Електрогідравлічний грейфер для колод
Номер патенту: 88271
Опубліковано: 11.03.2014
Автори: Ловейкін Вячеслав Сергійович, Лимар Петро Володимирович
Формула / Реферат
Електрогідравлічний грейфер для колод, що містить траверсу, електродвигун, гідравлічний насос, розподільник, дві щелепи, який відрізняється тим, що додатково містить мікроконтролер, частотний перетворювач, горизонтальний гідроциліндр та синхронізуючу тягу.
Текст
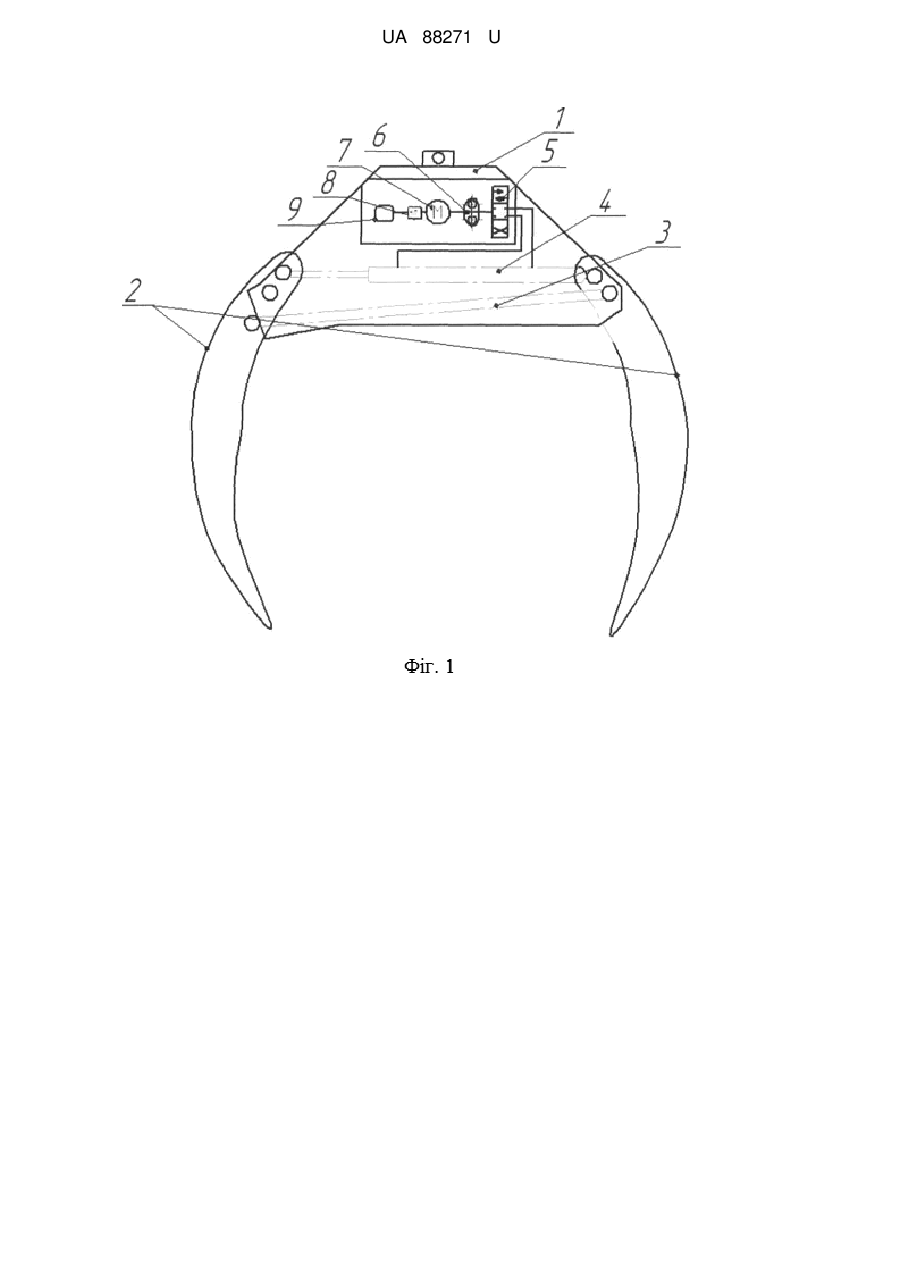
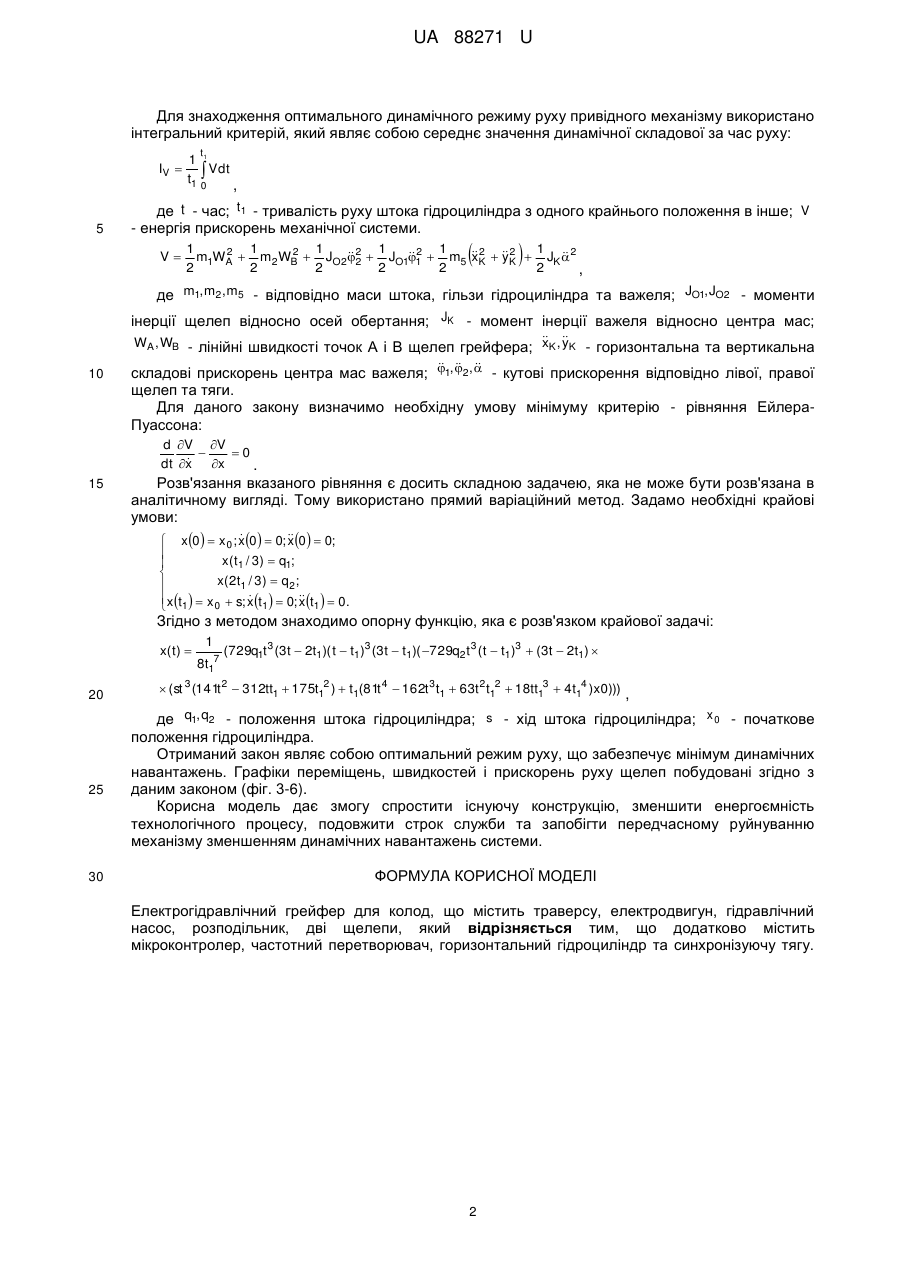
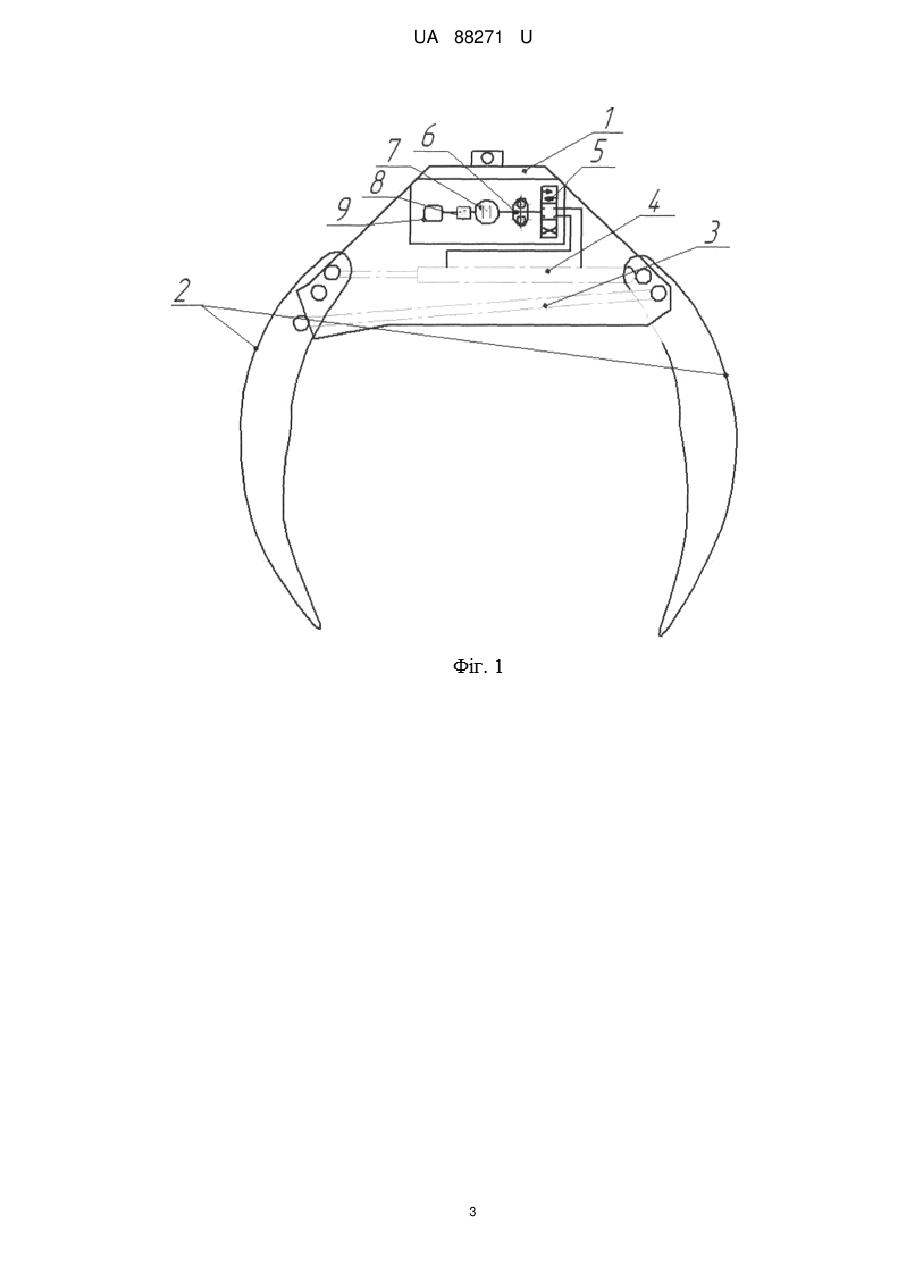
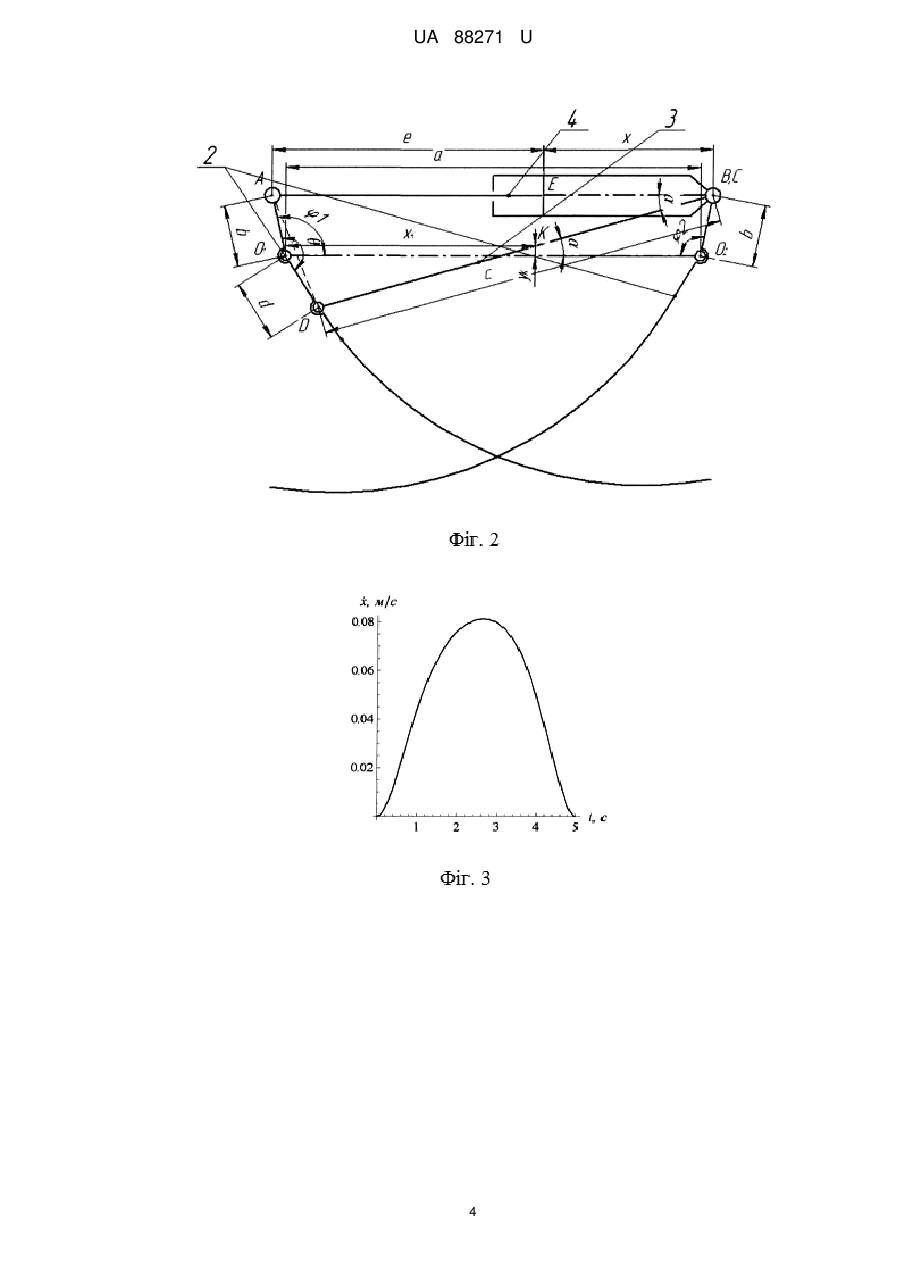
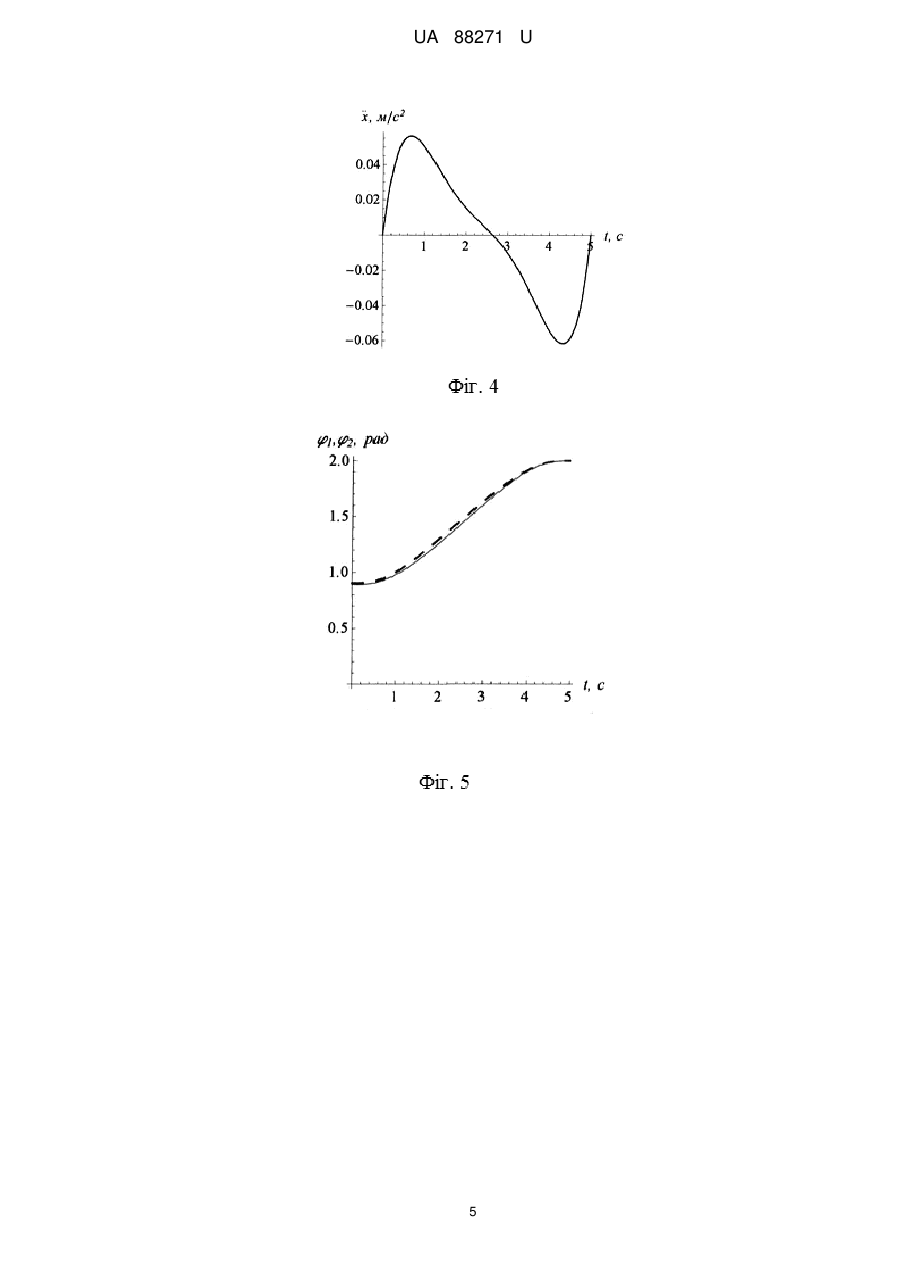
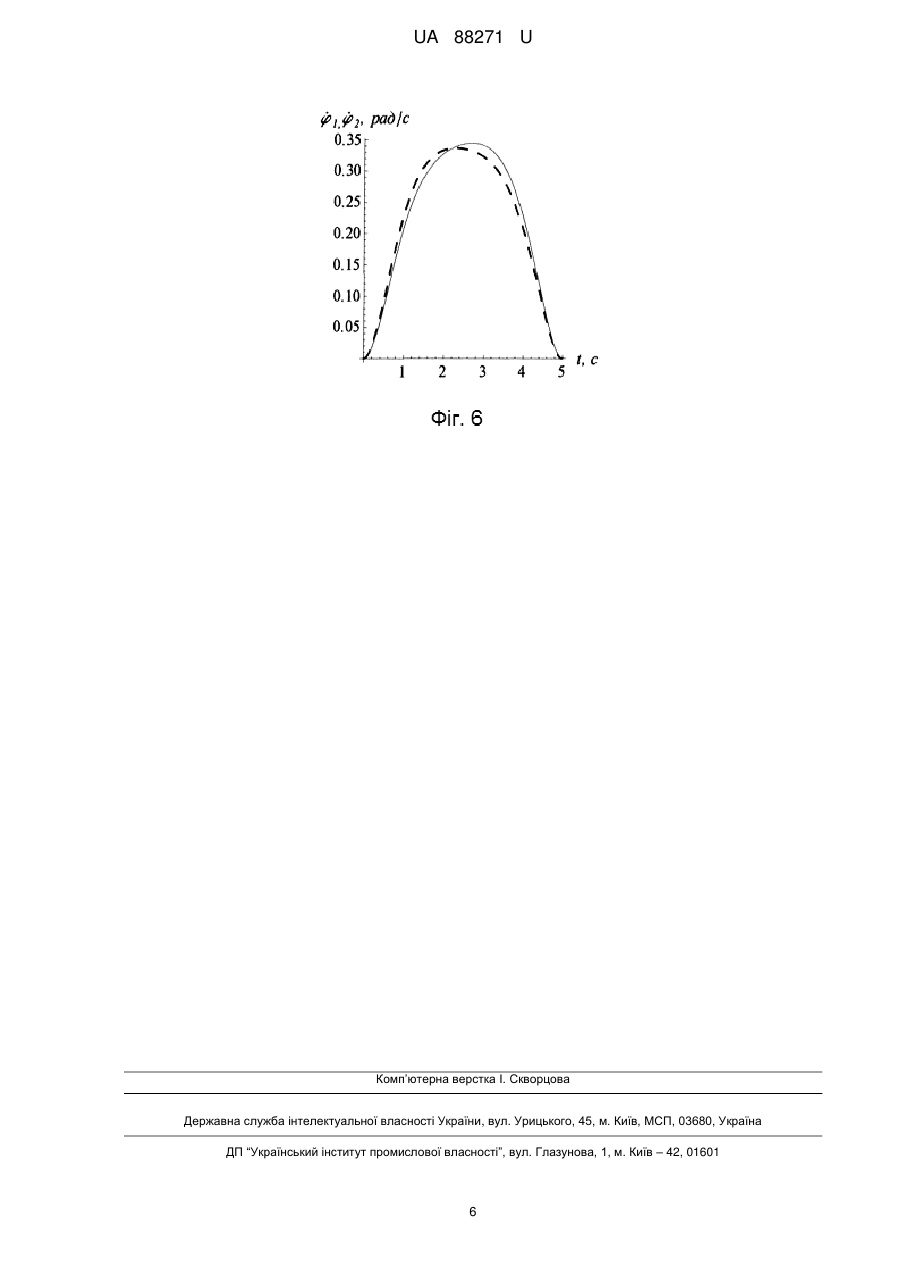
Реферат: Електрогідравлічний грейфер для колод містить траверсу, електродвигун, гідравлічний насос, розподільник, дві щелепи, мікроконтролер, частотний перетворювач, горизонтальний гідроциліндр та синхронізуючу тягу. UA 88271 U (54) ЕЛЕКТРОГІДРАВЛІЧНИЙ ГРЕЙФЕР ДЛЯ КОЛОД UA 88271 U UA 88271 U 5 10 15 20 Корисна модель належить до вантажозахватних пристроїв підйомно-транспортних машин, зокрема до грейферів з гідравлічним або пневматичним двигуном. За аналог взятий відомий електрогідравлічний грейфер для завантаження-розвантаження