Спосіб використання шатунних кривих для проектування двокривошипних важільних механізмів з регульованою амплітудою коливання кутової швидкості вихідної ланки
Номер патенту: 98746
Опубліковано: 12.05.2015
Автори: Головко Олена Володимирівна, Кіницький Ярослав Тимофійович

Формула / Реферат
Спосіб використання шатунних кривих для проектування двокривошипних важільних механізмів з регульованою амплітудою коливання кутової швидкості вихідної ланки, який включає знаходження центра обертання вихідної ланки, який відрізняється тим, що структурну групу II класу III виду приєднують до шатуна в точці, яка описує шатунну криву, траєкторія якої відрізняється від кола, при цьому центр обертання вихідної ланки розміщують в середині шатунної кривої, яку описує точка приєднання, що дозволяє вихідній ланці здійснювати обертовий рух зі змінною кутовою швидкістю, а змінюючи положення точки приєднання вихідної ланки на шатуні або її центр обертання змінюється амплітуда коливання кутової швидкості цієї ланки.
Текст
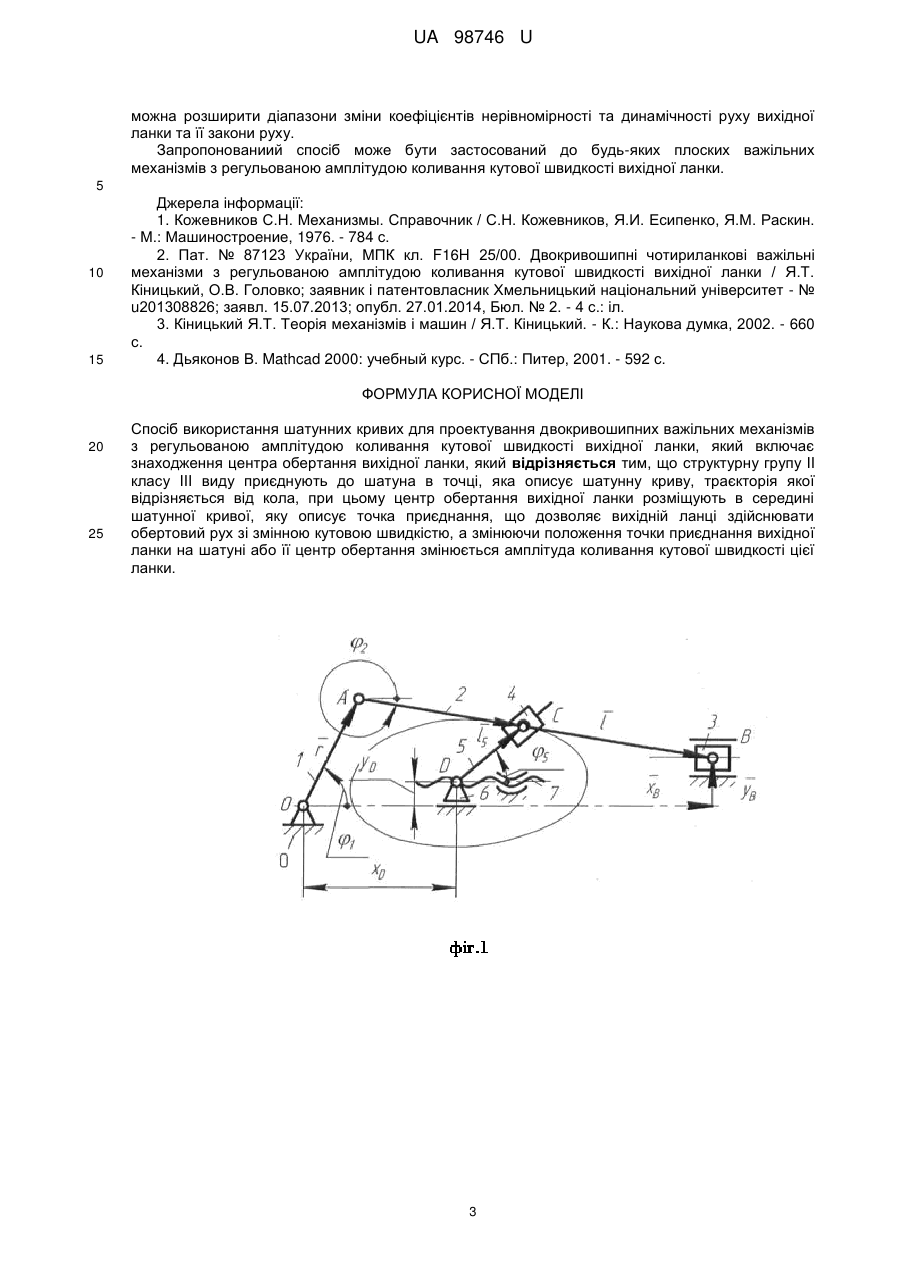
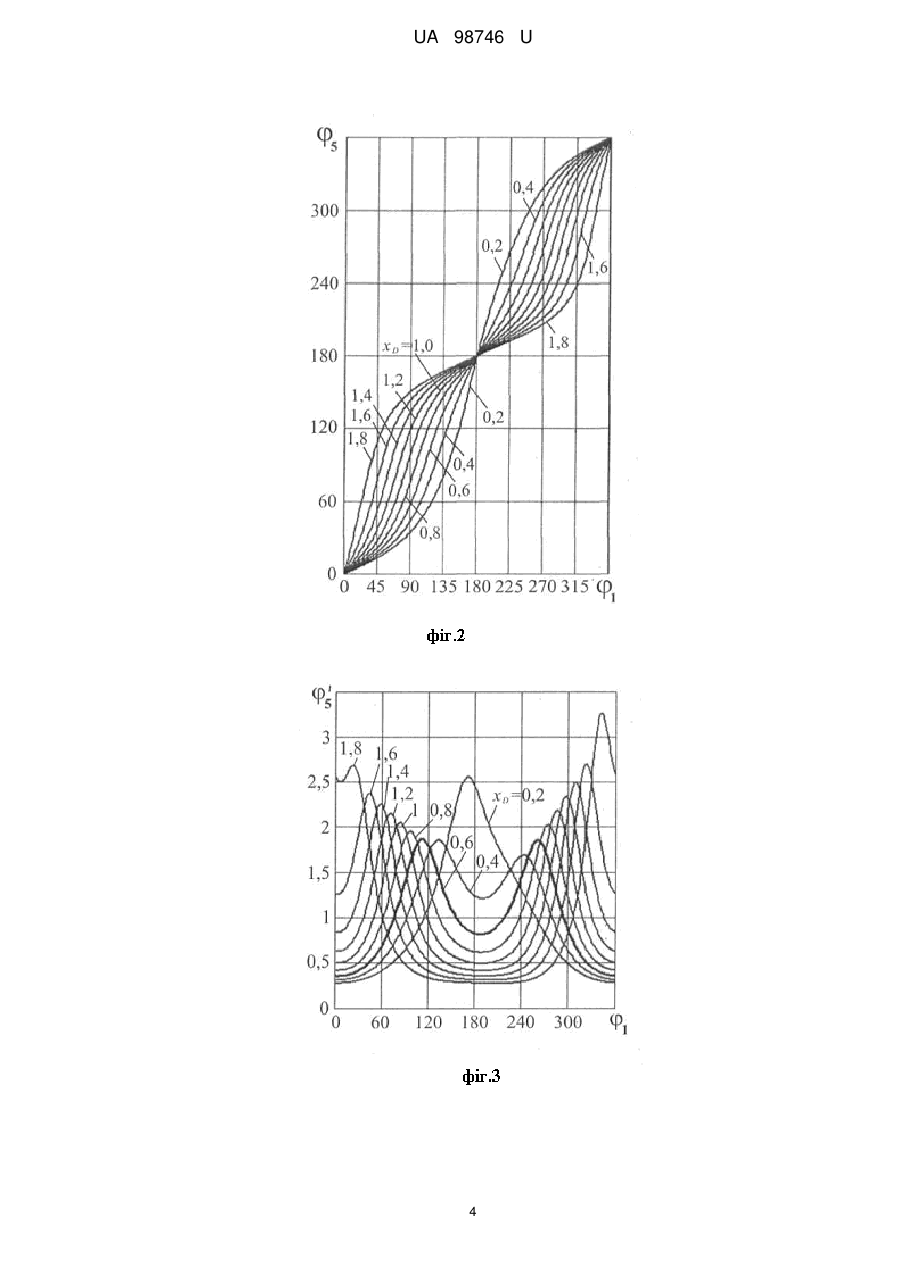
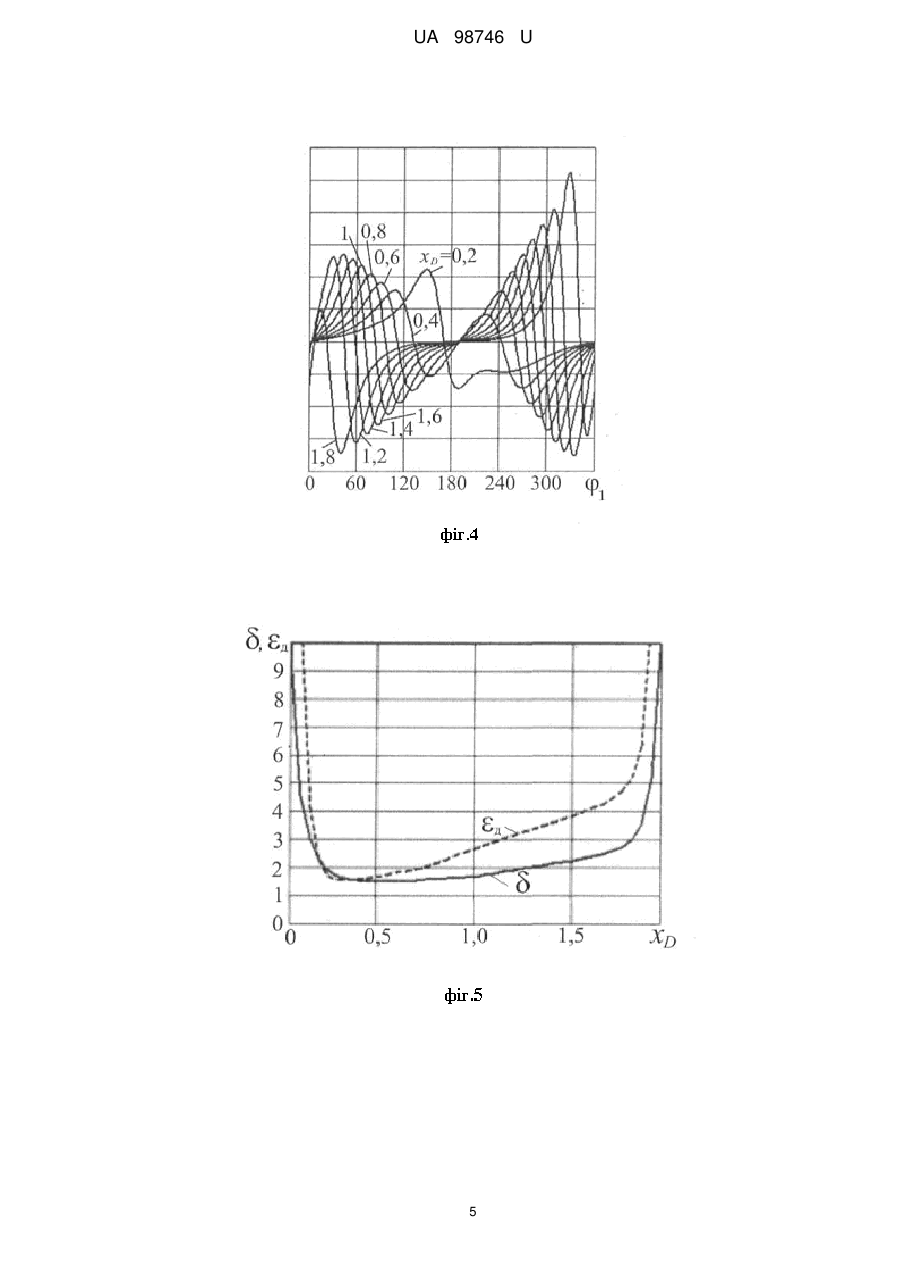
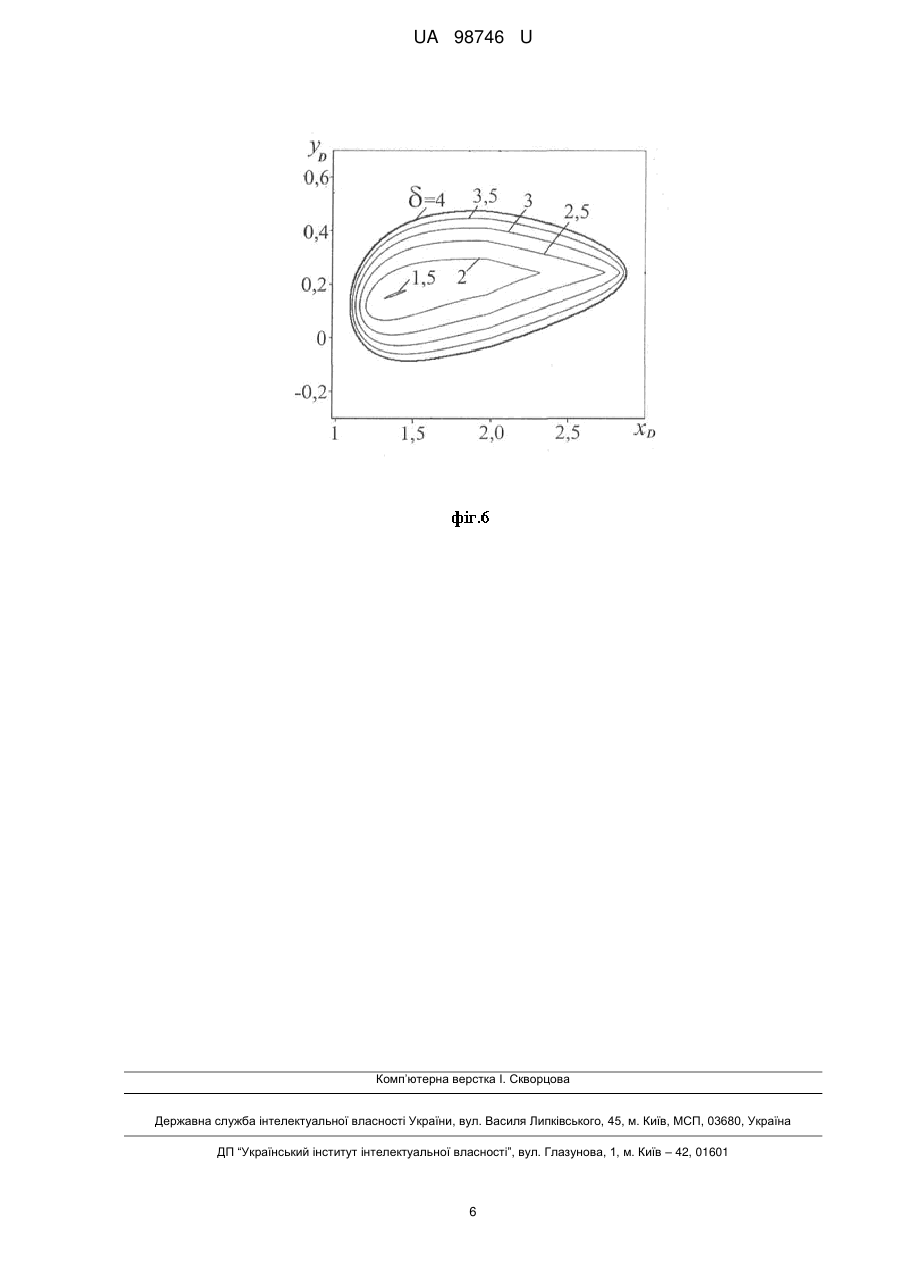
Реферат: Спосіб використання шатунних кривих для проектування двокривошипних важільних механізмів з регульованою амплітудою коливання кутової швидкості вихідної ланки включає знаходження центра обертання вихідної ланки. Структурну групу II класу III виду приєднують до шатуна в точці, яка описує шатунну криву, траєкторія якої відрізняється від кола. Центр обертання вихідної ланки розміщують в середині шатунної кривої, яку описує точка приєднання, що дозволяє вихідній ланці здійснювати обертовий рух зі змінною кутовою швидкістю. Змінюючи положення точки приєднання вихідної ланки на шатуні або її центр обертання змінюється амплітуда коливання кутової швидкості цієї ланки. UA 98746 U (54) СПОСІБ ВИКОРИСТАННЯ ШАТУННИХ КРИВИХ ДЛЯ ПРОЕКТУВАННЯ ДВОКРИВОШИПНИХ ВАЖІЛЬНИХ МЕХАНІЗМІВ З РЕГУЛЬОВАНОЮ АМПЛІТУДОЮ КОЛИВАННЯ КУТОВОЇ ШВИДКОСТІ ВИХІДНОЇ ЛАНКИ UA 98746 U UA 98746 U 5 10 15 20 25 30 35 40 45 Спосіб належить до машинобудування, а саме до механізмів, в яких потрібно забезпечити при рівномірному обертанні