Спосіб усунення перехресних похибок у надлишкових блоках двокомпонентних інерціальних датчиків
Номер патенту: 93638
Опубліковано: 10.10.2014
Автори: Лакоза Сергій Леонідович, Зазімко Андрій Віталійович, Мелешко Владислав Валентинович
Формула / Реферат
Спосіб усунення перехресних похибок у надлишкових блоках двокомпонентних інерціальних датчиків, що включає вимірювання сигналів, пропорційних проекціям вимірюваного вектора, за допомогою блока двокомпонентних перетворювачів, що утворюють вимірювальні базиси, виконаного зі структурно-інформаційної надлишковістю, визначення і виключення з виміряної сукупності сигналів перетворювачів, котрі відмовили, підвищення достовірності значень формованих величин шляхом визначення параметрів векторної величини роздільно як за напрямком, так і за модулем, який відрізняється тим, що у систему обробки даних з надлишкового блока введено пристрій, що на основі вихідних сигналів двокомпонентних датчиків в три етапи формує вихідний сигнал, що не містить похибок від перехресних зв'язків, домножуючи сигнали на коефіцієнти ![]() , котрі залежать від розташування осей чутливості, та послідовно віднімаючи між собою отримані сигнали, покроково усуває похибки від перехресних складових сигналу, котрі з'являються в результаті вимірювань чутливими елементами визначених параметрів руху об'єкта.
, котрі залежать від розташування осей чутливості, та послідовно віднімаючи між собою отримані сигнали, покроково усуває похибки від перехресних складових сигналу, котрі з'являються в результаті вимірювань чутливими елементами визначених параметрів руху об'єкта.
Текст
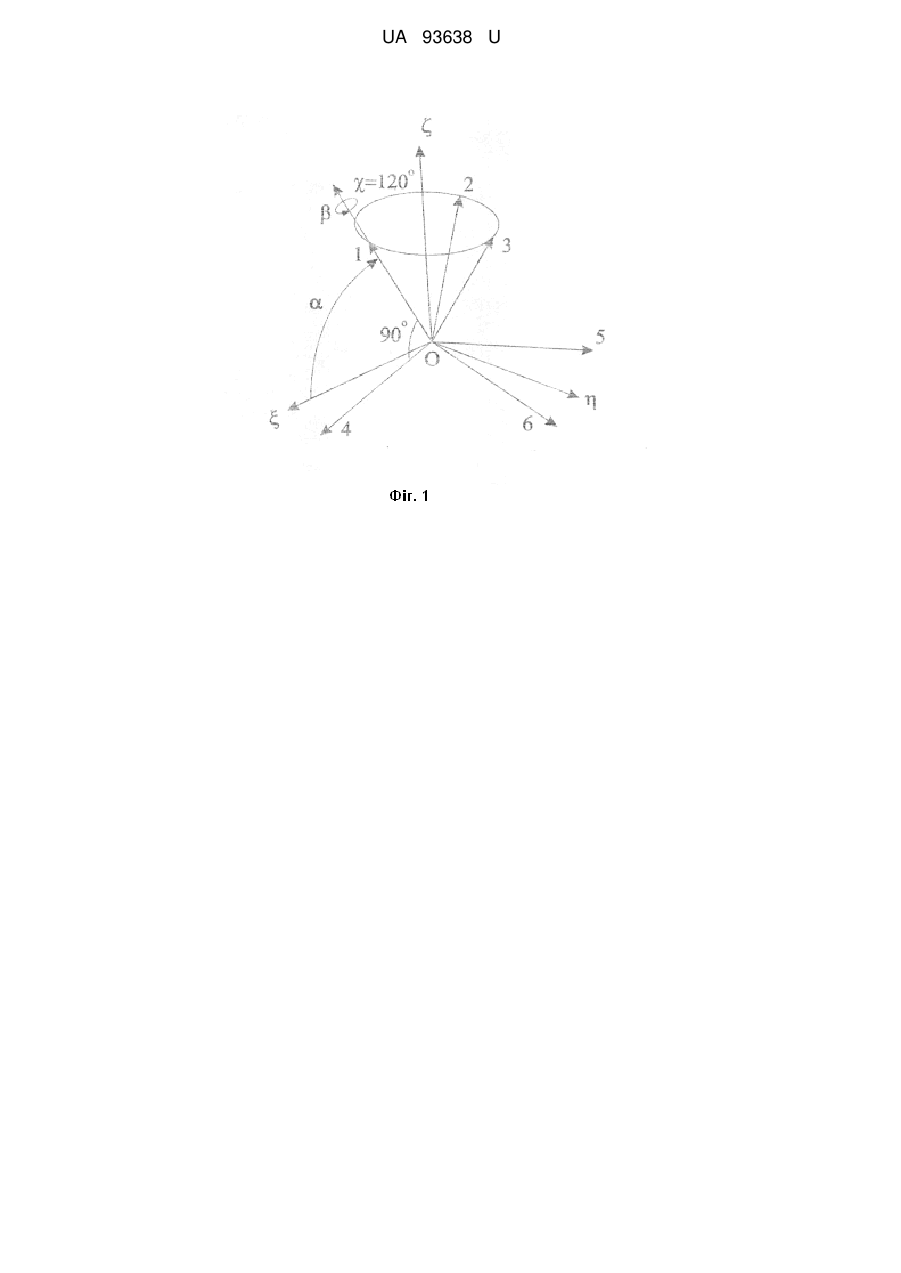
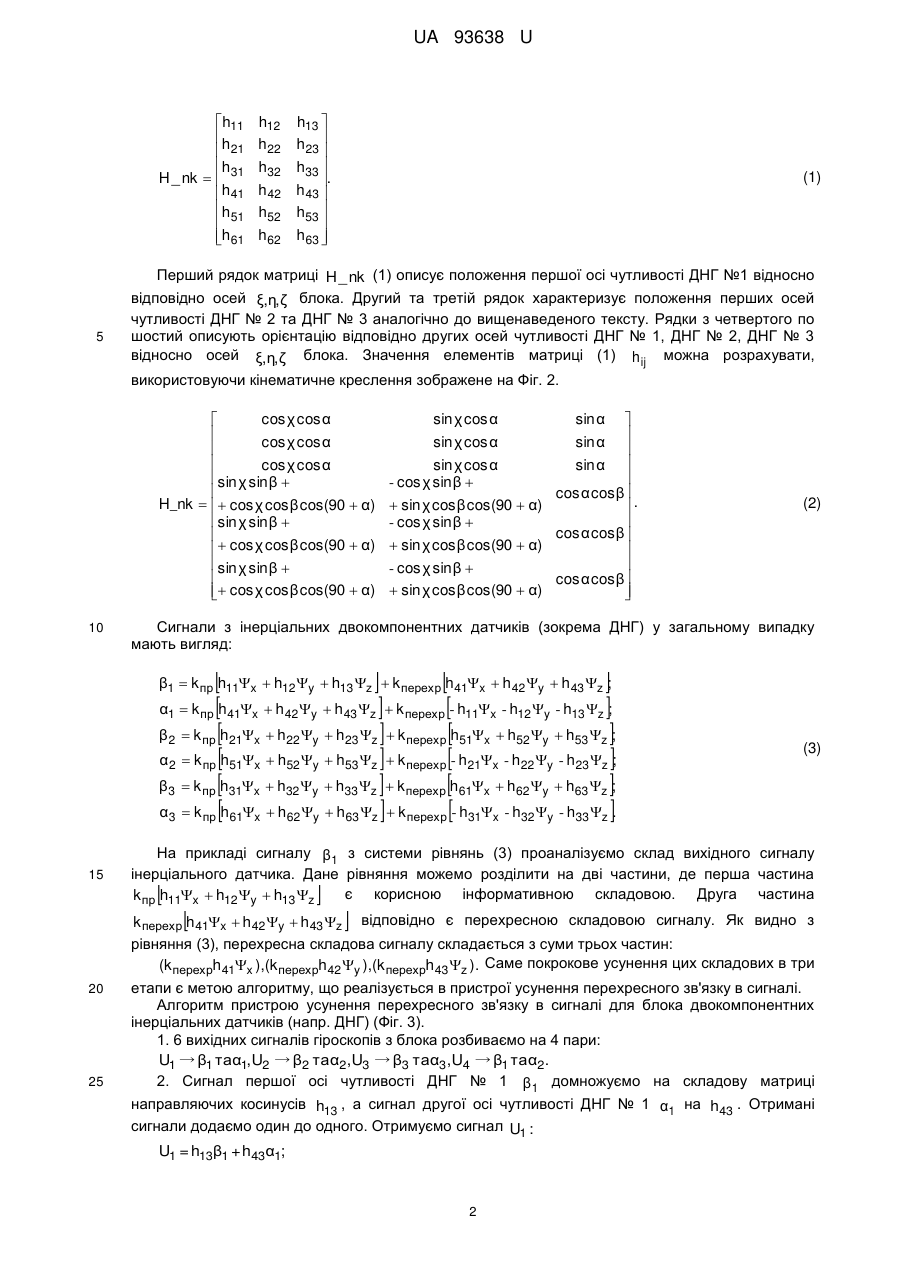
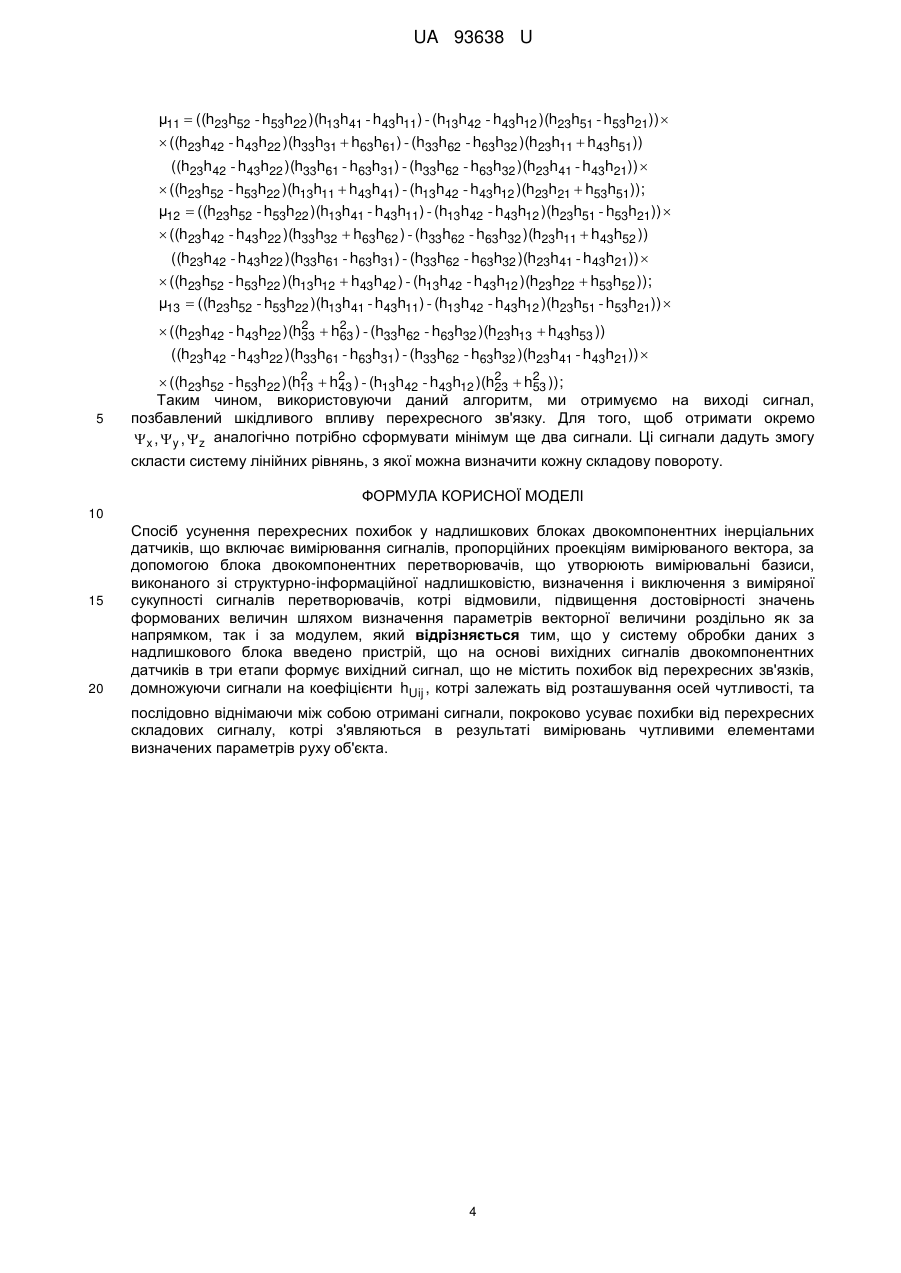
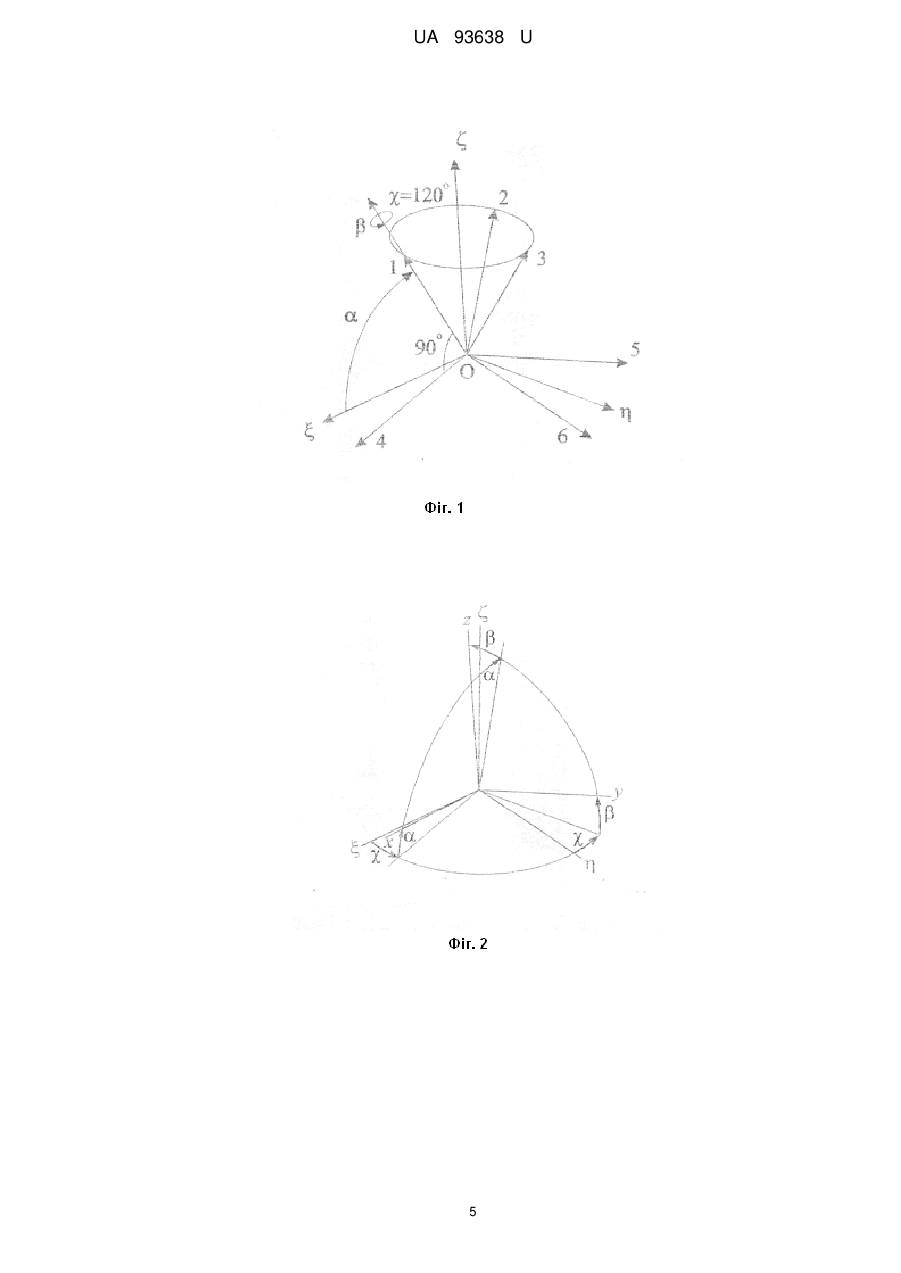
Реферат: UA 93638 U UA 93638 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до способів обробки інформації та може бути використана в навігаційній техніці для обробки сигналів з блоків з не ортогональним розташуванням надлишкових осей чутливості двокомпонентних датчиків. Задачею корисної моделі є усунення похибок, викликаних перехресними зв'язками в двокомпонентних інерціальних датчиках. Відомий відмовостійкий блок датчиків кутової швидкості [патент України на корисну модель №45149 М. кл. G01С 21/00, Відмовостійкий блок датчиків кутової швидкості, Бюл. № 20. 