круглих лісоматеріалів (ЛТ-153А, http://vikron.ru/greifery-lt153a.html), який містить траверсу, електродвигун, гідравлічний насос, розподільник, два похилі гідроциліндри і щелепи. Недоліком такого приводу є те, що застосування двох гідроциліндрів приводу щелеп ускладнюють конструкцію грейферного механізму, зокрема конструкцію гідравлічної системи, електродвигун працює на природній механічній характеристиці, що зумовлює великі динамічні навантаження на механізм при перехідних режимах руху. В основу корисної моделі поставлена задача спрощення конструкції грейферного механізму, зменшення динамічних навантажень в процесі роботи грейфера шляхом зміни конструкції та керування електродвигуном згідно з заданим оптимальним динамічним законом. Поставлена задача вирішується тим, що в електрогідравлічному грейфері для колод, який містить траверсу, електродвигун, гідравлічний насос, розподільник, дві шелепи, згідно з корисною моделлю, додатково монтується мікроконтролер, частотний перетворювач, горизонтальний гідроциліндр та синхронізуюча тяга. Корисна модель пояснюється кресленнями, на яких зображено: фіг. 1 – загальний вигляд електрогідравлічного грейфера для навантаження колод; фіг. 2 – кінематична схема роботи електрогідравлічного грейфера для навантаження колод; фіг. 3 – графік швидкості штока гідроциліндра; фіг. 4 - графік прискорення штока гідроциліндра; фіг. 5 – графіки зміни кутових координат кутів: 1( t ) ---; 2 ( t ) —; 25 30 35 фіг. 6 – графіки кутових швидкостей: 1( t ) ---; 2 ( t ) —. Електрогідравлічний грейфер для навантаження колод складається з траверси 1, мікроконтролера 9, частотного перетворювача 8, електродвигуна 7, гідравлічного насоса 6, розподільника 5, гідроциліндра 4, синхронізуючої тяги 3 та двох щелеп 2. Електрогідравлічний грейфер для навантаження колод працює таким чином: по розробленому на ПК оптимальному динамічному закону руху (описано нижче), встановленому на мікроконтролері, частотний перетворювач змінює частоту живлячої напруги електродвигуна, і кутова швидкість вала змінюється відповідно запрограмованому закону. Вал електродвигуна з'єднаний з гідравлічним насосом, через який робоча рідина потрапляє в розподільник, увімкнений на положення закривання щелеп. Тоді шток гідроциліндра висовується і щелепи закриваються. Розвантажується механізм наступним чином: розподільник вмикається в положення відкривання, шток гідроциліндра засовується і щелепи розкриваються. Переміщення