вхідної ланки нерівномірне обертання вихідної ланки з регульованою амплітудою коливання її кутової швидкості. Відомі механізми, які дозволять одержати нерівномірний обертовий рух вихідної ланки [1]. До таких механізмів належать зубчасті механізми з некруглими колесами [1, рис. 3.27-3.28], які мають у своєму складі вищу кінематичну пару і складні у виготовлені, та важільні механізми [1, с. 158; рис. 2.57, с. 77; рис. 2.69, с. 79]. Більш прості у виготовленні є важільні механізми, зокрема двокривошипні чотириланкові важільні механізми з регульованою амплітудою коливання кутової швидкості вихідної ланки [2, фіг. 1, 2, с. 2]. Найбільш близьким аналогом за технічною суттю і дією до способу, що пропонується, є спосіб синтезу двокривошипного кулісного механізму [2, фіг. 2, с. 2] з регульованою амплітудою коливання кутової швидкості вихідної ланки, в якому структурна група 2-3 (повзун 2 з кулісою 3) приєднана до кривошипа 1 у точці В, яка описує коло, а за допомогою гвинтової передачі 4-5 змінюється міжосьова відстань між центрами обертання вхідної та вихідної ланок. Недоліком такого способу регулювання амплітудою коливання кутової швидкості вихідної ланки є порівняно обмежений діапазон зміни коефіцієнтів нерівномірності і динамічності руху вихідної ланки. В основу корисної моделі поставлена задача - розширення діапазону зміни коефіцієнтів нерівномірності і динамічності руху вихідної ланки. Поставлена задача вирішується тим, що спосіб використання шатунних кривих для проектування двокривошипних важільних механізмів з регульованою амплітудою коливання кутової швидкості вихідної ланки, який включає знаходження центра обертання вихідної ланки, згідно з корисною моделлю, структурну групу II класу III виду приєднують до шатуна в точці, яка описує шатунну криву, траєкторія якої відрізняється від кола, при цьому центр обертання вихідної ланки розміщують в середині шатунної кривої, яку описує точка приєднання, що дозволяє вихідній ланці здійснювати обертовий рух зі змінною кутовою швидкістю, а змінюючи положення точки приєднання вихідної ланки на шатуні або її центр обертання змінюють амплітуду коливання кутової швидкості цієї ланки. На кресленнях представлено: фіг. 1. - Кінематична схема двокривошипного шестиланкового важільного механізму з регульованою міжосьовою відстанню. фіг. 2. - Діаграми кутових переміщень ланки 5. фіг. 3. - Діаграми аналогів кутових швидкостей ланки 5. фіг. 4. - Діаграми аналогів кутових прискорень ланки 5. фіг. 5.