Спосіб оптимального розміщення двокомпонентних датчиків у вимірювачі векторних величин
Номер патенту: 106796
Опубліковано: 10.10.2014
Автори: Лакоза Сергій Леонідович, Мелешко Владислав Валентинович


Формула / Реферат
Спосіб оптимального розміщення двокомпонентних датчиків у вимірювачі векторних величин, який відрізняється тим, що перші осі чутливостей двокомпонентних датчиків розташовують рівномірно на поверхні конуса, твірна якого відхилена на кут ![]() від площини, що створена поздовжньою та поперечною осями вимірювача, а положення другої осі чутливості кожного з двокомпонентних датчиків визначають поворотом навколо його першої осі чутливості на кут β, який розраховують згідно з формулою
від площини, що створена поздовжньою та поперечною осями вимірювача, а положення другої осі чутливості кожного з двокомпонентних датчиків визначають поворотом навколо його першої осі чутливості на кут β, який розраховують згідно з формулою ![]() ,
, ![]() .
.
Текст
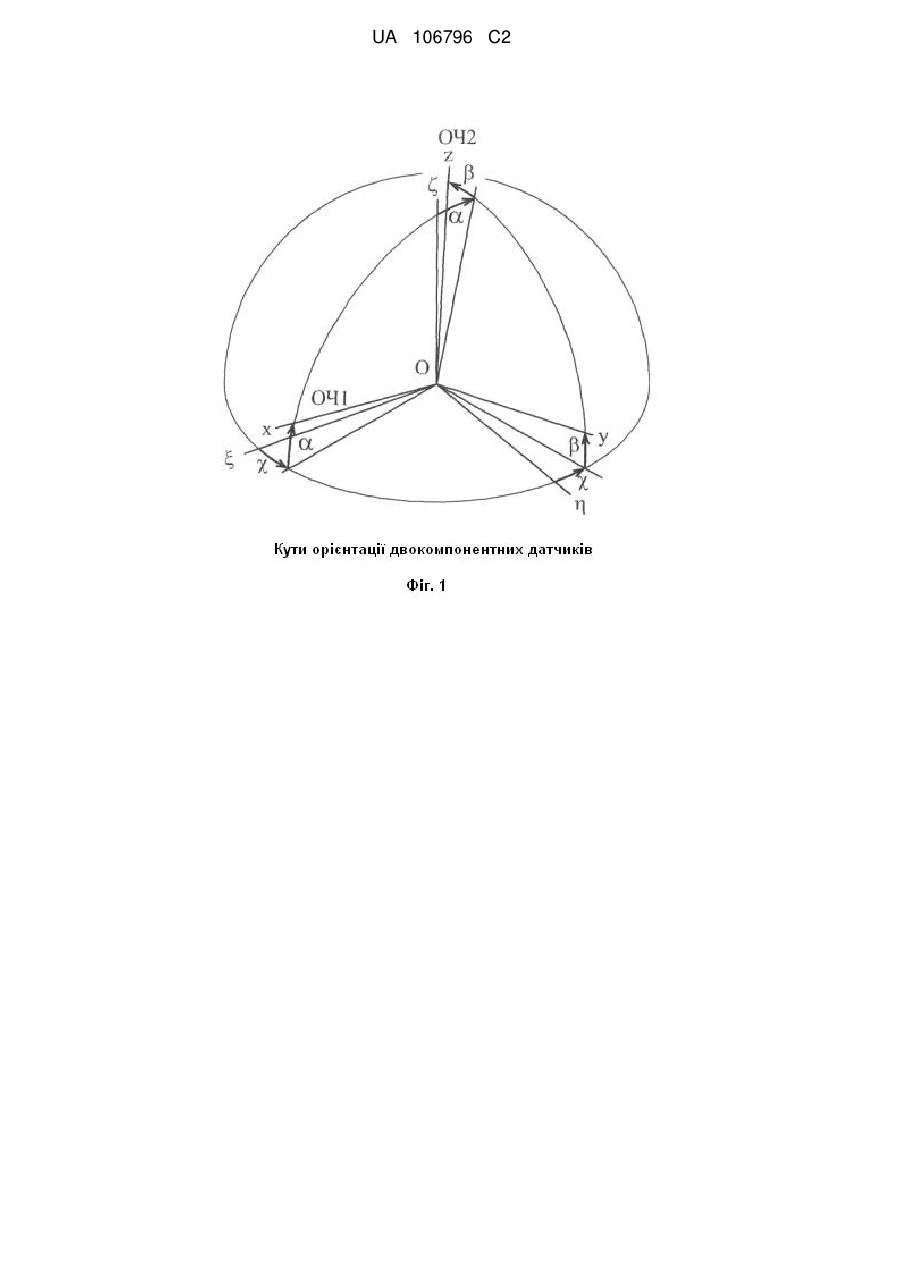
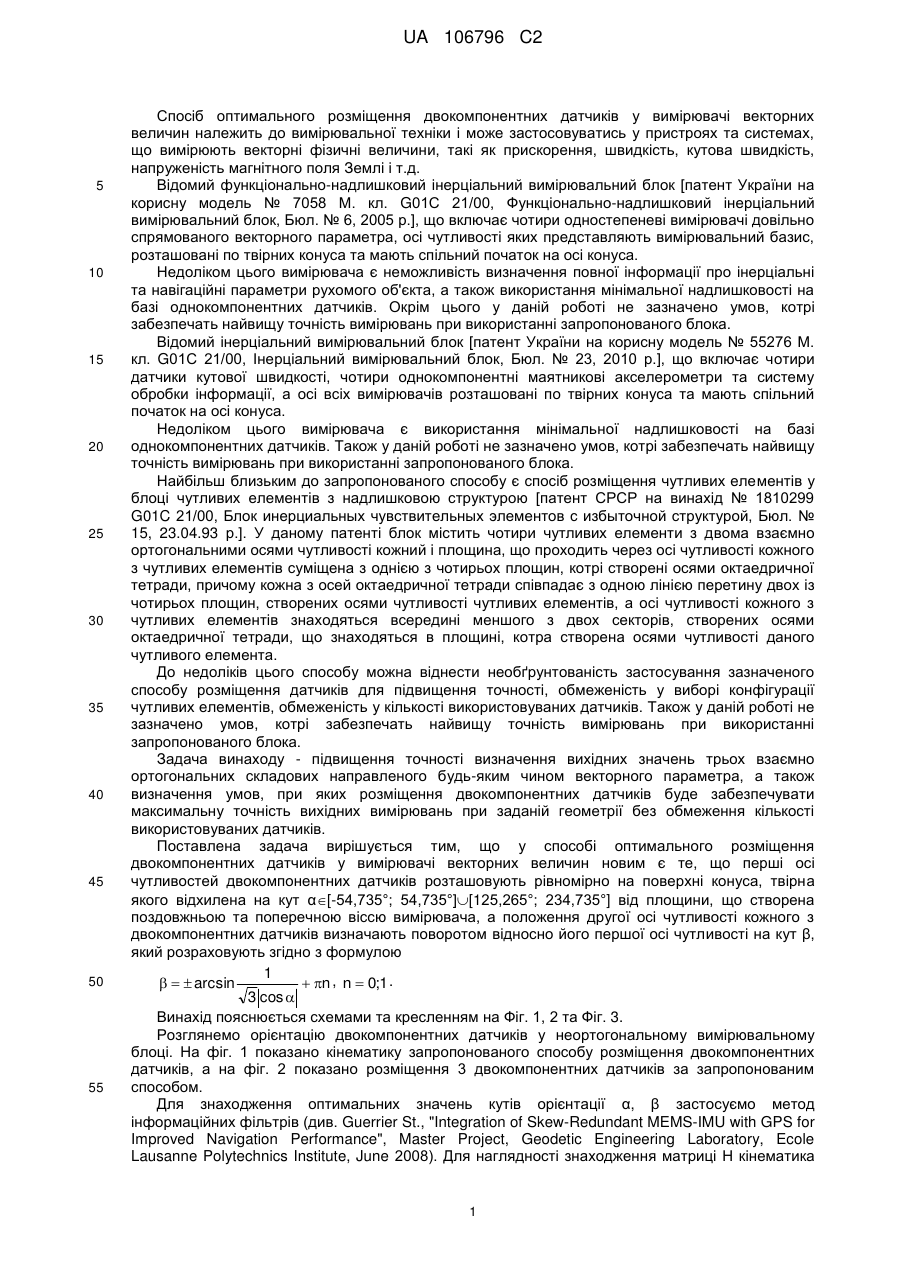
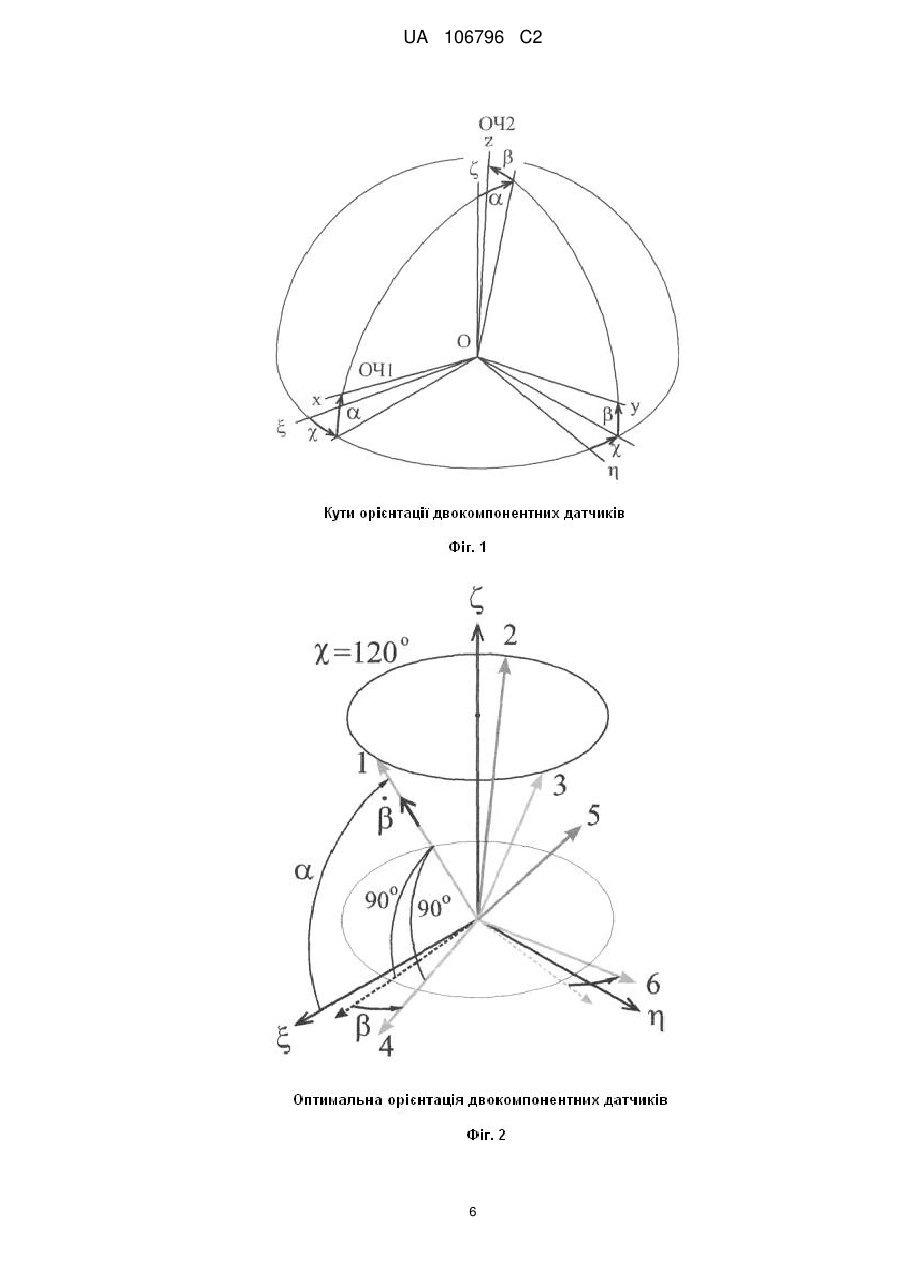
Реферат: Винахід належить до вимірювальної техніки і може застосовуватись у пристроях та системах, що вимірюють векторні фізичні величини. Спосіб оптимального розміщення двокомпонентних датчиків у вимірювачі векторних величин полягає у розташуванні рівномірно на поверхні конуса, твірна якого відхилена на кут α, що визначається певним чином, від площини, що створена поздовжньою та поперечною віссю вимірювача. Положення другої осі чутливості кожного з двокомпонентних датчиків визначають поворотом відносно його першої осі чутливості на кут β, який розраховують згідно з певним співвідношенням. Технічним результатом винаходу є підвищення точності визначення вихідних значень трьох взаємно ортогональних складових направленого будь-яким чином векторного параметра, а також визначення умов, при яких розміщення двокомпонентних датчиків буде забезпечувати максимальну точність вихідних вимірювань при заданій геометрії без обмеження кількості використовуваних датчиків. UA 106796 C2 (12) UA 106796 C2 UA 106796 C2 5 10 15 20 25 30 35 40 45 50 55 Спосіб оптимального розміщення двокомпонентних датчиків у вимірювачі векторних величин належить до вимірювальної техніки і може застосовуватись у пристроях та системах, що вимірюють векторні фізичні величини, такі як прискорення, швидкість, кутова швидкість, напруженість магнітного поля Землі і т.