів, випромінюваних їх бортовими радіотехнічними системами, наприклад радіонавігаційними; - активних радіолокаційних пристроїв, за рахунок випромінювання зондуючих сигналів, прийому та обробки відбитих від об’єктів сигналів; - апріорних даних про координати та параметри руху об’єктів, отриманих наприклад, з відомого розкладу чи маршруту їх руху; - передбачуваних та оперативних даних, отриманих від інших джерел інформації. Відома пасивна система вимірювання координат джерел випромінювання, [патент на винахід UA 43433, G01S 5/06, публ. 17.12.2001], яка містить декілька, як мінімум дві, просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв’язком з каналом зв’язку, вихід центрального поста є виходом системи, крім того, до кожної пеленгаторної станції система містить лічильник, накопичуючий суматор, подільник, дешифратор, постійний запам'ятовуючий пристрій (ПЗП), схему порівняння, схему віднімання і два ключі, при цьому другий вихід пеленгаторної станції з'єднаний з входами лічильника, накопичуючого суматора і через ключі - з входами схеми віднімання, накопичуючий суматор і подільник з’єднані послідовно, другий вхід подільника з'єднаний з виходом лічильника, вихід подільника з'єднаний з другим входом каналу зв’язку, другий вихід якого з’єднаний з входом дешифратора, який з’єднаний послідовно з ПЗП і схемою порівняння, вихід якої з'єднаний з входами обнулення накопичуючого суматора і лічильника, другий вхід схеми порівняння з'єднаний з виходом схеми віднімання, керуючі входи ключів з'єднані з виходом лічильника. Просторово рознесені пеленгаторні станції системи по команді центрального поста, яка передається каналом зв’язку, проводять пеленгування ВО на одній, загальній для всіх станцій частоті. Виміряні поточні значення пеленга ВО від пеленгаторних станцій передаються на центральний пост, де, з використанням бази між окремими пеленгаторними станціями, що визначається за допомогою каналу зв’язку, вимірюється поточна дальність до ВО. По каналам зв’язку величина дальності поступає до кожної позиції пеленгаторних станцій, де враховується для уточнення послідуючих вимірів. По багаторазових вимірах пеленга в центральному посту відбувається остаточне вимірювання дальності ВО, результат якого по каналам зв’язку поступає на пеленгаторні станції. Система не може виявляти та визначати координати об’єктів, що знаходяться в режимі радіомовчання. Окрім цього, відсутність активних радіолокаційних пристроїв не дає можливості реалізувати режим спільної обробки інформації від різнорідних джерел інформації, наприклад, активних і пасивних, що особливо важливо при роботі в умовах апріорної невизначеності відносно радіотехнічної та цільової обстановки в зоні розміщення системи. Найбільш близька по технічній суті і досяжному технічному результату є пасивно-активна радіолокаційна система, [патент на корисну модель UА 12292, G01S 13/86, публ. 16.01.2006]. Відома пасивно-активна радіолокаційна система містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння, блок аналізу, формувач керуючих сигналів активного радіолокаційного каналу (АРЛК), формувач стробу випромінювання, формувач зондуючих імпульсів, підсилювач потужності, приймач 7 АРЛК та пристрій індикації АРЛК, при цьому, перший вхід антени, через привід антени, підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і першого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений до другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени, та другий вхід першого блока обчислення відстані, є входами системи, вихід антени компенсації бокового випромінювання, через приймач компенсації бокового випромінювання, підключений до другого входу блока порівняння, вихід антени компенсації фонового випромінювання, через приймач компенсації фонового випромінювання, підключений до третього входу блока порівняння, вихід якого підключений до першого входу блока визначення кутових координат, згадані другий та третій, а також п'ятий виходи блока визначення кутових координат підключені до входів блока аналізу, вихід якого підключений до четвертого входу пристрою індикації, згаданий вихід приводу антени підключений до перших входів антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, другі входи яких, та четвертий вхід антени, підключені до третього виходу формувача керуючих сигналів, а згаданий третій вхід антени з'єднаний з третіми входами антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, перший вхід формувача керуючих сигналів АРЛК підключений до четвертого виходу формувача керуючих сигналів, четвертий та п’ятий виходи якого, відповідно підключені до першого входу формувача керуючих сигналів АРЛК та п’ятого входу антени, другий та третій виходи формувача керуючих сигналів АРЛК відповідно підключені до першого входу підсилювача потужності та входу формувача зондуючих імпульсів, другий вхід формувача керуючих імпульсів АРЛК підключений до першого виходу формувача стробу випромінювання, другий вихід якого підключений до першого входу пристрою індикації АРЛК, перший вхід формувача стробу випромінювання та другий вхід пристрою індикації АРЛК з'єднані з названим першим виходом датчика сканування антени, другий вхід формувача стробу випромінювання з'єднаний з названим другим виходом блока визначення кутових координат, перший вихід формувача зондуючих імпульсів підключений до другого входу підсилювача потужності, перший вихід якого підключений до шостого входу-виходу антени, а другий вихід підключений до першого входу приймача АРЛК, другий вхід приймача АРЖ підключений до другого виходу формувача зондуючих ім 80494 8 пульсів, а вихід підключений до третього входу пристрою індикації АРЛК. Відомо, що процес виявлення пасивною радіолокаційною станцією ВО носить ймовірний характер. В процесі виявлення ВО та вимірюванні їх координат пасивна радіолокаційна станція функціонує в умовах апріорної невизначеності відносно напрямку приходу (пеленгу) та параметрів (частоти, тривалості, періоду повторення) сигналів випромінюючих радіолокаційних засобів. Згадані вище фактори, а також дальність знаходження ВО та умови розповсюдження радіохвиль різних діапазонів частот на загоризонтних трасах зумовлюють ймовірний характер прийому та виявлення сигналів даних ВО. Показники ймовірності найближчого аналога в умовах згаданої вище апріорної невизначеності при відсутності розподілу зон просторового пошуку, робочих діапазонів частот, неможливості використання відомих, чи передбачуваних, даних про маршрути руху носіїв ВО та параметри їх сигналів окремими пасивно-активними радіолокаційними системами, що знаходяться на позиціях, будуть низькими. Найближчий аналог не забезпечує управління та спільну обробку інформації просторово рознесених пасивно-активних радіолокаційних систем, її аналіз та розподіл робочих зон, частотних діапазонів та інше, між системами при вирішенні задач виявлення та вимірювання координат випромінюючих та інших об'єктів, що призводить до значних затрат часу. В основу винаходу поставлена задача створити мобільний радіотехнічний комплекс, який би забезпечував зменшення затрат часу на