- Діаграми зміни коефіцієнтів нерівномірності руху та динамічності д . фіг. 6. - Ізолінії коефіцієнтів нерівномірності руху . Алгоритм реалізації обчислень наступний: 1. Для прикладу виконання вибирають кривошипно-повзунний механізм (фіг. 1) (ланки 0, 1, 2, 3). 2. Визначають шатунну криву (траєкторія точки С) даного механізму (рис. 1). [3, с. 58-60]. 3. До механізму у точці С приєднують структурну групу II класу III виду (за класифікацією Ассура-Артоболевського, ланки 4 і 5), причому центр обертання вихідної ланки 5 розміщують в середині шатунної кривої, яку описує точка С. В такому випадку ланка 5 також буде здійснювати обертовий рух зі змінною кутовою швидкістю. Міняючи положення точки С на шатуні 2 або центра обертання ланки 5 в середині шатунної кривої, змінюється амплітуда коливання кутової швидкості цієї ланки. Конструктивно більш зручно регулювання здійснювати зміною положення центра обертання ланки 5, яке можна здійснювати навіть під час руху механізму. Такі механізми легко вписуються в системи автоматичного керування машин. 4. Кулісу 5 встановлюють на рухомій опорі 6 і стає другим кривошипом, положення якої 2 50 та динамічності д : 55 2 регулюють гвинтом 7, що дозволяє змінювати міжосьову відстань а ( a OD xD yD ). При рівномірному обертанні кривошипа 1 ланка 5 обертається нерівномірно. 5. Згідно з [3], за наступними формулами (1), знаходяться коефіцієнт нерівномірності руху 5 max 5 min д 5max 2 c c , (1) , де 5max , 5 min - відповідно максимальна і мінімальна кутова швидкість ланки 5; 1 UA 98746 U c - її середня кутова швидкість, у нашому випадку c 1 ; 5max - максимальне кутове прискорення ланки 5. 