д. Відомий функціонально-надлишковий інерціальний вимірювальний блок [патент України на корисну модель № 7058 М. кл. G01С 21/00, Функціонально-надлишковий інерціальний вимірювальний блок, Бюл. № 6, 2005 р.], що включає чотири одностепеневі вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса та мають спільний початок на осі конуса. Недоліком цього вимірювача є неможливість визначення повної інформації про інерціальні та навігаційні параметри рухомого об'єкта, а також використання мінімальної надлишковості на базі однокомпонентних датчиків. Окрім цього у даній роботі не зазначено умов, котрі забезпечать найвищу точність вимірювань при використанні запропонованого блока. Відомий інерціальний вимірювальний блок [патент України на корисну модель № 55276 М. кл. G01С 21/00, Інерціальний вимірювальний блок, Бюл. № 23, 2010 р.], що включає чотири датчики кутової швидкості, чотири однокомпонентні маятникові акселерометри та систему обробки інформації, а осі всіх вимірювачів розташовані по твірних конуса та мають спільний початок на осі конуса. Недоліком цього вимірювача є використання мінімальної надлишковості на базі однокомпонентних датчиків. Також у даній роботі не зазначено умов, котрі забезпечать найвищу точність вимірювань при використанні запропонованого блока. Найбільш близьким до запропонованого способу є спосіб розміщення чутливих елементів у блоці чутливих елементів з надлишковою структурою [патент СРСР на винахід № 1810299 G01C 21/00, Блок инерциальных чувствительных элементов с избыточной структурой, Бюл. № 15, 23.04.93 р.]. У даному патенті блок містить чотири чутливих елементи з двома взаємно ортогональними осями чутливості кожний і площина, що проходить через осі чутливості кожного з чутливих елементів суміщена з однією з чотирьох площин, котрі створені осями октаедричної тетради, причому кожна з осей октаедричної тетради співпадає з одною лінією перетину двох із чотирьох площин, створених осями