2009 p.], задачею якого є зменшення масо-габаритних характеристик, підвищення надійності та точності блока, що складається з датчиків кутових швидкостей. Поставлена задача вирішується тим, що чутливі осі перших двох датчиків кутових швидкостей співпадають з двома осями ортогональної системи координат. Додатково введені три датчики, вісь третього датчика кутової швидкості направлена під кутом по відношенню до третьої ортогональної осі, осі четвертого та п'ятого датчиків кутових швидкостей направлені з початку координат по діагоналі куба в 2 та 4 октанти відповідно, виходи датчиків кутових швидкостей послідовно через аналого-цифрові перетворювачі та блок діагностування підключені до блока формування кутових швидкостей [2]. Відомий патент на винахід надлишкової інерціальної вимірювальної системи [патент США на винахід № 4125017 М. кл. G01C 21/10; G01C 21/16; G01C 019/02; G01C 023/00, Redundant inertial measurement system, Family ID: 25230297, Appl. No.: 05/820,249, Filed: July 29, 1977]. Система, що забезпечує мінімальну надлишковість безплатформної IНС для вимірювання параметрів руху об'єкту в просторі. Завдяки належній орієнтації двоступеневих динамічноналагоджуваних гіроскопів (ДНГ), система здатна забезпечити повну надлишковість, використовуючи лише три гіроскопічні датчики. Це дає змогу отримати умови для виявлення та ізоляції датчиків, що відмовили. Відомий патент на метод вимірювання сигналів векторним вимірювачем при структурноінформаційній надлишковості [патент Росії на винахід № 2011950 М. кл. G01C 21/00, Способ измерения сигналов векторным измерителем при структурно-информационной избыточности, дата публикации 30.04.1994], що включає в себе метод виміру сигналів, пропорційних проекціям вимірюваного вектора, за допомогою блока перетворювачів, що утворюють вимірювальні базиси, виконаного зі структурно-інформаційною надлишковістю. З метою підвищення достовірності значень формованих величин, додатково виконують визначення параметрів векторної величини роздільно як за напрямком, так і за модулем. При цьому сукупність вимірювальних базисів