5 6. Для визначення основних кінематичних параметрів механізму використовується метод замкнених векторних контурів [3]. Цей механізм можна зобразити у вигляді двох замкнених векторних контурів ОАВ (фіг. 1), для яких маємо такі векторні рівняння: r l xB yB , (2) r lAC xD yD l5 , (3) 10 дe r lOA , l l AB , l5 lCD . Спроектовують ці векторні контури на координатні осі x і y та записують рівняння проекцій на них: r cos 1 r cos 2 xB , r sin 1 r sin 2 yB ; (4) r cos 1 lAC cos 2 xD l5 cos 5 , r sin 1 lAC sin 2 yD l5 sin 5 , (5) де 1 - узагальнена координата (кут повороту кривошипа). Значення кутів 2 і 5 можна одержати відповідно із рівнянь (4) і (5): 15 2 arcsin yD r sin 1 arctg r sin 1 lAC sin 2 yD 5 r sin 1 lAC cos 2 xD . (6) l ; Диференціюючи рівняння (6) за узагальненою координатою механізму 1 , одержують ' залежності для визначення аналогів кутових швидкостей шатуна 2 2 d2 / d1 , та ланки 5 '5 d5 / d1 . Повторно диференціюючи рівняння (6) за узагальненою координатою механізму 1 , одержуються залежності для визначення аналогів кутових прискорень відповідних ланок: 20 '2 d'2 / d1 d22 / d21 та '5 d'5 / d1 d25 / d21 . Знаючи аналоги швидкостей і прискорень, знаходять дійсні фізичні величини за формулами. [1] ( 1 const ): 2 2 2 '21 , 5 '51 , 2 '21 , 5 '51 , (7) де i - кутова швидкість відповідної ланки (і=2 або 5); 25 30 i - їх кутові прискорення. При 1 1 швидкості та прискорення чисельно дорівнюють відповідним аналогам. 7. На основі вказаного алгоритму складається комп'ютерна програма в системі Mathcad [4], яка дозволяє виконати аналітичне дослідження кінематики механізмів і встановити вплив положення центра обертання ланки 5 на характер зміни основних кінематичних параметрів руху вихідної ланки, зокрема на величину її коефіцієнтів нерівномірності руху та динамічності. На фіг. 2-4 наведені основні кінематичні діаграми ланки 5 залежно від відстані x D ( xD min xD xD max ). Аналогічні діаграми можна одержати зміною положення центра обертання ланки 5 вздовж осі ординат чи відносно будь-якої іншої прямої. На фіг. 5 наведені діаграми зміни коефіцієнтів нерівномірності руху та динамічності д 35 залежно від відстані x D ( xD min xD xD max ). За допомогою цих діаграм, знаючи потрібні значення або д , можна знайти відповідний діапазон регулювання положення центра обертання ланки 5 або навпаки, знаючи положення центра обертання ланки 5, можна знайти 40 відповідне значення чи д . На фіг. 6 наведено приклад геометричних