виявлення та вимірювання координат повітряних, надводних (наземних) об’єктів та підвищення ефективності використання окремих просторово рознесених пасивноактивних радіолокаційних систем. Поставлена задача вирішується тим, що в мобільний радіотехнічний комплекс який містить принаймні дві, розміщені на рухомих просторово рознесених носіях, пасивно-активні радіолокаційні системи (П-А РЛС), кожна з яких містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння, блок аналізу, формувач керуючих сигналів активного радіолокаційного каналу (АРЛК), формувач строб) випромінювання, формувач зондуючих імпульсів, підсилювач потужності, приймач АРЛК та пристрій індикації АРЛК, при цьому, перший вхід антени, через привід антени, підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого входу датчика сканування антени та другого входу блока визначення кутових координат, третій вхід якого підключений до другого виходу датчика сканування антени, четвертий вихід підключений до другого входу датчика сканування антени, перший вихід підключений до перших входів пристрою індикації і пер 9 шого блока обчислення відстані, другий вихід підключений до другого входу пристрою індикації, третій вхід пристрою індикації підключений до виходу першого блока обчислення відстані, перший вихід формувача керуючих сигналів підключений до другого входу антени, другий вихід підключений до четвертого входу блока визначення кутових координат, а третій вхід антени, та другий вхід першого блока обчислення відстані, є входами системи, вихід антени компенсації бокового випромінювання, через приймач компенсації бокового випромінювання, підключений до другого входу блока порівняння, вихід антени компенсації фонового випромінювання, через приймач компенсації фонового випромінювання, підключений до третього входу блока порівняння, вихід якого підключений до першого входу блока визначення кутових координат, згадані другий та третій, а також п'ятий виходи блока визначення кутових координат підключені до входів блока аналізу, вихід якого підключений до четвертого входу пристрою індикації, згаданий вихід приводу антени підключений до перших входів антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, другі входи яких, та четвертий вхід антени, підключені до третього виходу формувача керуючих сигналів, а згаданий третій вхід антени з'єднаний з третіми входами антени компенсації бокового випромінювання та антени компенсації фонового випромінювання, перший вхід формувача керуючих сигналів АРЛК підключений до четвертого виходу формувача керуючих сигналів, додаткові четвертий та п’ятий виходи якого, відповідно підключені до першого входу формувача керуючих сигналів АРЛК та п’ятого входу антени, другий та третій виходи формувача керуючих сигналів АРЛК відповідно підключені до першого входу підсилювача потужності та входу формувача зондуючих імпульсів, другий вхід формувача керуючих імпульсів АРЛК підключений до першого виходу формувача стробу випромінювання, другий вихід якого підключений до першого входу пристрою індикації АРЛК, перший вхід формувача строба випромінювання та другий вхід пристрою індикації АРЛК з'єднані з названим першим виходом датчика сканування антени, другий вхід формувача строба випромінювання з’єднаний з названим другим виходом блока визначення кутових координат, перший вихід формувача зондуючих імпульсів підключений до другого входу підсилювача потужності, перший вихід якого підключений до шостого входу-виходу антени а другий вихід підключений до першого входу приймача АРЛК, другий вхід приймача АРЛК підключений до другого виходу формувача зондуючих імпульсів, а вихід підключений до третього входу пристрою індикації АРЛК, згідно винаходу, до кожної П-А РЛС додатково введені блок формування даних та станція збору інформації, обробки та розподілу задач (ЗІОРЗ), що містить приймальну антену, передаючу антену, пристрій керування антенами, приймач станції ЗІОРЗ, передавач, пристрій виділення інформації, синхронізатор, пристрій формування інформації, пристрій індикації станції ЗІОРЗ, формувач керуючих сигналів станції ЗІОРЗ, пристрій 80494 10 обробки та розподілу інформації, при цьому, вихід приймальної антени підключений до входу приймача станції ЗІОРЗ, перший вихід якого підключений до першого входу пристрою виділення інформації, другий вихід підключений до першого входу пристрою індикації станції ЗІОРЗ, а третій вихід підключений до першого входу пристрою керування антенами, другий вхід та перший вихід пристрою виділення інформації підключені відповідно до першого виходу та першого входу синхронізатора, другий вхід якого підключений до першого виходу формувача керуючих сигналів станції ЗІОРЗ, другий вихід підключений до другого входу пристрою керування антенами, а третій вихід підключений до першого входу пристрою формування інформації, третій вхід пристрою керування антенами підключений до другого виходу формувача керуючих сигналів станції ЗІОРЗ, його перший вихід-вхід та другий вихід відповідно підключені до першого входу-виходу приймальної антени та першого входу передаючої антени, а його третій вихід з'єднаний з першим входом пристрою обробки та розподілу інформації та другим входом пристрою індикації станції ЗІОРЗ, другий вхід пристрою обробки та розподілу інформації підключений до третього виходу формувача керуючих сигналів станції ЗІОРЗ, третій вхід пристрою обробки та розподілу інформації та четвертий вхід пристрою керування антенами підключені до зовнішньої навігаційної системи, четвертий вхід пристрою обробки та розподілу інформації підключений до виходу дадатково введеного блока формування даних, перший, другий та третій входи якого відповідно з’єднані, з додатковим четвертим виходом формувача керуючих сигналів АРЛК, з названим першим виходом датчика сканування антени та названим виходом приймача АРЛК, п’ятий, шостий та сьомий входи пристрою обробки та розподілу інформації відповідно підключені до названого виходу першого блока обчислення відстані, названого першого виходу блока визначення кутових координат та другого виходу пристрою виділення інформації, перший вихід пристрою обробки та розподілу інформації, через другий вхід пристрою формування інформації та передавач, підключений до другого входу передаючої антени, а його другий, третій, четвертий та п’ятий виходи відповідно підключені, до третього входу пристрою індикації станції ЗІОРЗ, названого другого входу першого блока обчислення відстані, зовнішніх систем та першого входу формувача керуючих сигналів станції ЗІОРЗ, другий та третій входи-виходи та четвертий вхід формувача керуючих сигналів станції ЗІОРЗ відповідно з’єднані, з додатковим другим входом-виходом відомого формувача керуючих сигналів, додатковим третім входомвиходом відомого формувача керуючих сигналів АРЛК та зовнішніми системами, додатковий шостий вихід відомого формувача керуючих сигналів з'єднаний з додатковим третім входом датчика сканування антени а вихід передаючої антени та другий вхід приймальної антени радіозв'язком з'єднані з іншими станціями ЗІОРЗ мобільного радіотехнічного комплексу. 