формується з урахуванням впливу орієнтації вимірювальних базисів щодо вимірюваного вектора на достовірність вимірювань перетворювачів, осі чутливості яких утворюють вимірювальний базис [4]. Недоліками зазначених вище патентів можна вважати те, що в них приділяється увага лише виявленню та ізоляції датчиків, що відмовили. У них не оцінюється якість сигналу з подібним розташуванням, а саме не передбачено способів виявлення та компенсації похибок від перехресних складових сигналів. Задача корисної моделі - підвищення точності вимірювань інерціальних датчиків шляхом усунення перехресних складових з вихідних сигналів чутливих елементів блока з не ортогональною орієнтацією двокомпонентних інерціальних датчиків. Поставлена задача вирішується тим, що у способі усунення перехресних похибок у надлишкових блоках двокомпонентних інерціальних датчиків, що включає вимірювання сигналів, пропорційних проекціям вимірюваного вектора, за допомогою блока двокомпонентних перетворювачів, що утворюють вимірювальні базиси, виконаного зі структурно-інформаційної надлишковістю, визначення і виключення з виміряної сукупності сигналів перетворювачів, котрі відмовили, підвищення достовірності значень формованих величин шляхом визначення параметрів векторної величини роздільно як за напрямком, так і за модулем новим є те, що у систему обробки даних з надлишкового блока введено пристрій, що на основі вихідних сигналів двокомпонентних датчиків в три етапи формує вихідний сигнал, що не містить похибок від перехресних зв'язків, домножуючи сигнали на коефіцієнти hUij , котрі залежать від розташування осей чутливості, та послідовно віднімаючи між собою отримані сигнали, покроково усуває похибки від перехресних складових сигналу, котрі з'являються в результаті вимірювань чутливими елементами визначених параметрів руху об'єкта. Корисна модель пояснюється схемами на Фіг. 1, 2 та Фіг. 3. Суть корисної моделі пояснимо, використовуючи надлишковий блок, що складаються з трьох динамічно налагоджуваних гіроскопів. Орієнтація осей чутливості відносно вихідної системи координат такого блока показана на Фіг. 1. Орієнтація осей чутливості даного блока описується матрицею направляючих косинусів наступного вигляду: 1 