місць (ізолінії) однакових значень коефіцієнтів , нерівномірності руху в межах 15 4 . Вибираючи різні точки на цих лініях ми не змінюємо коефіцієнт нерівномірності руху вихідної ланки, проте змінюємо її закон руху. Таким чином, використовуючи шатунні криві для проектування двокривошипних важільних механізмів з регульованою амплітудою коливання кутової швидкості вихідної ланки, що включає знаходження центра обертання вихідної ланки, що знаходиться в середині шатунної кривої, 2 UA 98746 U можна розширити діапазони зміни коефіцієнтів нерівномірності та динамічності руху вихідної ланки та її закони руху. Запропонованиий спосіб може бути застосований до будь-яких плоских важільних механізмів з регульованою амплітудою коливання кутової швидкості вихідної ланки. 5 10 15 Джерела інформації: 1. Кожевников С.Н. Механизмы. Справочник / С.Н. Кожевников, Я.И. Есипенко, Я.М. Раскин. - М.: Машиностроение, 1976. - 784 с. 2. Пат. № 87123 України, МПК кл. F16H 25/00. Двокривошипні чотириланкові важільні механізми з регульованою амплітудою коливання кутової швидкості вихідної ланки / Я.Т. Кіницький, О.В. Головко; заявник і патентовласник Хмельницький національний університет - № u201308826; заявл. 15.07.2013; опубл. 27.01.2014, Бюл. № 2. - 4 с.: іл. 3. Кіницький Я.Т. Теорія механізмів і машин / Я.Т. Кіницький. - К.: Наукова думка, 2002. - 660 с. 4. Дьяконов В. Mathcad 2000: учебный курс. - СПб.: Питер, 2001. - 592 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Спосіб використання шатунних кривих для проектування двокривошипних важільних механізмів з регульованою амплітудою коливання кутової швидкості вихідної ланки, який включає знаходження центра обертання вихідної ланки, який відрізняється тим, що структурну групу II класу III виду приєднують до шатуна в точці, яка описує шатунну криву, траєкторія якої відрізняється від кола, при цьому центр обертання вихідної ланки розміщують в середині шатунної кривої, яку описує точка приєднання, що дозволяє вихідній ланці здійснювати обертовий рух зі змінною кутовою швидкістю, а змінюючи положення точки приєднання вихідної ланки на шатуні або її центр обертання змінюється амплітуда коливання кутової швидкості цієї ланки. 3 UA 98746 U 4 UA 98746 U 5 UA 98746 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюGolovko Olena Volodymyrivna