11 Крім того, в мобільному радіотехнічному комплексі, згідно винаходу, пристрій виділення інформації містить порогову схему, пристрій підстройки фази, формувач тактової частоти, узгоджений фільтр, формувач меандра прийому, пристрій керування та схему виділення символів при цьому, вихід порогової схеми через послідовно з'єднані узгоджений фільтр та формувач меандра прийому підключений до першого входу пристрою керування, вихід якого підключений до першого входу схеми виділення символів, згаданий вихід порогової схеми підключений також до другого входу схеми виділення символів та через пристрій підстройки фази до формувача тактової частоти, перший та другий виходи якого підключені відповідно до другого входу пристрою підстройки фази та третього входу схеми виділення символів, крім того, вхід порогової схеми є першим, другий вхід пристрою керування є другим входом пристрою виділення інформації, а третій вихід формувача тактової частоти та вихід схеми виділення символів є, відповідно, його першим та другим виходами. Крім того, в мобільному радіотехнічному комплексі, згідно винаходу, пристрій обробки та розподілу інформації містить пристрій декодування, вимірювач дальності, схему вимірювання пеленга, перший формувач даних, другий формувач даних, пристрій розподілу інформації, пристрій вимірювання розбіжностей курсових систем, пристрій кодування, буферну пам’ять, пристрій обчислення та екстраполяції та пристрій спряження при цьому перший, другий, третій, четвертий та п'ятий входи пристрою розподілу інформації, відповідно з'єднані, з виходами пристрою декодування, другого формувача даних, вимірювача дальності, першим виходом пристрою вимірювання розбіжностей курсових систем та виходом пристрою обчислення та екстраполяції, перший вхід якого, та перші входи пристрою вимірювання розбіжностей курсових систем, пристрою кодування, буферної пам’яті та пристрою спряження з'єднані, відповідно, з першим, другим, третім, четвертим та п'ятим виходами пристрою розподілу інформації, другий вхід пристрою вимірювання розбіжностей курсових систем з'єднаний з першим виходом схеми вимірювання пеленга а його другий та третій виходи відповідно з'єднані з першим входом схеми вимірювання пеленгу та першим входом першого формувача даних, другий вхід якого з'єднаний з другим виходом схеми вимірювання пеленга, крім того, другий вхід схеми вимірювання пеленга є першим входом пристрою обробки та розподілу інформації, з’єднані між собою перші входи пристрою декодування та вимірювача дальності, третій вхід схеми вимірювання пеленгу, шостий вхід пристрою розподілу інформації, другі входи пристрою кодування та буферної пам’яті є другим входом пристрою обробки та розподілу інформації, другий вхід пристрою обчислення та екстраполяції, сьомий вхід пристрою розподілу інформації, перший та другий входи другого формувача даних, а також, з'єднані між собою другий вхід пристрою декодування, другий вхід вимірювача дальності та четвертий вхід схеми вимірювання пеленгу, є, від 80494 12 повідно, третім, четвертим, п'ятим, шостим та сьомим входами пристрою обробки та розподілу інформації, а виходи пристрою кодування, буферної пам’яті, першого формувача даних, пристрою спряження та шостий вихід пристрою розподілу інформації є відповідно, першим, другим, третім, четвертим та п’ятим виходами пристрою обробки та розподілу інформації. Така побудова мобільного радіотехнічного комплексу забезпечує зменшення затрат часу на виявлення та вимірювання координат повітряних, надводних (наземних) об’єктів та підвищення ефективності використання окремих, просторово рознесених пасивно-активних радіолокаційних систем. Суть винаходу пояснюється наступним описом та кресленнями, де: на Фіг.1 наведена блок-схема мобільного радіотехнічного комплексу; на Фіг.2 наведена блок-схема пристрою виділення інформації; на Фіг.3 наведена блок-схема пристрою обробки та розподілу інформації; на Фіг.4 наведена схема, що пояснює взаємодію систем комплексу. Зменшення часу виявлення та вимірювання координат об’єктів і підвищення ефективності використання окремих просторово рознесених пасивно-активних радіолокаційних систем в мобільному радіотехнічному комплексі досягається за рахунок: - попереднього розподілу простору (району), в якому базується комплекс, на визначені сектори (зони відповідальності) пошук об'єктів в яких здійснюють окремі П-А РЛС комплексу, при цьому, кожна П-А РЛС самостійно здійснює і частотний пошук в діапазонах радіохвиль, в яких можуть працювати ВО. Дані про виявлені об’єкти від кожної П-А РЛС через станцію ЗІОРЗ передаються на ведучу (флагманську) станцію ЗІОРЗ комплексу, функції якої, по домовленості, може виконувати будь яка із станцій ЗІОРЗ комплексу; - створення на флагманській станції ЗІОРЗ мобільного комплексу загального інформаційного поля на базі даних, що надходять через станції ЗІОРЗ від кожної П-А РЛС та отриманих іншими засобами інформації, реалізації на його основі спільної обробки інформації з метою оцінки цільової та радіотехнічної обстановки в районі базування комплексу, визначення пріоритетних секторів простору та об'єктів і організації управління режимами роботи окремих П-А РЛС в кожному секторі спостереження; - використання адаптивних режимів виявлення та супроводу шляхом короткочасного наведення антен П-А РЛС на напрямки (пеленги) суміжних секторів простору, в яких суміжні системи виявили пріоритетні об'єкти. Пеленги та параметри частотного пошуку, при цьому, П-А РЛС отримують від ведучої станції ЗІОРЗ комплексу. Перенацілення антени П-А РЛС на попередньо визначений пеленг ВО здійснюється з підвищеною швидкістю і не потребує великих затрат часу. Таким чином, кожна П-А РЛС надійно забезпечує виявлення ВО в своєму секторі простору та прискорене визначен 13 ня координат пріоритетного об'єкту, виявленого сусідньою системою; - короткочасного наведення антен суміжних ПА РЛС на пеленги можливого місцезнаходження ВО, що отримані від інших джерел інформації, наприклад, з відомого розкладу руху чи відомих маршрутів руху носіїв ВО. Зменшенню часу виявлення ВО, в таких випадках, сприяє використання і апріорних даних про частоту радіохвиль та інші параметри радіосигналів очікуваного ВО. Запропонований мобільний радіотехнічний комплекс, див. Фіг.1, містить принаймні дві, розміщені на рухомих просторово рознесених носіях, ПА РЛС 1 та станції ЗІОРЗ 2 які містять антену 3, привід антени 4, датчик 5 сканування антени, приймач 6, блок 7 визначення кутових координат, пристрій 8 індикації, перший блок 9 обчислення відстані, формувач 10 керуючих сигналів, антену 11 компенсації бокового випромінювання, антену 12 компенсації фонового випромінювання, приймач 13 компенсації бокового випромінювання, приймач 14 компенсації фонового випромінювання, блок 15 порівняння, блок 16 аналізу, формувач 17 керуючих сигналів активного радіолокаційного каналу (АРЛК), формувач 18 строба, випромінювання, формувач 19 зондуючих імпульсів, підсилювач 20 потужності, приймач 21 АРЛК, пристрій 22 індикації АРЛК, блок 23 формування даних, приймальну антену 24, передаючу антену 25, пристрій 26 керування