UA 93638 U h11 h 21 h H _ nk 31 h 41 h 51 h 61 5 h12 h 22 h32 h 42 h52 h 62 h13 h 23 h33 . h 43 h53 h 63 (1) Перший рядок матриці H _ nk (1) описує положення першої осі чутливості ДНГ №1 відносно відповідно осей ξ,η, ζ блока. Другий та третій рядок характеризує положення перших осей чутливості ДНГ № 2 та ДНГ № 3 аналогічно до вищенаведеного тексту. Рядки з четвертого по шостий описують орієнтацію відповідно других осей чутливості ДНГ № 1, ДНГ № 2, ДНГ № 3 відносно осей ξ,η, ζ блока. Значення елементів матриці (1) h ij можна розрахувати, використовуючи кінематичне креслення зображене на Фіг. 2. cos χ cos α cos χ cos α cos χ cos α sin χ sin β H_nk cos χ cos β cos(90 α) sin χ sin β cos χ cos β cos(90 α) sin χ sin β cos χ cos β cos(90 α) 10 sin χ cos α sin α sin χ cos α sin α - cos χ sin β cos α cos β sin χ cos β cos(90 α) . - cos χ sin β cos α cos β sin χ cos β cos(90 α) - cos χ sin β cos α cos β sin χ cos β cos(90 α) sin χ cos α sin α (2) Сигнали з інерціальних двокомпонентних датчиків (зокрема ДНГ) у загальному випадку мають вигляд: α1 k пр h 41x h 42 y h 43 z k перехр - h11x - h12 y - h13 z ; β 2 k пр h 21x h 22 y h 23 z k перехр h51x h52 y h53 z ; α 2 k пр h51x h52 y h53 z k перехр - h 21x - h 22 y - h 23 z ; β 3 k пр h31x h32 y h33 z k перехр h 61x h 62 y h 63 z ; α 3 k пр h 61x h 62 y h 63 z k перехр - h31x - h32 y - h33 z . β1 k пр h11x h12 y h13 z k перехр h 41x h 42 y h 43 z ; 15 (3) На прикладі сигналу β1 з системи рівнянь (3) проаналізуємо склад вихідного сигналу інерціального датчика. Дане рівняння можемо розділити на дві частини, де перша частина є корисною інформативною складовою. Друга частина k пр h11x h12 y h13 z k перехр h 41x h 42 y h 43 z відповідно є перехресною складовою сигналу. Як видно з рівняння (3), перехресна складова сигналу складається з суми трьох частин: (k перехрh 41x ),(k перехрh 42 y ),(k перехрh 43 z ). Саме покрокове усунення цих складових в три 20 25 етапи є метою алгоритму, що реалізується в пристрої усунення перехресного зв'язку в сигналі. Алгоритм пристрою усунення перехресного зв'язку в сигналі для блока двокомпонентних інерціальних датчиків (напр. ДНГ) (Фіг. 3). 1. 6 вихідних сигналів гіроскопів з блока розбиваємо на 4 пари: U1 → β1 таα1,U2 → β2 таα2,U3 → β3 таα3,U4 → β1 та α2. 