Автори російськоюГоловко Елена Владимировна
МПК / Мітки
МПК: F16H 25/00, F16H 25/16
Мітки: швидкості, коливання, кривих, спосіб, регульованою, вихідної, ланки, двокривошипних, використання, важільних, шатунних, механізмів, амплітудою, кутової, проектування
Код посилання
<a href="https://ua.patents.su/8-98746-sposib-vikoristannya-shatunnikh-krivikh-dlya-proektuvannya-dvokrivoshipnikh-vazhilnikh-mekhanizmiv-z-regulovanoyu-amplitudoyu-kolivannya-kutovo-shvidkosti-vikhidno-lanki.html" target="_blank" rel="follow" title="База патентів України">Спосіб використання шатунних кривих для проектування двокривошипних важільних механізмів з регульованою амплітудою коливання кутової швидкості вихідної ланки</a>
Двокривошипні чотириланкові важільні механізми з регульованою амплітудою коливання кутової швидкості вихідної ланки
Номер патенту: 87123
Опубліковано: 27.01.2014
Автори: Головко Олена Володимирівна, Кіницький Ярослав Тимофійович
МПК: F16H 25/16, F16H 25/00
Мітки: важільні, двокривошипні, коливання, ланки, амплітудою, чотириланкові, швидкості, регульованою, кутової, вихідної, механізмі
Формула / Реферат:
Двокривошипні чотириланкові важільні механізми з регульованою амплітудою коливання кутової швидкості вихідної ланки, які складаються з трьох рухомих ланок, причому, якщо b>а (де a - міжосьова відстань, b - довжина кривошипа), то вхідна ланка - кривошип і вихідна ланка, які з'єднані проміжною ланкою, здійснюють обертовий рух зі змінним передаточним відношенням, амплітуда коливання вихідної ланки при сталій швидкості кривошипа залежить від...
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки
Номер патенту: 53876
Опубліковано: 17.02.2003
Автори: Свєтловський Олександр Борисович, Харжевський В'ячеслав Олександрович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: тривалістю, вихідної, зупинки, ланки, шарнірно-важільний, регульованою, механізм
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з шатуном, який шарнірно зв'язаний з повзуном, який відрізняється тим, що відстань між осями шарнірів і довжина кривошипа регульовані.