антенами, приймач 27 станції ЗІОРЗ, передавач 28, пристрій 29 виділення інформації, синхронізатор 30, пристрій 31 формування інформації, пристрій 32 індикації станції ЗІОРЗ, формувач 33 керуючих сигналів станції ЗІОРЗ, пристрій 34 обробки та розподілу інформації, при цьому, перший вхід антени 3, через привід 4 антени, підключений до першого виходу датчика 5 сканування антени, перший вихід антени 3 підключений до першого входу датчика 5 сканування антени та другого входу блока 7 визначення кутових координат, третій вхід якого підключений до другого виходу датчика 5 сканування антени, четвертий вихід підключений до другого входу датчика 5 сканування антени, перший вихід підключений до перших входів пристрою 8 індикації і першого блока 9 обчислення відстані, другий вихід підключений до другого входу пристрою 8 індикації, третій вхід пристрою 8 індикації підключений до виходу першого блока 9 обчислення відстані, перший вихід формувача 10 керуючих сигналів підключений до другого входу антени 3, другий вихід підключений до четвертого входу блока 7 визначення кутових координат, вихід антени 11 компенсації бокового випромінювання, через приймач 13 компенсації бокового випромінювання, підключений до другого входу блока 15 порівняння, вихід антени 12 компенсації фонового випромінювання, через приймач 14 компенсації фонового випромінювання, підключений до третього входу блока 15 порівняння, вихід якого підключений до першого входу блока 7 визначення кутових координат, згадані другий та третій, а також п'ятий виходи блока 7 визначення кутових координат підключені до входів блока 16 аналізу, вихід якого підключений до четвертого входу пристрою 8 індикації, згада 80494 14 ний вихід приводу 4 антени підключений також до перших входів антени 11 компенсації бокового випромінювання та антени 12 компенсації фонового випромінювання другі входи яких, та четвертий вхід антени 3, підключені до третього виходу формувача 10 керуючих сигналів, а згаданий третій вхід антени 3, з'єднаний з третіми входами антени 11 компенсації бокового випромінювання та антени 12 компенсації фонового випромінювання є входами системи, перший вхід формувача 22 керуючих сигналів АРЛК підключений до четвертого виходу формувача 10 керуючих сигналів, четвертий та п’ятий виходи якого, відповідно підключені, до першого входу формувача 17 керуючих сигналів АРЛК та п’ятого входу антени 3, другий та третій виходи формувача 17 керуючих сигналів АРЛК відповідно підключені до першого входу підсилювача 20 потужності та входу формувача 19 зондуючих імпульсів, другий вхід формувача 17 керуючих імпульсів АРЛК підключений до першого виходу формувача 18 строба випромінювання, другий вихід якого підключений до першого входу пристрою 22 індикації АРЛК, перший вхід формувача 18 строба випромінювання та другий вхід пристрою 22 індикації АРЛК з'єднані з названим першим виходом датчика 5 сканування антени, другий вхід формувача 18 строба випромінювання з'єднаний з названим другим виходом блока 7 визначення кутових координат, перший вихід формувача 19 зондуючих імпульсів підключений до другого входу підсилювача 20 потужності, перший вихід-вхід якого підключений до шостого входувиходу антени 3, а другий вихід підключений до першого входу приймача 21 АРЛК, другий вхід приймача 21 АРЛК підключений до другого виходу формувача 19 зондуючих імпульсів, а вихід підключений до третього входу пристрою 22 індикації АРЛК, вихід приймальної антени 24 підключений до входу приймача 27 станції ЗІОРЗ, перший вихід якого підключений до першого входу пристрою 29 виділення інформації, другий вихід підключений до першого входу пристрою 32 індикації станції ЗІОРЗ, а третій вихід підключений до першого входу пристрою 26 керування антенами, другий вхід та перший вихід пристрою 29 виділення інформації підключені відповідно до першого виходу та першого входу синхронізатора 30, другий вхід якого підключений до першого виходу формувача 33 керуючих сигналів станції ЗІОРЗ, другий вихід підключений до другого входу пристрою 26 керування антенами, а третій вихід підключений до першого входу пристрою 31 формування інформації, третій вхід пристрою 26 керування антенами підключений до другого виходу формувача 33 керуючих сигналів станції ЗІОРЗ, його перший вихід-вхід та другий вихід відповідно підключені до першого входу-виходу приймальної антени 24 та першого входу передаючої антени 25, а його третій вихід з’єднаний з першим входом пристрою 34 обробки та розподілу інформації та другим входом пристрою 32 індикації станції ЗІОРЗ, другий вхід пристрою 34 обробки та розподілу інформації підключений до третього виходу формувача 33 керуючих сигналів станції ЗІОРЗ, третій вхід пристрою 35 обробки та розподілу інформації та четвертий вхід 15 пристрою 26 керування антенами підключені до зовнішньої навігаційної системи, четвертий вхід пристрою 34 обробки та розподілу інформації підключений до виходу блока 23 формування даних, перший, другий та третій входи якого відповідно з’єднані, з четвертим виходом формувача 17 керуючих сигналів АРЛК, з названим першим виходом датчика 5 сканування антени та названим виходом приймача 21 АРЛК, п’ятий, шостий та сьомий входи пристрою 34 обробки та розподілу інформації відповідно підключені, до названого виходу першого блока 9 обчислення відстані, названого першого виходу блока 7 визначення кутових координат та другого виходу пристрою 29 виділення інформації, перший вихід пристрою 34 обробки та розподілу інформації, через другий вхід пристрою 31 формування інформації та передавач 28, підключений до другого входу передаючої антени 25, а його другий, третій, четвертий та п’ятий виходи відповідно підключені, до третього входу пристрою 32 індикації станції ЗІОРЗ, названого другого входу першого блока 9 обчислення відстані, зовнішніх систем та першого входу формувача 33 керуючих сигналів станції ЗІОРЗ, другий та третій входи-виходи та четвертий вхід формувача 33 керуючих сигналів станції ЗІОРЗ відповідно з’єднані, з додатковим другим входом-виходом відомого формувача 10 керуючих сигналів, додатковим третім входом-виходом відомого формувача 17 керуючих сигналів АРЛК та зовнішніми системами, додатковий шостий вихід відомого формувача 10 керуючих сигналів з’єднаний з додатковим третім входом датчика 5 сканування антени а вихід передаючої антени 25 та другий вхід приймальної антени 24 радіозв’язком з’єднані з іншими станціями ЗІОРЗ 2 мобільного радіотехнічного комплексу. Приймальна антена 24 містить антенне дзеркало та два, симетрично винесених із його оптичного фокусу рупорні опромінювачі, виходи яких через керований суматор по черзі, або одночасно (залежно від режиму роботи) підключаються до виходу приймальної антени 24. При одночасному підключенні опромінювачів на виході антени формується сумарний пелюсток діаграми спрямованості, напрямок якого співпадає з оптичною віссю приймальної антени 24, а при почерговому підключенні на виході формуються парціальні пелюстки, рівносигнальний напрямок яких співпадає з напрямком оптичної вісі приймальної антени 24. Крім того, приймальна антена 24 містить приводи керування, датчики кута та обертові пристрої які забезпечують керування антеною 24 та передачу сигналів між рухомою і нерухомою частинами її конструкції. Керування приймальною антеною 24 здійснюється від пристрою 26 управління антенами. Передаюча антена 25 має торовидну діаграму спрямованості і забезпечує випромінювання надвисокочастотних сигналів інформації, якою обмінюються станції ЗІОРЗ 2 комплексу, в напрямку горизонту, перекриваючи таким чином всі можливі положення носіїв комплексу в просторі. Передаюча антена містить також привід керування та датчик кута, які забезпечують стабільність її положення в умовах дії бокової хитавиці носія. 