2. Сигнал першої осі чутливості ДНГ № 1 β1 домножуємо на складову матриці направляючих косинусів h13 , а сигнал другої осі чутливості ДНГ № 1 α1 на h43 . Отримані сигнали додаємо один до одного. Отримуємо сигнал U1 : U1 = h13β1 + h43 α1; 2 UA 93638 U 2 U1 h13h11 h 43h 41 x h13h12 h 43h 42 y h13 h2 z k pr 43 h13h 41 - h 43h11 x h13h 42 - h 43h12 y k perehr . 3. Сигнал першої осі чутливості ДНГ № 2 β 2 домножуємо на складову матриці направляючих косинусів h23 , а сигнал другої осі чутливості ДНГ № 2 α 2 на h53 . Отримані сигнали додаємо один до одного. Отримуємо сигнал U2 : 5 U2 = h23β2 + h53 α2 ; 2 U2 h23h21 h53h51 x h23h22 h53h52 y h2 h53 z k pr 23 h23h51 - h53h21 x h23h52 - h53h22 y k perehr . 4. Сигнал першої осі чутливості ДНГ № 3 β 3 домножуємо на складову матриці направляючих косинусів h23 , а сигнал другої осі чутливості ДНГ № 3 α 3 на h63 . Отримані сигнали додаємо один до одного. Отримуємо сигнал U3 : 10 U3 = h33β3 + h63 α3 ; 2 U3 h33h31 h63h61 x h33h32 h63h62 y h33 h2 z k pr 63 h33h61 - h63h31 x h33h62 - h63h32 y k perehr . 5. Сигнал першої осі чутливості ДНГ № 1 β1 домножуємо на складову матриці направляючих косинусів h23 , а сигнал другої осі чутливості ДНГ № 2 α 2 на h43 . Отримані сигнали додаємо один до одного. Отримуємо сигнал U4 : 15 U4 h23β1 h 43 α 2 ; U4 h 23 h11 h 43 h51 x h 23 h12 h 43 h52 y h 23 h13 h 43 h 53 z k pr h 23 h 41 - h 43 h 21 x h 23 h 42 - h 43 h 22 y 6. Сигнал U1 домножуємо на коефіцієнт hU1 h13h42 - h43h12 . Від сигналу U1 hU2 U12 hU2 U1 - hU1 U2 . k perehr . hU2 h23h52 - h53h22 , а сигнал U2 на коефіцієнт віднімаємо сигнал U2 hU1 . U12 (((h23h52 - h53h22 )(h13h11 h43h41) - (h13h 42 - h 43h12 )(h23h21 h53h51)) x 20 ((h23h52 - h53h22 )(h13h12 h 43h42 ) - (h13h42 - h43h12 )(h23h22 h53h52 )) y 2 2 ((h23h52 - h53h22 )(h13 h2 ) - (h13h42 - h43h12 )(h2 h53 )) z ) k pr 43 23 ((h23h52 - h53h22 )(h13h 42 - h 43h11) - (h13h 42 - h 43h12 )(h23h51 - h53h21)) xk perehr . 