Механізм сидорів для претворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання
Номер патенту: 47287
Опубліковано: 17.06.2002
Автори: Сидор Андрій Володимирович, Сидор Богдан Володимирович, Сидор Ольга Богданівна
МПК: F16H 21/48
Мітки: рівномірного, регульованою, нерівномірне, претворення, амплітудою, швидкості, механізм, сидорів, обертання
Формула / Реферат:
Механізм для перетворення рівномірного обертання в нерівномірне з регульованою амплітудою швидкості обертання, який складається з нерухомого корпусу, рухомого корпусу з отвором, кільця, розміщеного в отворі рухомого корпусу з можливістю обертання, двох пальців, закріплених на кільці, двох розміщених концентрично в кільці і рухомому корпусі першого суцільного і другого порожнистого валів, двох важелів, закріплених жорстко на першому...
Шарнірно-важільний механізм з двома регульованими зупинками вихідної ланки
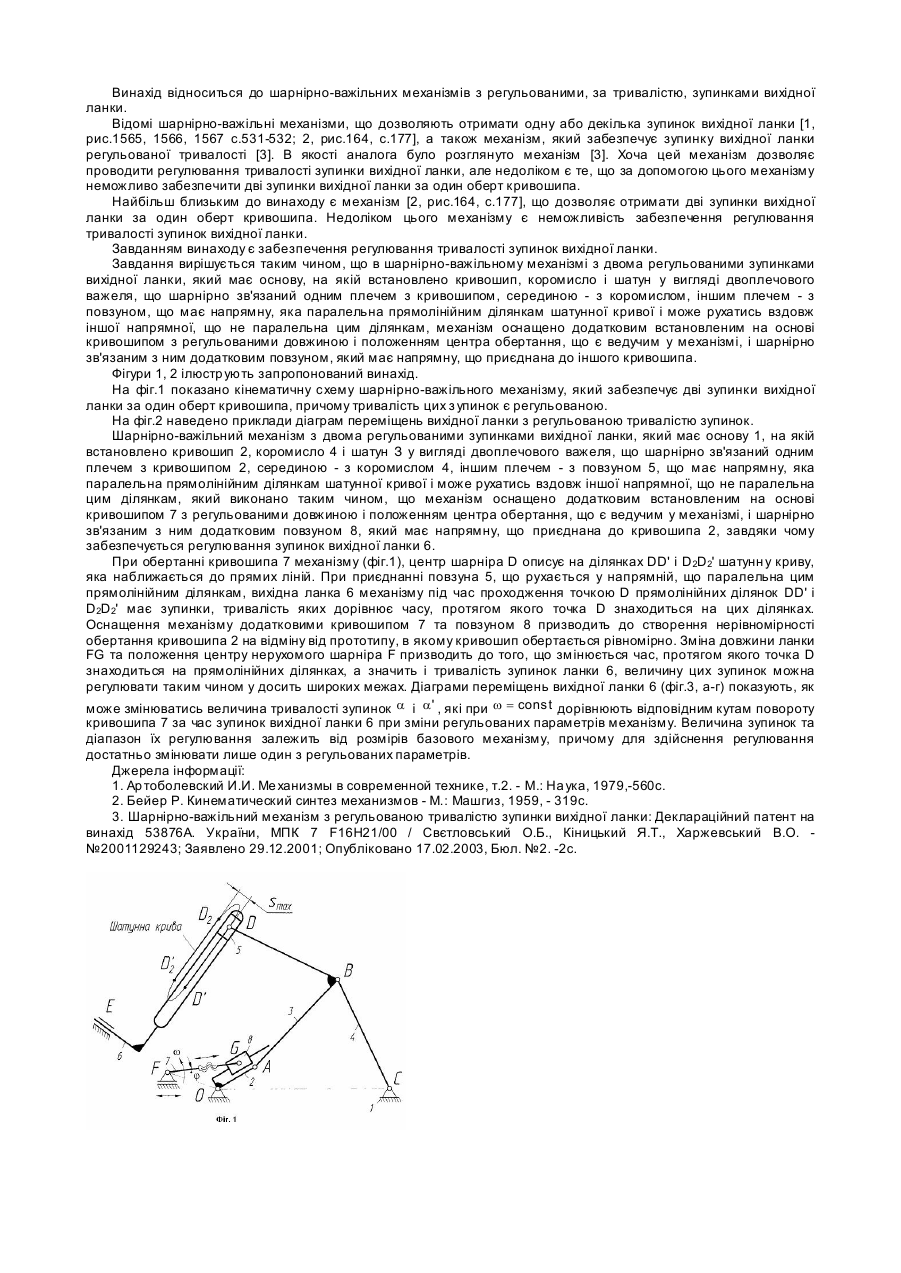
Номер патенту: 66042
Опубліковано: 15.04.2004
Автори: Кіницький Ярослав Тимофійович, Харжевський В'ячеслав Олександрович
МПК: F16H 21/00
Мітки: двома, механізм, зупинками, шарнірно-важільний, регульованими, вихідної, ланки
Формула / Реферат:
Шарнірно-важільний механізм з двома регульованими зупинками вихідної ланки, який має основу, на якій встановлений кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з повзуном, що має напрямну, яка паралельна прямолінійним ділянкам шатунної кривої і може рухатись вздовж іншої напрямної, що не паралельна цим ділянкам, який відрізняється тим, що...