чутливості чутливих елементів, а осі чутливості кожного з чутливих елементів знаходяться всередині меншого з двох секторів, створених осями октаедричної тетради, що знаходяться в площині, котра створена осями чутливості даного чутливого елемента. До недоліків цього способу можна віднести необґрунтованість застосування зазначеного способу розміщення датчиків для підвищення точності, обмеженість у виборі конфігурації чутливих елементів, обмеженість у кількості використовуваних датчиків. Також у даній роботі не зазначено умов, котрі забезпечать найвищу точність вимірювань при використанні запропонованого блока. Задача винаходу - підвищення точності визначення вихідних значень трьох взаємно ортогональних складових направленого будь-яким чином векторного параметра, а також визначення умов, при яких розміщення двокомпонентних датчиків буде забезпечувати максимальну точність вихідних вимірювань при заданій геометрії без обмеження кількості використовуваних датчиків. Поставлена задача вирішується тим, що у способі оптимального розміщення двокомпонентних датчиків у вимірювачі векторних величин новим є те, що перші осі чутливостей двокомпонентних датчиків розташовують рівномірно на поверхні конуса, твірна якого відхилена на кут α[-54,735°; 54,735°][125,265°; 234,735°] від площини, що створена поздовжньою та поперечною віссю вимірювача, а положення другої осі чутливості кожного з двокомпонентних датчиків визначають поворотом відносно його першої осі чутливості на кут β, який розраховують згідно з формулою 1 arcsin n , n 0;1 . 3 cos Винахід пояснюється схемами та кресленням на Фіг. 1, 2 та Фіг. 3. Розглянемо орієнтацію двокомпонентних датчиків у неортогональному вимірювальному блоці. На фіг. 1 показано кінематику запропонованого способу розміщення двокомпонентних датчиків, а на фіг. 2 показано розміщення 3 двокомпонентних датчиків за запропонованим способом. Для знаходження оптимальних значень кутів орієнтації α, β застосуємо метод інформаційних фільтрів (див. Guerrier St., "Integration of Skew-Redundant MEMS-IMU with GPS for Improved Navigation Performance", Master Project, Geodetic Engineering Laboratory, Ecole Lausanne Polytechnics Institute, June 2008). Для