7. Сигнал U3 домножуємо на коефіцієнт hU4 h23h42 - h43h22 , а сигнал U4 домножуємо на коефіцієнт hU3 h33h62 - h63h32 . Від сигналу U3 hU4 віднімаємо сигнал U4 hU3 . U34 hU4 U3 - hU3U4 . U34 (((h23h42 - h43h22 )(h13h31 h63h61) - (h33h62 - h63h32 )(h23h11 h43h51))x ((h23h42 - h 43h22 )(h33h32 h63h62 ) - (h33h62 - h63h32 )(h23h12 h 43h52 ))y 2 ((h23h42 - h 43h22 )(h33 h2 ) - (h33h62 - h63h32 )(h23h13 h43h53 ))z )k pr 63 25 30 ((h23h42 - h 43h22 )(h33h61 - h63h31) - (h33h62 - h63h32 )(h23h41 - h43h21))xk perehr . 8. Сигнал домножуємо на коефіцієнт U12 а сигнал hU34 (h23h42 - h43h22 )(h33h61 - h63h31) - (h33h62 - h63h32 )(h23h41 - h43h21) , U34 домножуємо на коефіцієнт hU12 (h23h52 - h53h22 )(h13h41 - h43h11) - (h13h42 - h43h12 )(h23h51 - h53h21) . Від сигналу U12 hU34 віднімаємо сигнал U34 hU12 . U1 hU34 U12 - hU12U34 . U1 k pr (μ11 x μ12 y μ13 z ) , де коефіцієнти μ11, μ12 , μ13 дорівнюють: 3 UA 93638 U μ11 ((h23h52 - h53h22 )(h13h 41 - h43h11) - (h13h 42 - h43h12 )(h23h51 - h53h21)) ((h23h 42 - h43h22 )(h33h31 h63h61) - (h33h62 - h63h32 )(h23h11 h43h51)) ((h23h 42 - h43h22 )(h33h61 - h63h31) - (h33h62 - h63h32 )(h23h41 - h43h21)) ((h23h52 - h53h22 )(h13h11 h43h41) - (h13h42 - h43h12 )(h23h21 h53h51)); μ12 ((h23h52 - h53h22 )(h13h41 - h43h11) - (h13h42 - h43h12 )(h23h51 - h53h21)) ((h23h42 - h43h22 )(h33h32 h63h62 ) - (h33h62 - h63h32 )(h23h11 h43h52 )) ((h23h42 - h43h22 )(h33h61 - h63h31) - (h33h62 - h63h32 )(h23h41 - h43h21)) ((h23h52 - h53h22 )(h13h12 h43h42 ) - (h13h42 - h43h12 )(h23h22 h53h52 )); μ13 ((h23h52 - h53h22 )(h13h41 - h43h11) - (h13h42 - h43h12 )(h23h51 - h53h21)) 2 ((h23h42 - h43h22 )(h33 h2 ) - (h33h62 - h63h32 )(h23h13 h43h53 )) 63 ((h23h42 - h43h22 )(h33h61 - h63h31) - (h33h62 - h63h32 )(h23h41 - h43h21)) 5 2 2 ((h23h52 - h53h22 )(h13 h2 ) - (h13h42 - h43h12 )(h2 h53 )); 43 23 Таким чином, використовуючи даний алгоритм, ми отримуємо на виході сигнал, позбавлений шкідливого впливу перехресного зв'язку. Для того, щоб отримати окремо x , y , z аналогічно потрібно сформувати мінімум ще два сигнали. Ці сигнали дадуть змогу скласти систему лінійних рівнянь, з якої можна визначити кожну складову повороту. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 Спосіб усунення перехресних похибок у надлишкових блоках двокомпонентних інерціальних датчиків, що включає вимірювання сигналів, пропорційних проекціям вимірюваного вектора, за допомогою блока двокомпонентних перетворювачів, що утворюють вимірювальні базиси, виконаного зі структурно-інформаційної надлишковістю, визначення і виключення з виміряної сукупності сигналів перетворювачів, котрі відмовили, підвищення достовірності значень формованих величин шляхом визначення параметрів векторної величини роздільно як за напрямком, так і за модулем, який відрізняється тим, що у систему обробки даних з надлишкового блока введено пристрій, що на основі вихідних сигналів двокомпонентних датчиків в три етапи формує вихідний сигнал, що не містить похибок від перехресних зв'язків, домножуючи сигнали на коефіцієнти hUij , котрі залежать від розташування осей чутливості, та послідовно віднімаючи між собою отримані сигнали, покроково усуває похибки від перехресних складових сигналу, котрі з'являються в результаті вимірювань чутливими елементами визначених параметрів руху об'єкта. 4 UA 93638 U 5 UA 93638 U Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюMeleshko Vladyslav Valentynovych, Lakoza Serhii Leonidovych
Автори російськоюМелешко Владислав Валентинович, Лакоза Сергей Леонидович
МПК / Мітки
МПК: G01C 21/00
Мітки: блоках, датчиків, інерціальних, надлишкових, похибок, спосіб, двокомпонентних, усунення, перехресних
Код посилання
<a href="https://ua.patents.su/8-93638-sposib-usunennya-perekhresnikh-pokhibok-u-nadlishkovikh-blokakh-dvokomponentnikh-inercialnikh-datchikiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб усунення перехресних похибок у надлишкових блоках двокомпонентних інерціальних датчиків</a>
Спосіб оптимального розміщення двокомпонентних датчиків у вимірювачі векторних величин
Номер патенту: 106796
Опубліковано: 10.10.2014
Автори: Лакоза Сергій Леонідович, Мелешко Владислав Валентинович
МПК: G01C 21/00
Мітки: величин, розміщення, датчиків, спосіб, векторних, вимірювачі, оптимального, двокомпонентних
Формула / Реферат:
Спосіб оптимального розміщення двокомпонентних датчиків у вимірювачі векторних величин, який відрізняється тим, що перші осі чутливостей двокомпонентних датчиків розташовують рівномірно на поверхні конуса, твірна якого відхилена на кут від площини, що створена поздовжньою та поперечною осями вимірювача, а положення другої осі чутливості кожного з двокомпонентних датчиків...