штока гідроциліндра характеризується координатою x , а переміщення щелеп визначаються координатами 1 і 2 , які визначаються залежностями (кінематична схема фіг. 2): B2 AC 1 arccos B A , 1 e x c 2 b2 d2 2bdcos 2 arccos{ [a d cos( 1) ]} b 2 2(e x) , в яких для спрощення виразу використаємо наступні рівняння: 40 A b2 2bdcos d2 ; B C 45 1 c 2 b2 d2 2bdcos (b d cos )( e x ) 2 ex ; 1 c 2 b2 d2 2bdcos 2 (e x ) d2 sin2 4 ex , де a - відстань між осями повороту грейфера; b, d - відстані від осей повороту щелеп до осей їх з'єднання з іншими ланками грейфера; c - довжина тяги; e - довжина штока гідроциліндра; - кут розвороту щелепи між кінематичними парами A і D . Кут , що показує нахил тяги до горизонту, визначається за таким виразом: e x 2 c 2 b2 d2 2bd cos arccos 2c e x . 1 UA 88271 U Для знаходження оптимального динамічного режиму руху привідного механізму використано інтегральний критерій, який являє собою середнє значення динамічної складової за час руху: t IV 5 1 1 Vdt t1 0 , де t - час; t1 - тривалість руху штока гідроциліндра з одного крайнього положення в інше; V - енергія прискорень механічної системи. V 1 1 1 1 1 1 2 2 2 2 m1WA m2 WB JO22 JO11 m5 K K JK 2 x2 y2 2 2 2 2 2 2 , де m1, m2, m5 - відповідно маси штока, гільзи гідроциліндра та важеля; JO1, JO2 - моменти інерції щелеп відносно осей обертання; JK - момент інерції важеля відносно центра мас; 10 WA , WB - лінійні швидкості точок А і В щелеп грейфера; K , K - горизонтальна та вертикальна x y складові прискорень центра мас важеля; 1, 2, - кутові прискорення відповідно лівої, правої щелеп та тяги. Для даного закону визначимо необхідну умову мінімуму критерію - рівняння ЕйлераПуассона: d V V 0 dt x x . 15 Розв'язання вказаного рівняння є досить складною задачею, яка не може бути розв'язана в аналітичному вигляді. Тому використано прямий варіаційний метод. Задамо необхідні крайові умови: x x 0 x 0 ; x 0 0; 0 0; x( t1 / 3) q1; x ( 2 t1 / 3 ) q 2 ; x t1 x 0 s; x t1 0; t1 0. x Згідно з методом знаходимо опорну функцію, яка є розв'язком крайової задачі: x( t ) 20 25 30 1 8t17 (729q1t 3 (3t 2t1)( t t1)3 (3t t1)( 729q2 t 3 ( t t1)3 (3t 2t1) (st 3 (141t 2 312tt1 175t12 ) t1(81t 4 162t 3 t1 63t 2t12 18tt13 4t14 )x0))) , де q1, q2 - положення штока гідроциліндра; s - хід штока гідроциліндра; x 0 - початкове положення гідроциліндра. Отриманий закон являє собою оптимальний режим руху, що забезпечує мінімум динамічних навантажень. Графіки