наглядності знаходження матриці Η кінематика 1 UA 106796 C2 вибраного способу орієнтації показана на Фіг. 1. Кут χ на Фіг. 1 є сталим параметром, значення якого залежить від кількості двокомпонентних датчиків 360 , n 3,4,5,..., N де n 3 120 . n Тоді запишемо матрицю вимірювань для описаного способу 5 cos 0 sin 360 360 cos cos sin cos sin n n _______ ________ ___ 360 i 1 360 i 1 cos cos sin cos sin n n ________ ________ ___ 360 n 1 360 n 1 cos sin cos sin cos n n cos sin sin cos cos 360 360 sin sin cos sin cos cos n n H 360 360 cos cos sin sin cos sin n n ________ ________ _______ 360 i 1 360 i 1 sin sin cos sin n n cos cos cos 360 i 1 cos sin sin 360 i 1 cos sin n n ________ ________ ________ 360 n 1 sin 360 n 1 sin cos sin n n cos cos 360 n 1 360 n 1 cos sin sin cos sin cos . * Знайдемо інформаційну матрицю, що описує дану конфігурацію. Це матриця Н , що є * діагональною матрицею розміром 3×3. Запишемо діагональні елементи матриці Н h* 0 0 11 * * T H H H 0 h22 0 * 0 0 h33 2 UA 106796 C2 * h11 cos 2 cos 2 360 2 360 360 i 1 cos 2 cos cos 2 ... cos 2 cos 2 ... n n n 360 n 1 360 360 cos 2 cos 2 sin 2 sin sin cos cos sin n n n 2 cos 2 2 360 2 360 360 i 1 sin sin cos cos sin ... sin sin n n n 2 360 i 1 360 n 1 360 n 1 cos sin ... sin sin cos cos sin n n n 2 cos 2 360 2 360 360 i 1 360 n 1 cos 2 1 cos 2 cos 2 ... cos 2 ... cos 2 ... n n n n n 360 360 360 cos 2 cos 2 sin 2 sin 2 sin 2 2 sin cos sin cos sin 2 n n n 360 2 360 2 360 2 360 cos 2 cos 2 sin 2 sin 2 sin 2 2 sin cos sin cos sin n n n n 2 360 360 i 1 2 360 i 1 360 i 1 cos 2 cos 2 sin 2 ... sin 2 sin 2 sin cos n n n n 360 i 1 360 n 1 2 sin cos sin cos 2 cos 2 sin 2 ... sin 2 sin n n 360 n 1 360 n 1 360 n 1 2 sin cos sin cos sin cos 2 cos 2 sin 2 n n n n 360 2 360 360 i 1 cos 2 cos 2 sin 2 1 cos 2 cos 2 ... cos ... 2 n n n cos 2 sin 2 360 n 1 2 360 360 i 1 2 2 360 sin 2 ... sin 2 ... sin sin n n n n 360 n 1 n 2 2 2 2 cos cos sin sin n 2 n cos 2 cos 2 sin 2 sin 2 . 