Спосіб калібрування інерціальних датчиків
Номер патенту: 106614
Опубліковано: 25.09.2014
Автор: Даше Деміен
МПК: G01P 21/00, G01C 25/00
Мітки: датчиків, калібрування, спосіб, інерціальних
Формула / Реферат:
1. Спосіб калібрування інерціальних датчиків робочого обладнання, який включає: збір даних від одного або більше інерціальних датчиків та від одного або більше датчиків температури, розташованих поблизу інерціальних датчиків, коли робоче обладнання не в роботі, та оновлення моделі температурної систематичної похибки для інерціальних датчиків даними, зібраними від інерціальних датчиків та датчиків температури, причому...
Безплатформний навігаційний комплекс з інерціальною системою орієнтації на “грубих” чутливих елементах і спосіб корекції його інерціальних датчиків
Номер патенту: 103858
Опубліковано: 25.11.2013
Автори: Алексеев Сергій Юрійович, Греков Миколай Олександрович, Греков Олександр Миколайович
МПК: G01C 23/00
Мітки: грубих, навігаційний, елементах, чутливих, комплекс, корекції, системою, спосіб, інерціальних, безплатформний, інерціальною, орієнтації, датчиків
Формула / Реферат:
1. Безплатформний навігаційний комплекс з інерціальною системою орієнтації на "грубих" чутливих елементах, яка підключена до обчислювальної платформи і містить розташовані за трьома ортогональними осями три акселерометри і три датчики кутових швидкостей, який відрізняється тим, що він додатково містить підключені до обчислювальної платформи трьохосьовий магнітний компас і гідростатичний блок нахилу, що містить три диференціальних...
Спосіб визначення похибок датчиків систем автоматичного регулювання параметрів технологічних процесів та пристрій для його здійснення
Номер патенту: 18197
Опубліковано: 01.07.1997
Автори: Дубровний Віктор Опанасович, Скрипник Юрій Олексійович, Шевченко Костянтин Леонідович
МПК: G05B 23/00
Мітки: пристрій, параметрів, регулювання, похибок, спосіб, визначення, технологічних, здійснення, автоматичного, систем, процесів, датчиків
Формула / Реферат:
1. Способ определения погрешностей датчиков систем автоматического регулирования параметров технологических процессов, заключающийся в том, что задатчиком устанавливают требуемое значение параметра технологического процесса, изменяют выходной сигнал датчика несколько раз, меняя соответствующим образом измеряемый параметр технологического процесса и вычисляют погрешности датчика по значениям калиброванных воздействий на выходной сигнал...
Перехідний узгоджуючий пристрій до двокомпонентних калоприймачів
Номер патенту: 5166
Опубліковано: 15.02.2005
Автор: Краснер Юхим Борисович
МПК: A61G 9/00
Мітки: калоприймачів, перехідний, узгоджуючий, двокомпонентних, пристрій
Формула / Реферат:
Перехідний узгоджуючий пристрій до двокомпонентних калоприймачів, який виконаний у вигляді тонкої плоскої пластинки з отвором по її центру і фланцевими кільцями з обох її сторін, які розташовані концентрично відносно отвору, причому фланцеве кільце, розташоване з однієї сторони тонкої плоскої пластинки, сумісно з пластиною двокомпонентного калоприймача одного виробника, а фланцеве кільце, розташоване з іншої сторони тонкої плоскої пластинки,...
Попередній патент: Білковий комплекс феритин
Наступний патент: Конвеєрні ваги
Випадковий патент: Автоматизоване робоче місце спортивного лікаря