80494 16 Пристрій 26 керування антенами забезпечує керування та стабільне положення приймальної антени 24 в умовах дії бокової та кільової хитавиці чи зміни курсу носія та передаючої антени 25 в умовах дії бокової хитавиці носія. Поточні значення хитавиць та курсу носія поступають в пристрій 26 керування антенами від зовнішньої навігаційної системи. Пристрій 26 керування антенами забезпечує: - кругове обертання приймальної антени 24 станції ЗІОРЗ 2, яка працює в режимі ведучої станції. Така станція називається флагманською станцією (ФС); автоматичний супровід (режим АС) приймальною антеною 24 веденоїстанції (ВС) ЗІОРЗ 2 напрямку на носій ФС ЗІОРЗ 2. Супровід напрямку на флагманську станцію ЗІОРЗ 2 забезпечується за рахунок аналізу співвідношення амплітуд сигналів прийнятих парціальними пелюстками діаграми спрямованості приймальної антени 24, формування сигналу похибки і довороту антени 24 на рівносигнальний напрямок; - вимірювання поточного кутового положення (пеленгу) приймальної антени 24 та видачу його значення на пристрій 32 індикації станції ЗІОРЗ та пристрій 34 обробки та розподілу інформації. Приймальна антена 24 та пристрій 26 керування антенами є типовими пристроями радіотехнічних систем ["Радиотехнические системы" под ред. Ю.М. Казаринова, "Сов. радио", М, 1968г, глава 6]. Приймач 27 станції ЗІОРЗ забезпечує підсилення, фільтрацію, перетворення НВЧ сигналів на проміжну частоту з подальшою демодуляцією та розподілом на три канали: - пеленгаційний, який підключений до пристрою 26 керування антенами та забезпечує його роботу в режимі АС; - канал індикації, для відображення амплітуди прийнятих сигналів пристроєм 32 індикації станції ЗІОРЗ; - інформаційний, для прийому та виділення інформації. Приймач 27 станції ЗІОРЗ та передавач 28 є типовими пристроями радіотехнічних систем. Пристрій 29 виділення інформації, див. Фіг.2, містить порогову схему 35, пристрій 36 підстройки фази, формувач 37 тактової частоти узгоджений фільтр 38, формувач 39 меандра прийому, пристрій 40 керування та схему 41 виділення символів, при цьому, вихід порогової схеми 35, через послідовно з’єднані узгоджений фільтр 38 та формувач 39 меандра прийому, підключений до першого входу пристрою 40 керування, вихід якого підключений до першого входу схеми 41 виділення символів, згаданий вихід порогової схеми 35 підключений також до другого входу схеми 41 виділення символів та через пристрій 36 підстройки фази до формувача 37 тактової частоти, перший та другий виходи якого підключені, відповідно, до другого входу пристрою 36 підстройки фази та третього входу схеми 41 виділення символів, крім того, вхід порогової схеми 35 є першим, другий вхід пристрою 40 керування є другим входом пристрою 29 виділення інформації, а третій вихід формувача 37 тактової частоти та вихід схеми 41 17 виділення символів є, відповідно, першим та другим виходами пристрою 29 виділення інформації. Виділений приймачем 27 станції ЗІОРЗ інформаційний сигнал проходить через порогову схему 35, яка відокремлює від нього шум (нижній поріг) та формує полицю імпульсу (верхній поріг). Виділений сигнал містить три різні за призначенням послідовності імпульсів. Перша послідовність, так звана синхросерія, поступає на пристрій 36 підстройки фази, де зрівнюється по фазі з імпульсами формувача 37 тактової частоти і за час свого існування забезпечує синхронізацію формувача 37 тактової частоти. Друга послідовність імпульсів, так звана маркерна група, пройшовши через узгоджений фільтр 38 та формувач 39 меандра прийому поступає на пристрій 40 керування, котрий формує та видає на схему 41 виділення символів дозвіл на проходження третьої послідовності імпульсів - власне інформаційної частини прийнятого сигналу. Синхронізація формувача 37 тактової частоти та формування пристроєм 40 керування дозволу на проходження інформації здійснюється в режимі реального виміру часу і закінчується до приходу інформаційної частини сигналу, котра поступає на схему 41 виділення символів, на інші входи якої поступають сигнали потроєної тактової частоти з формувача 37 тактової частоти та дозвіл з пристрою 40 керування. Аналізуючи співвідношення амплітуд сигналів тактової частоти та амплітуд імпульсів інформаційної частини сигналу протягом перших вісімнадцяти періодів тактової частоти, по критерію 2 із 3 схема 41 виділення символів дозволяє прохід інформації через пристрій 29 виділення інформації на пристрій 32 обробки та розподілу інформації. Якщо прийнятий сигнал на трасі розповсюдження, чи в елементах тракту станції ЗІОРЗ 2, зазнає недопустимих ушкоджень, то: - його синхросерія не забезпечить синхронізацію формувача 37 тактової частоти; - його маркерна група не пройде через узгоджений фільтр 38 та не сформує сигнал дозволу. При невиконанні хоча б однієї умови схема 41 виділення символів не пропустить інформаційну частину сигналу на її подальшу обробку. Така побудова пристрою 37 виділення інформації забезпечує високу достовірність, завадостійкість та інформативність зв'язку між станціями ЗІОРЗ 2 мобільного комплексу. Пристрій 34 обробки та розподілу інформації, див. Фіг.3, містить пристрій 42 декодування, вимірювач 43 дальності, схему 44 вимірювання пеленга, перший формувач 45 даних, другий формувач 46 даних, пристрій 47 розподілу інформації, пристрій 48 вимірювання розбіжностей курсових систем, пристрій 49 кодування, буферну пам'ять 50, пристрій 51 обчислення та екстраполяції та пристрій 52 спряження, при цьому, перший, другий, третій, четвертий та п'ятий входи пристрою 47 розподілу інформації, відповідно, з'єднані з виходами, пристрою 42 декодування, другого формувача 46 даних, вимірювача 43 дальності, першим виходом пристрою 48 вимірювання розбіжностей курсових систем та виходом пристрою 51 обчис 80494 18 лення та екстраполяції, перший вхід якого, та перші входи пристрою 48 вимірювання розбіжностей курсових систем, пристрою 49 кодування, буферної пам’яті 50 та пристрою 52 спряження з'єднані, відповідно, з першим, другим, третім, четвертим та п'ятим виходами пристрою 47 розподілу інформації, другий вхід пристрою 48 вимірювання розбіжностей курсових систем з'єднаний з першим виходом схеми 44 вимірювання пеленгу, а його другий та третій виходи відповідно з'єднані з першим входом схеми 44 вимірювання пеленгу та першим входом першого формувача 45 даних, другий вхід якого з'єднаний з другим виходом схеми 44 вимірювання пеленга, крім того, другий вхід схеми 44 