переміщень, швидкостей і прискорень руху щелеп побудовані згідно з даним законом (фіг. 3-6). Корисна модель дає змогу спростити існуючу конструкцію, зменшити енергоємність технологічного процесу, подовжити строк служби та запобігти передчасному руйнуванню механізму зменшенням динамічних навантажень системи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Електрогідравлічний грейфер для колод, що містить траверсу, електродвигун, гідравлічний насос, розподільник, дві щелепи, який відрізняється тим, що додатково містить мікроконтролер, частотний перетворювач, горизонтальний гідроциліндр та синхронізуючу тягу. 2 UA 88271 U 3 UA 88271 U 4 UA 88271 U 5 UA 88271 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюLoveikin Viacheslav Serhiiovych
Автори російськоюЛовейкин Вячеслав Сергеевич
МПК / Мітки
Мітки: колод, грейфер, електрогідравлічний
Код посилання
<a href="https://ua.patents.su/8-88271-elektrogidravlichnijj-grejjfer-dlya-kolod.html" target="_blank" rel="follow" title="База патентів України">Електрогідравлічний грейфер для колод</a>
Грейфер електрогідравлічний для сипучих вантажів
Номер патенту: 50256
Опубліковано: 15.10.2002
Автори: Горохова Ніна Григорівна, Шаповалов Сергій Федорович, Фойгель Веніамін Абрамович, Матвієв Ігор Борисович