2 Тепер є можливість записати критерій для вибору оптимальної орієнтації будь-якої кількості двокомпонентних датчиків: h* 22 5 2 n3 (1) 1 cos2 sin2 1 cos2 sin2 . , 4 Як видно, для будь-якої кількості датчиків критерій матиме максимальне значення при одних 10 3 і тих значеннях кутів α та β, відрізняючись лиш рівнем n . А тому, не втрачаючи загальності 4 викладу, покажемо умови, при яких досягається максимальна точність при використанні n=3 двокомпонентних датчиків. Отже, використовуючи вираз (1), ми можемо записати критерій для вибору оптимальної орієнтації 3-х двокомпонентних датчиків на основі інформаційних фільтрів: J max det H* max * * J max det H* max h11h* h33 22 , 2 2 2 2 max 6,75 cos sin cos sin , sin 2 2 2 2 cos cos .(2) Після спрощення можна переписати вираз (2) у вигляді 2 J max 6,75 1 cos2 sin2 1 cos2 sin2 . , (3) Знайдемо екстремум функції (3). Спочатку запишемо частинну похідну по куту α J 0 3 UA 106796 C2 ; cos sin 2 cos sin sin 0 1 2 cos sin cos sin sin 2 2 cos sin 1 cos 1 sin 2 sin cos sin 3 cos sin 0 . 1 2 1 cos2 sin2 2 cos sin sin2 1 cos2 sin2 2 2 2 2 2 5 2 2 2 2 2 2 2 2 2 sin 2 0 ; 2 Розв'язки α=0; 90; 180; 270 та β=0; 180 не задовольняють критерій, так як відповідають випадку дублювання датчиків. Розглянемо два інших співмножники, що залишилися 1 cos2 sin2 0; 2 2 3 cos sin 0; 10 1 (4) 2 ; a) sin 2 cos á) sin2 3 . cos2 2 У силу того, що соs α[0;1] вищезазначені умови не задовольняють критерій із-за того, що чи матриця вимірювань вироджується ((4).а), чи із-за того, що дана умова дає результати, котрі лежать поза областю допустимих значень (ОДЗ) тригонометричної функції ((4).b). Тобто дана функція має екстремум у точках α=0; 90; 180; 270 та β=0; 180, але ці точки відповідають його мінімуму, а тому не задовольняють задачу оптимальної орієнтації. Проте можна точно стверджувати, що критерій (3) має своїм максимальним значенням наступне число (згідно з методом інформаційних фільтрів): 3 15 20 3 n 6 Jmax 8 . D 3 Можна зробити висновок, що критерій не має екстремуму з максимальним значенням 8, проте все одно існують точки, котрі його максимізують. Отже, повинні існувати криві, що залежать від α та β, котрі максимізують вибраний критерій. Для підтвердження цього твердження було побудовано поверхню, що зображає динаміку критерію в залежності від α та β (див. Фіг. 3). Знайдемо умову максимізації критерію, знайшовши частинну похідну по куту β (записавши 2 2 для спрощення викладок α =cos α): J 0 2 1 a 2 sin 2 2a 2 sin cos 1 a 2 sin 2 ; 2a sin cos 0 sin cos a sin 2 2a sin 1 1 a 2 sin 2 2 2 2 2 2 2 2a 2 1 a 2 sin2 0 . За максимум вибраного критерію відповідає вираз 25 1 3a 2 sin 2 0; , (5) 1 sin 2 . 