вимірювання пеленга, є першим входом пристрою 34 обробки та розподілу інформації, з’єднані між собою перші входи пристрою 42 декодування та вимірювача 43 дальності, третій вхід схеми 44 вимірювання пеленгу, шостий вхід пристрою 47 розподілу інформації, другі входи пристрою 49 кодування та буферної пам’яті 50 є другим входом пристрою 34 обробки та розподілу інформації, другий вхід пристрою 51 обчислення та екстраполяції, сьомий вхід пристрою 47 розподілу інформації, перший та другий входи другого формувача 46 даних, а також, з'єднані між собою другий вхід пристрою 42 декодування, другий вхід вимірювача 43 дальності та четвертий вхід схеми 44 вимірювання пеленга є, відповідно, третім, четвертим, п'ятим, шостим та сьомим входами пристрою 34 обробки та розподілу інформації, а виходи пристрою 49 кодування, буферної пам’яті 50, першого формувача 45 даних, пристрою 52 спряження та шостий вихід пристрою 47 розподілу інформації є, відповідно, першим, другим, третім, четвертим та п’ятим виходами пристрою 34 обробки та розподілу інформації. Режим роботи та перелік задач, які вирішує пристрій 34 обробки та розподілу інформації, обумовлюється режимом роботи (ФС чи ВС) даної станції ЗІОРЗ 2. При роботі в режимі ФС, по команді, яка прийшла на другий вхід пристрою 34 обробки та розподілу інформації, вимірювач 43 дальності формує так званий пілот-сигнал визначення дальності, який поступає в пристрій 47 розподілу інформації, де до нього домішується інформація що передається на ВС ЗІОРЗ 2 і через пристрій 49 кодування поступає на перший вихід пристрою 34 обробки та розподілу інформації. Одночасно з формуванням пілот-сигнала в вимірювачі 43 дальності стартує датчик часу. Сформований пілот-сигнал проходить через пристрої ФС ЗІОРЗ 2, випромінюється її передаючою антеною 25 та приймається приймальною антеною 24 ВС ЗІОРЗ 2, якій він назначений. Пройшовши через приймальну антену 24, приймач 27 станції ЗІОРЗ, пристрій 29 виділення інформації веденої станції ЗІОРЗ 2, пілот-сигнал поступає на її пристрій 34 обробки та розподілу інформації, в якому, пройшовши без затримки вимірювач 43 дальності, поступає в пристрій 47 розподілу інформації і разом з іншою інформацією через пристрій 49 кодування і далі, через пристрої веденої станції ЗІОРЗ 2 випромінюється та приймається прийма 19 льною антеною 24 ФС ЗІОРЗ 2. Пройшовши через приймальний тракт ФС ЗІОРЗ 2 пілот-сигнал поступає в її пристрій 34 обробки та розподілу інформації і зупиняє датчик часу вимірювача 43 дальності. Якщо від показань датчика часу відняти відомий час, який затрачується на обробку інформації і проходження пілот-сигнала по трактам і пристроям ведучої та веденої станцій ЗІОРЗ 2, то в остатку залишається час подвійного проходження радіохвилі між рознесеними в просторі ФС та ВС ЗІОРЗ 2, з якого і знаходиться дальність (ДВС-і) даної ВС ЗІОРЗ 2 [див. Н.И. Филькенштейн «Основы радиолокации». М, «Сов. радио», 1973г.]. За час проходу приймальною антеною 24 ФС ЗІОРЗ 2 напрямку на дану ВС ЗІОРЗ 2, станції декілька раз обмінюються інформацією і при кож ному прийомі схема 44 вимірювання пеленга запам'ятовує поточне значення пеленга приймальної антени 24. Остаточне значення пеленга даної ВС ЗІОРЗ 2 знаходиться схемою 44 вимірювання пеленга як середнє значення пеленгів першого і останнього прийому інформації і видається в перший формувач 45 даних та пристрій 48 вимірювання розбіжностей курсових систем. Інформація, якою обмінюються ФС та ВС ЗІОРЗ 2, окрім названого пілот-сигнала, містить адресну частину, яка обумовлює від якої ВС вона прийшла чи якій ВС вона назначена, а також формуляр даних. Формуляр даних, що прийшов від ВС, містить пеленг на флагманський носій (ПФС-і,), пеленги виявлених випромінюючих та інших об'єктів та їх радіотехнічні параметри, проходить через пристрій 42 декодування, в якому відбувається його згорнуте та циклічне декодування і поступає в пристрій 47 розподілу інформації. Побудова та робота аналогів пристрою 42 декодування та пристрою 49 кодування розглянута в [Дж. Кларк Мл., Дж. Кейн. «Кодирование с исправлением ошибок в системах цифровой связи», М., «Радио и связь», 1987г.]. Робота пристрою 48 вимірювання розбіжностей курсових систем пояснюється малюнком, див, Фіг.4, на якому пеленг ПФС-2 - пеленг носія ФС ЗІОРЗ 2, а ПВС-2 - пеленг ВС ЗІОРЗ 2. Оскільки курсові системи носіїв мають різні поточні значення похибок, то різниця між ПФС-2 та ПВС-2 завжди буде відрізнятись на деяку величину DП, відмінну від 180°. Багаторазове вимірювання пеленгів (n»50), та знаходження середнього значення DП за n вимірювань, дозволяє значно зменшити похибки вимірювання координат ВС ЗІОРЗ 2 відносно ФС ЗІОРЗ 2. Перший формувач 45 даних формує та видає в перший блок 9 обчислення відстані П-А РЛС 1 формуляр даних, який містить визначені пеленг ПВС-і дальність ДВС-і, величину DП, а також пеленги та радіотехнічні параметри випромінюючих чи інших об'єктів, що прийняті від ВС ЗІОРЗ 2. Пристрій 51 обчислення та екстраполяції оперуючи визначеними вимірювачем 43 дальності і схемою 44 вимірювання пеленгу величинами ПВС-2, ДВС-2 та прийнятим від ВС ЗІОРЗ 2 пеленгом ВО ПВО-2, рішенням тріангуляційної задачі на площині знаходить наближене значення пеленга, виявленого ВО з точки розміщення ФС ЗІОРЗ 2, який 80494 20 сприймається як пеленг бісектриси (ПБво-2фс) сектора пошуку виявленого ВО антеною 3 П-А РЛС 1 флагманського носія. Приклади рішення тріангуляційних задач наведено в ["Теоретические основы радиолокации" под ред. Я.Д. Ширмана, М., "Сов. радио", 1970г., Гл.8]. При рішенні задачі використовується умовне, середньостатистичне значення дальності ДВО-3. Величина сектора пошуку (АС) вибирається за умови перекриття можливих значень дійсної дальності виявленого ВО. Вираховане значення ПБВО-2ФС та DС через пристрій 47 розподілу інформації, формувач 33 керуючих сигналів станції ЗІОРЗ поступає в формувач 10 керуючих сигналів П-А РЛС 1. Другий формувач 46 даних приймає від П-А РЛС 1 свого носія формуляр даних що містить пеленг виявленого ВО, його радіотехнічні параметри та дальність ВО після її визначення. Буферна пам'ять 50 та пристрій 52 спряження забезпечують накопичення та вивід інформації на пристрій 32 індикації станції ЗІОРЗ та зовнішнім споживачам. Всі пристрої мобільного радіотехнічного комплексу побудовані на сучасних радіоелементах, що виготовляються світовими виробниками такими як, AWANTEK, HEWLETT PACKARD, M/A COM, ANALOG DEVICES. Особливість побудови і роботи мобільного радіотехнічного комплексу обумовлюється наявністю в його складі станцій ЗІОРЗ 2 кожна з яких, по домовленості, може виконувати функції або ведучої, або веденої. Як правило, функції ведучої виконує станція ЗІОРЗ 2 яка розміщена на головному носії групи. Такий носій називається флагманським носієм (ФН), а станція називається флагманською станцією (ФС), інші станції ЗІОРЗ 2 називаються веденими (ВС). При розгортанні комплексу в просторі, наприклад, на 4-х рухомих надводних носіях, ФС ЗІОРЗ 2, приміром, це станція 3, див. Фіг.4, розподіляє можливу зону появи випромінюючих чи інших об’єктів на 4 сектори, пошук об’єктів