МПК: B66C 3/00
Мітки: сипучих, вантажів, грейфер, електрогідравлічний
Формула / Реферат:
Грейфер електрогідравлічний, що містить корпус із шарнірно закріпленими на ньому щелепами, гідропривід із привідними гідроциліндрами для управління роботою щелеп, який відрізняється тим, що в гідравлічну систему на зливній лінії робочої рідини з гідроциліндрів вмонтований підпірний клапан, лінія тиску сервозолотника з'єднана між підпірним клапаном та сервозолотником, лінія зливу сервозолотника входить в лінію зливу гідроциліндрів нижче...
Грейфер для лісоматеріалів
Номер патенту: 66618
Опубліковано: 10.01.2012
Автори: Лимар Петро Володимирович, Ловейкін Вячеслав Сергійович
МПК: B66C 3/16
Мітки: грейфер, лісоматеріалів
Формула / Реферат:
Грейфер для лісоматеріалів, що містить траверсу з тягами, робочий гідроциліндр, дві щелепи, кожна з яких складається з двох частин, з'єднаних між собою шарнірно-пружними елементами, який відрізняється тим, що з'єднання двох частин щелеп виконано за допомогою додаткового гідроциліндра з керуючим пристроєм, підключеного паралельно до основного робочого гідроциліндра з системою каналів, запобіжних і регулювальних клапанів.