2 3a З (5) видно, що даний вираз задовольняє ОДЗ тригонометричних функцій критерію. Також з (5) можна отримати залежність між кутами, котра дозволяє максимізувати (3) і визначити область значень, при яких можливе досягнення максимального значення критерію. Дана умова знаходиться з умови задоволення ОДЗ тригонометричних функцій і становить 2 1 a ; . 1; 3a 2 1 0; 3 2 3a a cos 1 Отже 30 1 1 , cos 1; ;1 3 3 54.735 ;54.735 125 .265 ;234 .735 . А кут β при цьому 1 arcsin n , n 3,4,... . (6) 3a 4 UA 106796 C2 5 10 15 Таким чином, задаючись кутом α у допустимій ОДЗ і розрахувавши згідно з (6) кут β, ми можемо досягти максимуму вибраного інформаційного критерію. Отже, існує нескінченна кількість оптимальних орієнтацій за вибраним способом орієнтації, окрім того початковий кінематичний кут можна задавати згідно з певними практичними міркуваннями. Отже, підсумуємо алгоритм використання способу: 1. Вибрати кількість двокомпонентних датчиків, що будуть використовуватися у надлишковому вимірювальному блоці, n≥3. 2. Визначити кут χ, через який будуть розташовуватися перші осі чутливостей двокомпонентних датчиків: 360 . n 3. Вибрати кут α із вказаної області значень 54,735 ;54,735 125,265 ;234,735 . 4. Розрахувати кут β за формулою 1 arcsin n , n 0;1 . Вибрати одне із чотирьох можливих значень кута β. 3a 5. Використовуючи розраховані параметри, розташувати датчики у надлишковому вимірювачі наступним чином: a) першу вісь чутливості датчика сумістити з поздовжньою віссю ξ надлишкового вимірювача. При цьому друга вісь чутливості має бути розміщена в площині ξOη, що створена поздовжньою ξ та поперечною η віссю надлишкового вимірювача. b) повернути і-ий датчик на відповідний йому кут 20 360 i 1 . n с) підняти першу вісь чутливості на кут α над площиною ξOη, що створена поздовжньою ξ та поперечною η віссю надлишкового вимірювача. При цьому друга вісь чутливості датчика має залишатися нерухомою. d) повернути двокомпонентний датчик навколо першої