в кожному з яких виконує одна П-А РЛС 1 комплексу. Всі ВС ЗІОРЗ 2 безперервно підтримують зв’язок з ФС ЗІОРЗ 2, при цьому: - приймальні антени 24 ВС ЗІОРЗ 2 працюють в режимі автоматичного супроводу напрямку на ФС ЗІОРЗ 2 (її передаючу антену 25), забезпечуючи таким чином безперервний зв’язок з ФС в умовах погодженого переміщення носіїв в просторі, дії бокової та кільової хитавиці. ВС ЗІОРЗ 2 вимірюють пеленг на ФС ЗІОРЗ 2 (Пфс-і), як пеленг рівносигнального напрямку їх приймальних антен 24 і передають його на ФС; - приймальна антена 24 ФС ЗІОРЗ 2 працює в режимі кругового обертання і проходячи напрямки на ВС ЗІОРЗ 2 по черзі приймає від них інформацію. За один прохід приймальною антеною 24 напрямку на кожну ВС флагманська станція ЗІОРЗ 2 встигає декілька разів прийняти інформацію від даної ВС і при кожному прийомі запам’ятовує поточне значення пеленга на дану ВС. Остаточне значення пеленга даної ВС (Пвс-і) знаходиться як середнє значення пеленгів першого і останнього прийому інформації від даної (і-тої) ВС ЗІОРЗ 2; 21 - ФС ЗІОРЗ 2 безперервно вимірює дальність (Двс-і) до носіїв ведених станцій ЗІОРЗ 2. Вимірювання дальності здійснюється за рахунок випромінювання ФС ЗІОРЗ 2 так званого пілот-сигнала, прийому і зворотнього перевипромінювання його ВС ЗІОРЗ 2 та виміру на ФС проміжку часу між його випромінюванням і зворотнім прийомом. Як тільки яка-небудь із П-А РЛС 1 комплексу, наприклад носія 2, див. Фіг.4, виявить в своєму секторі пошуку ВО, її блок 7 визначення кутових координат видасть в пристрій 34 обробки та розподілу інформації станції ЗІОРЗ 2 формуляр даних про виявлений ВО, який містить, пеленг ВО (Пво2), час прийому, несучу частоту та інші радіотехнічні параметри сигналів виявленого ВО. Пристрій 34 обробки та розподілу задач доповнює формуляр даних виявленого ВО пеленгом на ФС (Пфс2), та через пристрій 31 формування інформації, передавач 28, передаючу антену 25 радіозв'язком передає її на ФС ЗІОРЗ 2. Прийнята на ФС ЗІОРЗ 2 інформація поступає в її пристрій 34 обробки та розподілу задач який, використовуючи відомий пеленг ВО (Пво-2), відомі пеленг та дальність до носія системи що виявила ВО (Пфс-2 та Двс-2), рішенням тріангуляційної задачі на площині знаходить наближене значення пеленга бісектриси сектора пошуку виявленого ВО (ПБво-2фс) для антени З П-А РЛС 1 флагманського носія. Оскільки дальність ВО ще невідома, то в рішенні задачі використовується її умовне, середньостатистичне значення (Ду). Знайдене значення бісектриси сектора пошуку ПБво-2фс, величина сектора пошуку (ДС) та діапазон частот в якому працює виявлений ВО через формувач 33 керуючих сигналів станції ЗІОРЗ поступає в формувач 10 керуючих сигналів і змінює параметри просторового і частотного пошуку антени З П-А РЛС 1. Короткочасно, з підвищеною швидкістю, антена 3 П-А РЛС 1 флагманського носія перенаводиться на пошук ВО в суміжному секторі (секторі носія 2). Пеленг бісектриси пошуку Пбво-2фс і величина сектора DС пошуку ВО антеною 3 перекривають можливі значення його дійсної, доки що невідомої, дальності. Одночасно пристрій 34 обробки та розподілу інформації видає в перший блок 9 обчислення відстані формуляр даних виявленого ВО, що був прийнятий від носія 2, а також пеленги Пфс-2, Пвс2, дальність Двс-2, величину DП та радіотехнічні параметри виявленого ВО. Таким чином, пошук одного і того ж ВО в визначеному напрямку, короткочасно здійснюють дві рознесені в просторі П-А РЛС 1 комплексу. Як тільки даний ВО буде виявлений і П-А РЛС 1 флагманського носія, її перший блок 9 обчислення відстані, використовуючи відомі Пво-2, Пфс-2, Пвс2, DП, Двс-2 і Пво-3 рішенням тріангуляційної задачі на площині знаходить дальність (Дво-3) до виявленого ВО. Оскільки курсові навігаційні системи носіїв мають розбіжності, то виміряні станціями ЗІОРЗ 2 ФС і ВС значення їх взаємних пеленгів Пвс-2 і Пфс-2 будуть відрізнятися між собою на величину DП відмінну від 180° (див. Фіг.4). Ця величина визначається в пристрої 34 обробки та розподілу задач і враховується при вимірюванні дальності 80494 22 ВО, що забезпечує підвищення точності вимірювання дальності. Після декількох вимірювань дальності Дво-3 антена 3 П-А РЛС 1 флагманського носія повертається в свій сектор пошуку. В подальшому, для уточнення дальності та параметрів руху ВО (курс, швидкість) антена 3 короткочасно може знову перенаводитись на виявлений ВО. Оскільки дальність і параметри руху ВО уже визначені, то величина сектора допошуку DС в подальшому може бути зменшена, що зменшує і витрати часу. Формуляр даних ВО, що містить Дво-3, Пво-3, параметри руху та радіотехнічні параметри, з першого блока 9 обчислення відстані П-А РЛС 1 поступає в пристрій 34 обробки та розподілу інформації станції ЗІОРЗ 2, який: - радіозв’язком передає формуляр станціям ЗІОРЗ 2 інших носіїв комплексу для забезпечення подальшого супроводу ВО; - видає зовнішнім споживачам. Видачу формулярів даних виявлених ВО зовнішнім споживачам можуть здійснювати як ФС так і ВС станції ЗІОРЗ 2 комплексу. Аналогічно комплекс працює якщо ВО буде виявлений будь якою іншою П-А РЛС 1 комплексу. Періодично, для виявлення об’єктів, що знаходяться в режимі радіомовчання, ФС ЗІОРЗ 2 видає в П-А РЛС 1 комплексу команду, по якій короткочасно включаються їх активні радіолокаційні канали. Формуляри даних об’єктів виявлених активними радіолокаційними каналами з блока 23 формування даних також надходять в пристрій 34 обробки та розподілу задач станції ЗІОРЗ 2 і радіозв’язком передаються на ФС ЗІОРЗ 2, яка перераховує їх в свою систему координат, розподіляє між носіями чи видає зовнішнім споживачам. За допомогою формувача 33 керуючих сигналів станції ЗІОРЗ 2 здійснюється наведення антен З П-А РЛС 1 комплексу на пеленги можливого або очікуваного знаходження ВО, а також враховуються дані про можливі радіотехнічні параметри ВО. Такі дані надходять від зовнішніх систем і за допомогою формувача 33 керуючих сигналів станції ЗІОРЗ передаються в П-А РЛС 1 свого носія, а через пристрій 34 обробки та розподілу інформації радіозв'язком передаються в П-А РЛС 1 інших носіїв комплексу. Мобільний радіотехнічний комплекс, що заявляється, має технічну перевагу над найближчим аналогом, а саме, забезпечує зменшення часу виявлення та вимірювання координат об’єктів і підвищення ефективності використання окремих просторово рознесених пасивно-активних радіолокаційних систем. Названа технічна перевага досягається за рахунок: - попереднього розподілу простору, в якому базується комплекс, на визначені сектори, пошук об’єктів в яких здійснюють окремі П-А РЛС 1 комплексу, при цьому кожна П-А РЛС 1 самостійно здійснює і частотний пошук в діапазонах радіохвиль, в яких можуть працювати ВО. Дані про виявлені об’єкти від кожної П-А РЛС 1 через станцію ЗІОРЗ 2 передаються на ведучу станцію ЗІОРЗ 2 комплексу; 23 - створення на флагманській станції ЗІОРЗ 2 мобільного комплексу загального інформаційного поля на базі даних, що надходять через ведені станції ЗІОРЗ 2 від кожної П-А РЛС 1 та отриманих іншими засобами інформації, реалізації на його основі спільної обробки інформації з метою оцінки