Грейферний механізм для захвату колод
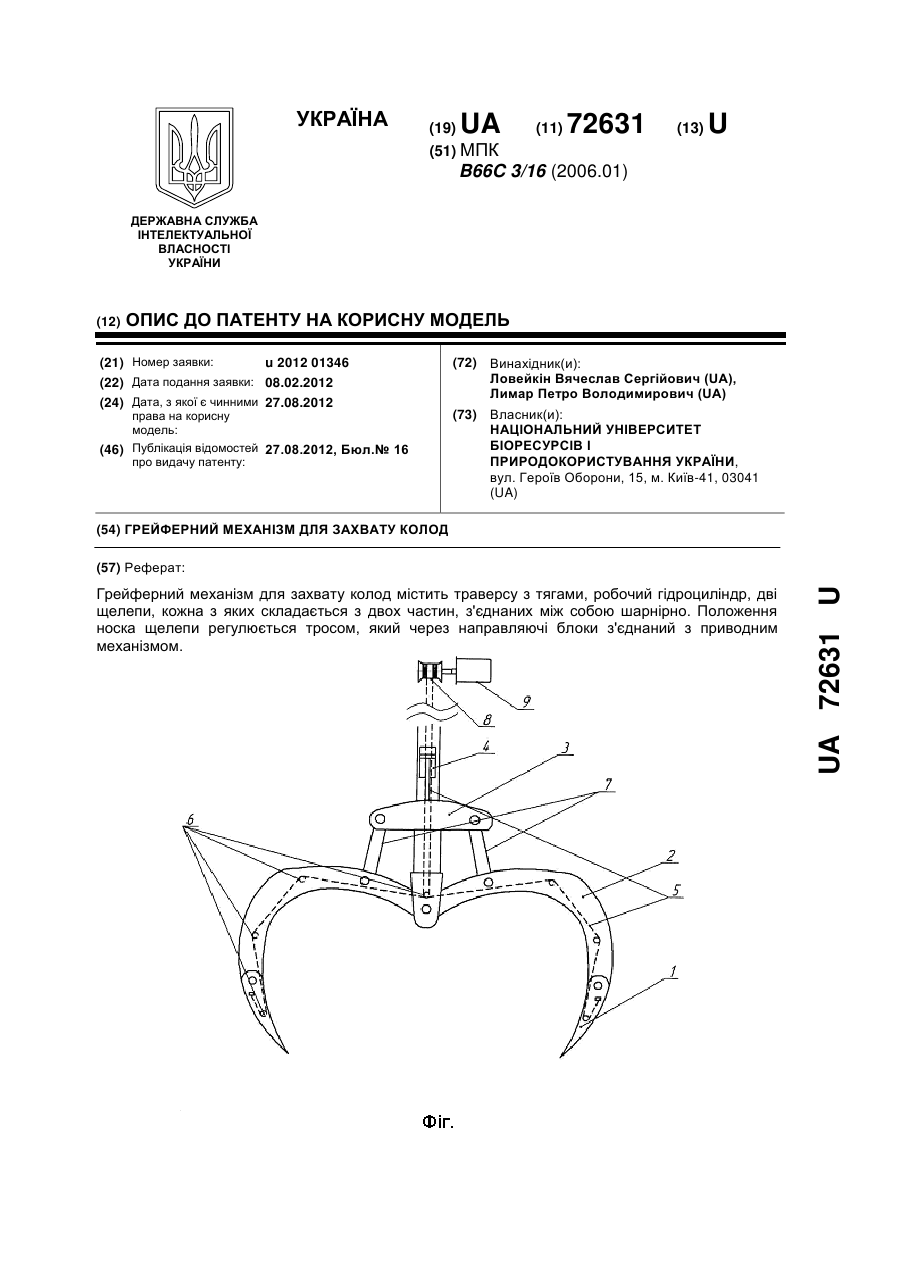
Номер патенту: 72631
Опубліковано: 27.08.2012
Автори: Лимар Петро Володимирович, Ловейкін Вячеслав Сергійович
МПК: B66C 3/16
Мітки: грейферний, колод, захвату, механізм
Формула / Реферат:
Грейферний механізм для захвату колод, що містить траверсу з тягами, робочий гідроциліндр, дві щелепи, кожна з яких складається з двох частин, з'єднаних між собою шарнірно, який відрізняється тим, що положення носка щелепи регулюється тросом, який через направляючі блоки з'єднаний з приводним механізмом.
Грейфер
Номер патенту: 37883
Опубліковано: 10.12.2008
Автори: Карсський Дмитро Олегович, Карсський Олег Володимирович
МПК: B66C 3/00
Мітки: грейфер
Формула / Реферат:
Грейфер, що містить дві щелепи, штанги, важелі, верхню головку, трособлочну систему, замикаючі канати, підйомні канати, відхиляючі блоки, при цьому до днищ щелеп прикріплені вушка для кріплення підйомних канатів, що огинають задні краї щелеп і проходять через відхиляючі блоки верхньої головки, фіксатори, який відрізняється тим, що штанги шарнірно приєднані до верхньої головки і осей повороту щелеп, важелі шарнірно сполучені нижніми кінцями із...
Грейфер для лісоматеріалів
Номер патенту: 54231
Опубліковано: 16.05.2005
Автори: Бегеба Володимир Миколайович, Бегеба Станіслав Володимирович
МПК: B66C 3/00
Мітки: лісоматеріалів, грейфер
Формула / Реферат:
Винахід відноситься до косметології і стосується рідини для зняття лаку. Рідина за винаходом містить органічний розчинник, олію рослинну, гліцерин дистильований (пропіленгліколь) i біологічно активну добавку на основі біомаси женьшеню. Як біологічно активну добавку на основі біомаси женьшеню рідина за винаходом містить препарат женьшеню або настойку «Біоженьшень», або настій із біомаси женьшеню (20%-ний водно-спиртовий розчин). Як органічний...
Попередній патент: Багатоканальний відцентровий фільтр
Наступний патент: Гідрозахват для круглих лісоматеріалів
Випадковий патент: Спосіб діагностики розвитку остеопорозу