Спосіб визначення кількості та довжини ділянок наближення шатунної кривої до поверхні сфери просторових важільних механізмів
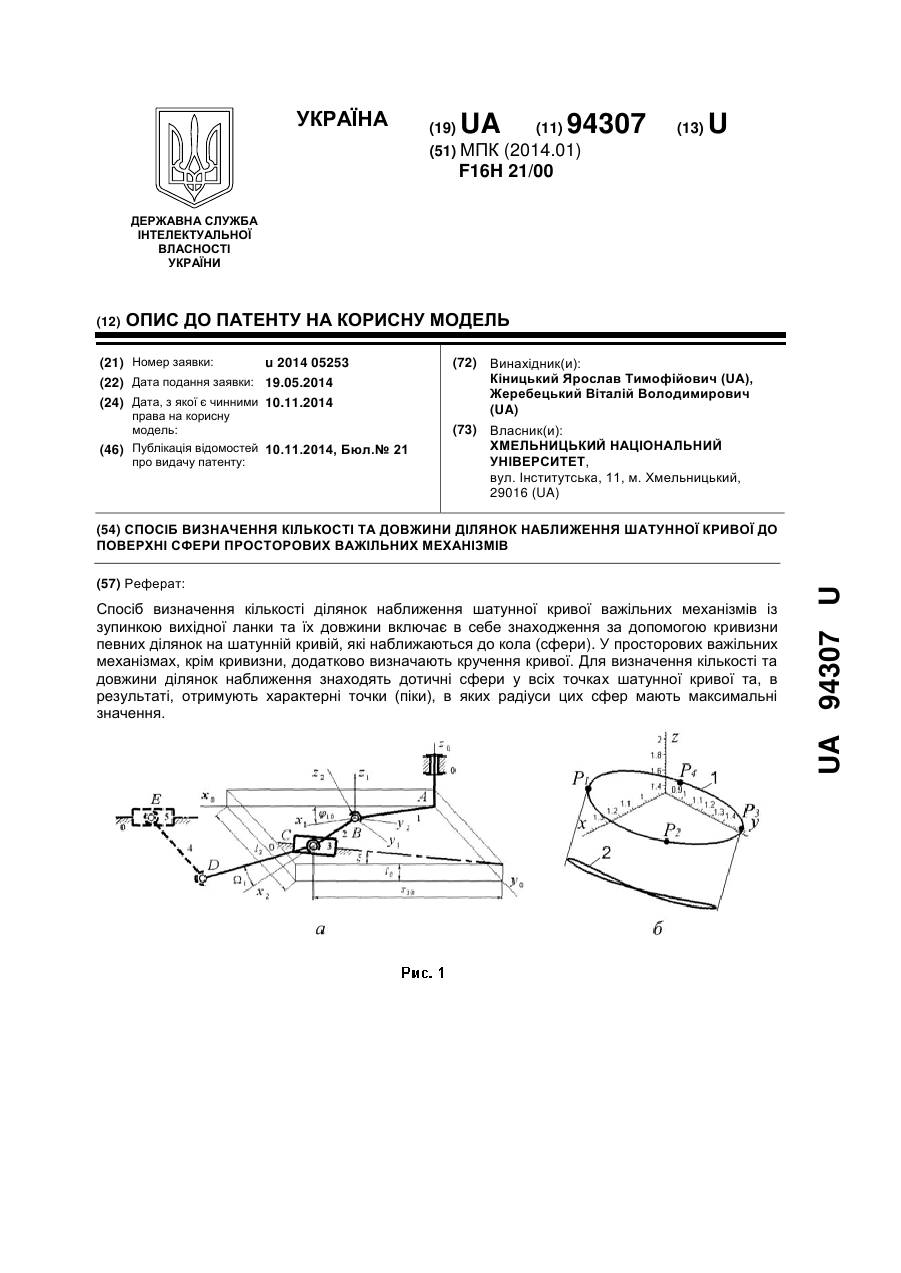
Номер патенту: 94307
Опубліковано: 10.11.2014
Автори: Жеребецький Віталій Володимирович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: визначення, наближення, механізмів, ділянок, просторових, шатунної, довжини, важільних, поверхні, сфери, спосіб, кривої, кількості
Формула / Реферат:
Спосіб визначення кількості ділянок наближення шатунної кривої важільних механізмів із зупинкою вихідної ланки та їх довжини, який включає в себе знаходження за допомогою кривизни певних ділянок на шатунній кривій, які наближаються до кола (сфери), який відрізняється тим, що у просторових важільних механізмах, крім кривизни, додатково визначають кручення кривої, а для визначення кількості та довжини ділянок наближення знаходять дотичні сфери...
Попередній патент: Конструкція модульного стола
Наступний патент: Установка для віброформування об’ємних деталей головних уборів у горизонтальній площині
Випадковий патент: Пристрій для кисневого радіусного різання листового матеріалу