цільової та радіотехнічної обстановки в районі базування комплексу, визначення пріоритетних секторів простору та об'єктів і організації керування режимами роботи окремих П-А РЛС 1 в кожному секторі спостереження; - використання адаптивних режимів виявлення та супроводу шляхом короткочасного наведення антен П-А РЛС 1 на напрямки суміжних секторів простору, в яких суміжні системи виявили пріоритетні об’єкти. Пеленги та параметри частотного пошуку, при цьому, П-А РЛС 1 отримують від ведучої станції ЗІОРЗ 2 комплексу. Перенацілення антени 3 П-А РЛС 1 на попередньо визначений пеленг ВО здійснюється з підвищеною швидкістю і не потребує великих затрат часу. Таким чином, 80494 24 кожна П-А РЛС 1 надійно забезпечує виявлення ВО в своєму секторі простору та прискорене визначення координат пріоритетного об’єкта, виявленого сусідньою системою; - короткочасного наведення антен суміжних ПА РЛС 1 на пеленги можливого місцезнаходження ВО, що отримані від інших джерел інформації, наприклад, з відомого розкладу руху чи відомих маршрутів руху носіїв ВО. Зменшенню часу виявлення ВО, в таких випадках, сприяє використання і апріорних даних про частоту радіохвиль та інші параметри радіосигналів очікуваного ВО. У НДІ "Квант - Радіолокація" розроблена технічна та конструкторська документація, по якій виготовлена апаратура та проведено повний цикл випробувань запропонованого мобільного радіотехнічного комплексу, що базувався на двох рухомих носіях. Виконані в реальних умовах випробування комплексу підтвердили його технічну перевагу над найближчим аналогом. 25 80494 26 27 Комп’ютерна верстка М. Ломалова 80494 Підписне 28 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMobile radio-radar system
Автори англійськоюAndrusenko Mykola Ivanovych, Bilanovskyi Mykhailo Mykolaiovych, Bilokoz Sеrhіі Sеrhііоvусh, Віlусhеnко Ivan Fеdоrоvусh, Butyrin Anatolii Viktorovych, Huz Volodymyr Ivanovych, Yena Hryhorii Оlекsаndrоvусh, Lipatov Valerii Pavlovych, Nікіtеnко Yurii Hordiiovych, Tkachenko Vasyl Petrovych, Pironer Yan Mykhailovych, Tolstykhin Mykola Viktorovych, Кhоmеnко Mykola Vasyliovych, Chernysh Stanislav Kostiantynovych, Shovhun Vitalii Andriiovych
Назва патенту російськоюПодвижная радиотехническая система
Автори російськоюАндрусенко Николай Иванович, Билановский Михаил Николаевич, Билокоз Сергей Сергеевич, Биличенко Иван Федорович, Бутырин Анатолий Викторович, Гузь Владимир Иванович, Ена Григорий Александрович, Липатов Валерий Павлович, Никитенко Юрий Гордеевич, Ткаченко Василий Петрович, Пиронер Ян Михайлович, Толстихин Николай Викторович, Хоменко Николай Васильевич, Черныш Станислав Константинович, Шовгун Виталий Андреевич
МПК / Мітки
МПК: G01S 13/86
Мітки: мобільній, радіотехнічний, комплекс
Код посилання
<a href="https://ua.patents.su/14-80494-mobilnijj-radiotekhnichnijj-kompleks.html" target="_blank" rel="follow" title="База патентів України">Мобільний радіотехнічний комплекс</a>
Мобільний радіотехнічний комплекс
Номер патенту: 20170
Опубліковано: 15.01.2007
Автори: Ліпатов Валерій Павлович, Шовгун Віталій Андрійович, Білановський Михайло Миколайович, Гузь Володимир Іванович, Єна Григорій Олександрович, Андрусенко Микола Іванович, Ткаченко Василь Петрович
МПК: G01S 13/86
Мітки: мобільній, радіотехнічний, комплекс
Формула / Реферат:
1. Мобільний радіотехнічний комплекс, розміщений принаймні на двох рухомих просторово рознесених носіях, кожен з яких містить з’єднані між собою пасивно-активну РЛС (П-А РЛС) та станцію збору інформації обробки та розподілу завдань (ЗІОРЗ), яка містить приймальну антену, передавальну антену, пристрій керування антенами, приймач станції ЗІОРЗ, передавач, пристрій виділення інформації, синхронізатор, пристрій формування інформації, пристрій...
Мобільний радіотехнічний комплекс

Номер патенту: 14857
Опубліковано: 15.05.2006
Автори: Бутирін Анатолій Вікторович, Ліпатов Валерій Павлович, Нікітенко Юрій Гордійович, Білановський Михайло Миколайович, Толстіхін Микола Вікторович, Білокоз Сергій Сергійович, Єна Григорій Олександрович, Черниш Станіслав Костянтинович, Гузь Володимир Іванович, Шовгун Віталій Андрійович, Ткаченко Василь Петрович, Біличенко Іван Федорович, Хоменко Микола Васильович, Андрусенко Микола Іванович, Піронер Ян Михайлович
МПК: G01S 13/86
Мітки: комплекс, мобільній, радіотехнічний
Формула / Реферат:
1. Мобільний радіотехнічний комплекс, що містить принаймні дві, розміщені на рухомих просторово рознесених носіях, пасивно-активні радіолокаційні системи (П-А РЛС), кожна з яких містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового...
Спосіб модуляції при вимірюванні взаємних характеристик сигналів і радіотехнічний модуляційний пристрій для здійснення способу
Номер патенту: 49908
Опубліковано: 15.10.2002
Автор: Огороднійчук Леонід Дмитрович
МПК: G01R 27/28, G01R 25/00
Мітки: модуляції, модуляційний, здійснення, пристрій, спосіб, способу, сигналів, характеристик, радіотехнічний, вимірюванні, взаємних
Формула / Реферат:
1. Спосіб модуляції при вимірюванні взаємних характеристик сигналів, у відповідності з яким один з сигналів послідовно два рази модулюють, відповідно, першою і другою модулюючими напругами неоднакових і некратних частот, перетворюють частоти модульованого сигналу, виділяють напругу проміжної частоти (ПЧ), формують допоміжну напругу ПЧ і їх використовують для вимірювання взаємних характеристик сигналів, який відрізняється тим, що другий сигнал...
Мобільний комплекс для ізоляції радіоактивних відходів від навколишнього середовища
Номер патенту: 4260
Опубліковано: 17.01.2005
Автори: Нікітін Володимир Юхимович, Вовненко Генадій Миколайович, Невідомський Володимир Олександрович
МПК: G21F 9/34
Мітки: середовища, відходів, радіоактивних, мобільній, комплекс, ізоляції, навколишнього
Формула / Реферат:
1. Мобільний комплекс для ізоляції радіоактивних відходів від навколишнього середовища, що містить механізм завантаження, виконаний у вигляді привідного візка з вантажопідйомним засобом, і бокси затарювання, який відрізняється тим, що він оснащений двома суміжними порталами, кожний із яких установлений з можливістю повздовжнього переміщення по напрямних, а бокси затарювання радіоактивних відходів виконані у вигляді залізобетонних посудин, які...
Пристрій для моделювання імовірносного графа
Номер патенту: 34114
Опубліковано: 15.02.2001
Автор: Зеленков Олександр Аврамович
Мітки: моделювання, графа, пристрій, імовірносного
Текст:
...до виходу лічильника. На фіг. 1 показано блок-схему пристрою, а на фіг. 2 - приклад імовірнісного графа. Вихід першого регістра 1 з'єднаний з адресними входами відповідно першого 2, другого 3, третього 4 ПЗП і з входом формувача 5. Вихід першого ПЗП 2 з'єднаний з першим входом першої схеми порівняння 6, другий вхід якої підключено до виходу першого генератора випадкових сигналів 7, вхід якого підключений до виходу формувача 5. Перший і...
Попередній патент: Індукційний апарат з вихровим магнітним полем
Наступний патент: Спосіб хімічної обробки насаджень суниці та пристрій для його здійснення
Випадковий патент: Спосіб виготовлення кілець упорних підшипників