осі чутливості на кут β. 25 ФОРМУЛА ВИНАХОДУ Спосіб оптимального розміщення двокомпонентних датчиків у вимірювачі векторних величин, який відрізняється тим, що перші осі чутливостей двокомпонентних датчиків розташовують рівномірно на поверхні конуса, твірна якого відхилена на кут 30 54,735 ; 54,735 125,265 ; 234,735 від площини, що створена поздовжньою та поперечною осями вимірювача, а положення другої осі чутливості кожного з двокомпонентних датчиків визначають поворотом навколо його першої осі чутливості на кут β, який розраховують 1 n , n 0; 1 . згідно з формулою arcsin 3 cos 5 UA 106796 C2 6 UA 106796 C2 Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюMeleshko Vladyslav Valentynovych, Lakoza Serhii Leonidovych
Автори російськоюМелешко Владислав Валентинович, Лакоза Сергей Леонидович
МПК / Мітки
МПК: G01C 21/00
Мітки: датчиків, вимірювачі, розміщення, оптимального, векторних, спосіб, двокомпонентних, величин
Код посилання
<a href="https://ua.patents.su/9-106796-sposib-optimalnogo-rozmishhennya-dvokomponentnikh-datchikiv-u-vimiryuvachi-vektornikh-velichin.html" target="_blank" rel="follow" title="База патентів України">Спосіб оптимального розміщення двокомпонентних датчиків у вимірювачі векторних величин</a>
Градієнтний спосіб оптимального розміщення джерел теплоти з заданими геометричними і фізичними характеристиками теплового обладнання м`ясної промисловості
Номер патенту: 36444
Опубліковано: 27.10.2008
Автори: Ощипок Ігор Миколайович, Ярошевич Володимир Ігоревич, Занічковська Любов Володимирівна
МПК: A23B 4/00
Мітки: оптимального, теплоти, теплового, геометричними, джерел, обладнання, фізичними, промисловості, характеристиками, спосіб, заданими, градієнтний, м`ясної, розміщення
Формула / Реферат:
Градієнтний спосіб оптимального розміщення джерел теплоти з заданими геометричними і фізичними характеристиками теплового обладнання м'ясної промисловості, що включає їх нагрівання, витримування при температурі середовища, розрахунок режиму теплової обробки, який відрізняється тим, що координати фіксованої точки джерела Z* - полюса і розміщення джерела відносно основної системи координат визначають з умови, при якій задана функція мети k(Z)...
Рекурентний спосіб оптимального керування комплексуванням вимірників при нерівно точних вимірах фізичних величин
Номер патенту: 45289
Опубліковано: 10.11.2009
Автори: Нікулін В'ячеслав Ігорович, Кудренко Станіслава Олексіївна, Конахович Георгій Филимонович, Ігнатов Володимир Олексійович
МПК: G01C 3/00
Мітки: величин, вимірників, спосіб, точних, керування, оптимального, фізичних, вимірах, рекурентний, нерівної, комплексуванням
Формула / Реферат:
Рекурентний спосіб оптимального керування комплексуванням вимірників при нерівно точних вимірах фізичних величин, у якому для вимірювання значення фізичної величини послідовно, такт за тактом, застосовують m≥2 вимірювальних систем з різними погрішностями вимірювань, результати вимірювань запам'ятовують і по них за допомогою формул непрямих вимірювань обчислюють істинне значення фізичної величини, який відрізняється тим, що оптимальну...
Паралельний спосіб оптимального керування комплексуванням вимірників при нерівно точних вимірах фізичних величин
Номер патенту: 45288
Опубліковано: 10.11.2009
Автори: Ігнатов Володимир Олексійович, Конахович Георгій Филимонович, Кудренко Станіслава Олексіївна, Нікулін В'ячеслав Ігорович
МПК: G01C 3/00
Мітки: паралельний, величин, спосіб, комплексуванням, точних, вимірах, вимірників, оптимального, фізичних, нерівної, керування
Формула / Реферат:
Паралельний спосіб оптимального керування комплексуванням вимірників при нерівно точних вимірах фізичних величин, у якому для вимірювання значення фізичної величини паралельно застосовують декілька вимірювальних систем з різними погрішностями вимірювань, результати вимірювань запам'ятовують і по них за допомогою формул непрямих вимірювань обчислюють істинне значення фізичної величини, який відрізняється тим, що вагові коефіцієнти результатів...
Перехідний узгоджуючий пристрій до двокомпонентних калоприймачів
Номер патенту: 5166
Опубліковано: 15.02.2005
Автор: Краснер Юхим Борисович
МПК: A61G 9/00
Мітки: пристрій, узгоджуючий, калоприймачів, двокомпонентних, перехідний
Формула / Реферат:
Перехідний узгоджуючий пристрій до двокомпонентних калоприймачів, який виконаний у вигляді тонкої плоскої пластинки з отвором по її центру і фланцевими кільцями з обох її сторін, які розташовані концентрично відносно отвору, причому фланцеве кільце, розташоване з однієї сторони тонкої плоскої пластинки, сумісно з пластиною двокомпонентного калоприймача одного виробника, а фланцеве кільце, розташоване з іншої сторони тонкої плоскої пластинки,...
Спосіб виготовлення двокомпонентних вибухових речовин із гранульованої аміачної селітри і нафтопродукту, наприклад дизельного палива
Номер патенту: 77073
Опубліковано: 16.10.2006
Автори: Шварцер Валерій Якович, Межебовська Ірина Володимирівна, Яровинський Володимир Єфимович, Кішкін Петро Іванович, Римарчук Борис Іванович, Корнет Валентин Валентинович, Бережецький Анатолій Якович, Єфремов Ернест Іванович
МПК: C06B 25/00
Мітки: палива, аміачної, дизельного, наприклад, селітри, речовин, вибухових, нафтопродукту, виготовлення, гранульованої, спосіб, двокомпонентних
Формула / Реферат:
Спосіб виготовлення двокомпонентних вибухових речовин із гранульованої аміачної селітри і нафтопродукту, наприклад дизельного палива, що включає дозування компонентів в заданному співвідношенні, нагрівання гранульованої аміачної селітри до температури 33-35°С, змішування компонентів при атмосферному тиску, який відрізняється тим, що перед змішуванням компонентів нафтопродукт, наприклад дизельне паливо, нагрівають до температури нагрівання...
Попередній патент: Поліестер, проникний для лазерного випромінювання
Наступний патент: Пристрій для випробувань інвалідних колясок
Випадковий патент: Спосіб перевезення вантажів у контейнерах залізничним транспортом